
Model-Free Predictive Power Control for PWM Rectifiers under Asymmetrical Grids


Abstract
:1. Introduction
2. Conventional MPPC Based on Accurate Model
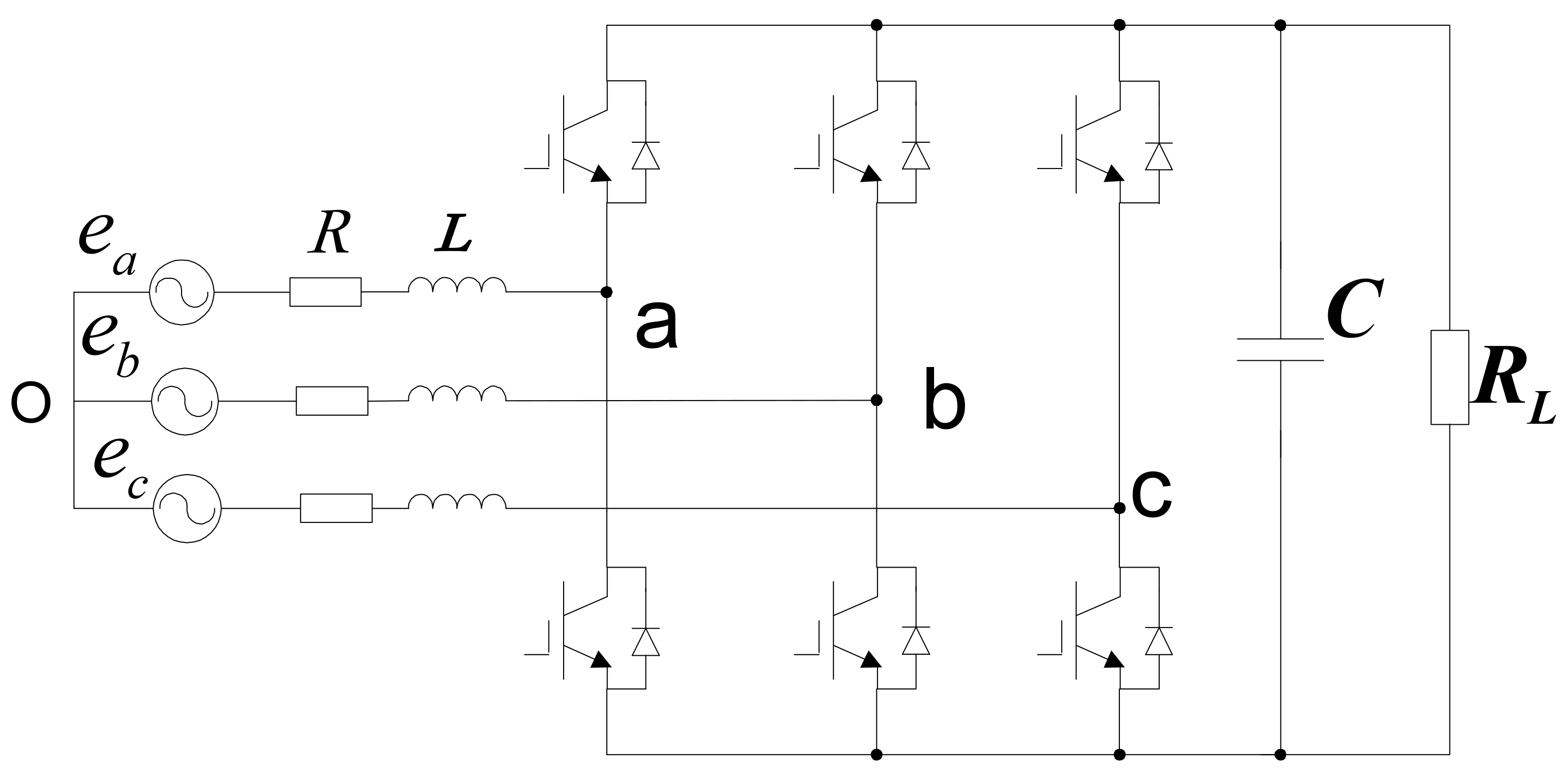
2.1. Accurate Mathematical Model
2.2. Conventional MPPC
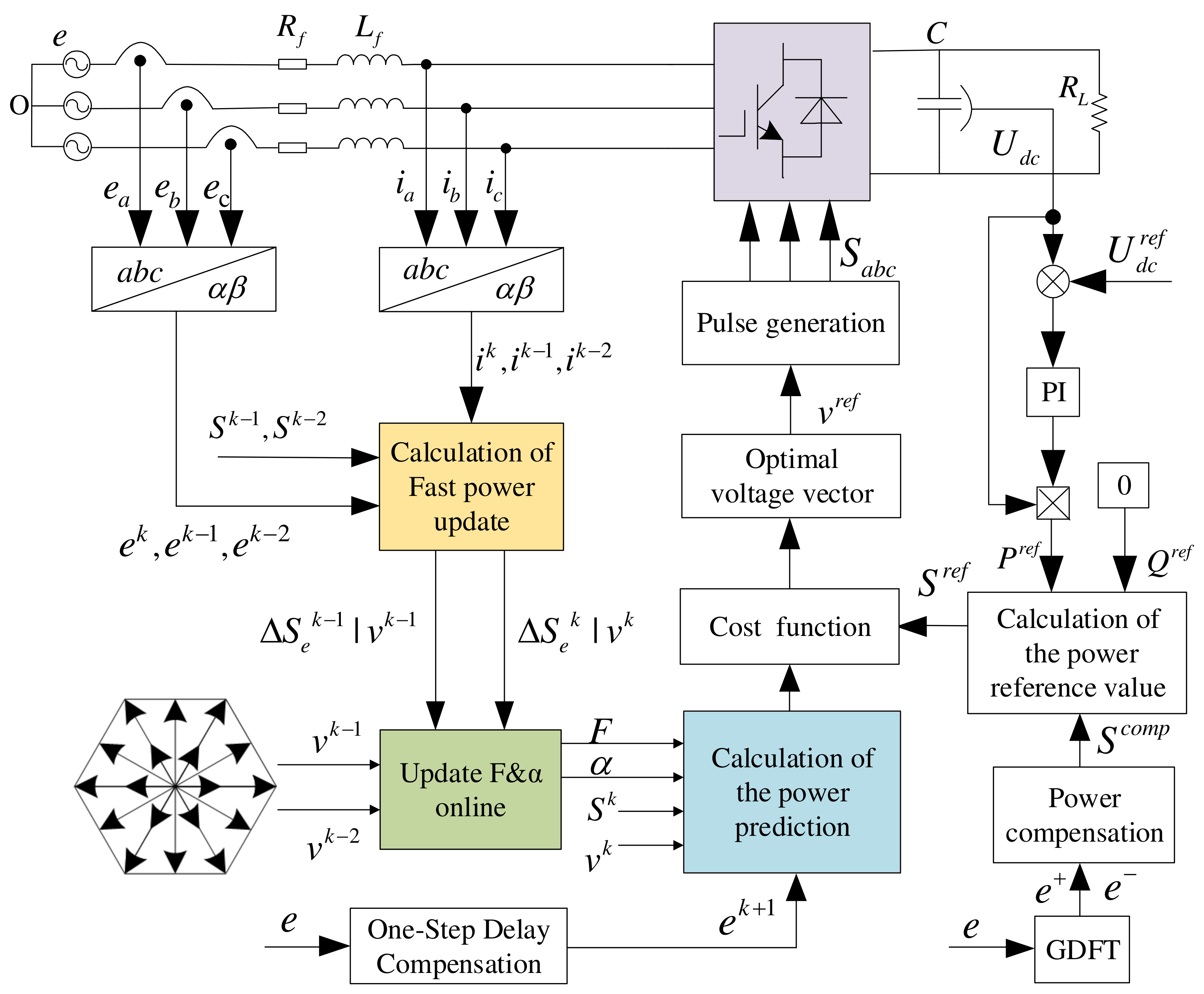
3. Proposed MFPPC Based on Ultralocal Model
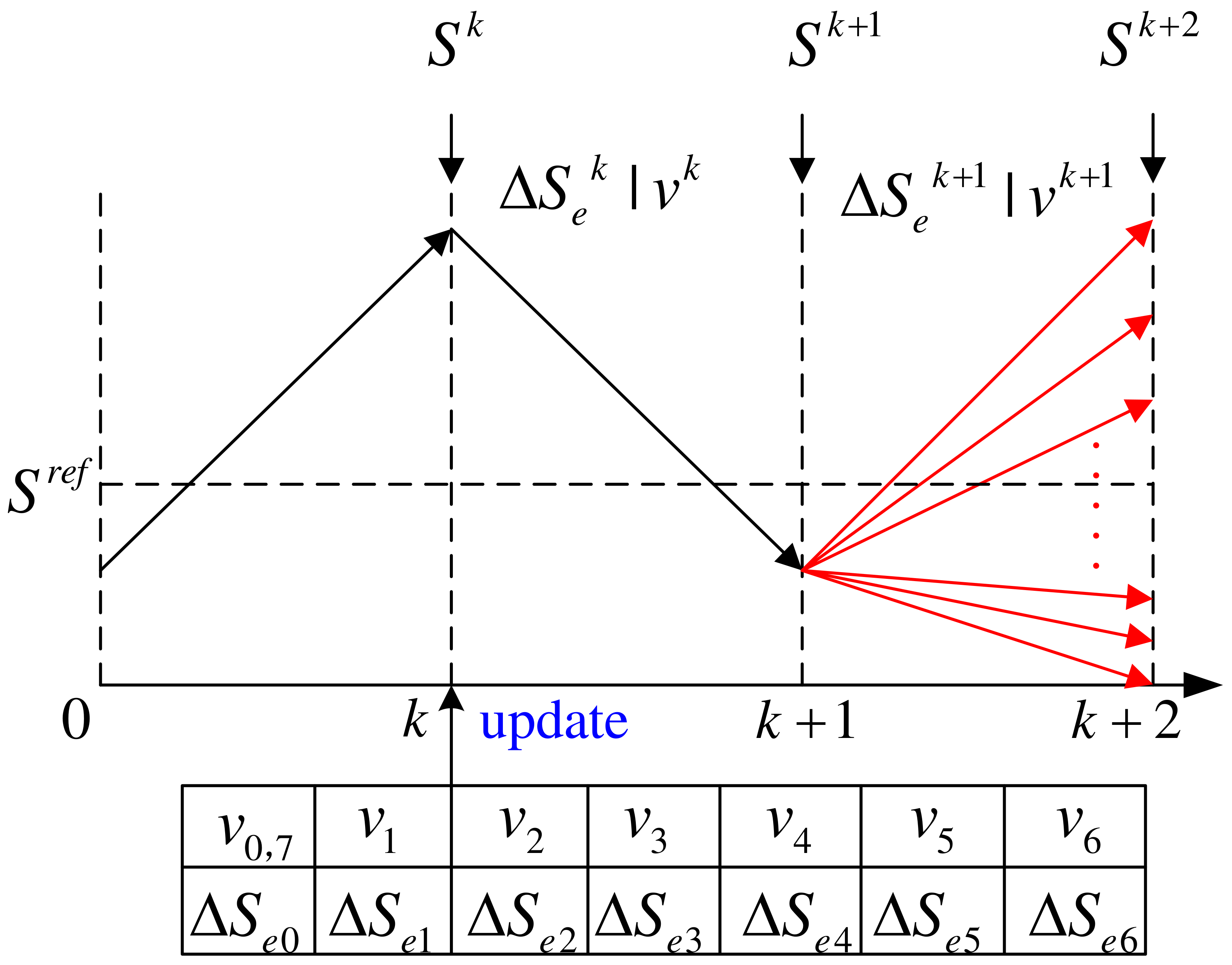
3.1. Principle of the Proposed Basic MFPPC
3.2. Principle of Proposed Improved MFPPC
3.3. Operation under Unsymmetrical Grid Conditions
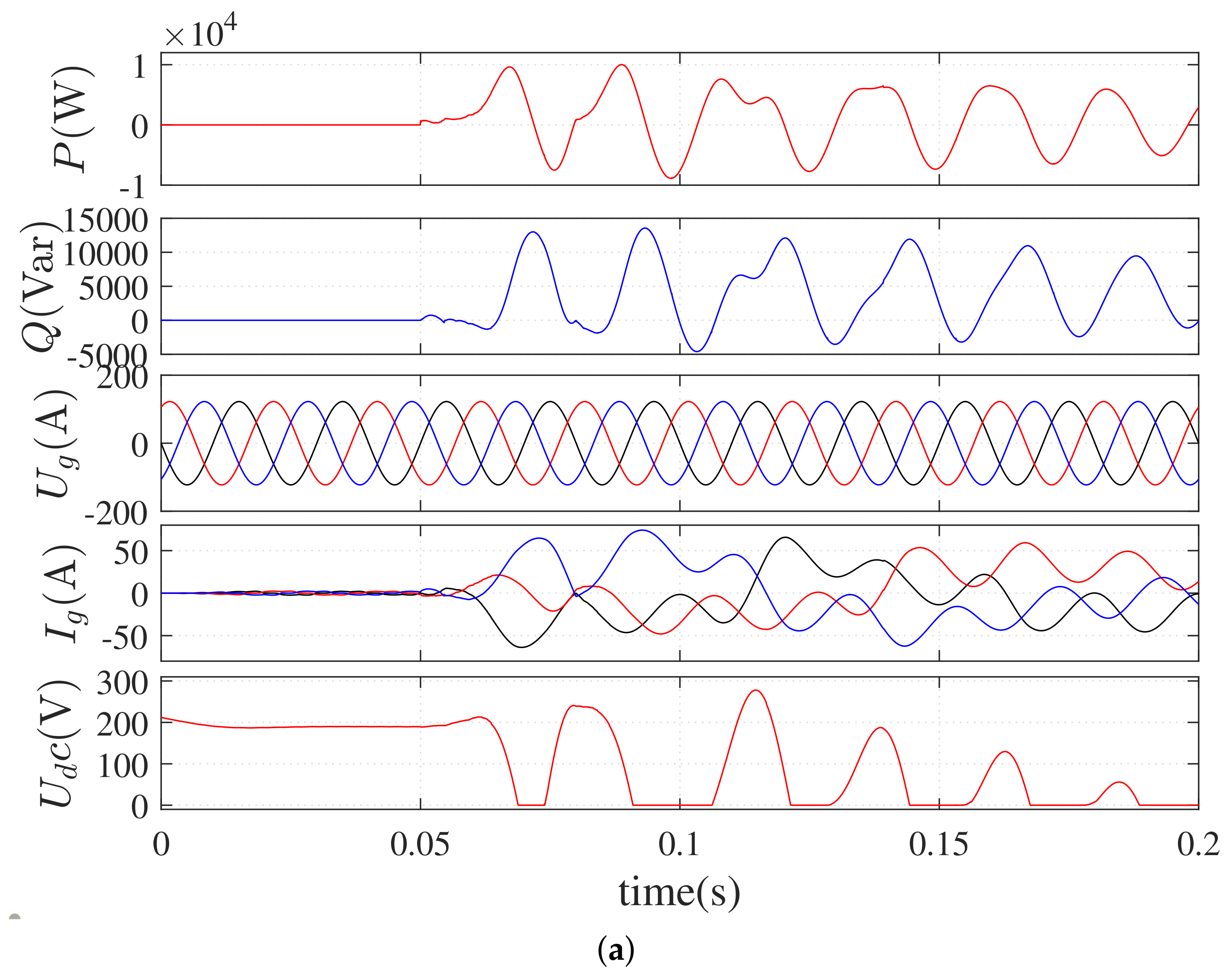
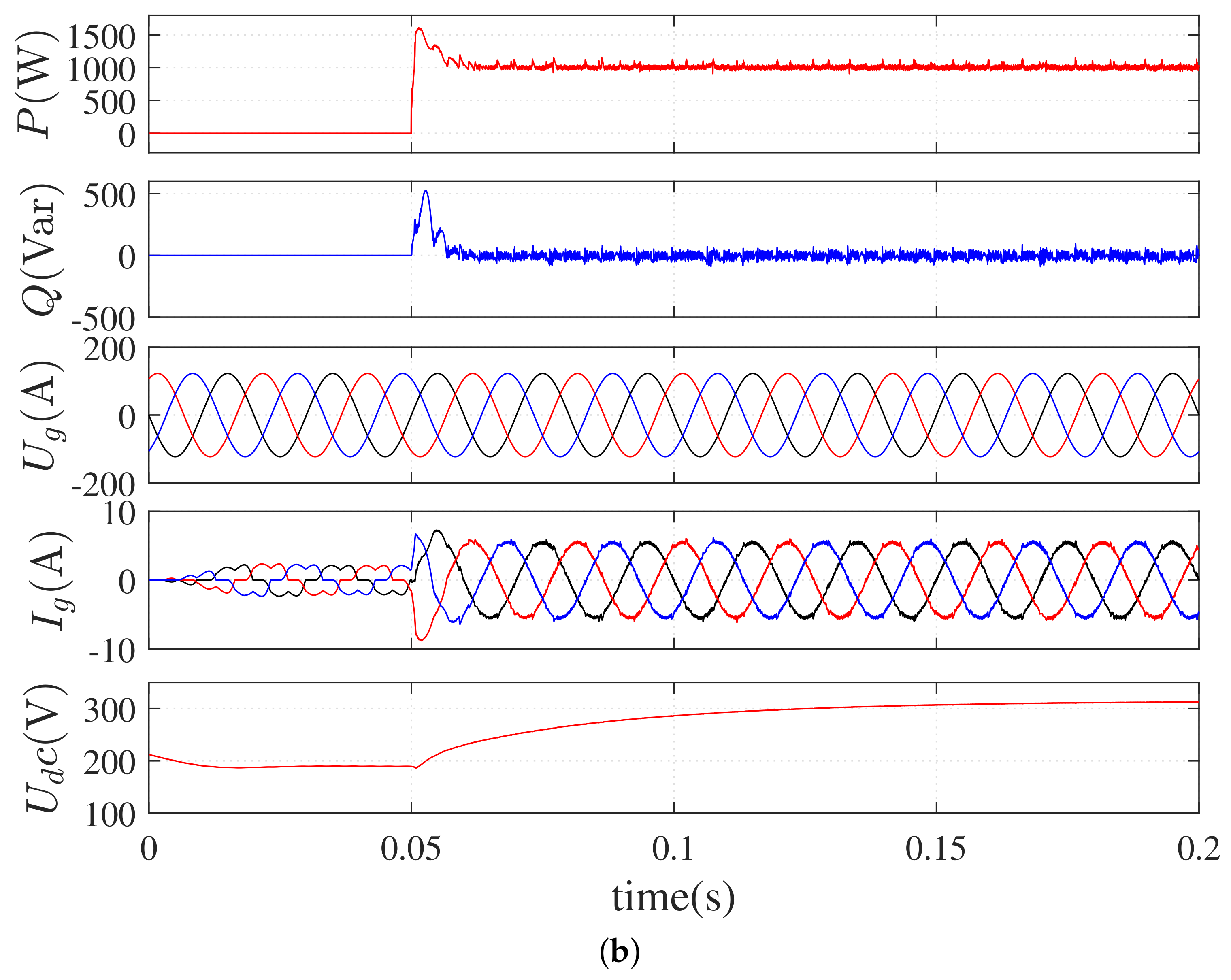
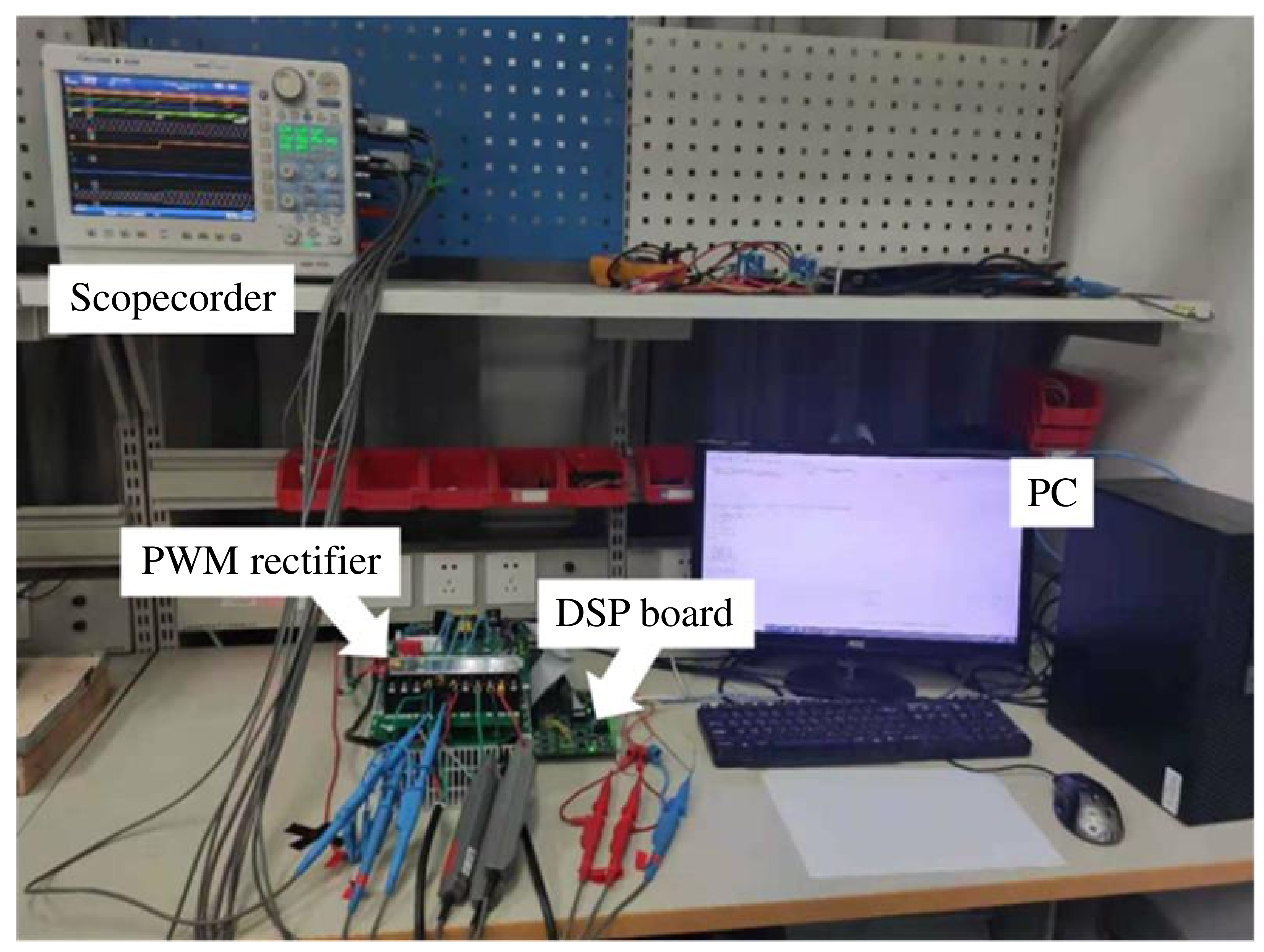
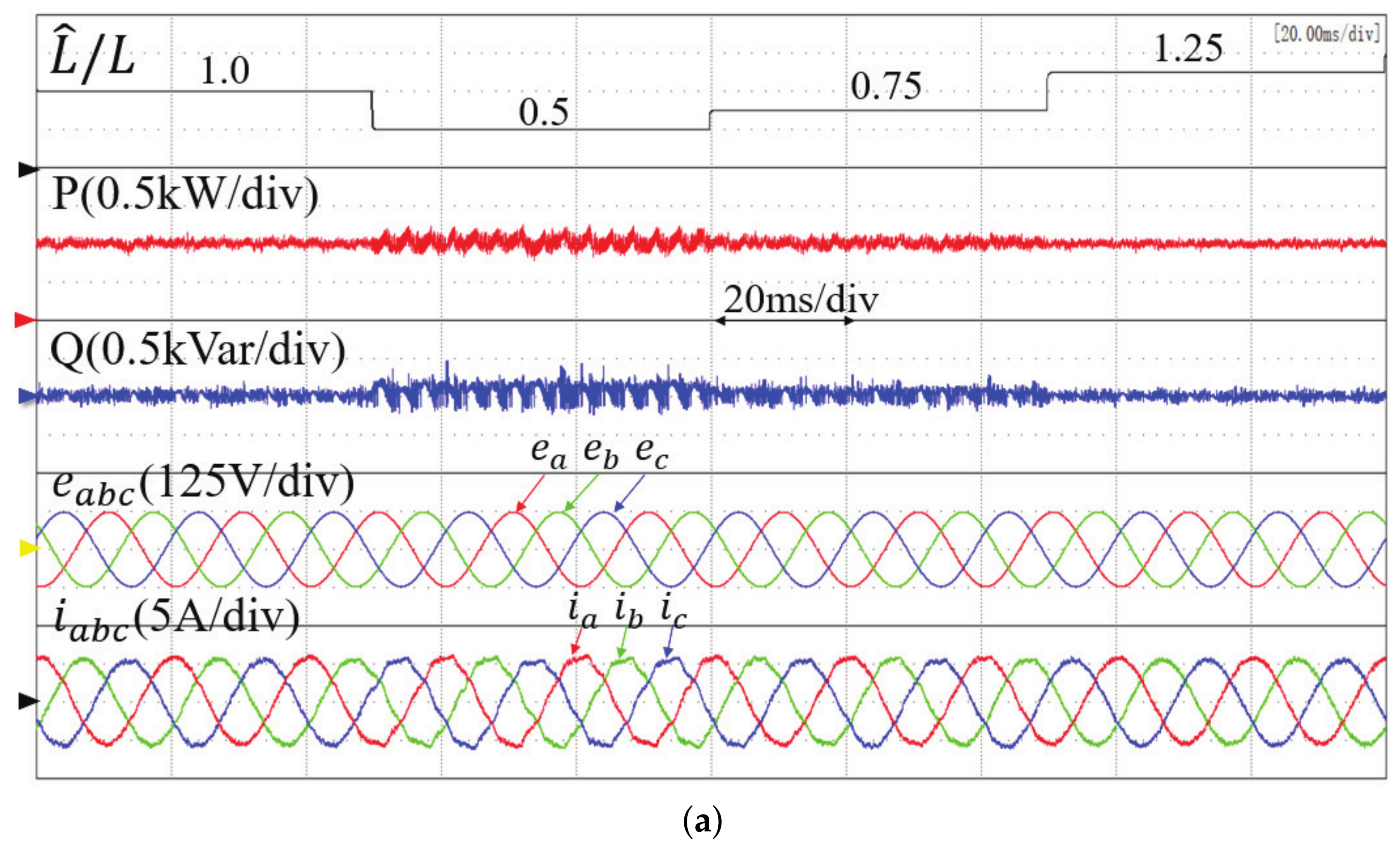
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yan, S.; Yang, Y.; Hui, S.Y.; Blaabjerg, F. A Review on Direct Power Control of Pulsewidth Modulation Converters. IEEE Trans. Power Electron. 2021, 36, 11984–12007. [Google Scholar] [CrossRef]
- Blasko, V.; Kaura, V. A new mathematical model and control of a three-phase AC-DC voltage source converter. IEEE Trans. Power Electron. 1997, 12, 116–123. [Google Scholar] [CrossRef]
- Noguchi, T.; Tomiki, H.; Kondo, S.; Takahashi, I. Direct power control of PWM converter without power-source voltage sensors. IEEE Trans. Ind. Appl. 1998, 34, 473–479. [Google Scholar] [CrossRef]
- Zhang, Y.; Qu, C. Table-Based Direct Power Control for Three-Phase AC/DC Converters Under Unbalanced Grid Voltages. IEEE Trans. Power Electron. 2015, 30, 7090–7099. [Google Scholar] [CrossRef]
- Zhou, D.; Jiang, C.; Quan, Z.; Li, Y.R. Vector Shifted Model Predictive Power Control of Three-Level Neutral-Point-Clamped Rectifiers. IEEE Trans. Ind. Electron. 2020, 67, 7157–7166. [Google Scholar] [CrossRef]
- Zhang, Y.; Qu, C. Model Predictive Direct Power Control of PWM Rectifiers Under Unbalanced Network Conditions. IEEE Trans. Ind. Electron. 2015, 62, 4011–4022. [Google Scholar] [CrossRef]
- Zhang, Y.; Peng, Y.; Qu, C. Model Predictive Control and Direct Power Control for PWM Rectifiers With Active Power Ripple Minimization. IEEE Trans. Ind. Appl. 2016, 52, 4909–4918. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Xia, C.; Wang, M.; Song, Z.; Liu, T. Robust Model Predictive Current Control of Three-Phase Voltage Source PWM Rectifier With Online Disturbance Observation. IEEE Trans. Ind. Informat. 2012, 8, 459–471. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Li, B.; Liu, J. Robust predictive current control of PWM rectifier under unbalanced and distorted network. IET Power Electron. 2021, 14, 797–806. [Google Scholar] [CrossRef]
- Wang, B.; Xu, Y.; Shen, Z.; Zou, J.; Li, C.; Liu, H. Current Control of Grid-Connected Inverter With LCL Filter Based on Extended-State Observer Estimations Using Single Sensor and Achieving Improved Robust Observation Dynamics. IEEE Trans. Ind. Electron. 2017, 64, 5428–5439. [Google Scholar] [CrossRef]
- Silva, J. Sliding-mode control of boost-type unity-power-factor PWM rectifiers. IEEE Trans. Ind. Electron. 1999, 46, 594–603. [Google Scholar] [CrossRef]
- Mehreganfar, M.; Saeedinia, M.H.; Davari, S.A.; Garcia, C.; Rodriguez, J. Sensorless Predictive Control of AFE Rectifier With Robust Adaptive Inductance Estimation. IEEE Trans. Ind. Inform. 2019, 15, 3420–3431. [Google Scholar] [CrossRef]
- Lin, C.K.; Liu, T.H.; Yu, J.t.; Fu, L.C.; Hsiao, C.F. Model-Free Predictive Current Control for Interior Permanent-Magnet Synchronous Motor Drives Based on Current Difference Detection Technique. IEEE Trans. Ind. Electron. 2014, 61, 667–681. [Google Scholar] [CrossRef]
- Lai, Y.S.; Lin, C.K.; Chuang, F.P.; Yu, J.T. Model-free predictive current control for three-phase AC/DC converters. IET Electr. Power Appl. 2017, 11, 729–739. [Google Scholar] [CrossRef]
- Carlet, P.G.; Tinazzi, F.; Bolognani, S.; Zigliotto, M. An Effective Model-Free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Appl. 2019, 55, 3781–3790. [Google Scholar] [CrossRef] [Green Version]
- Le, V.T.; Lee, H.H. An Enhanced Model-Free Predictive Control to Eliminate Stagnant Current Variation Update for PWM Rectifiers. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 6804–6816. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Jin, J.; Huang, L. Model-Free Predictive Current Control of PMSM Drives Based on Extended State Observer Using Ultralocal Model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Rahoui, A.; Bechouche, A.; Seddiki, H.; Ould Abdeslam, D. Virtual Flux Estimation for Sensorless Predictive Control of PWM Rectifiers Under Unbalanced and Distorted Grid Conditions. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1923–1937. [Google Scholar] [CrossRef]
- Song, H.S.; Nam, K. Dual current control scheme for PWM converter under unbalanced input voltage conditions. IEEE Trans. Ind. Electron. 1999, 46, 953–959. [Google Scholar] [CrossRef]
- Eloy-Garcia, J.; Arnaltes, S.; Rodriguez-Amenedo, J. Direct power control of voltage source inverters with unbalanced grid voltages. IET Power Electron. 2008, 1, 395–407. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiao, J.; Xu, D.; Jiang, D.; Wang, Z.; Tong, C. Model Predictive Direct Power Control of Doubly Fed Induction Generators Under Balanced and Unbalanced Network Conditions. IEEE Trans. Ind. Appl. 2020, 56, 771–786. [Google Scholar] [CrossRef]
- Holtz, J. The representation of AC machine dynamics by complex signal flow graphs. IEEE Trans. Ind. Electron. 1995, 42, 263–271. [Google Scholar] [CrossRef] [Green Version]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous Reactive Power Compensators Comprising Switching Devices without Energy Storage Components. IEEE Trans. Ind. Appl. 1984, 20, 625–630. [Google Scholar] [CrossRef]
- Abad, G.; Rodriguez, M.A.; Iwanski, G.; Poza, J. Direct Power Control of Doubly-Fed-Induction-Generator-Based Wind Turbines Under Unbalanced Grid Voltage. IEEE Trans. Power Electron. 2010, 25, 442–452. [Google Scholar] [CrossRef]
- Liu, H.; Hu, H.; Chen, H.; Zhang, L.; Xing, Y. Fast and Flexible Selective Harmonic Extraction Methods Based on the Generalized Discrete Fourier Transform. IEEE Trans. Power Electron. 2018, 33, 3484–3496. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
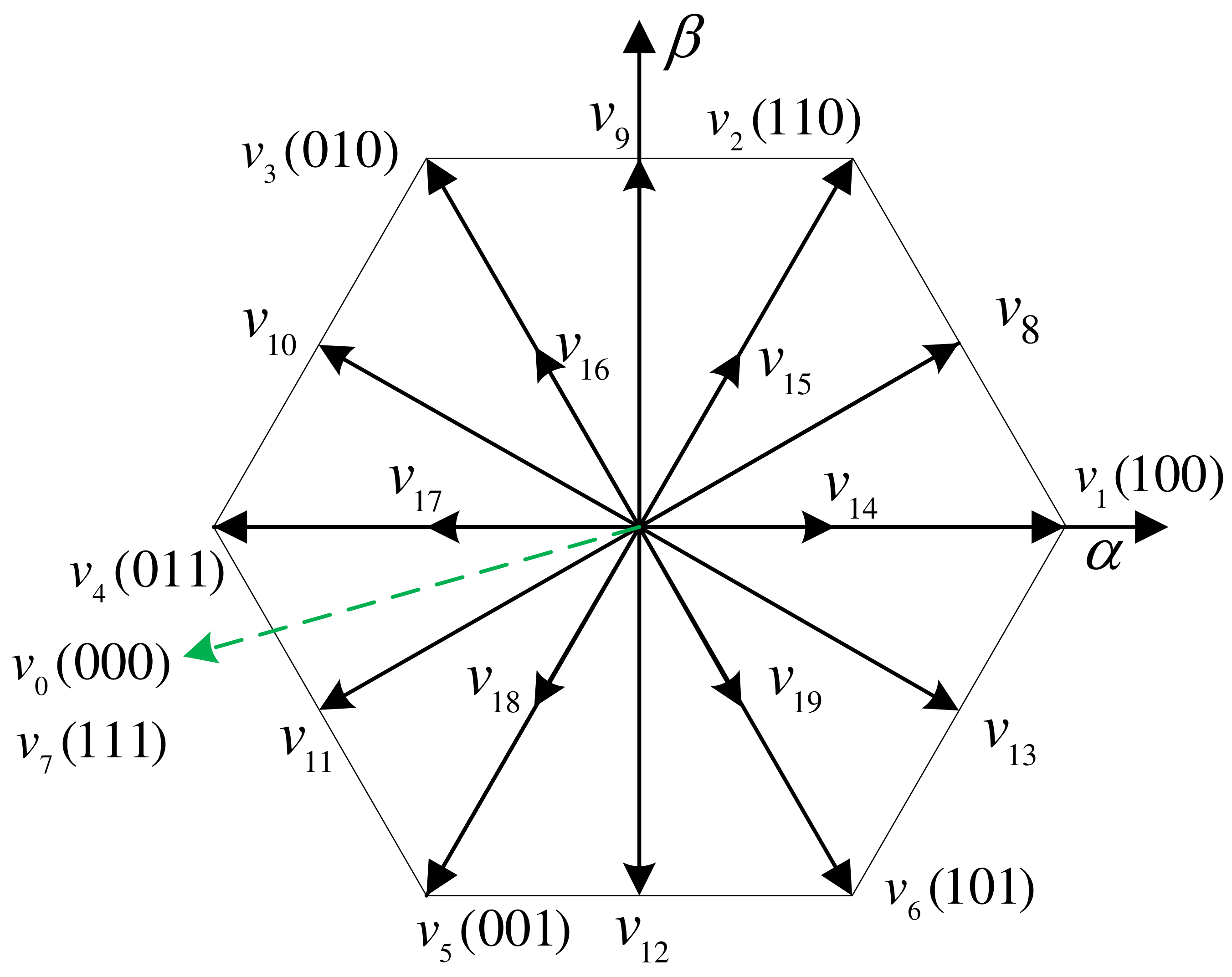
| Vector No. | Complex Vectors |
|---|---|
| 0 | |
| Control Target | Power Compensation Value |
|---|---|
| Target I | |
| Target II | |
| Target III |
| System Parameter | Symbol | Value |
|---|---|---|
| Line resistance | 0.3 | |
| Line inductance | 10 mH | |
| DC-side capacitance | C | 840 F |
| Load resistance | 100 | |
| Line–line voltage | 150 V | |
| Line voltage frequency | f | 50 Hz |
| DC-side voltage | 300 V | |
| Sampling frequency | 20 kHz |
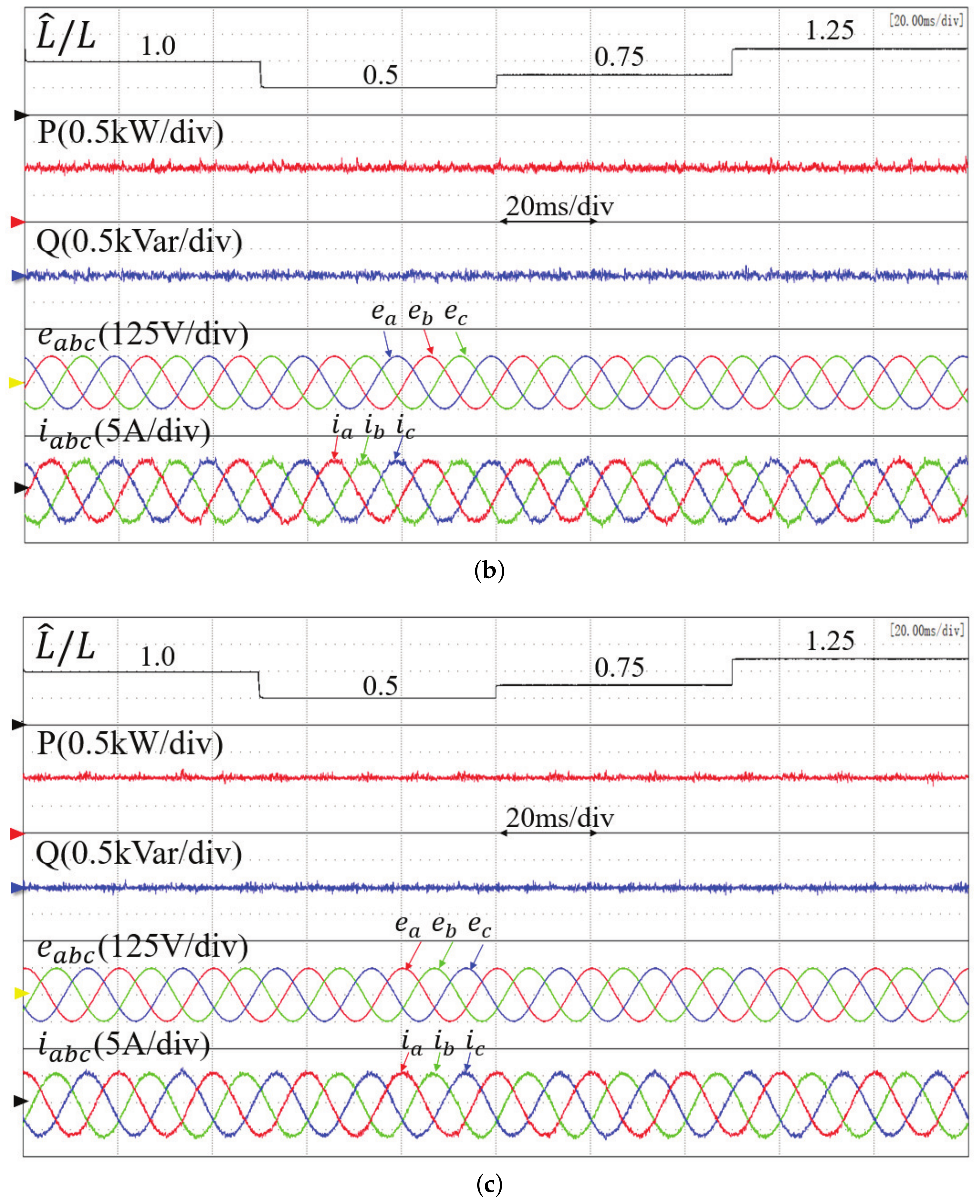
| Method | THD of i | |
|---|---|---|
| 0.5 L | Conventional MPPC | 6.51% |
| Proposed basic MFPPC | 6.82% | |
| Proposed improved MFPPC | 3.89% | |
| 0.75 L | Conventional MPPC | 5.09% |
| Proposed basic MFPPC | 6.85% | |
| Proposed improved MFPPC | 3.95% | |
| 1.25 L | Conventional MPPC | 5.34% |
| Proposed basic MFPPC | 6.91% | |
| Proposed improved MFPPC | 4.02% |
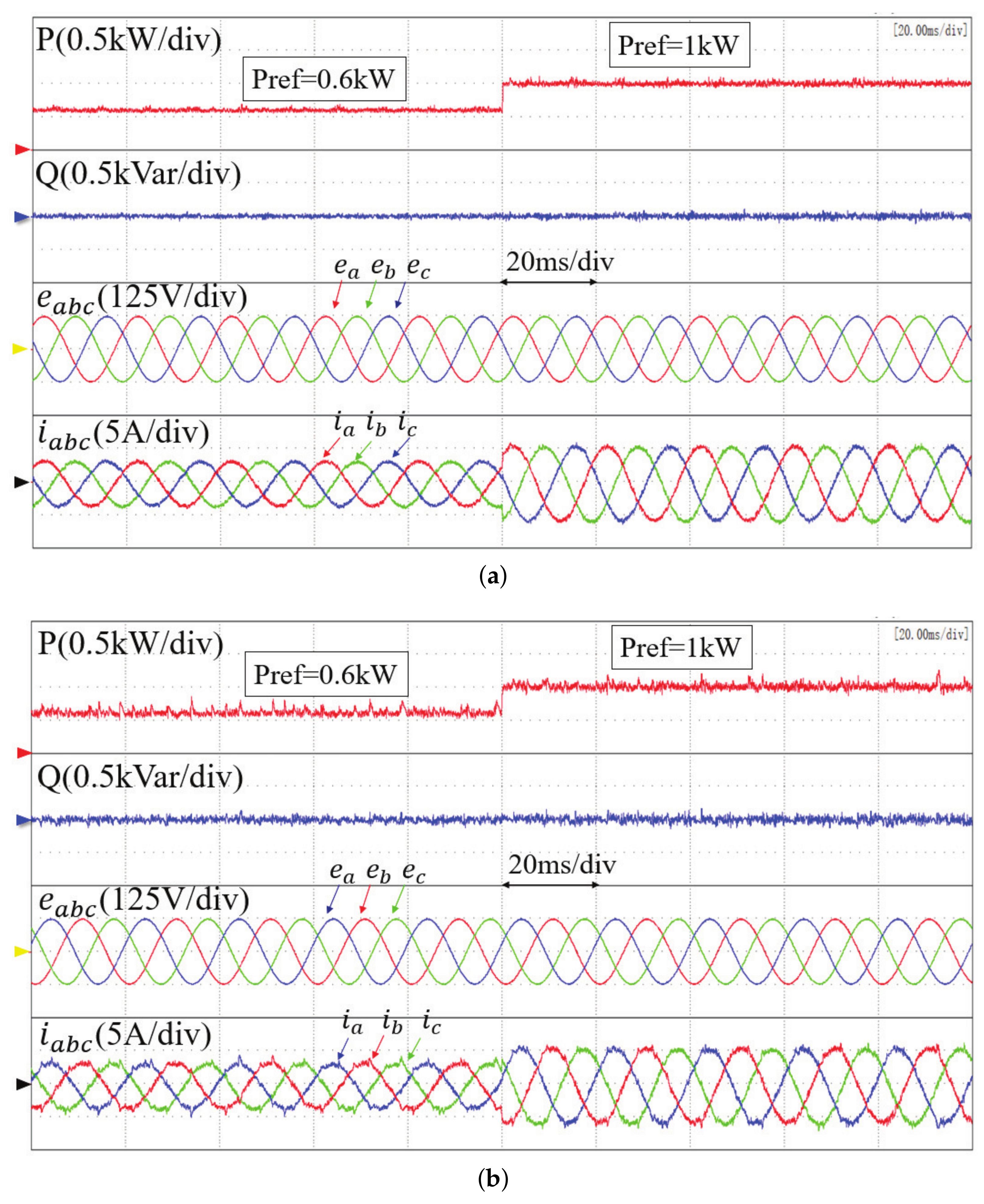
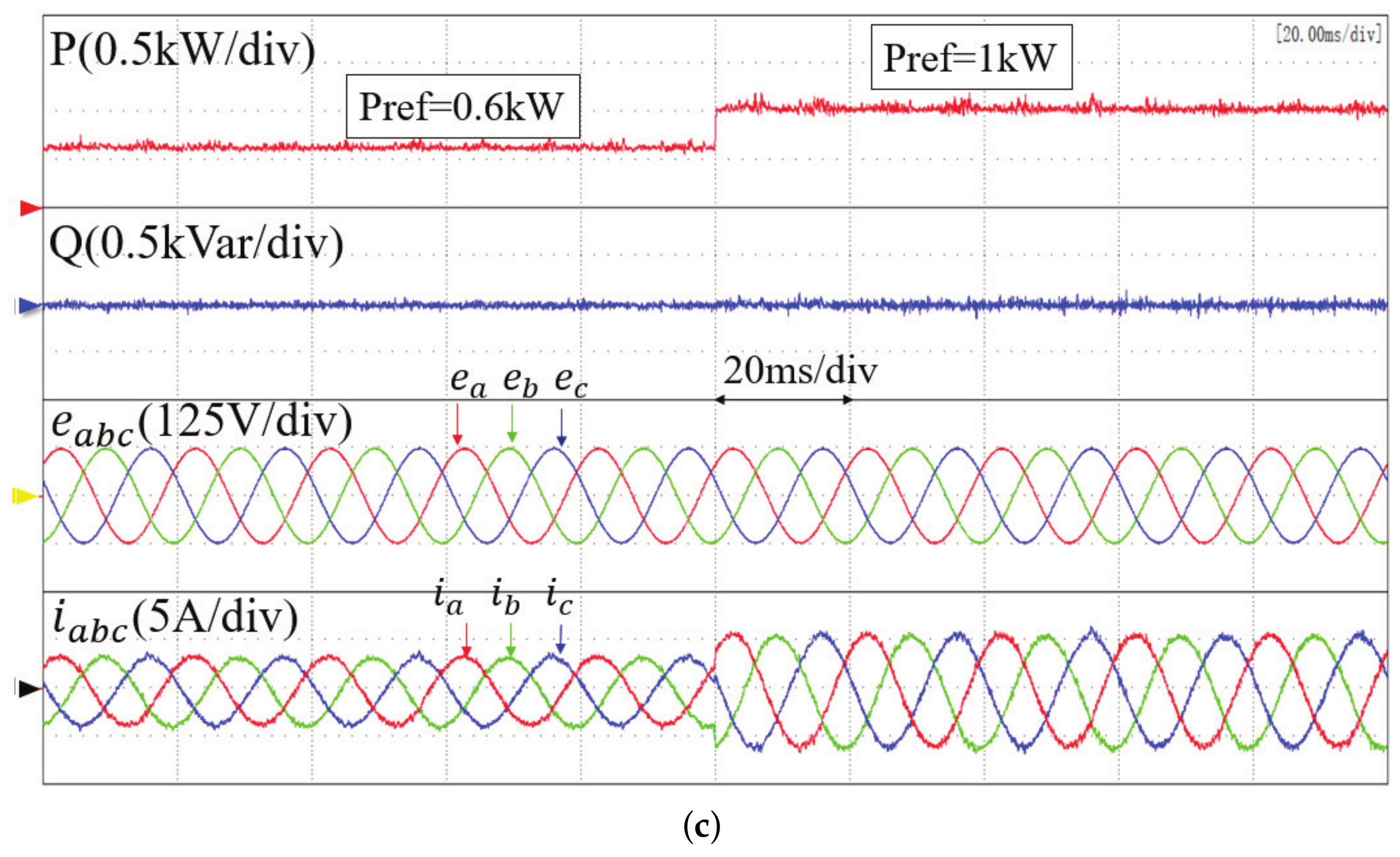
| Method | THD of i | |
|---|---|---|
| Conventional MPPC | 5.38% | |
| 600 W | Proposed basic MFPPC | 10.27% |
| Proposed improved MFPPC | 5.13% | |
| Conventional MPPC | 4.17% | |
| 1000 W | Proposed basic MFPPC | 6.77% |
| Proposed improved MFPPC | 4.07% |
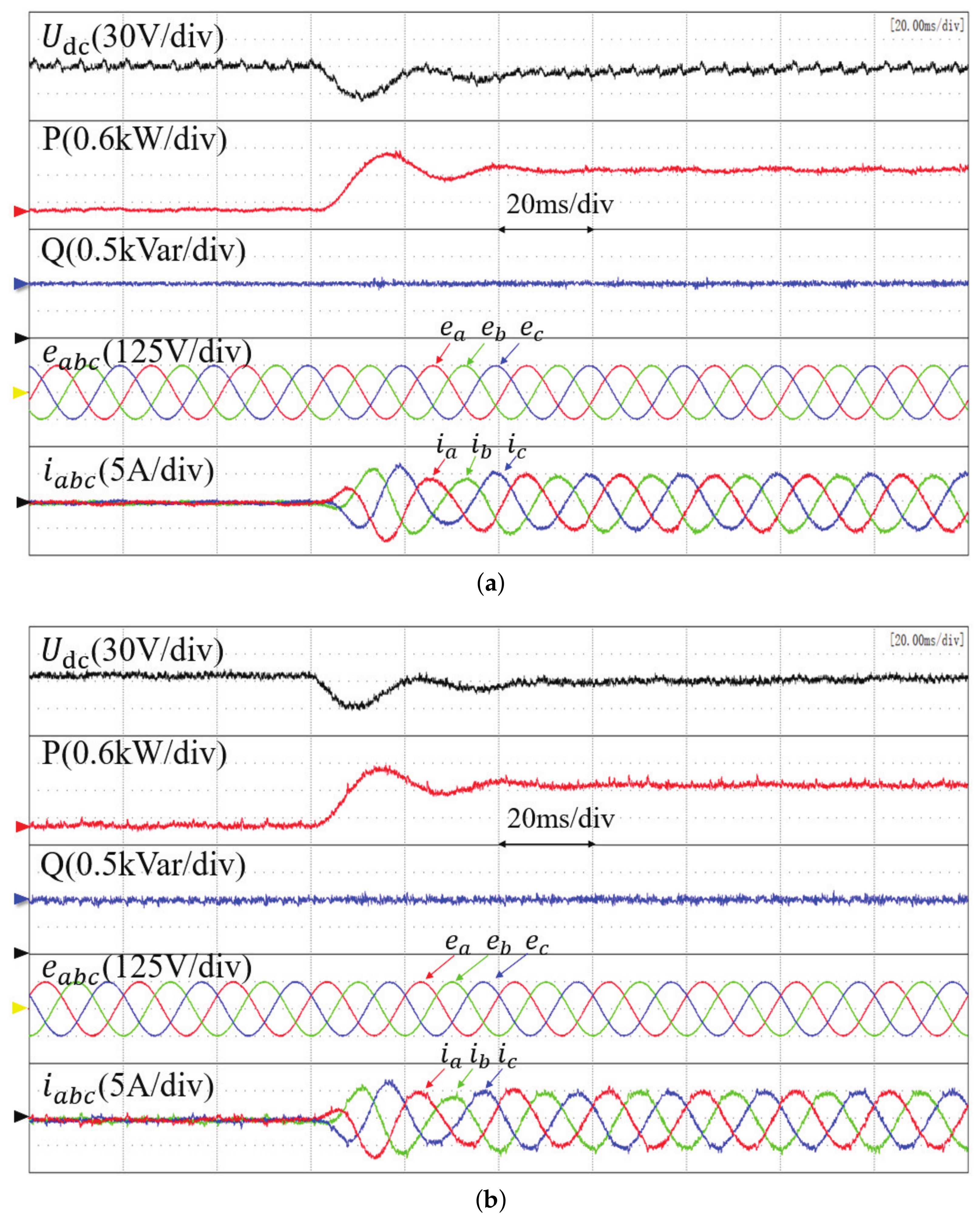
| Method | THD of i | ||
|---|---|---|---|
| Conventional MPPC | 4.29% | 4.08% | 4.31% |
| Proposed basic MFPPC | 6.76% | 6.23% | 6.65% |
| Proposed improved MFPPC | 4.22% | 3.66% | 4.67% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Qu, Q.; Zhang, Y.; Min, Z. Model-Free Predictive Power Control for PWM Rectifiers under Asymmetrical Grids. Symmetry 2022, 14, 1224. https://doi.org/10.3390/sym14061224
Wang Z, Qu Q, Zhang Y, Min Z. Model-Free Predictive Power Control for PWM Rectifiers under Asymmetrical Grids. Symmetry. 2022; 14(6):1224. https://doi.org/10.3390/sym14061224
Chicago/Turabian StyleWang, Zeting, Qiyan Qu, Yongchang Zhang, and Zeyu Min. 2022. "Model-Free Predictive Power Control for PWM Rectifiers under Asymmetrical Grids" Symmetry 14, no. 6: 1224. https://doi.org/10.3390/sym14061224