1. Introduction
Stokes flow is incompressible viscous flow in slow motion. Stokes flow has numerous crucial functions in industries such as medical applications, the design of innovative materials, lab-on-chip technologies, microdevices, and biological systems. For instance, dust settles, and microbes swim in a fluid, both of which are instances of Stokes flow. Stokes flow is also known as the flow of high-viscosity fluids, such as melt extrusion or the transportation of paints, heavy oils, or food-processing ingredients [
1]. Some essential characteristics of Stokes flow, such as negligibility of inertial forces, reversibility, and the minimal energy dissipation theorem, were explored by [
2]. Navier–Stokes flow situations can be subdivided into Stokes flow problems, with nonlinear convective components being very minor or ignored [
1]. The authors in [
1] presented two cases, steady-state Stokes flow (
) and a very low Reynolds number Stokes flow problem solved with Navier–Stokes equation (
). As a problem model, they utilized a square cavity with a moving top lid with constant velocity, and solved this problem using the dual reciprocity boundary element method (DRBEM). Then, they came up with an iterative DRBEM for solving the Stokes flow problem by adding another model problem, a circular cavity [
3]. In the study by [
4], the two-dimensional Stokes flow problem was solved by developing the analytical method of superposition. A rectangular chamber containing a cylinder was utilised as a model problem to investigate distributive mixing processes in periodic Stokes flows. The authors in [
5] used vorticity–velocity formulation in combination with the multiquadric method (MQ) to handle steady-state Stokes flow problems in 2D and 3D. Three numerical problems were used to evaluate the truth and effectiveness of the MQ scheme: a 2D square cavity problem, a 3D cubic cavity flow problem, and a circular cavity. The 2D Stokes flows in a lid-driven square cavity, rectangle cavity with wave-shaped bottom, and cubic cavity were solved using the method of fundamental solutions (MFS) by [
6].
The interaction of fluid in motion with a magnetic effect is among the most studied due to its many industrial and medical applications. Magnetic devices for cell separation, targeted medication delivery, magnetic cancer tumour therapy, bleeding reduction during surgery, and magnetic tracers are just a few of the uses for magnets being developed [
7,
8,
9,
10]. Thus, the present study investigates Stokes flow with the effect of a point-source magnetic field. Ferrohydrodynamics (FHD) and magnetohydrodynamics (MHD) are a branch of fluid mechanics. The body force in FHD is due to polarisation force, while the Lorentz force occurs in MHD when an electric current passes through a fluid and exerts an effect on it [
11]. The 2D MHD Stokes flow produced by a concentrated point force was analytically obtained by [
12]. The 2D MHD Stokes flow equations in a lid-driven cavity and a backward-facing step channel subjected to the external magnetic effect with different directions were solved by [
13] using the radial basis function (RBF) approximation method. The authors in [
14] employed RBF for solving 2D MHD Stokes flow in a square constricted enclosure with a moving left wall with enforced magnetic field in the direction. Then, they solved MHD Stokes flow using the same numerical method in the same problem domain, but the external magnetic field from three different directions was applied [
15]. The authors in [
16] studied Stokes flow in a lid-driven and circular cavity under an external magnetic field source. Fluid flow equations in their problem were comparable to those used in FHD. They implemented DRBEM in solving this problem. In [
17], the solution of the MHD Stokes eigenvalue problem was approximated by using the Chebyshev spectral collocation method (CSCM).
In this study, the least-squares finite element method (LSFEM) was employed to solve two-dimensional Stokes flow subjected to point magnetic source. The authors in [
18] studied the theory of LSFEM for the numerical solution of elliptic boundary-value problems. The use of LSFEM in solving the Stokes problem was first presented by [
19]. They developed LSFEM on the basis of first-order velocity–pressure–vorticity formulation for a simple one-dimensional Stokes problem. On the basis of their findings, LSFEM leads to a minimisation problem rather than to a saddle-point problem, which happened in the Galerkin mixed method. Thus, LSFEM does not depend on the LBB condition. LSFEM has an additional vorticity degree of freedom as compared to the mixed FEM, which only has pressure and velocity. This makes the LSFEM matrix larger than the mixed FEM, and it theoretically takes a longer time to solve. However, the matrix generated by LSFEM is symmetric and positive-definite, whereas the matrix generated by mixed FEM is not symmetric due to the convective term, and the matrix is a zero diagonal because of the absence of a pressure term in the continuity equation. As such, mixed FEM requires a direct solver with pivoting. On the other hand, LSFEM can be solved by using a very efficient iterative solver such as preconditioned conjugate gradient method in a fully parallel environment. This offers the method additional advantages from a computational point of view. The benefit of using the LSFEM over other vorticity-related techniques is that no artificial numerical boundary conditions for the vorticity must be created [
20,
21,
22,
23,
24]. The authors in [
25] presented LSFEM for Navier–Stokes equations of viscous incompressible fluids. They focused on first-order systems based on velocity–vorticity formulation associated with the mixed formulation. Predominantly low-order nodal expansion was employed to develop the discrete finite element model in the context of least-squares finite element formulations. However, low order nodal expansions tend to lock when the least-squares functional is a nonequivalent formulation. Locking occurs in lower-order elements because the element’s kinematics are insufficient to represent the correct solution. It means the effect of a reduced rate of convergence in dependence of a parameter. Therefore, the present study is proposed to use the higher-order element to prevent this locking issue.
In this paper, a fully developed, steady, laminar, electrically nonconducting, incompressible fluid was considered under the influence of an external point-source magnetic field. This study proposes LSFEM for solving Stokes flow subjected to a point-source magnetic field in a straight rectangular channel problem. This serves as a fundamental work to investigate and overcome the issue in LSFEM in the presence of highly nonlinear body force. Results concerning velocity contour and streamline patterns are presented and discussed. To the authors’ knowledge, this study is the first implementation of the LSFEM for the study of Stokes flow under a point-source magnetic field.
2. Mathematical Formulation
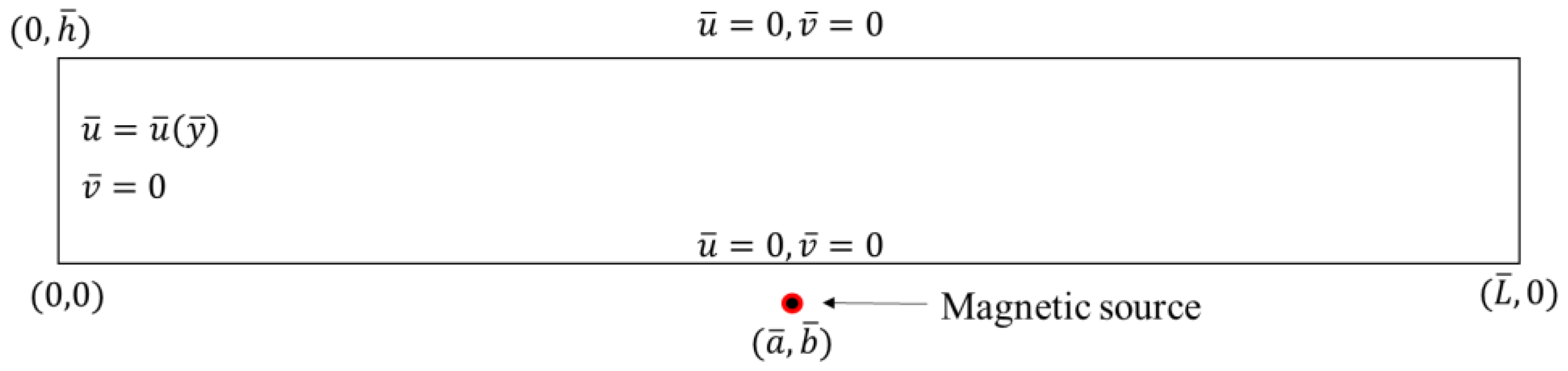
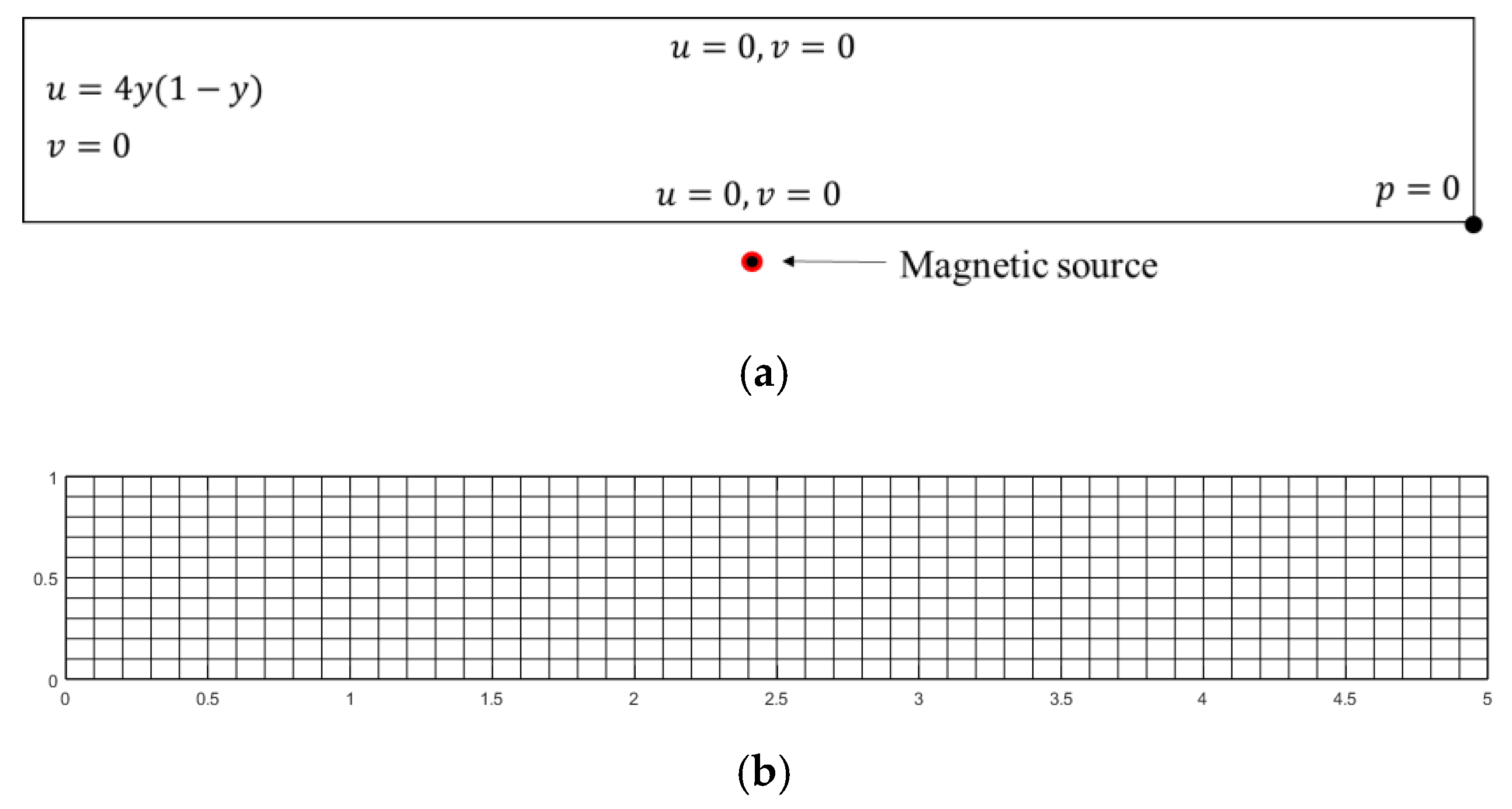
Flow was considered to be fully developed, incompressible, steady, laminar, and electrically nonconducting under the point-source magnetic field. The fluid was flowing through two parallel plates (channel). The length of the plates was
and the distance between them was
, such that
. The entrance velocity was assumed to be fully developed flow, whereas the Neumann boundary condition for the exit velocity was set as zero. A no-slip condition was imposed on the upper and bottom walls of the channel, and a zero-pressure boundary was imposed at the right lower corner of the channel. The magnetic source was located below the bottom wall of the channel, as shown in
Figure 1.
The governing equations of the fluid flow are similar to those derived for ferrohydrodynamics (FHD) [
11,
16]. Continuity and momentum equations defining the two-dimensional flow are given by
The boundary conditions of the problem are summarised as follows:
where
is a parabolic velocity profile corresponding to fully developed flow,
stands for
or
,
is the fluid density,
is the dynamic viscosity, and
is the magnetic permeability of the fluid;
is magnetic field intensity, and
is magnetisation. Terms
and
from (2) and (3) represent the magnetisation force per unit volume and are known as the FHD terms.
According to FHD, magnetisation property
is generally a function of magnetic field intensity, fluid temperature, and density of fluid. Since temperature was considered to be negligible in this present study, the following relation for magnetic fluid was considered:
where
is magnetic susceptibility.
The components of magnetic field intensity
and
along the
and
directions are given as
where
is the point where the magnetic source is placed, and
is the magnetic field strength at the point. Magnitude
of the magnetic field intensity is given by
5. Results and Discussion
Two-dimensional Stokes flow in a straight rectangular channel subjected to a point-source magnetic field was solved by using LSFEM. The same assumption as in the previous simulation prevailed, where it was assumed that the Stokes flow was fully developed, steady, laminar, incompressible, electrically nonconducting, and under the effect of the point-source magnetic field. In this channel, a spatially varying magnetic field was generated by placing the magnetic source below the lower wall of the channel at the location . Different magnetic numbers were studied. From the simulation, the flow characteristics are discussed.
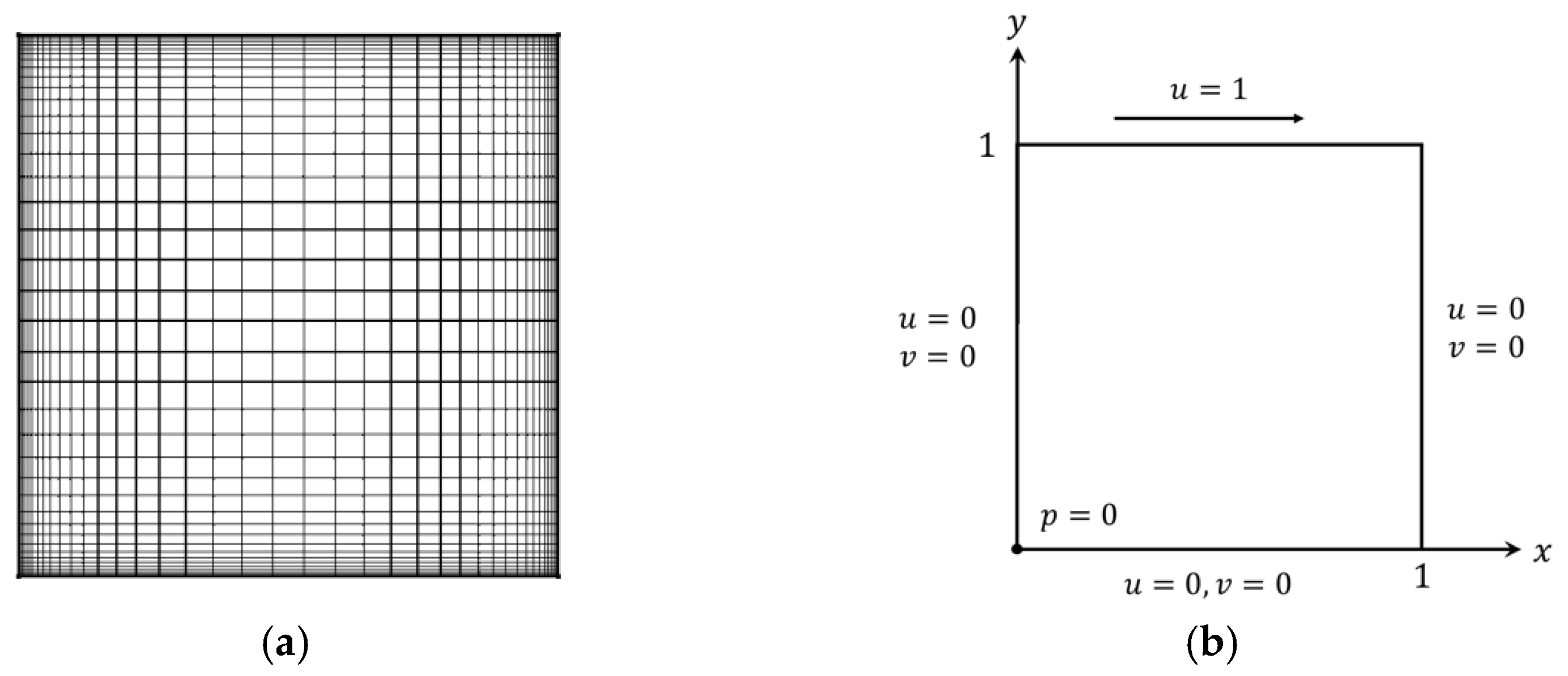
Figure 7a displays the computational domain and boundary conditions. Entrance velocity was assumed to be a fully developed flow, whereas the Neumann boundary condition for the exit velocity was set as zero. A no-slip condition was imposed on the upper and bottom walls of the channel, and a zero-pressure boundary is imposed at the lower right corner of the channel. The mesh for the computational domain is shown in
Figure 7b. Structured rectangular mesh with a 12-node serendipity element was used for the computational domain.
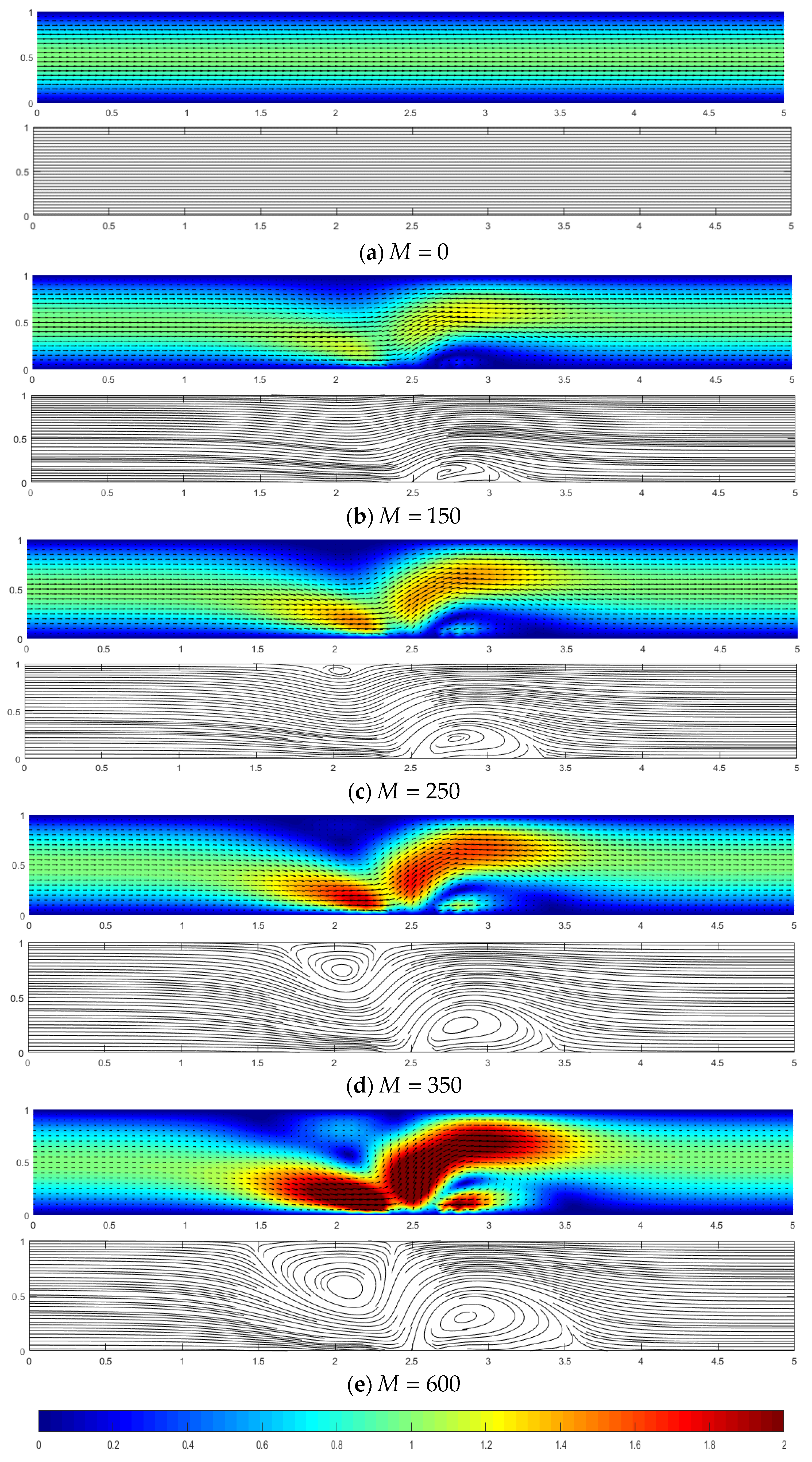
The velocity contour and streamline pattern for the Stokes flow subjected to various magnetic field numbers are presented in
Figure 8. When the magnetic field was not imposed
, fluid flow moved in parallel. When the magnetic source was applied at the lower wall, a small vortex formed at the area where the point-source magnetic field was located. Starting from
, the applied point-source magnetic field disturbed the flow. When the magnetic number increased to 250, a new vortex formed at the upper wall of the channel, while the vortex at the lower wall grew. Starting with
, the height and length of the vortex at both the lower and upper walls of the channel increased with the increment of magnetic number.
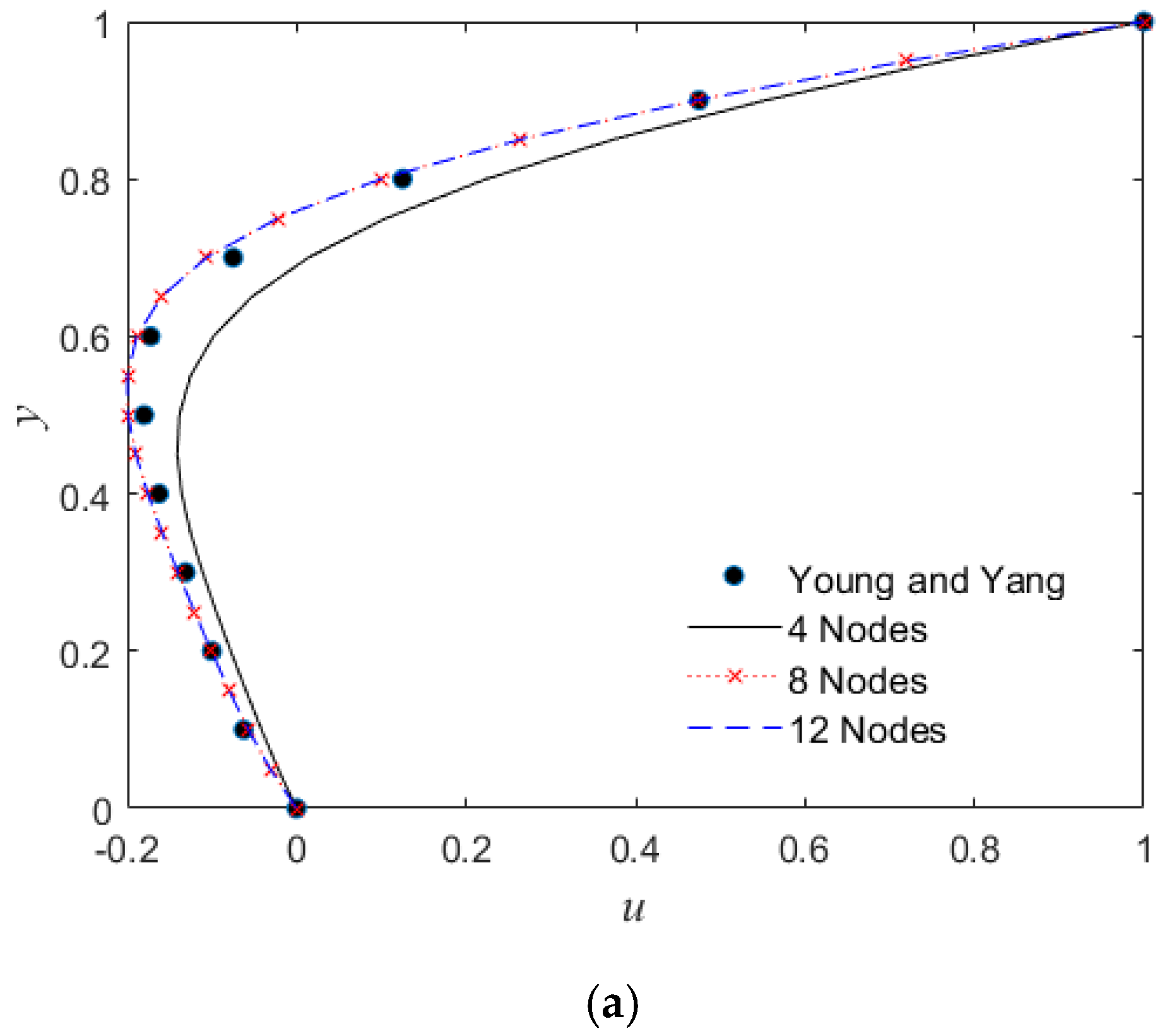
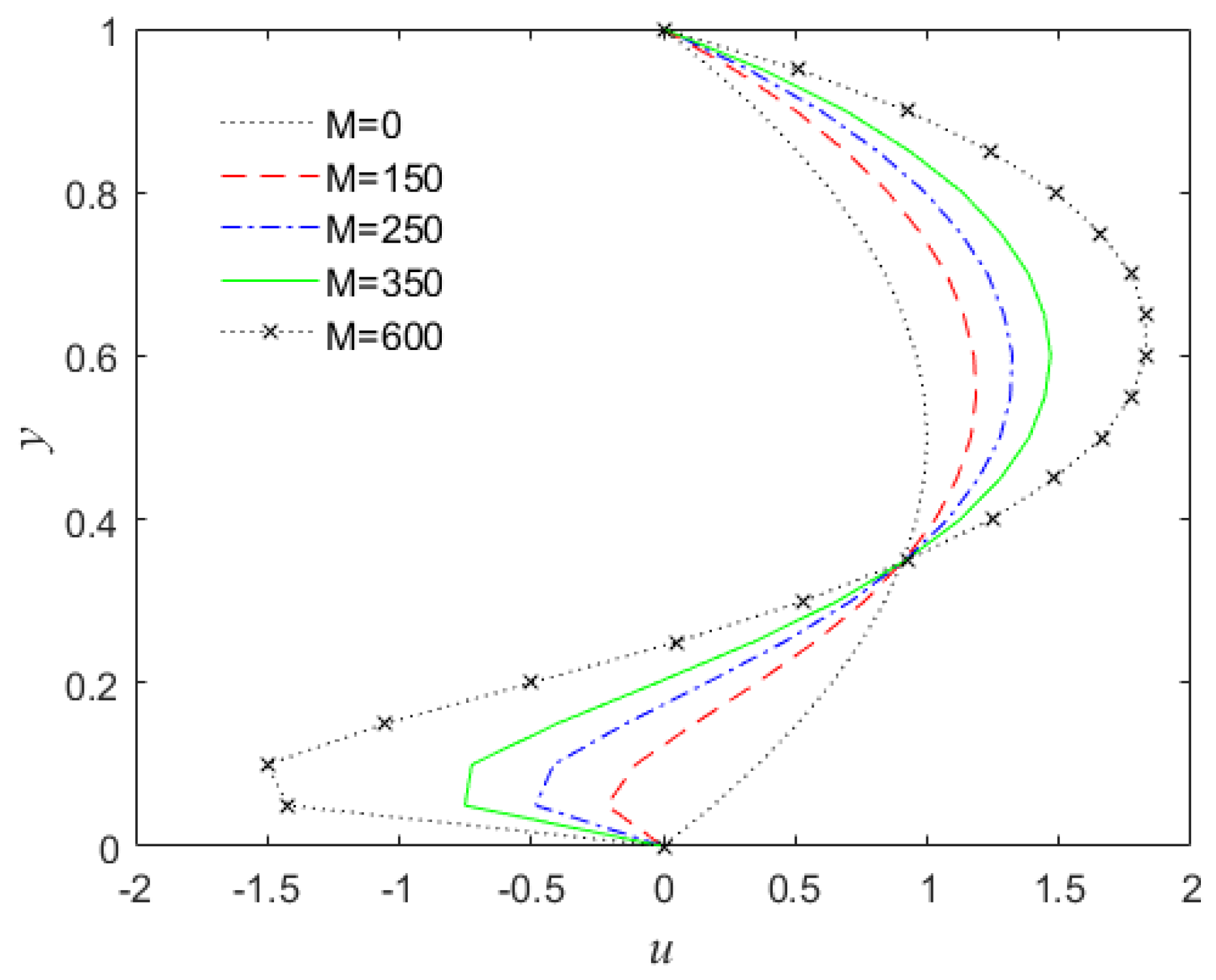
Figure 9 presents the
u-velocity profiles along
y for different magnetic numbers. The velocity profile changed form when a magnetic field was applied, as can be seen here. Due to the magnetic field action, a vortex formed on the bottom wall. Additionally, when the number of magnetic fields grew, maximal velocity also increased.
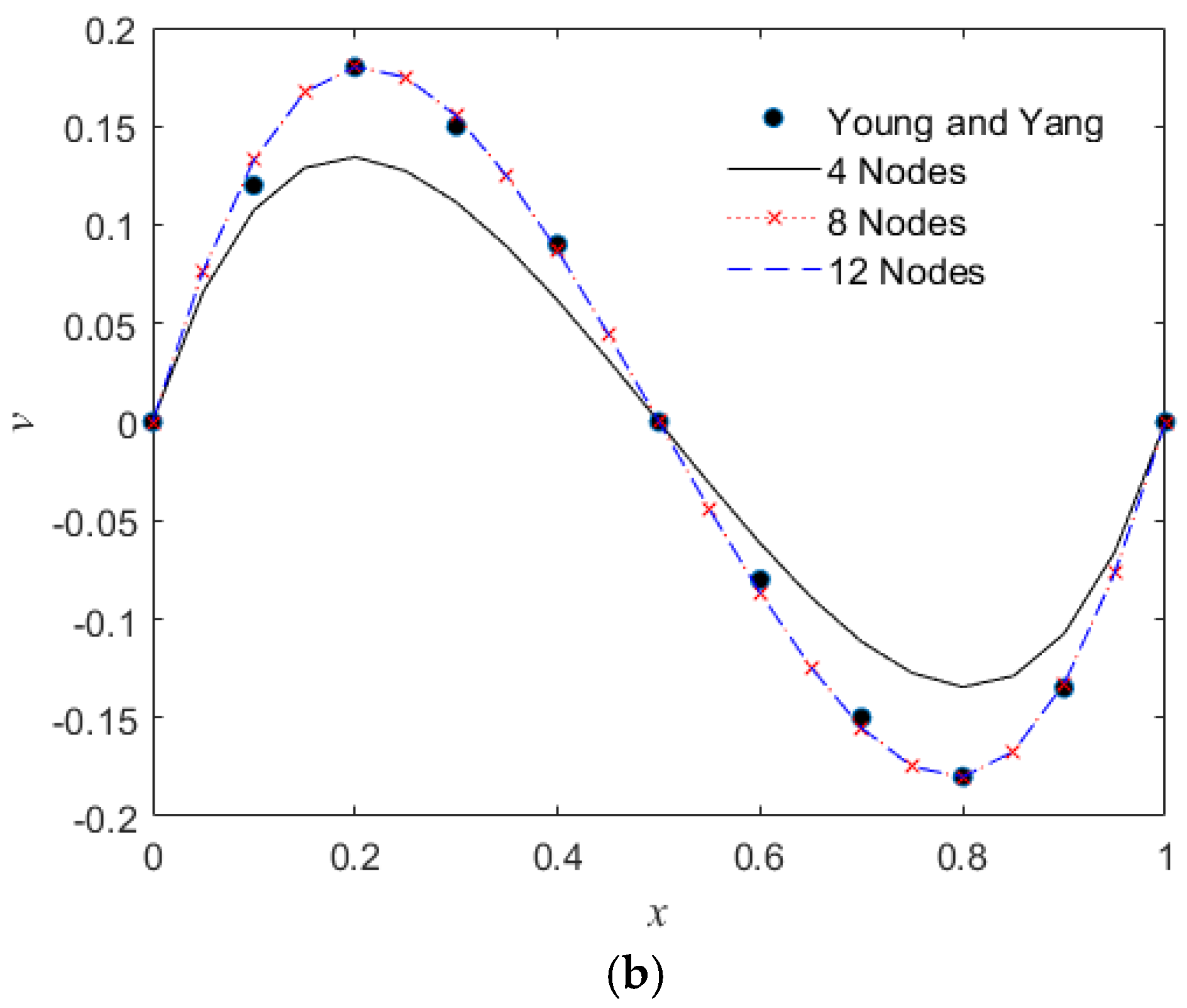
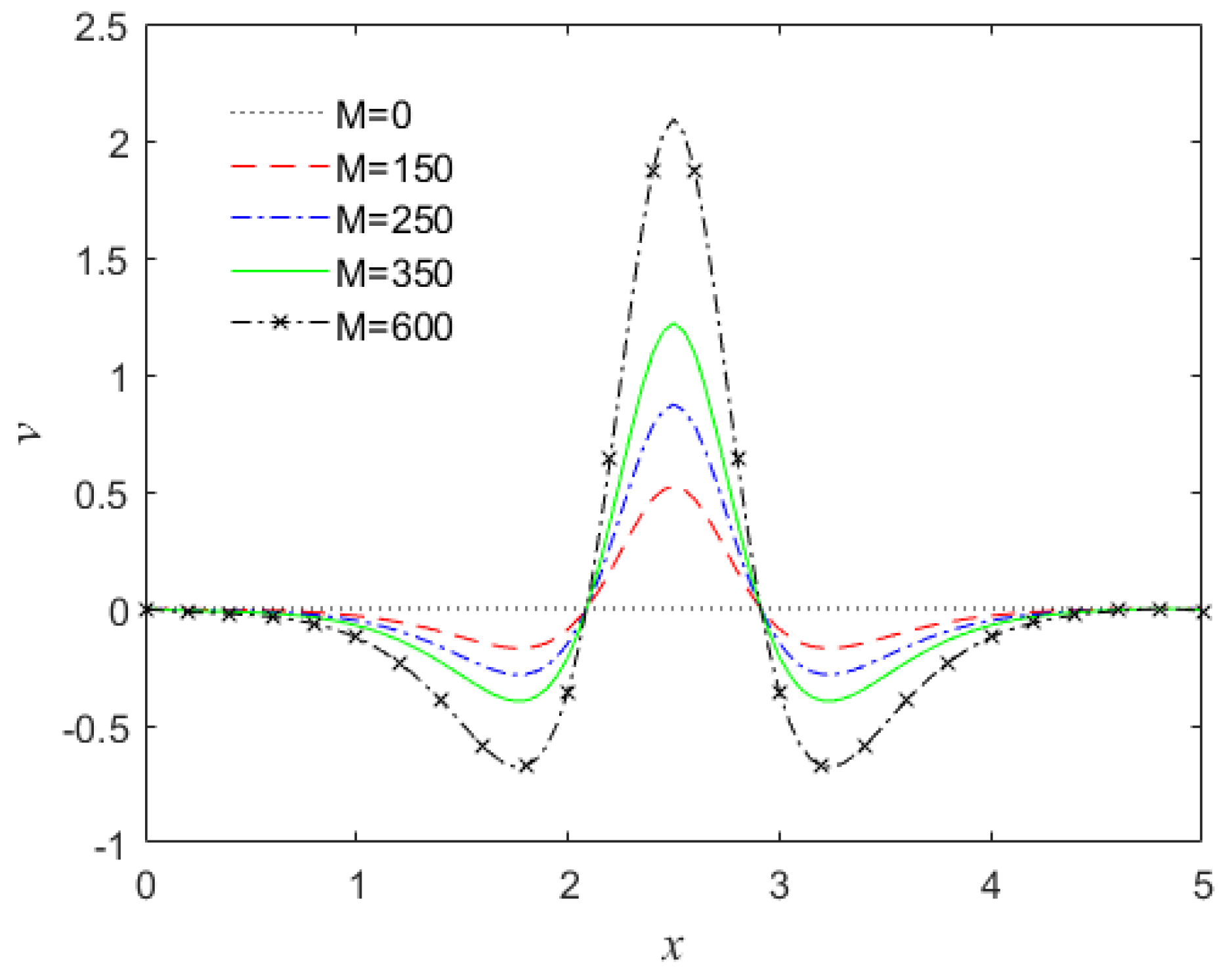
The comparison of the
v-velocity profile along the channel at
y = 0.5 for different magnetic numbers is shown in
Figure 10, where the axial velocity took the same shape for all cases except for flow without a magnetic field. Flow with a magnetic field showed that velocity flow retained a constant value at the beginning of the flow; then, velocity dropped before the point of the magnetic source was applied. As the flow approached the source of the magnetic field, velocity increased to the maximum. Maximal velocity for all cases of flow with a magnetic field was observed at
x = 2.5 where the point-source magnetic field was located. Velocity dropped again after passing through the magnetic field source and then remained constant until the exit. Axial velocity for flow under the effect of the point-source magnetic field demonstrated that the minimal velocity values before and after the magnetic field source were the same.
6. Conclusions
This work effectively modelled the Stokes equation with a point-source magnetic field using the least-squares finite element method. Governing equations were recast into an analogous first-order system by introducing an extra independent variable, vorticity. As a result, researchers concentrate on first-order systems that employ the velocity–vorticity formulation. The Stokes problem can be easily solved using the least-squares approach. The development of MATLAB source code is indirectly simplified. The LSFEM, on the other hand, has a problem with locking nodal expansions at low orders. The present study proposed a solution for this problem where the domain of the problem is discretized using higher-order element nodes without applying the reduced integration technique. Thus, the 12-node serendipity element must be used to obtain acceptable numerical results.
The numerical simulation of Stokes flow in a straight rectangular channel under a point-source magnetic field was carried out, and the findings of the velocity contour and streamlines pattern were observed and analysed. Incorporating a magnetic field alters the flow behaviour. After applying a magnetic field, a single vortex could be seen on the lower wall. In response to an increase in magnetic number, a new vortex formed at the channel’s upper wall. As the number of magnetic fields rose, vortices dramatically grew. Results signify the use of LSFEM as an alternative for modelling Stokes flow problems. This work is considered to be the first implementation of the least-squares finite element method on solving Stokes flow in the straight rectangular channel under a point-source magnetic effect. No study has investigated the magnetic effect for Stokes flow in a straight channel. The closest study is by [
27], where the magnetic effect was investigated on the basis of the Navier–Stokes equation using a finite difference method. The current study focused on solving the Stokes flow with a magnetic effect using LSFEM. Observed results by this study and by [
27] in terms of magnetic strength had a similar effect on the lower wall of the channel.
The LSFEM was successfully employed for the solution of Stokes equations; hence, the LSFEM is proposed for solving the Navier–Stokes equation with and without a magnetic effect for future work. This would allow for the inclusion of convection acceleration and nonlinearity of the solution.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










