
Stability and Bifurcation Analysis of a Nonlinear Rotating Cantilever Plate System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
3. Bifurcation and Stability Analysis
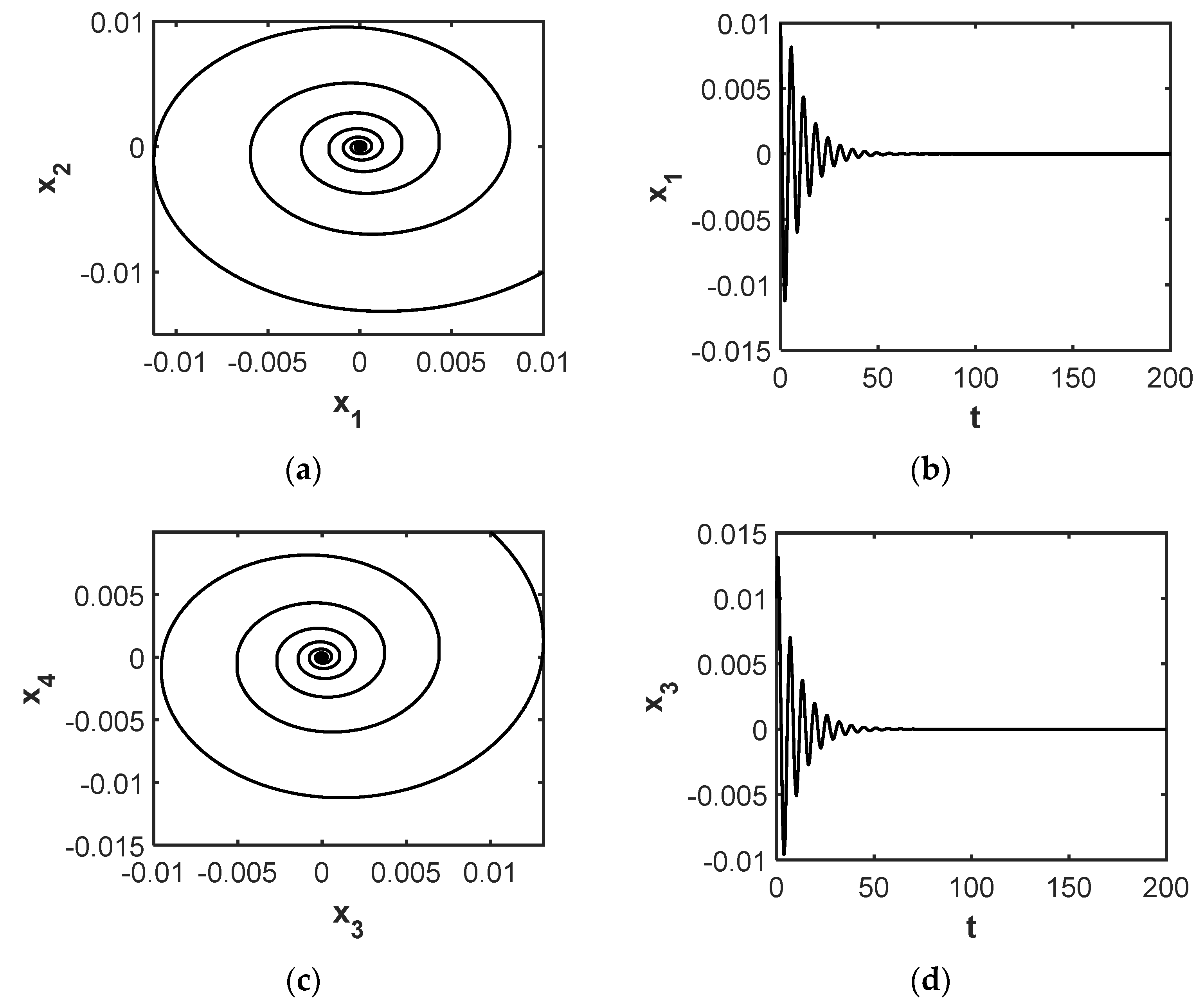
3.1. Case of Double Zero and Two Negative Eigenvalues
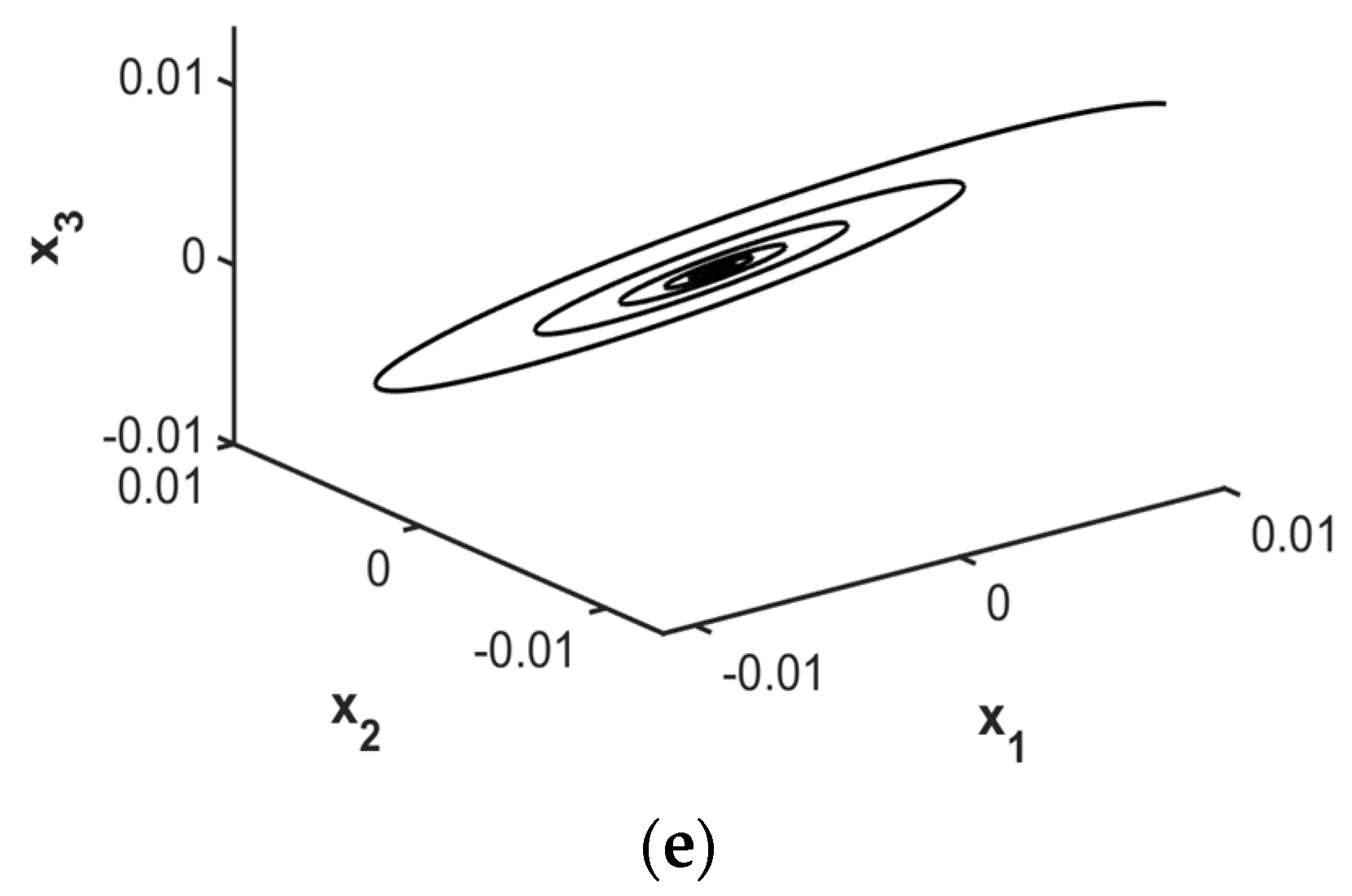
3.2. Case of a Simple Zero and a Pair of Pure Imaginary Eigenvalu3
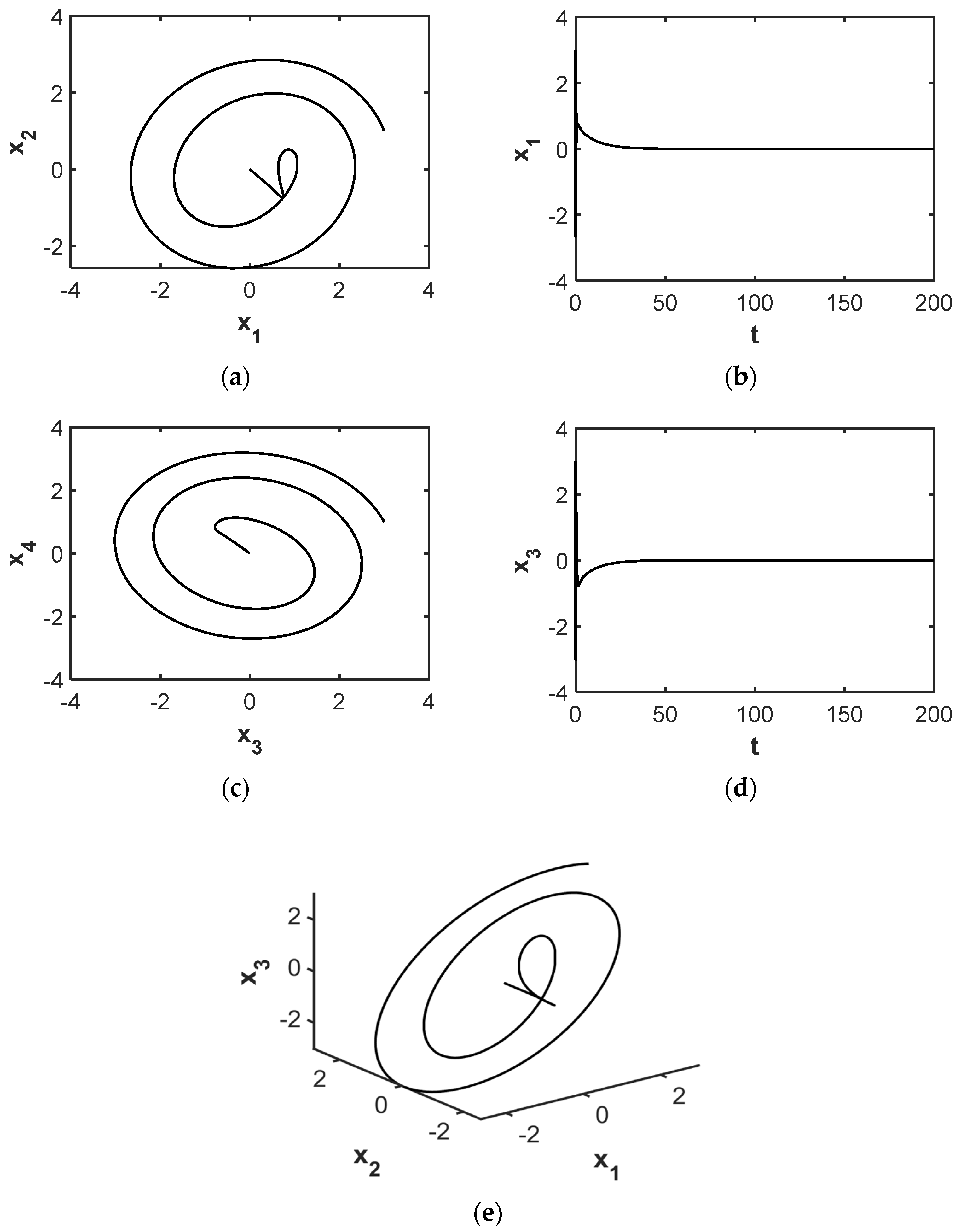
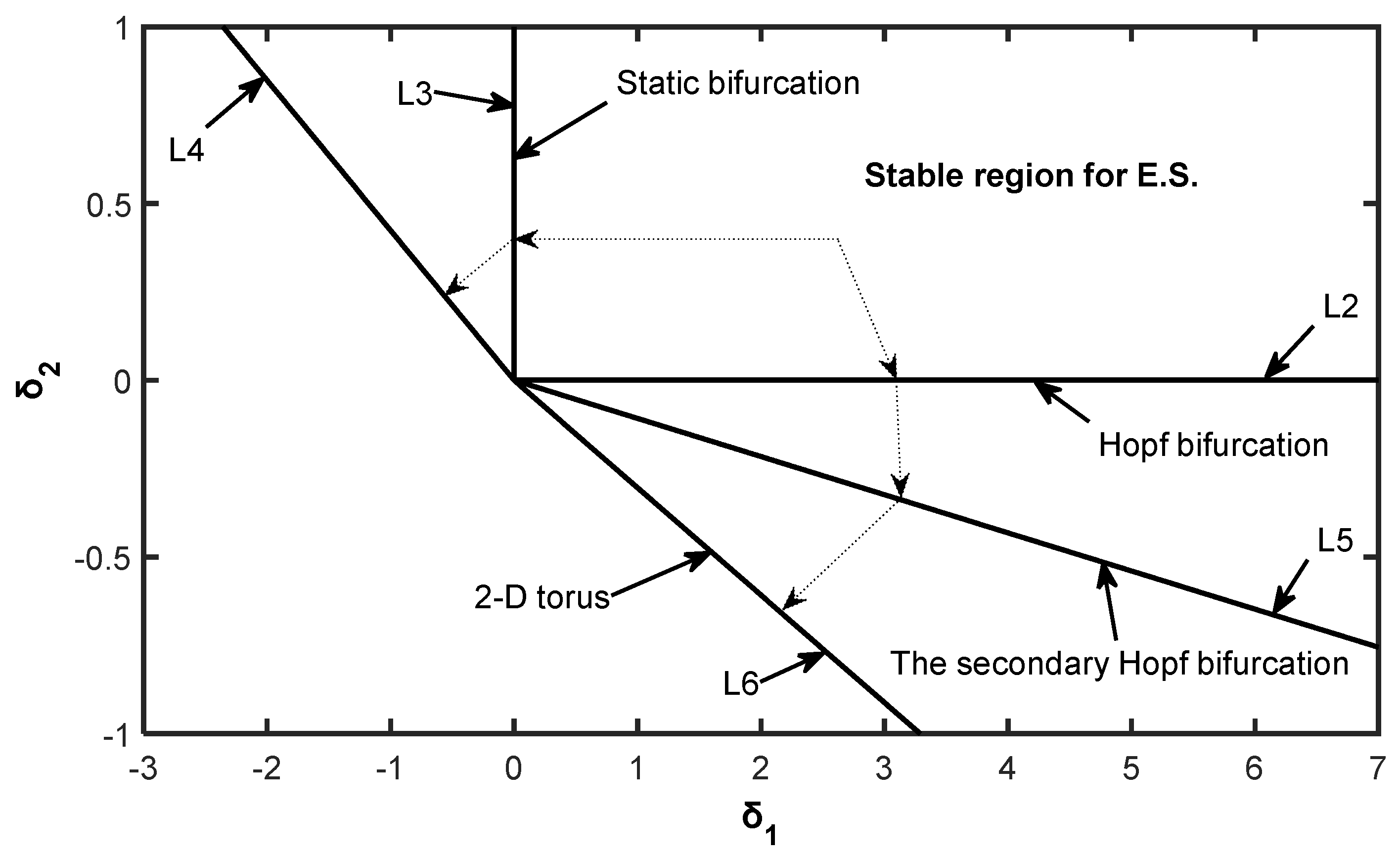
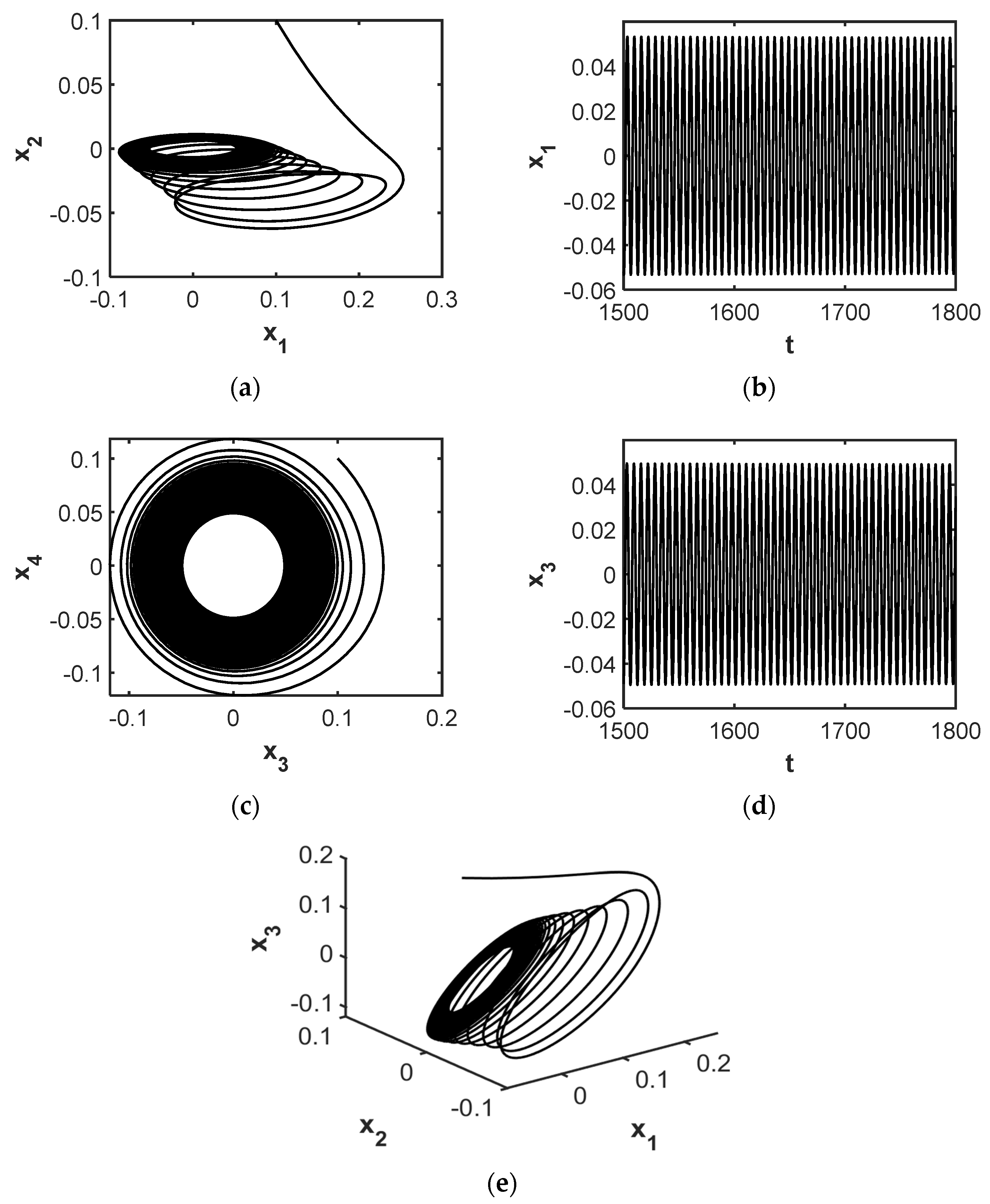
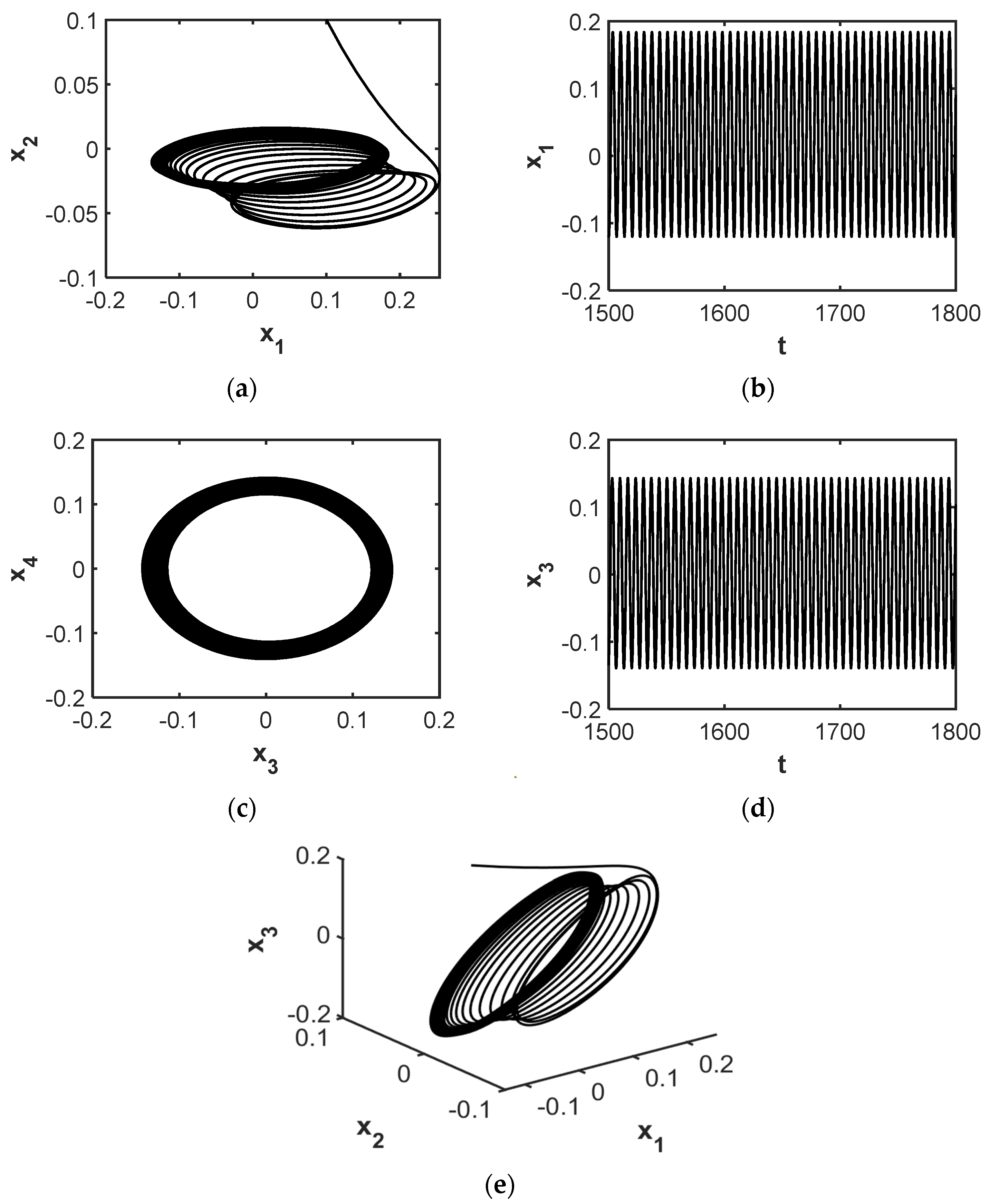
3.3. Case of Two Different Pairs of Pure Imaginary Eigenvalues
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Miyamoto, Y.; Kaysser, W.A.; Rabin, B.H.; Kawasaki, A.; Ford, R.G. Functionally Graded Materials: Design, Processing and Applications; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Wang, Y.Q.; Zu, J.W. Nonlinear oscillations of sigmoid functionally graded material plates moving in longitudinal direction. Appl. Math. Mech. 2017, 38, 1533–1550. [Google Scholar] [CrossRef]
- Reddy, J.N. Analysis of functionally graded plates. Int. J. Numer. Methods Eng. 2000, 47, 663–684. [Google Scholar] [CrossRef]
- Guo, X.Y.; Zhang, B.; Cao, D.X.; Sun, L. Influence of nonlinear terms on dynamical behavior of graphene reinforced laminated composite plates. Appl. Math. Model. 2020, 78, 169–184. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, Z.; Guo, X.Y. Nonlinear dynamics of rotating cantilever FGM rectangular plate with varying rotating speed. Sci. Technol. Rev. 2012, 30, 30–37. [Google Scholar]
- Li, Z.N.; Hao, Y.X.; Zhang, W.; Zhang, J.H. Nonlinear Transient Response of Functionally Graded Material Sandwich Doubly Curved Shallow Shell Using New Displacement Field. Acta Mech. Solida Sin. 2018, 31, 108–126. [Google Scholar] [CrossRef]
- Sitli, Y.; Mhada, K.; Bourihane, O.; Rhanim, H. Buckling and post-buckling analysis of a functionally graded material (FGM) plate by the asymptotic numerical method. Structure 2021, 31, 1031–1040. [Google Scholar] [CrossRef]
- Tao, C.; Dai, T. Analyses of thermal buckling and secondary instability of post-buckled S-FGM plates with porosities based on a meshfree method. Appl. Math. Model. 2021, 89, 268–284. [Google Scholar] [CrossRef]
- Zhang, X.H.; Chen, F.Q.; Zhang, H.L. Stability and local bifurcation analysis of functionally graded material plate under transversal and in-plane excitations. Appl. Math. Model. 2013, 37, 6639–6651. [Google Scholar] [CrossRef]
- Sharma, S.; Singh, F. Bifurcation and stability analysis of a cholera model with vaccination and saturated trearment. Chaos Solitons Fractals 2021, 146, 110912. [Google Scholar] [CrossRef]
- Tian, X.; Xu, R.; Lin, J. Mathematical analysis of a cholera infection model with vaccination strategy. Appl. Math. Comput. 2019, 361, 517–535. [Google Scholar] [CrossRef]
- Yu, P.; Huseyin, K. A perturbation analysis of interactive static and dynamic bifurcations. IEEE Trans. Autom. Control. 1988, 33, 28–41. [Google Scholar] [CrossRef] [Green Version]
- Yu, P.; Huseyin, K. On bifurcation into nonresonant quasi-periodic motions. Appl. Math. Model. 1988, 12, 189–201. [Google Scholar]
- Yu, P.; Huseyin, K. Bifurcations associated with a three-fold zero eigenvalue. Q. Appl. Math. 1988, 46, 193–216. [Google Scholar] [CrossRef] [Green Version]
- Yu, P.; Huseyin, K. Bifurcations associated with a double zero and a pair of pure imaginary eigenvalues. SIAM J. Appl. Math. 1988, 48, 229–261. [Google Scholar] [CrossRef] [Green Version]
- Cai, T.Y.; Jin, H.L.; Yu, H.; Xie, X.P. On stability switches and bifurcation of the modified autonomous Van der Pol-Duffing equations via delayed state feedback control. Symmetry 2021, 13, 2336. [Google Scholar] [CrossRef]
- Yu, P. Analysis on double Hopf bifurcation using computer algebra with the aid of multiple scales. Nonlinear Dyn. 2002, 27, 19–53. [Google Scholar] [CrossRef]
- Gazor, M.; Mokhtari, F. Norm forms of Hopf-zero singularity. Int. J. Bifurc. Chaos 2008, 18, 2293–3408. [Google Scholar] [CrossRef] [Green Version]
- Yu, P. Symbolic computation of normal forms for resonant double Hopf bifurcations using a perturbation technique. J. Sound Vib. 2001, 247, 615–632. [Google Scholar] [CrossRef] [Green Version]
- Xue, M.; Gou, J.T.; Xia, Y.B.; Bi, Q.S. Computation of the normal form as well as the unfolding of the vector field with zero-zero-Hopf bifurcation at the origin. Math. Comput. Simul. 2021, 190, 377–397. [Google Scholar] [CrossRef]
- Algaba, A.; Fuentes, N.; Gamero, E.; Garcia, C. Orbital normal forms for a class of three-dimensional systems with an application to Hopf-zero bifurcation analysis of Fitzhugh–Nagumo system. Appl. Math. Comput. 2020, 369, 124893. [Google Scholar] [CrossRef]
- Algaba, A.; Fuentes, N.; Gamero, E.; Garcia, C. On the integrability problem for the Hopf-zero singularity and its relation with the inverse Jacobi multiplier. Appl. Math. Comput. 2021, 405, 126241. [Google Scholar] [CrossRef]
- Kincaid, D.; Cheney, W. Numerical Analysis: Mathematics of Science Computing; American Mathematical Society: Providence, RI, USA, 2009. [Google Scholar]
- Huang, J.L.; Wang, T.; Zhu, W.D. An incremental harmonic balance method with two-scales for quasi-periodic responses of a Van der Pol-Mathieu equation. Int. J. Non-Linear Mech. 2021, 135, 103767. [Google Scholar] [CrossRef]
- Huang, J.L.; Zhou, W.J.; Zhu, W.D. Quasi-periodic motions of high-dimensional nonlinear models of a translating beam with a stationary load subsystem under harmonic boundary excitation. J. Sound Vib. 2019, 462, 114870. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Zhang, D.; Qian, Y. Stability and Bifurcation Analysis of a Nonlinear Rotating Cantilever Plate System. Symmetry 2022, 14, 629. https://doi.org/10.3390/sym14030629
Chen S, Zhang D, Qian Y. Stability and Bifurcation Analysis of a Nonlinear Rotating Cantilever Plate System. Symmetry. 2022; 14(3):629. https://doi.org/10.3390/sym14030629
Chicago/Turabian StyleChen, Shuping, Danjin Zhang, and Youhua Qian. 2022. "Stability and Bifurcation Analysis of a Nonlinear Rotating Cantilever Plate System" Symmetry 14, no. 3: 629. https://doi.org/10.3390/sym14030629