
Identification of Abnormal Vibration Signal of Subway Track Bed Based on Ultra-Weak FBG Sensing Array Combined with Unsupervised Learning Network


(This article belongs to the Section Engineering and Materials)
Abstract
:1. Introduction
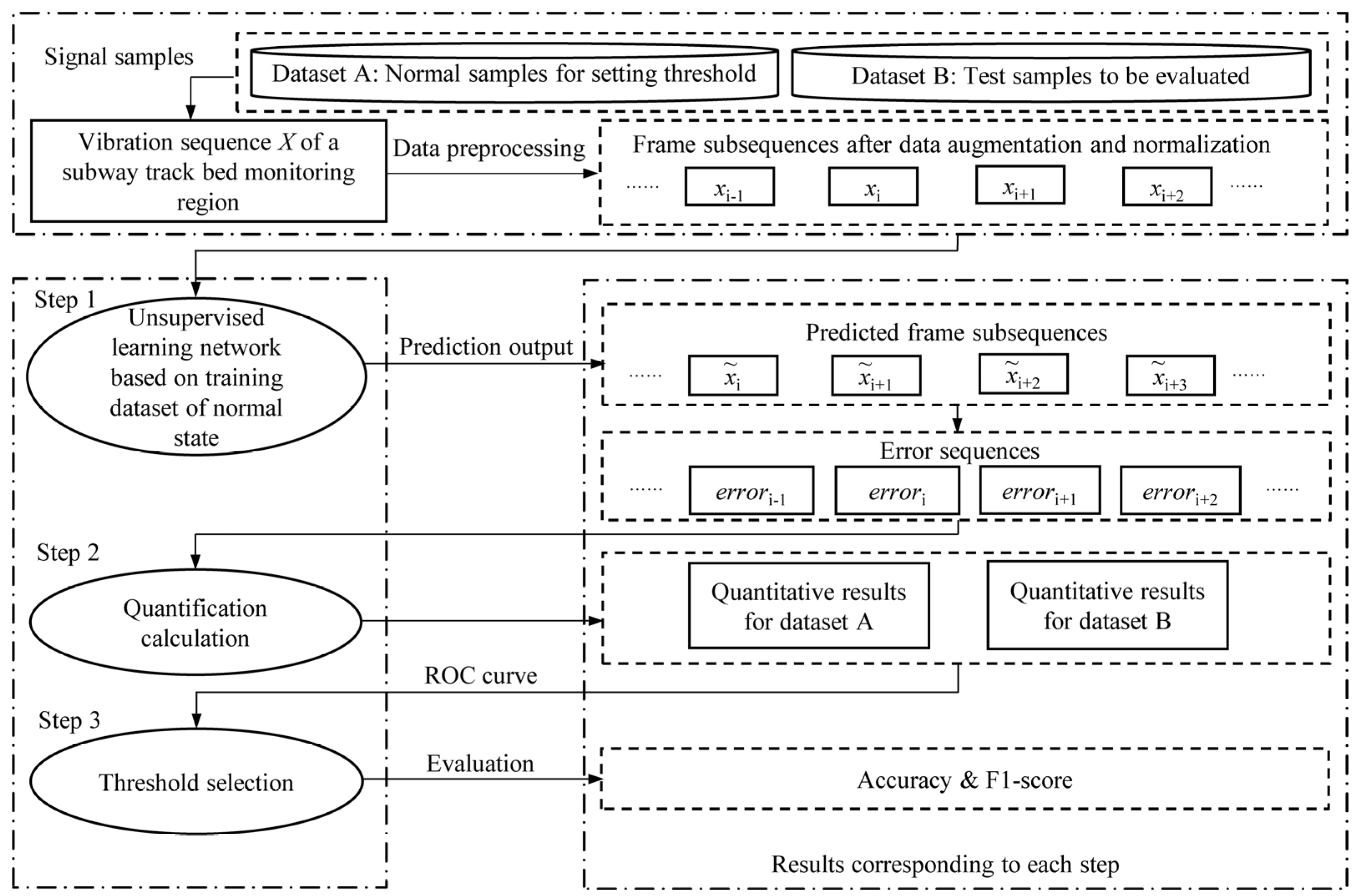
2. Procedure for Abnormal Signal Identification
3. Design and Arrangement of the Experiment
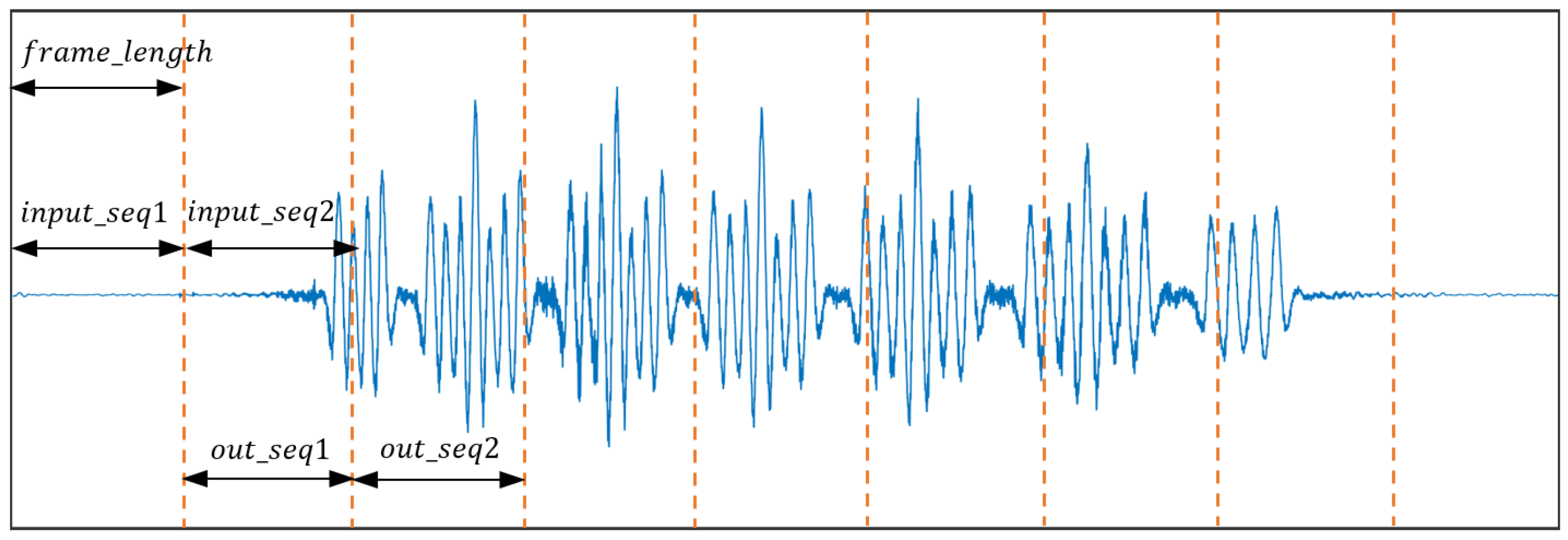
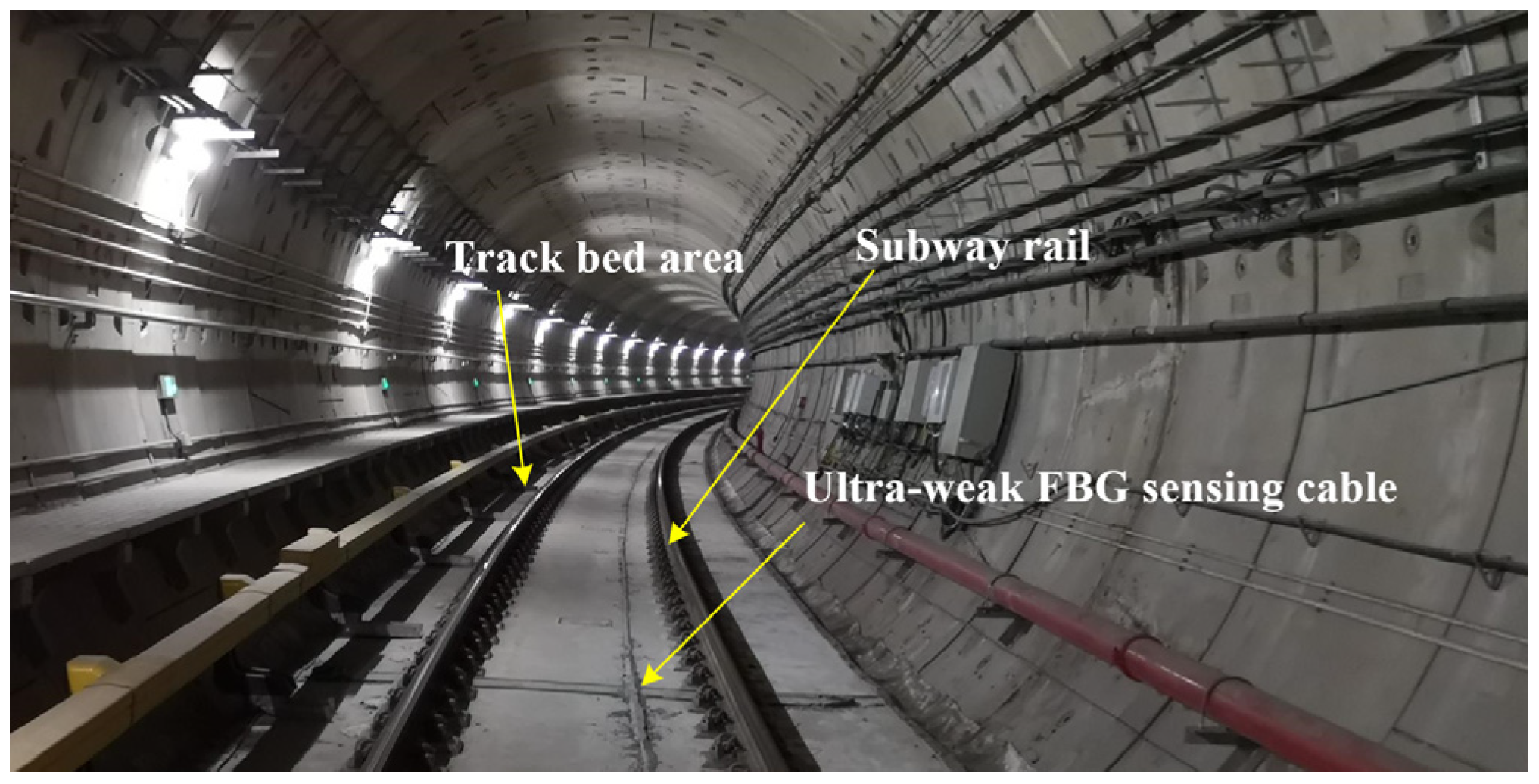
3.1. Vibration Signal Acquisition of Subway Track Bed
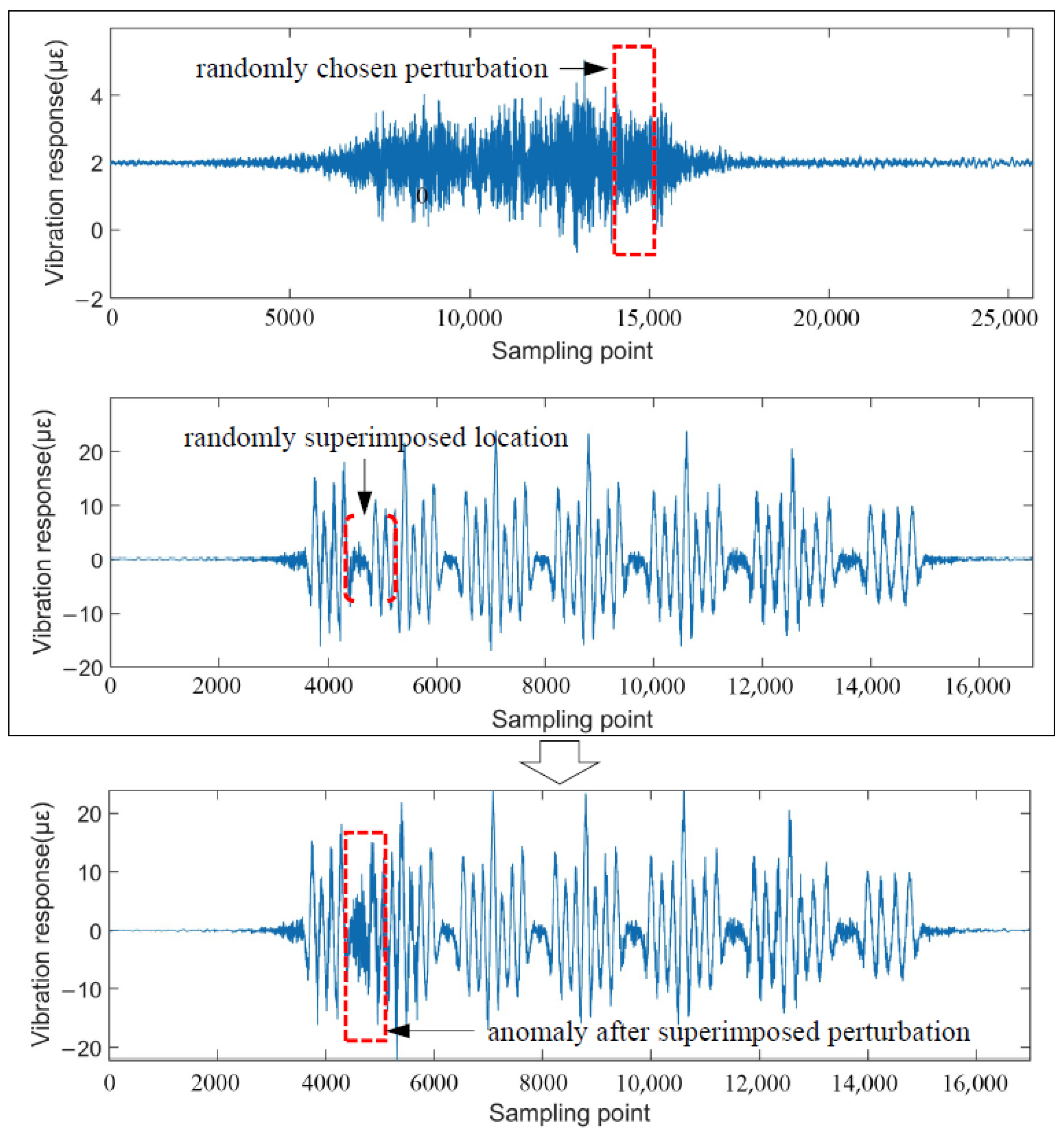
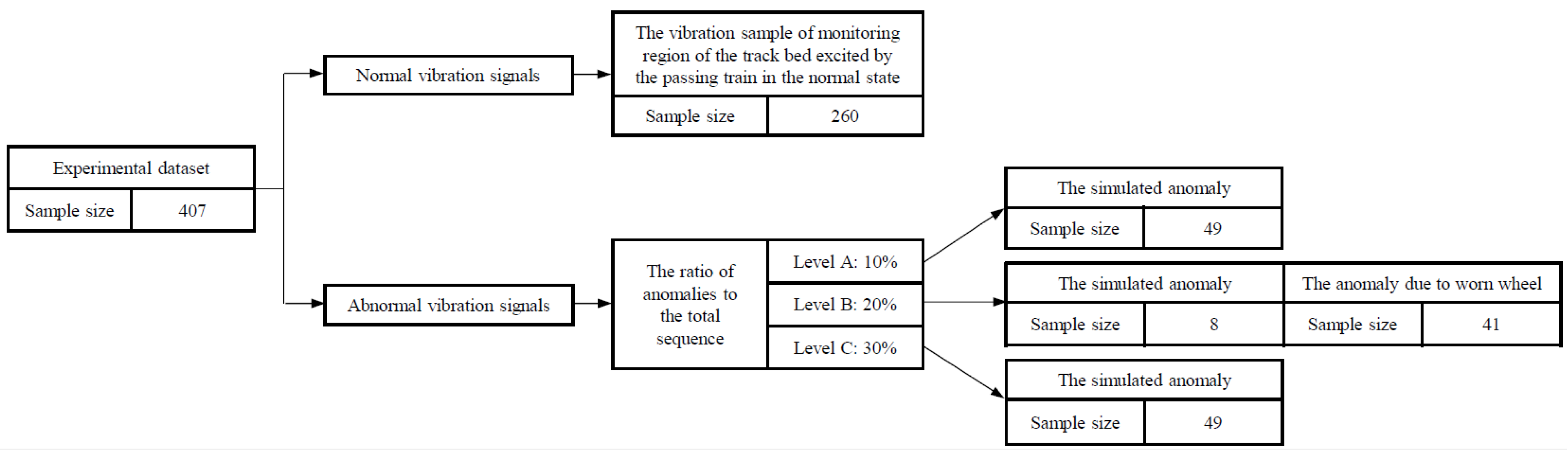
3.2. Composition and Division of the Experimental Dataset
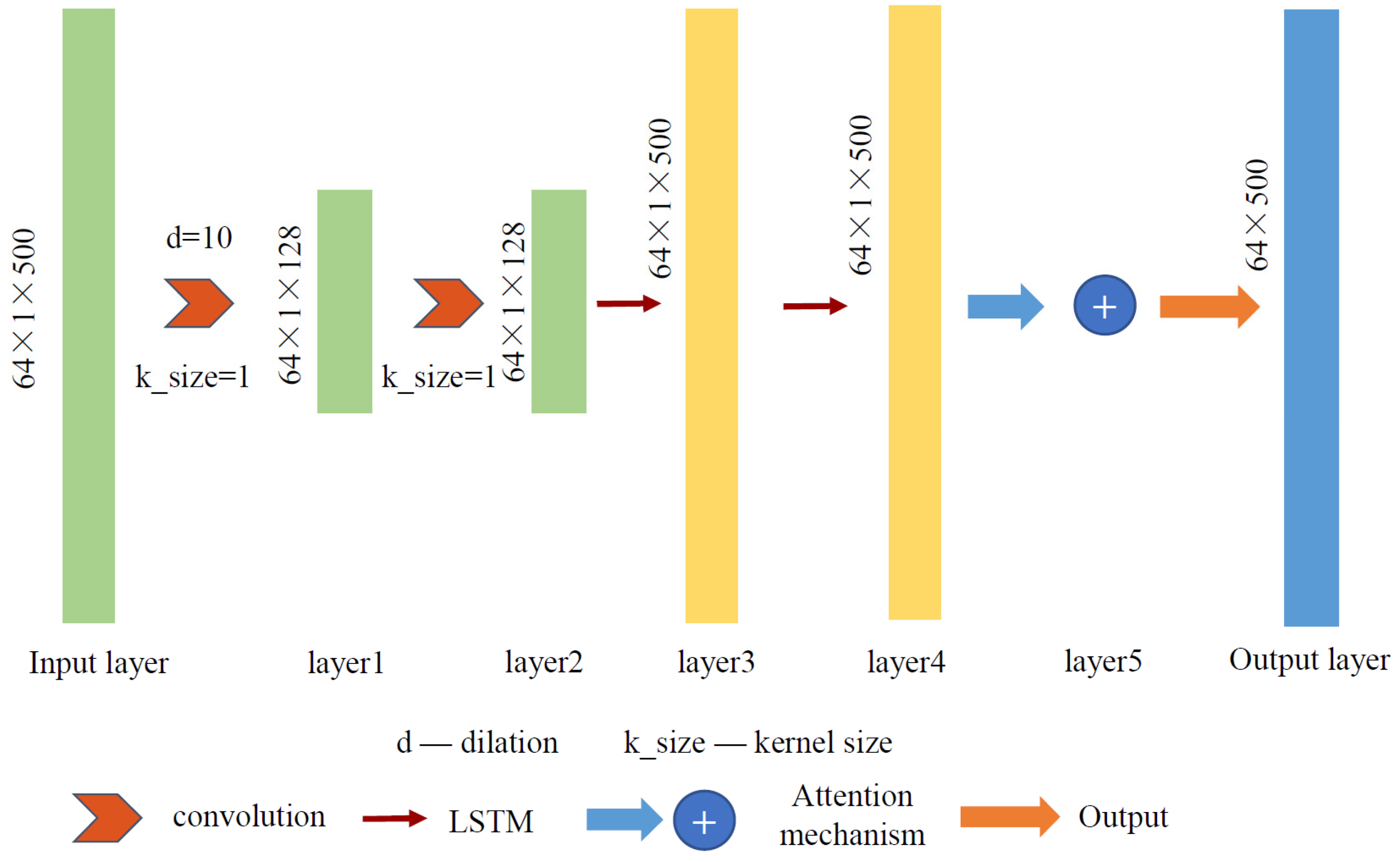
3.3. Establishment of the Unsupervised Learning Network
4. Results and Discussion
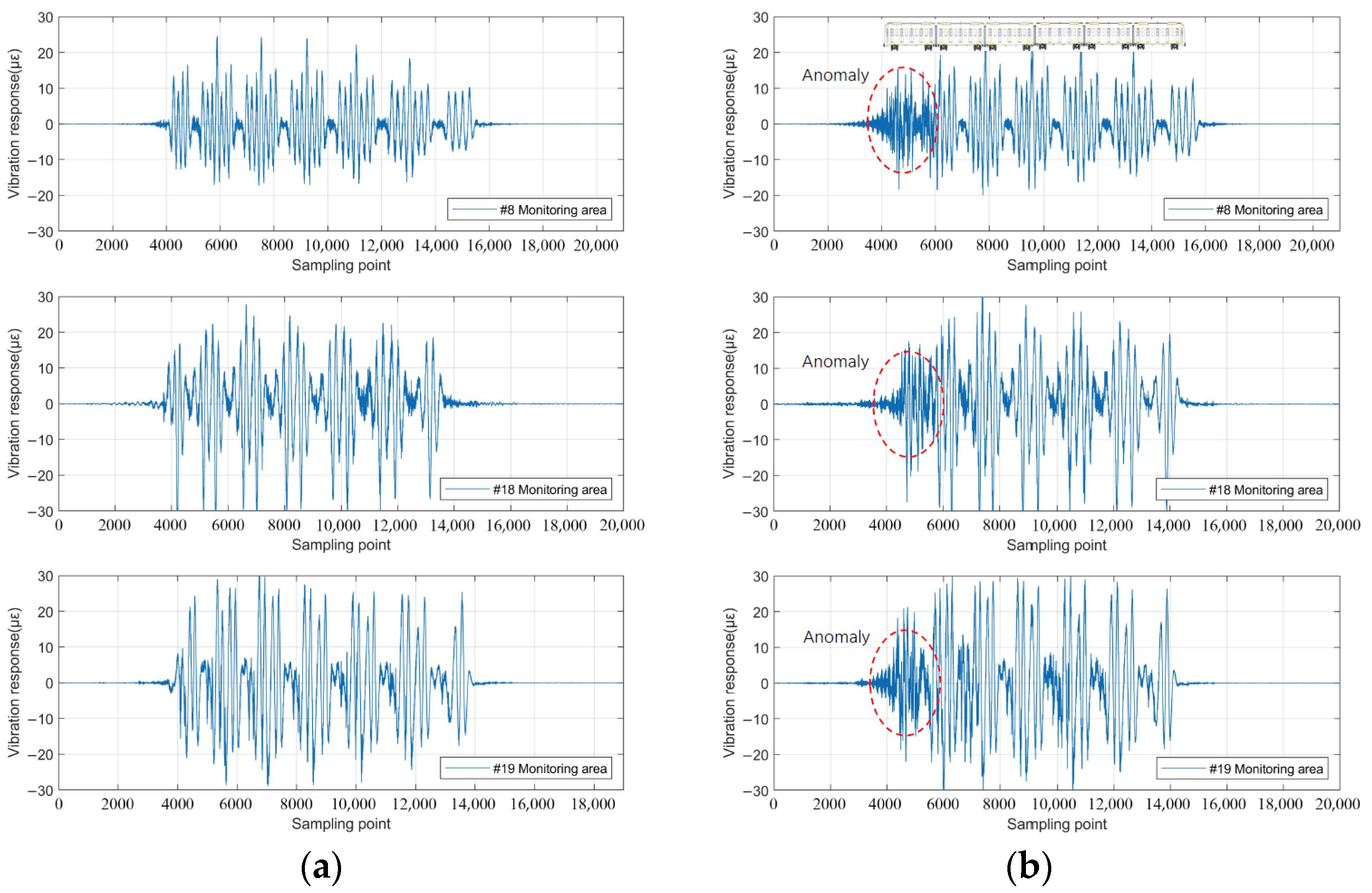
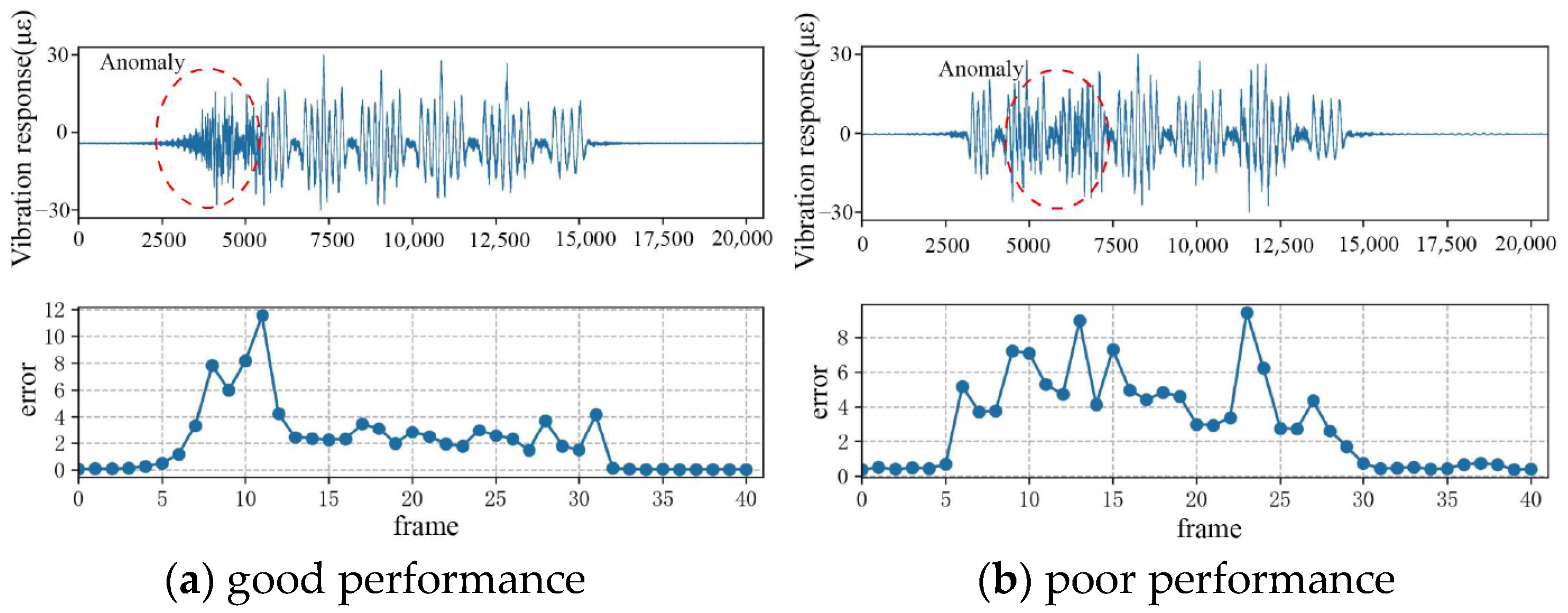
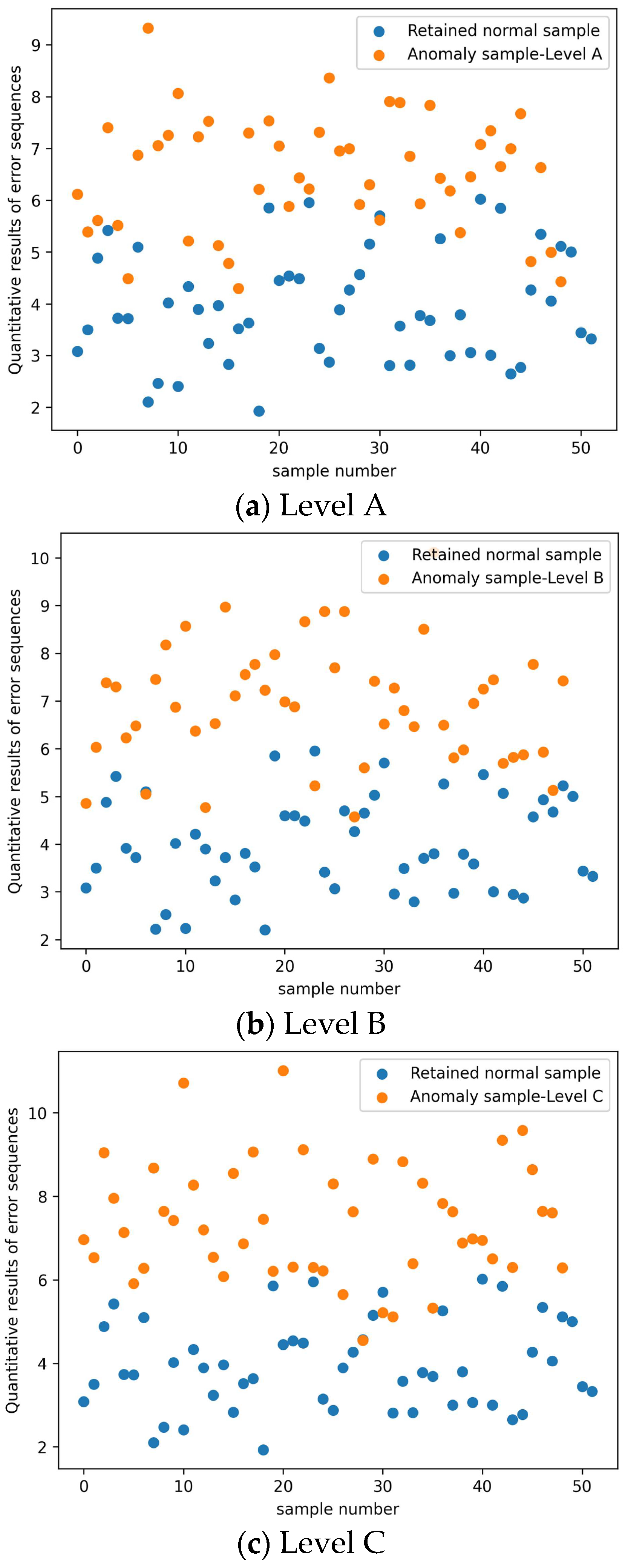
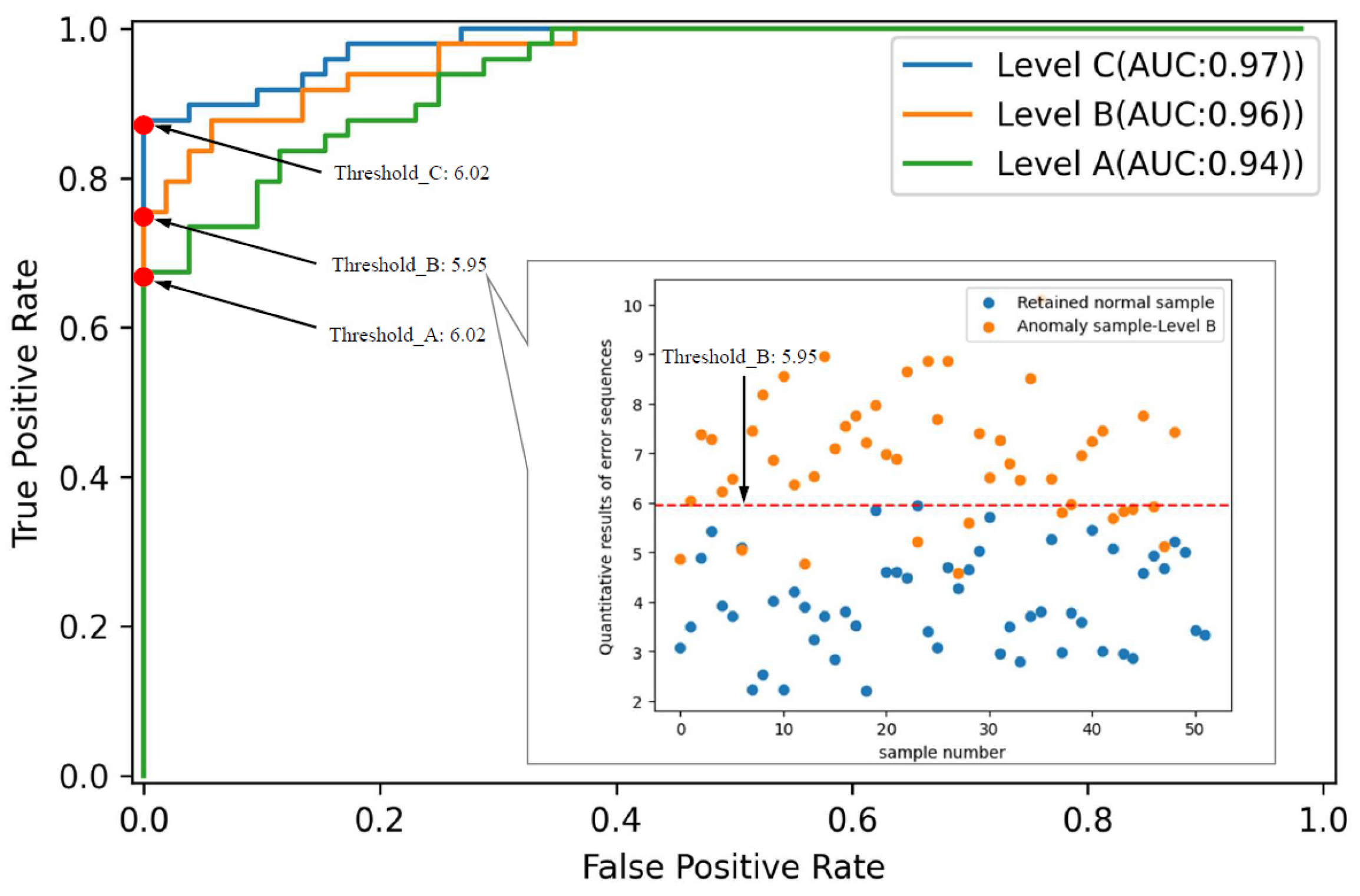
4.1. Result Analysis
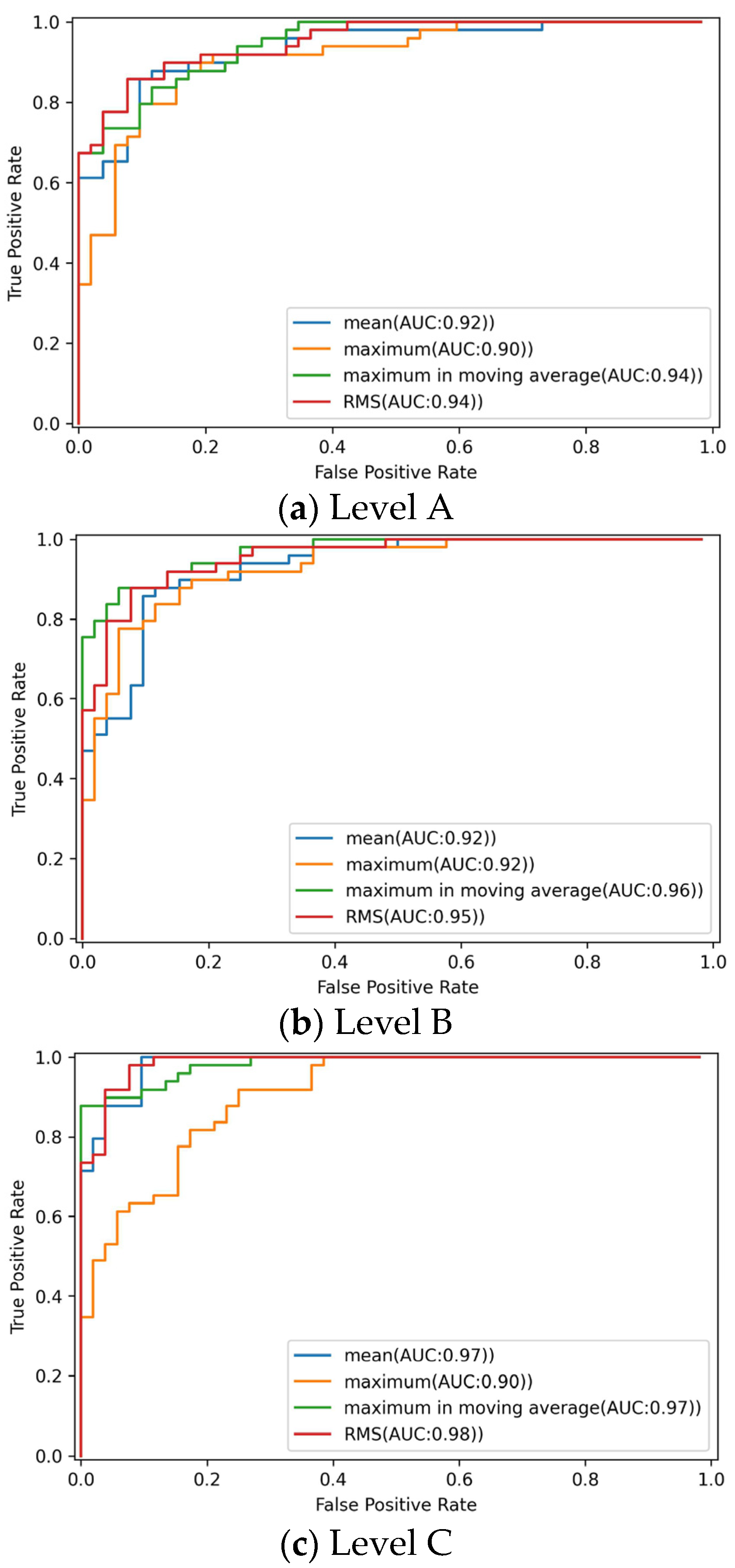
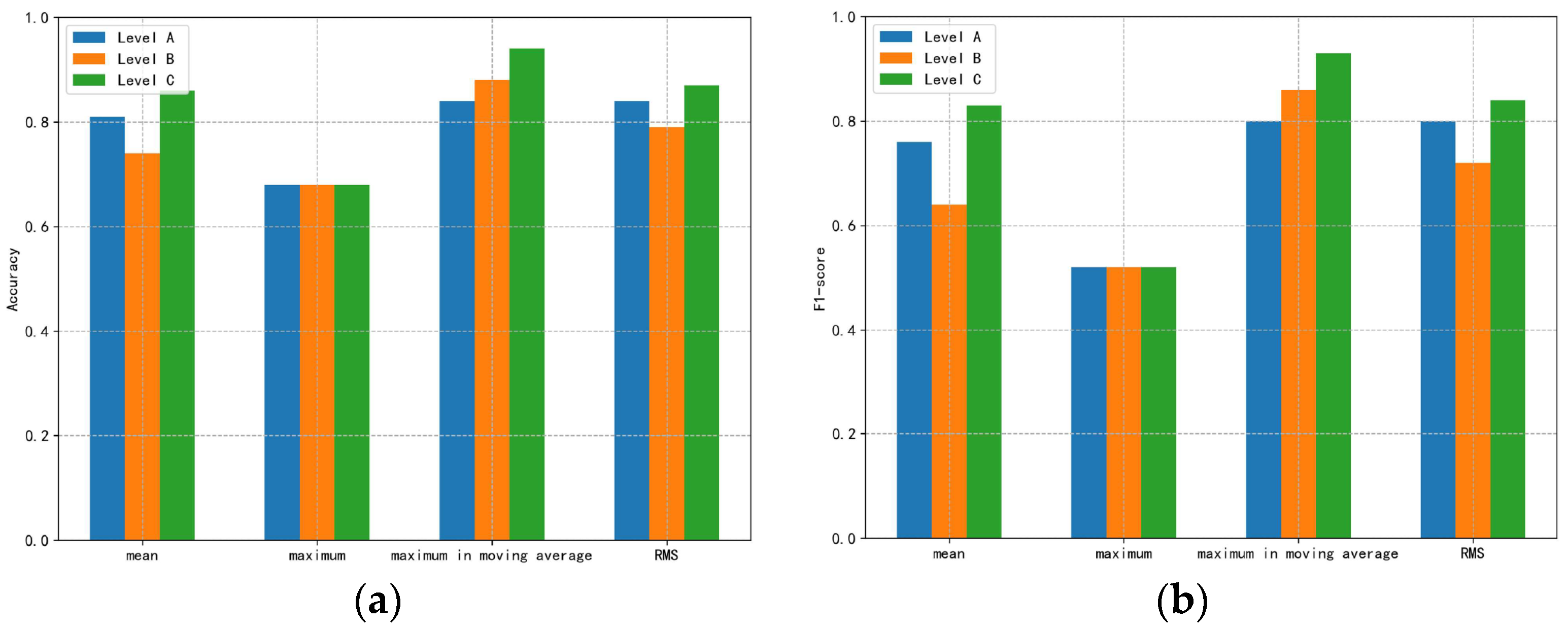
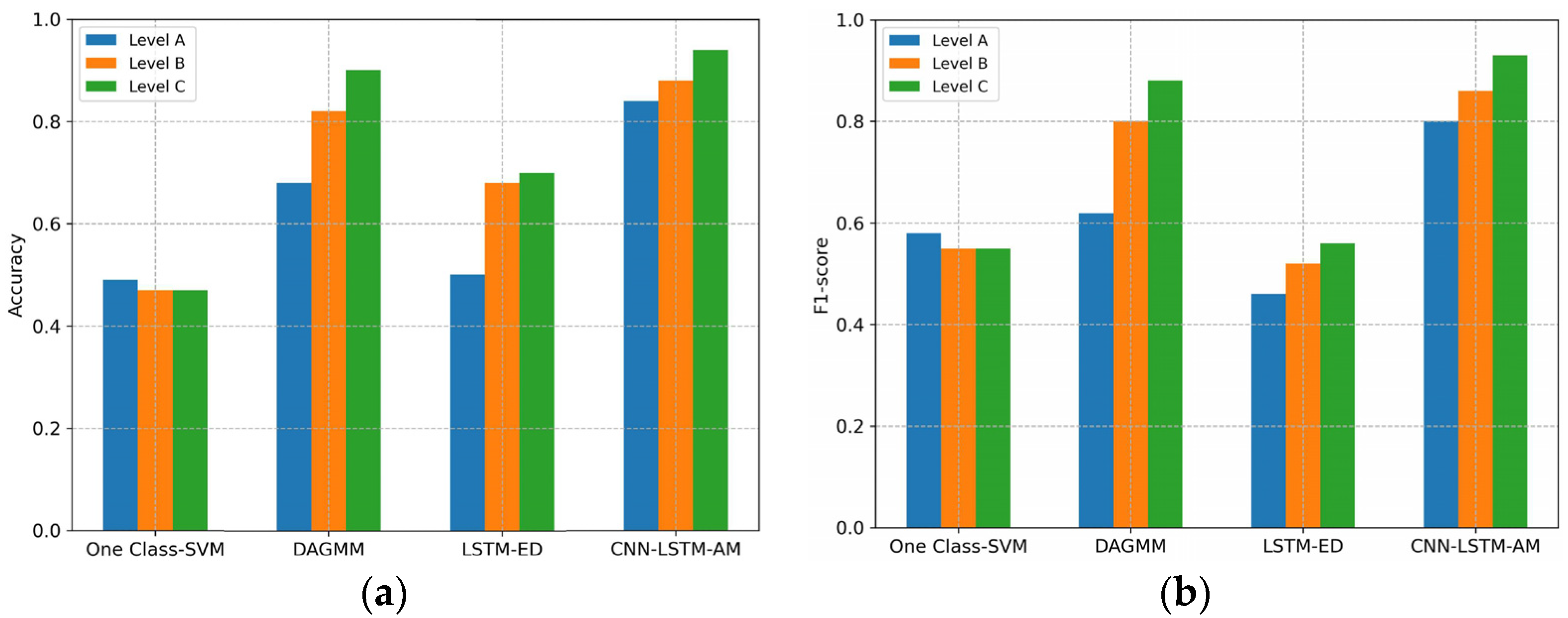
4.2. Discussion Based on Comparative Testing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kaewunruen, S.; Osman, M.H.; Hao Cheng Eric, W. Risk-based maintenance planning for rail fastening systems. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2019, 5, 04019007. [Google Scholar] [CrossRef] [Green Version]
- Poudel, A.; Lindeman, B.; Wilson, R. Current practices of rail inspection using ultrasonic methods: A review. Mater. Eval. 2019, 77, 871–883. [Google Scholar]
- Alvarenga, T.A.; Carvalho, A.L.; Honorio, L.M.; Cerqueira, A.S.; Filho, L.M.A.; Nobrega, R.A. Detection and classification system for rail surface defects based on eddy current. Sensors 2021, 21, 7937. [Google Scholar] [CrossRef] [PubMed]
- Kim, J. Non-destructive characterization of railway materials and components with infrared thermography technique. Materials 2019, 12, 4077. [Google Scholar] [CrossRef] [Green Version]
- Lou, Y.; Zhang, T.; Tang, J.; Song, W.; Zhang, Y.; Chen, L. A fast algorithm for rail extraction using mobile laser scanning data. Remote Sens. 2018, 10, 1998. [Google Scholar] [CrossRef] [Green Version]
- Gibert, X.; Patel, V.M.; Chellappa, R. Deep multitask learning for railway track inspection. IEEE Trans. Intell. Transp. Syst. 2017, 18, 153–164. [Google Scholar] [CrossRef] [Green Version]
- James, A.; Jie, W.; Xulei, Y.; Chenghao, Y.; Ngan, N.B.; Yuxin, L.; Yi, S.; Chandrasekhar, V.; Zeng, Z. TrackNet—A deep learning based fault detection for railway track inspection. In Proceedings of the 2018 International Conference on Intelligent Rail Transportation, ICIRT 2018, Singapore, 12–14 December 2018. [Google Scholar]
- Li, S.; Zuo, X.; Li, Z.; Wang, H.; Sun, L. Combining SDAE network with improved DTW algorithm for similarity measure of ultra-weak FBG vibration responses in underground structures. Sensors 2020, 20, 2179. [Google Scholar] [CrossRef] [Green Version]
- Gan, W.; Li, S.; Li, Z.; Sun, L. Identification of ground intrusion in underground structures based on distributed structural vibration detected by ultra-weak FBG sensing technology. Sensors 2019, 19, 2160. [Google Scholar] [CrossRef] [Green Version]
- Nan, Q.; Li, S.; Yao, Y.; Li, Z.; Wang, H.; Wang, L.; Sun, L. A novel monitoring approach for train tracking and incursion detection in underground structures based on ultra-weak FBG sensing array. Sensors 2019, 19, 2666. [Google Scholar] [CrossRef] [Green Version]
- Tao, L.; Siqi, Q.; Zhang, Y.; Shi, H. Abnormal detection of wind turbine based on SCADA data mining. Math. Probl. Eng. 2019, 2019, 5976843. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Jing, L.; Li, S. Bridge anomaly data identification method based on statistical feature mixture and data augmentation through forwarding difference. In Proceedings of the 2021 3rd International Conference on Advances in Civil Engineering, Energy Resources and Environment Engineering, Qingdao, China, 28–30 May 2021. [Google Scholar]
- Li, S.; Sun, L. Detectability of bridge-structural damage based on fiber-optic sensing through deep-convolutional neural networks. J. Bridge Eng. 2020, 25, 04020012. [Google Scholar] [CrossRef]
- Tang, Z.; Chen, Z.; Bao, Y.; Li, H. Convolutional neural network-based data anomaly detection method using multiple information for structural health monitoring. J. Struct. Control Health Monit. 2019, 26, e2296. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Wang, Y.; Wang, K. A deep learning driven method for fault classification and degradation assessment in mechanical equipment. Comput. Ind. 2019, 104, 1–10. [Google Scholar] [CrossRef]
- Abid, F.B.; Sallem, M.; Braham, A. Robust interpretable deep learning for intelligent fault diagnosis of induction motors. IEEE Trans. Instrum. Meas. 2019, 69, 3506–3515. [Google Scholar] [CrossRef]
- Hautamäki, V.; Kärkkäinen, I.; Fränti, P. Outlier detection using k-nearest neighbour graph. In Proceedings of the 17th International Conference on Pattern Recognition, ICPR 2004, Cambridge, UK, 23–26 August 2004. [Google Scholar]
- He, Z.; Xu, X.; Deng, S. Discovering cluster-based local outliers. Pattern Recogn. Lett. 2003, 24, 1641–1650. [Google Scholar] [CrossRef]
- Li, J.; Izakian, H.; Pedrycz, W.; Jamal, I. Clustering-based anomaly detection in multivariate time series data. Appl. Soft. Comput. 2021, 100, 106919. [Google Scholar] [CrossRef]
- Saari, J.; Strömbergsson, D.; Lundberg, J.; Thomson, A. Detection and identification of windmill bearing faults using a one-class support vector machine (SVM). Meas. J. Int. Meas. Confed. 2019, 137, 287–301. [Google Scholar] [CrossRef]
- Zong, B.; Song, Q.; Min, M.R.; Cheng, W.; Lumezanu, C.; Cho, D.; Chen, H. Deep autoencoding Gaussian mixture model for unsupervised anomaly detection. In Proceedings of the 6th International Conference on Learning Representations, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Purohit, H.; Tanabe, R.; Endo, T.; Suefusa, K.; Nikaido, Y.; Kawaguchi, Y. Deep Autoencoding Gmm-Based Unsupervised Anomaly Detection In Acoustic Signals And Its Hyperparameter Optimization. arXiv 2009, arXiv:2009.12042. Available online: https://arxiv.org/abs/2009.12042 (accessed on 20 May 2022).
- Pei, J.; Zhong, K.; Jan, M.A.; Li, J. Personalized federated learning framework for network traffic anomaly detection. Comput. Netw. 2022, 209, 108906. [Google Scholar] [CrossRef]
- Malhotra, P.; Ramakrishnan, A.; Anand, G.; Vig, L.; Agarwal, P.; Shroff, G. LSTM-based encoder-decoder for multi-sensor anomaly detection. arXiv 2016, arXiv:1607.00148. Available online: https://arxiv.org/abs/1607.00148 (accessed on 8 May 2022).
- Taylor, A.; Leblanc, S.; Japkowicz, N. Anomaly detection in automobile control network data with long short-term memory networks. In Proceedings of the 3rd IEEE International Conference on Data Science and Advanced Analytics, DSAA 2016, Montreal, PQ, Canada, 17–19 October 2016. [Google Scholar]
- Luo, Z.; Wen, H.; Guo, H.; Yang, M. A time-and wavelength-division multiplexing sensor network with ultra-weak fiber Bragg gratings. Opt. Express 2013, 21, 22799–22807. [Google Scholar] [CrossRef] [Green Version]
- Fonseca, A.; Cabral, B. Designing a neural network from scratch for big data powered by multi-node GPUs. Smart Innov. Syst. Technol. 2019, 136, 1–19. [Google Scholar]
- Abdeljaber, O.; Avci, O.; Kiranyaz, M.S.; Boashash, B.; Sodano, H.; Inman, D.J. 1-D CNNs for structural damage detection: Verification on a structural health monitoring benchmark data. Neurocomputing 2018, 275, 1308–1317. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, P.; Wang, X.; Zhang, X.; Qin, Z. A study on water quality prediction by a hybrid CNN-LSTM model with attention mechanism. In Proceedings of the International Conference on Smart Transportation and City Engineering 2021, Chongqing, China, 26–28 October 2021. [Google Scholar]
- Lameski, P.; Zdravevski, E.; Mingov, R.; Kulakov, A. SVM parameter tuning with grid search and its impact on reduction of model over-fitting. Lect. Notes Comput. Sci. 2015, 9437, 464–474. [Google Scholar]
- Huk, M. Stochastic optimization of contextual neural networks with RMSprop. In Proceedings of the Intelligent Information and Database Systems–12th Asian Conference, ACIIDS 2020, 3rd IEEE International Conference on Data Science and Advanced Analytics, Phuket, Thailand, 23–26 March 2020. [Google Scholar]
- Buslim, N.; Rahmatullah, I.L.; Setyawan, B.A.; Alamsyah, A. Comparing bitcoin’s prediction model using GRU, RNN, and LSTM by hyperparameter optimization grid search and random search. In Proceedings of the 2021 9th International Conference on Cyber and IT Service Management, CITSM 2021, Virtual, Bengkulu, Indonesia, 22–23 September 2021. [Google Scholar]
- Bergstra, J.; Bengio, Y. Random search for hyper-parameter optimization. J. Mach. Learn. Res. 2012, 13, 281–305. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Size of Normal Sample | Size of Abnormal Sample | ||
|---|---|---|---|---|
| Level A | Level B | Level C | ||
| Training set | 6741 | - | - | - |
| Test set | 2194 | 1971 | 1962 | 1968 |
| Anomaly Type | Accuracy | F1-Score |
|---|---|---|
| Level A | 0.84 | 0.80 |
| Level B | 0.88 | 0.86 |
| Level C | 0.94 | 0.93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Qiu, Y.; Jiang, J.; Wang, H.; Nan, Q.; Sun, L. Identification of Abnormal Vibration Signal of Subway Track Bed Based on Ultra-Weak FBG Sensing Array Combined with Unsupervised Learning Network. Symmetry 2022, 14, 1100. https://doi.org/10.3390/sym14061100
Li S, Qiu Y, Jiang J, Wang H, Nan Q, Sun L. Identification of Abnormal Vibration Signal of Subway Track Bed Based on Ultra-Weak FBG Sensing Array Combined with Unsupervised Learning Network. Symmetry. 2022; 14(6):1100. https://doi.org/10.3390/sym14061100
Chicago/Turabian StyleLi, Sheng, Yang Qiu, Jinpeng Jiang, Honghai Wang, Qiuming Nan, and Lizhi Sun. 2022. "Identification of Abnormal Vibration Signal of Subway Track Bed Based on Ultra-Weak FBG Sensing Array Combined with Unsupervised Learning Network" Symmetry 14, no. 6: 1100. https://doi.org/10.3390/sym14061100