1. Introduction
Quadrotor unmanned aerial vehicles (UAVs) are multi-rotor aircraft that can take off, land and hover freely. Due to the high flexibility, low cost and strong concealment, they are widely used in various fields, such as rescue and disaster relief, aerial photography mapping, agricultural plant protection, inspection etc. A quadrotor UAV is a typical multi-input multi-output, under-actuated and strongly coupled nonlinear system. In the process of flight, attitude transformation and flight stability are the top priorities; therefore, it is particularly important to study the flight attitude control [
1]. The research on the flight control of quadrotor UAVs has become a hotspot in recent years.
Currently, all kinds of control methods, including proportional-integral-differential (PID) control [
2], active disturbance rejection control [
3,
4], sliding mode control [
5,
6,
7,
8] and neural network control [
9], have been utilized in the attitude control of quadrotor UAVs. The article [
2] shows the property of stability and robustness for a nonlinear implicit PID control algorithm of finite-time stabilization of quadrotor UAVs subject to constraints bounded external disturbance. Active disturbance rejection control comes from the improvement of PID control [
3].
This is mainly composed of a tracking differentiator, state observer and nonlinear state error feedback control law. In [
4], by the combination of adaptive control technique, a linear active disturbance rejection control strategy was developed to address the attitude control problem for the quadrotor UAV systems. Sliding mode control, as a well-known robust control method [
5,
6], has also been used in quadrotor flight control.
For instance, in [
7], a discrete-time sliding-mode control algorithm was proposed for solving the position and attitude tracking control of a small quadrotor UAV. In [
8], a sliding-mode attitude tracking control of the quadrotor UAVs with time-varying mass was designed. As an advanced intelligent control algorithm, an RBF neural network has a powerful learning ability, can learn complex uncertain models online and can deal with highly nonlinear control problems. The authors of [
9] proposed a fault-tolerant control algorithm for quadrotors, which effectively enhanced the robustness of the system by combining the advantages of non-singular terminal sliding mode control and neural network.
To make full use of the advantages of sliding mode control and adaptive control methods, adaptive sliding mode control design of the quadrotor have also been investigated to improve robustness and adaptability in the literature. In [
10], on the basis of Udwadia–Kalaba theory, the adaptive robust tracking control problem is considered for quadrotor UAVs with mismatched uncertainties.
In [
11,
12], adaptive fuzzy global sliding mode control methods are presented for quandrotor UAVs subject to parameter uncertainties and control chattering problems. A finite-time adaptive integral backstepping sliding mode control design method is introduced in [
13], where adaptive control is used to compensate the unknown disturbance upper bound, and semi-global practical stability of the fight attitude control of the quadrotor is achieved.
It is worth noting that most of the results on adaptive sliding mode control of the quadrotor are based on the continuous-time controller, and the controller structure is relative complex. In fact, it was said in [
14] that a discrete-time control scheme is much more suitable in practicable situations since the utilization of computer and network in the quadrotor, which is a challenging task has not been well solved so far.
On the other hand, signal discrete sampling in modern control theory is essential due to the wide application of digital controllers. Middleton and Goodwin introduced the delta operator discretization method to the modern control fields [
15,
16]. Compared with the discretization technique based on traditional shift operator method, the delta operator method is more suitable for high-speed sampling [
17,
18]. The authors in [
19] studied the robust fault-tolerant stabilization of uncertain switched systems under delta operator framework.
In [
20,
21], the insensitive robust output tracking controller design and
filter design for discrete-time systems were studied in a unified delta operator approach framework. The results showed that the delta-domain model was better than the standard shift-domain model in avoiding the inherent numerical ill-conditions at high sampling rates. Recently, using the delta operator approach, the consensus problem of muli-agent systems are well investigated in [
22,
23]. It is worth noticing that few results have been published associated with the control design of quadrotor UAVs under a delta operator framework, which is a high-speed discrete sampling system.
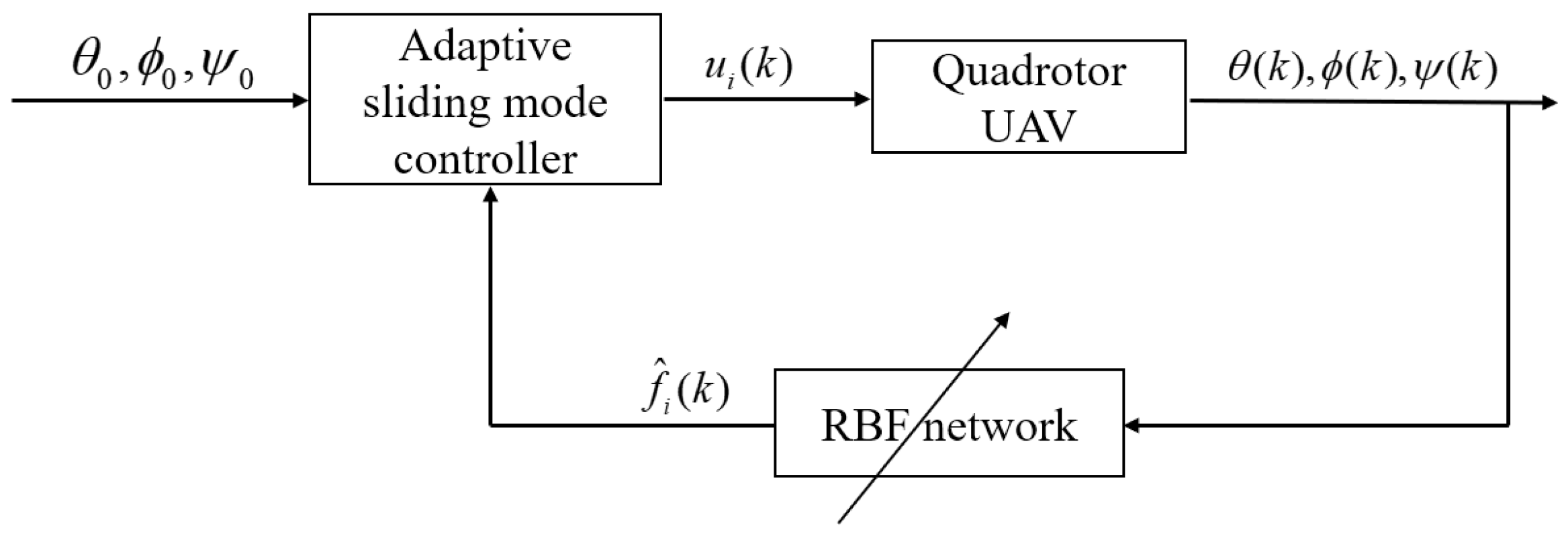
Inspired by the above research works, this paper is concerned with adaptive sliding-mode attitude control design problem for quadrotor UAVs based on delta operator framework. The main contribution of this paper is summarized as follows. First, the delta operator technique is used to discretize the attitude system of the quadrotor UAV. Then, the designs of linear sliding surface and an adaptive sliding mode reaching control law are shown in the delta domain. The design of the linear sliding surface is on the basis of linear matrix inequality technique, and it ensures the asymptotic stability of the quadrotor UAVs on sliding motion.
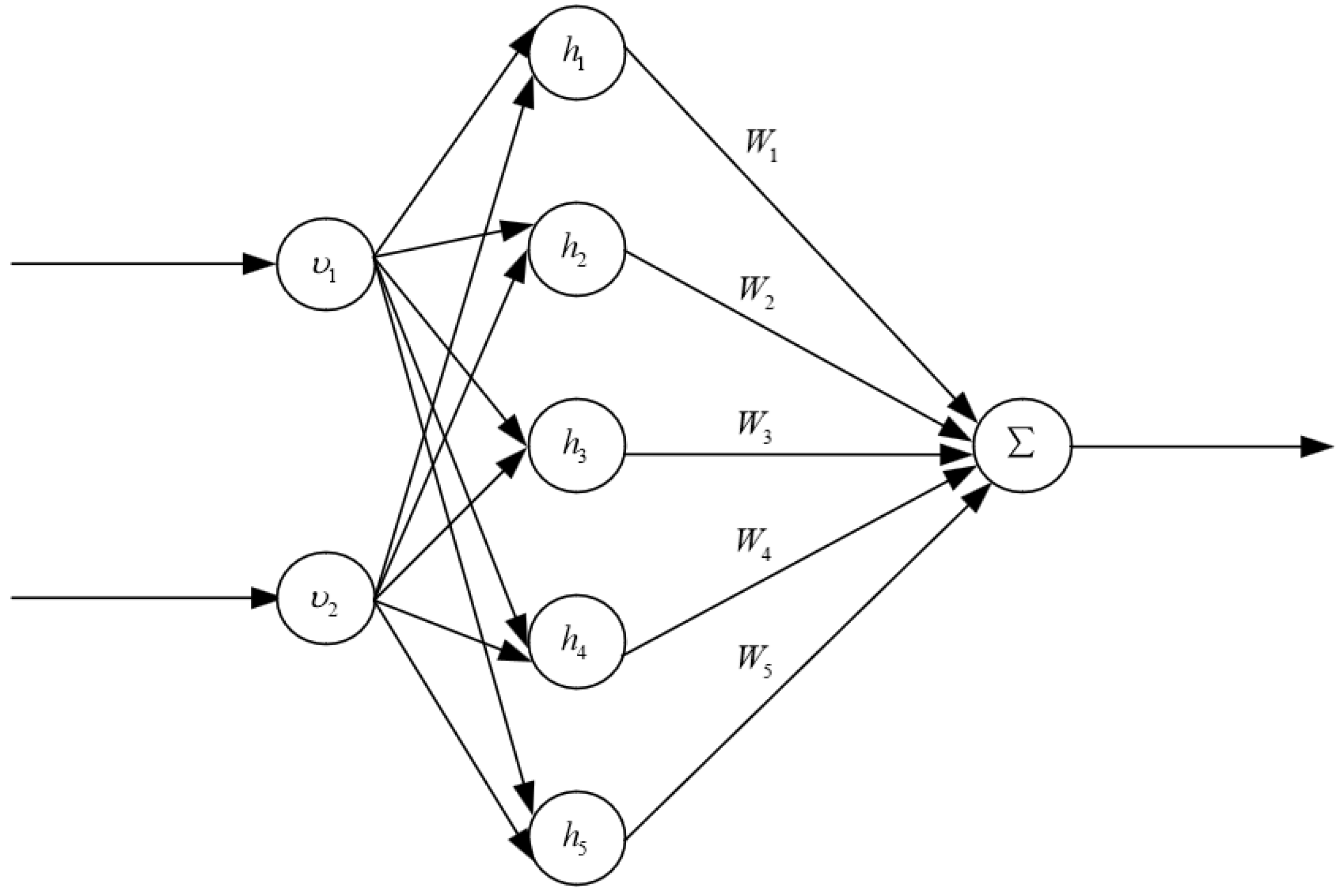
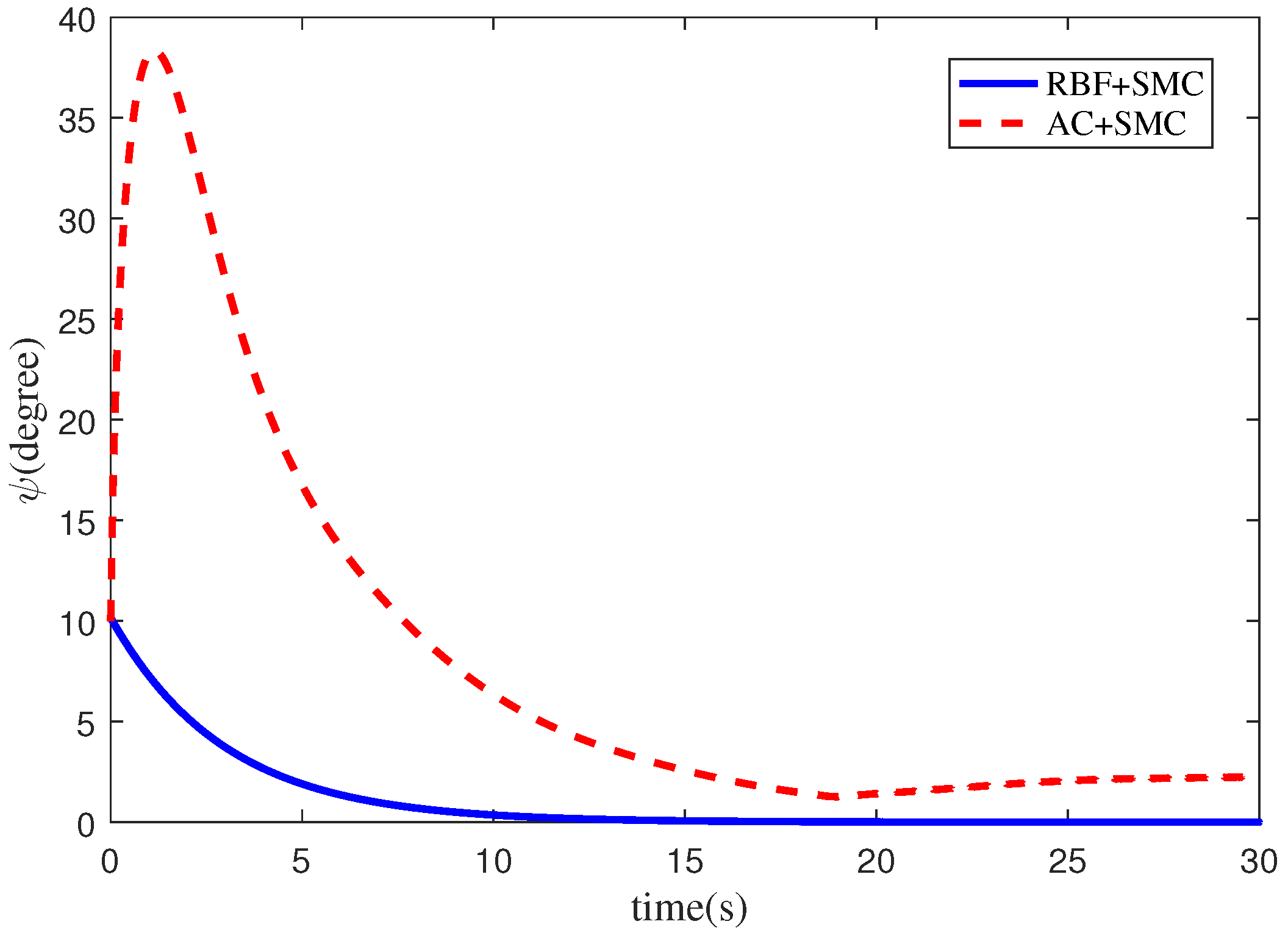
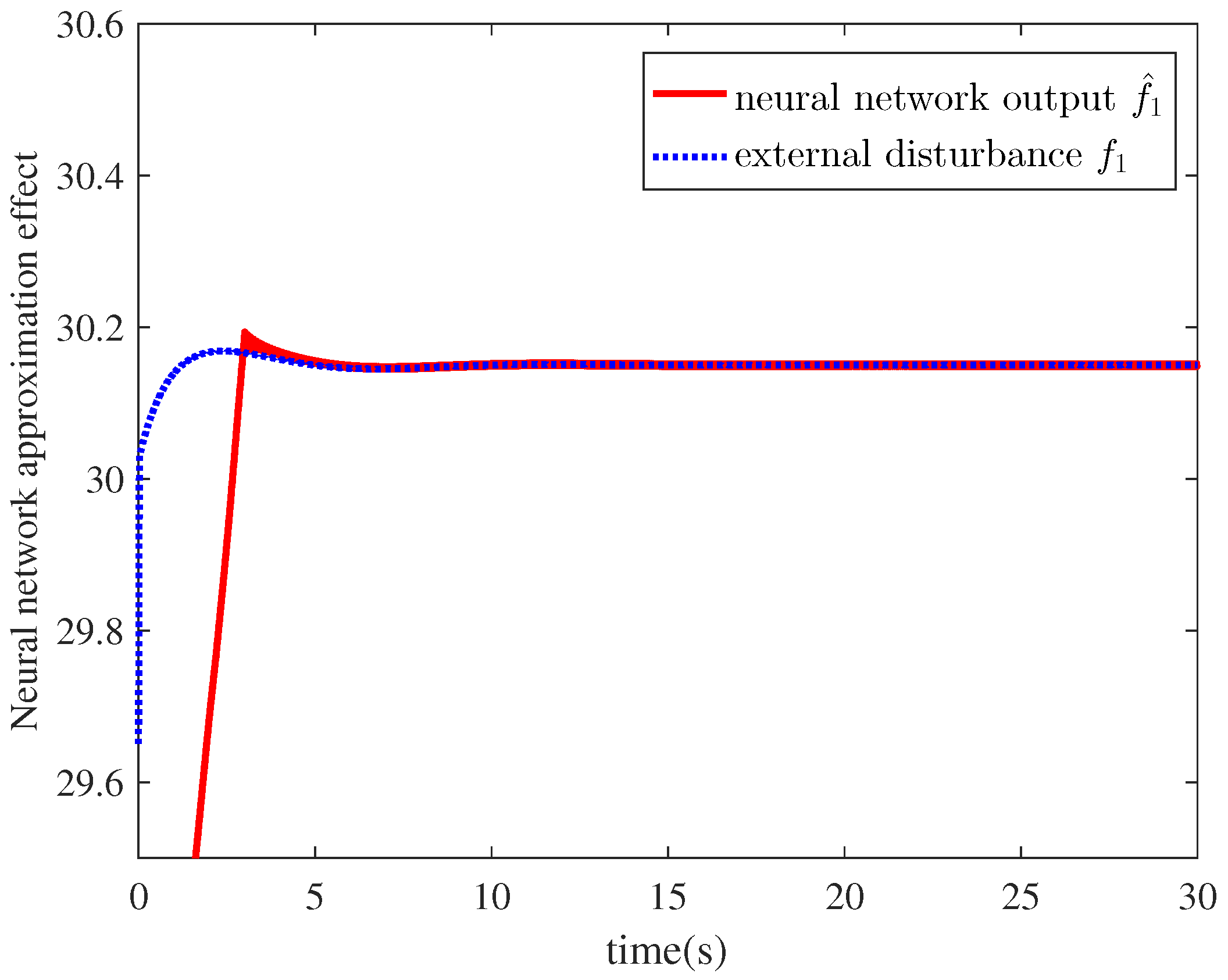
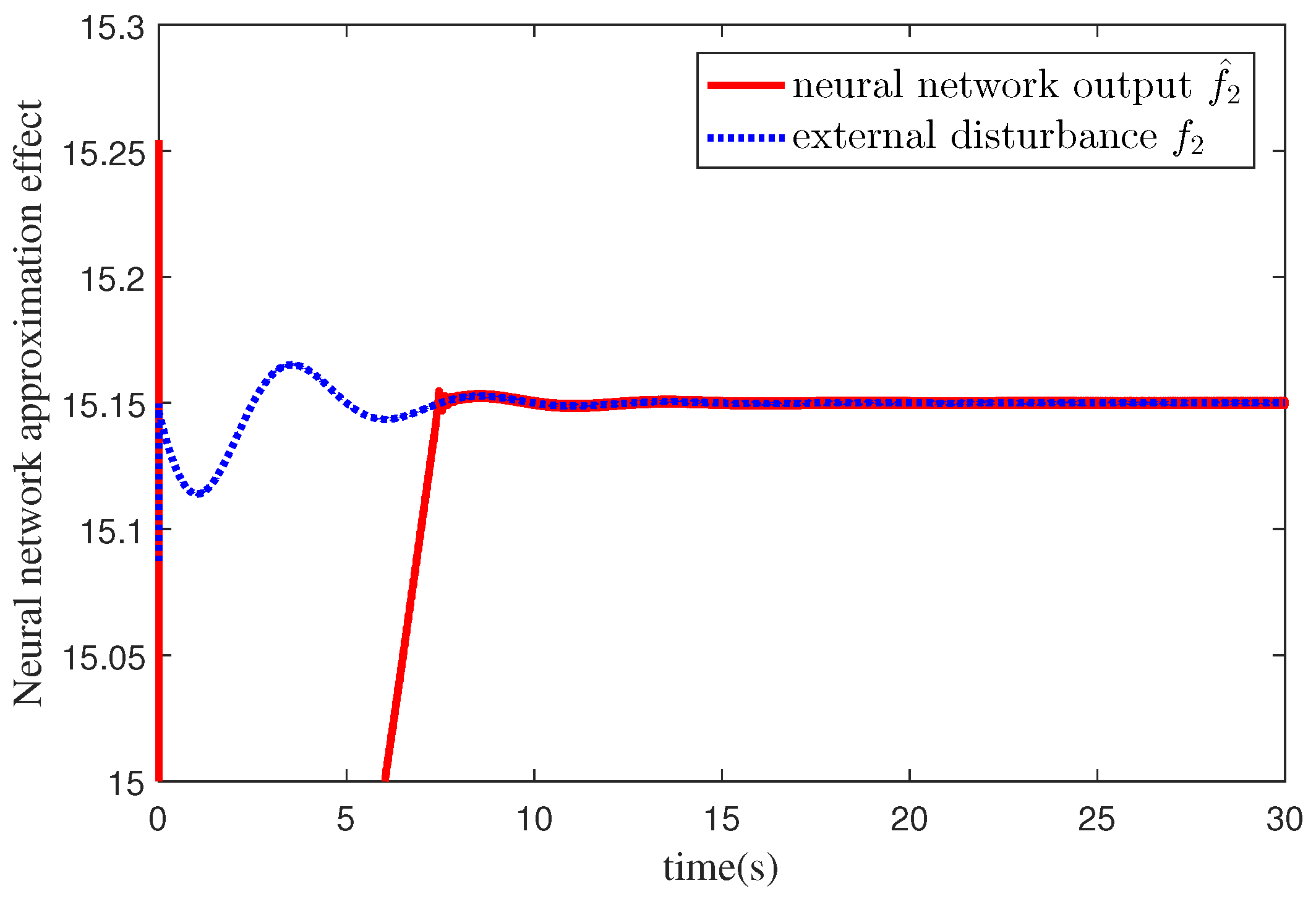
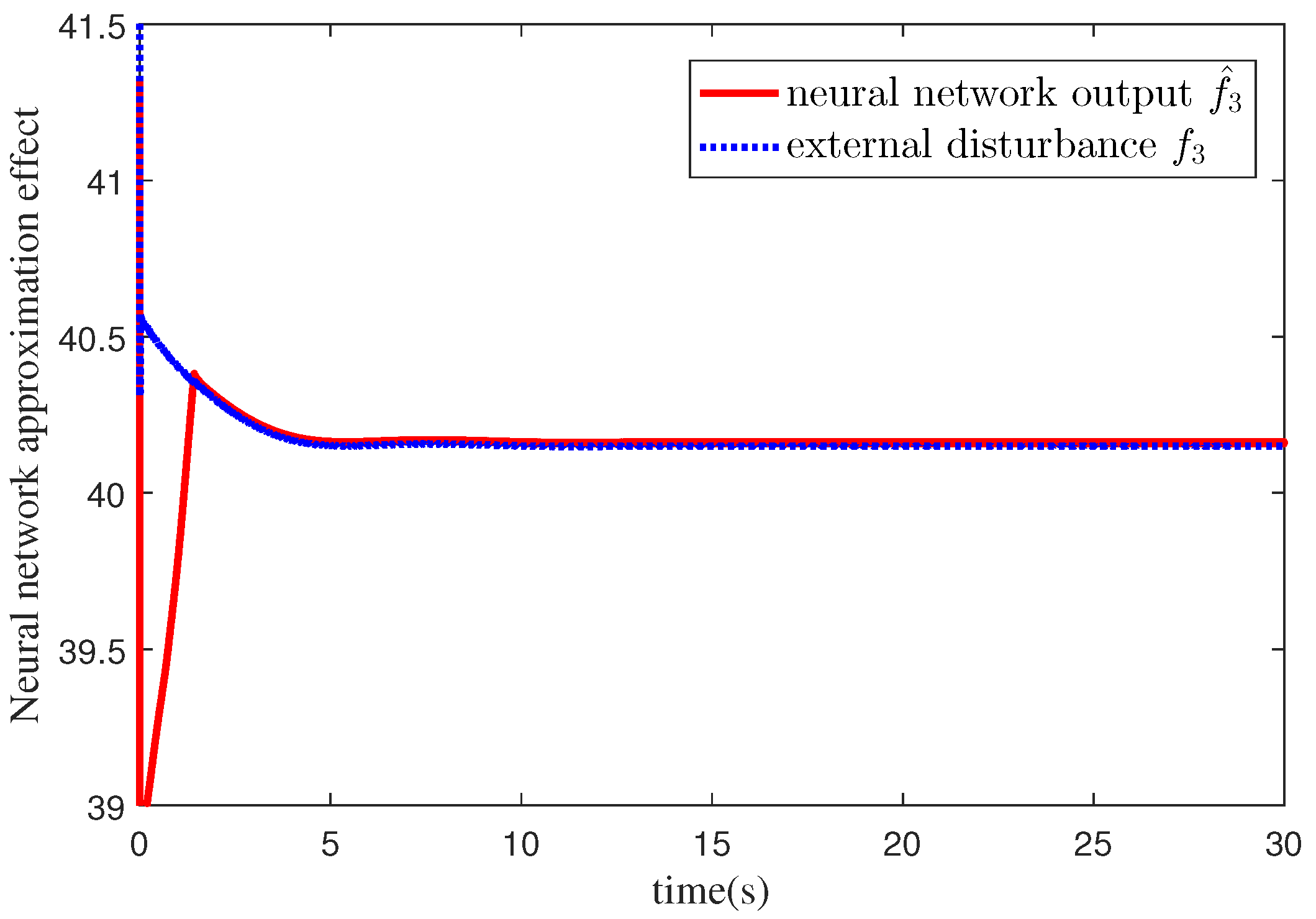
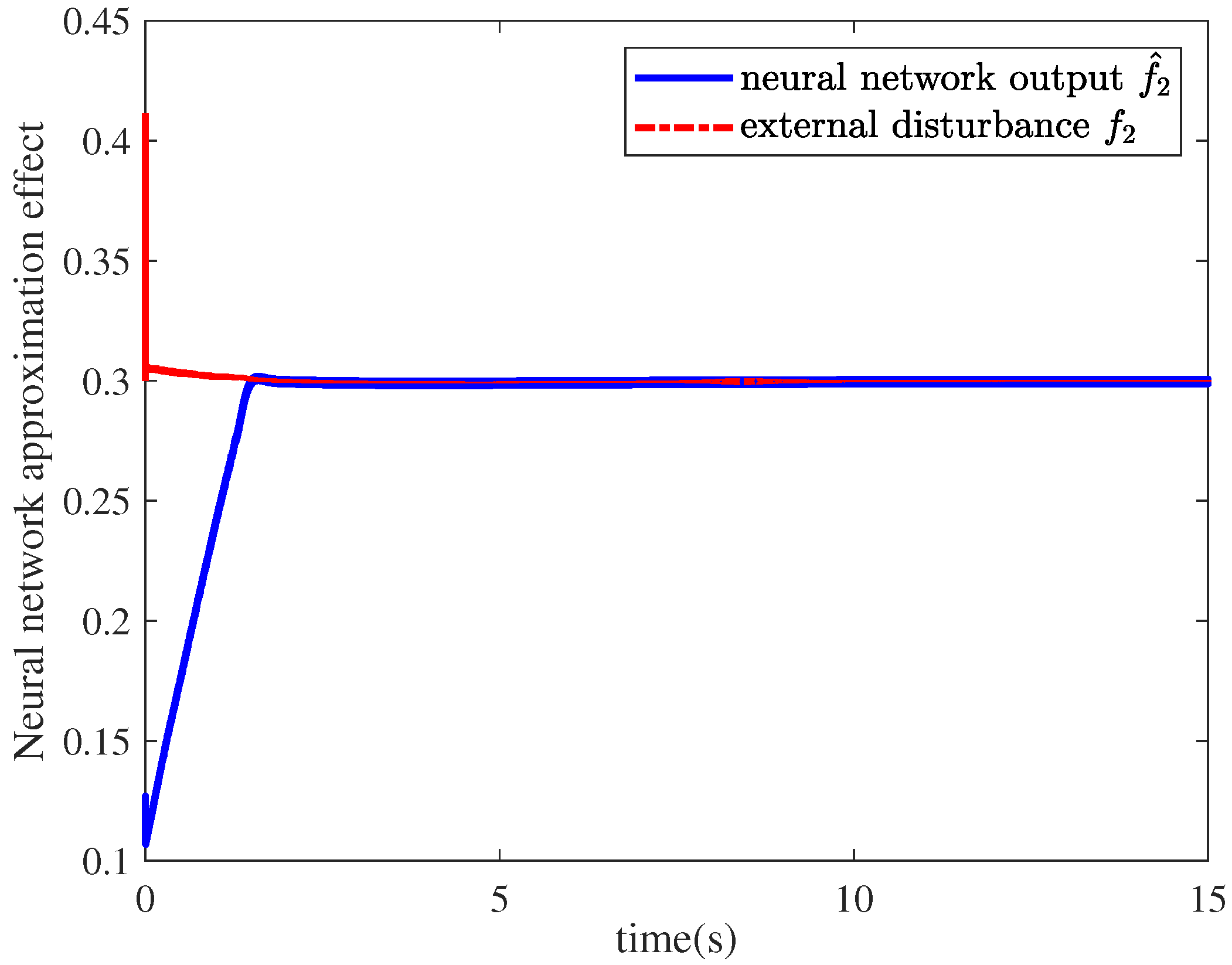
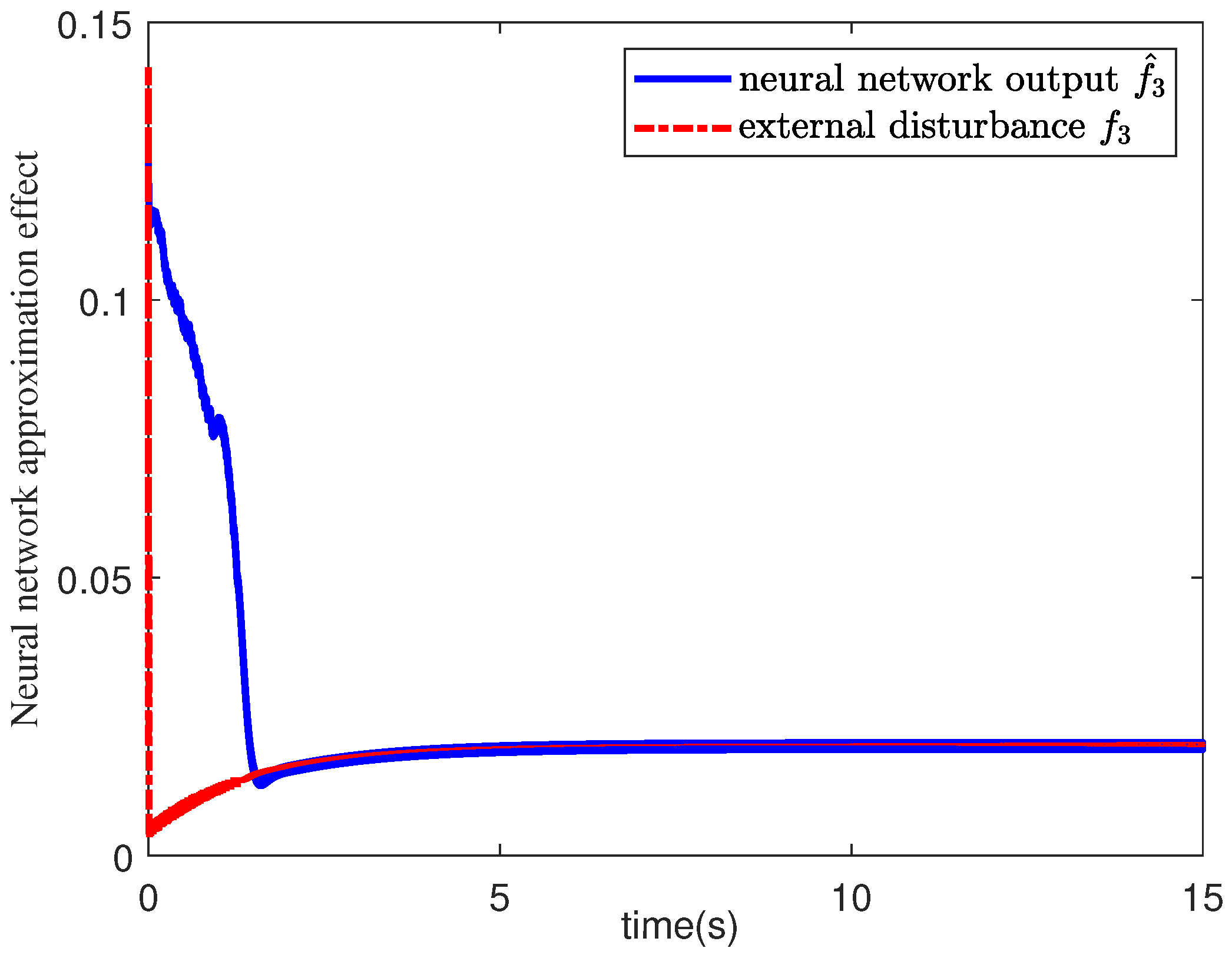
By the estimated external disturbance using radial basis function (RBF) neural network, the adaptive sliding mode controller is designed for ensuring all attitudes of the quadrotor UAVs can be driven to the proposed sliding surface and thus the attitude control is achieved. Finally, simulation result comparisons demonstrate the effectiveness and superiority of the proposed attitude control algorithm.
The remainder of this paper is organized as follows. In
Section 2, a system model of quadrotor UAVs is presented. In
Section 3, a sliding-mode attitude control design algorithm is presented, which includes the design of a sliding surface and the design of an adaptive sliding mode controller. In
Section 4, an illustrative simulation example is provided to demonstrate the effectiveness and superiority of the proposed method. Our conclusions are given in
Section 5.
2. System Model Description of Quadrotor UAV
The quadrotor UAV has a simple appearance and can take off and land vertically with high control flexibility. It consists of four electrical motors with propellers, which are attached to a rigid cross frame. Supposing the quadrotor UAV has a symmetrical structure, the drag and the thrust forces are proportional to the square of the rotors speed, and ignoring blade flapping and gyro effect, the linearized quadrotor UAV model is obtained from [
24,
25,
26]:
where
,
and
are the roll angle, pitch angle and yaw angle of the quadrotor UAV, respectively.
,
and
represent the moments of inertia of each axis of the UAV,
,
and
are the drag coefficients and are positive constants,
l represents the distance from the center of each rotor to the center of the body,
c is the proportional coefficient of force and torqu,
represent the control input to the quadrotor UAVs with
,
and
,
represents the lift of propeller. In addition,
,
and
represent unknown external disturbances and coupling terms.
Remark 1. If the unknown external disturbances and couplings are ignored, the attitude control model of the quadrotor UAVs can be described as follows. Research works based on model (
2) can be seen in [
27,
28,
29,
30,
31]. Clearly, the dynamic model (
1) in this paper is more suitable in practical situations than (
2).
Let
,
,
,
,
,
and
, the linearized quadrotor UAVs can be rewritten as
where
,
is the state variable of the
ith attitude control system,
and
are the system matrix and control input matrix, respectively.
Applying the delta operator technique to discretize the system (
3), one can find the quadrotor UAVs in the delta domain
where
is the delta operator calculation for the state variable
. It is defined mathematically as
where
,
T is the sampling period. Clearly, when
, the delta operator
is a derivative operation
and can be used to describe a continuous time dynamic system. When
, the delta operator
is a difference operation of traditional shift operator, which can be used to describe a traditional discrete time dynamical system. In terms of the definition of the delta operator, one can see that
,
,
.
For the control design of the quadrotor UAVs under the delta operator framework, it is assumed that the pair is controllable and that column is full rank, .
To facilitate the proof, the relevant lemmas are introduced. Lemma 1 shows the definition of the asymptotical stability in the delta domain, Lemma 2 and Lemma 3 will be used to the theoretical proof of Theorem 1, where Lemma 2 is used to the mathematical calculation of delta operator, and Lemma 3 is used as a technique to convert a nonlinear linear matrix inequality into a linear matrix inequality.
Lemma 1 ([
32]).
For the delta operator systemwhere with , is a linear or nonlinear function, if there exists a positive definite function in the delta domain, such that for any state satisfiesthen the system (6) is asymptotical stable in the delta domain. Lemma 2 ([
16]).
(Differentiation of Product). For any time functions and , we have the following fact. Lemma 3 ([
33]).
(Schur–Complement Lemma) For a given symmetric matrix , where , , , the inequalities (9)–(11) are equivalent to each other, 5. Conclusions
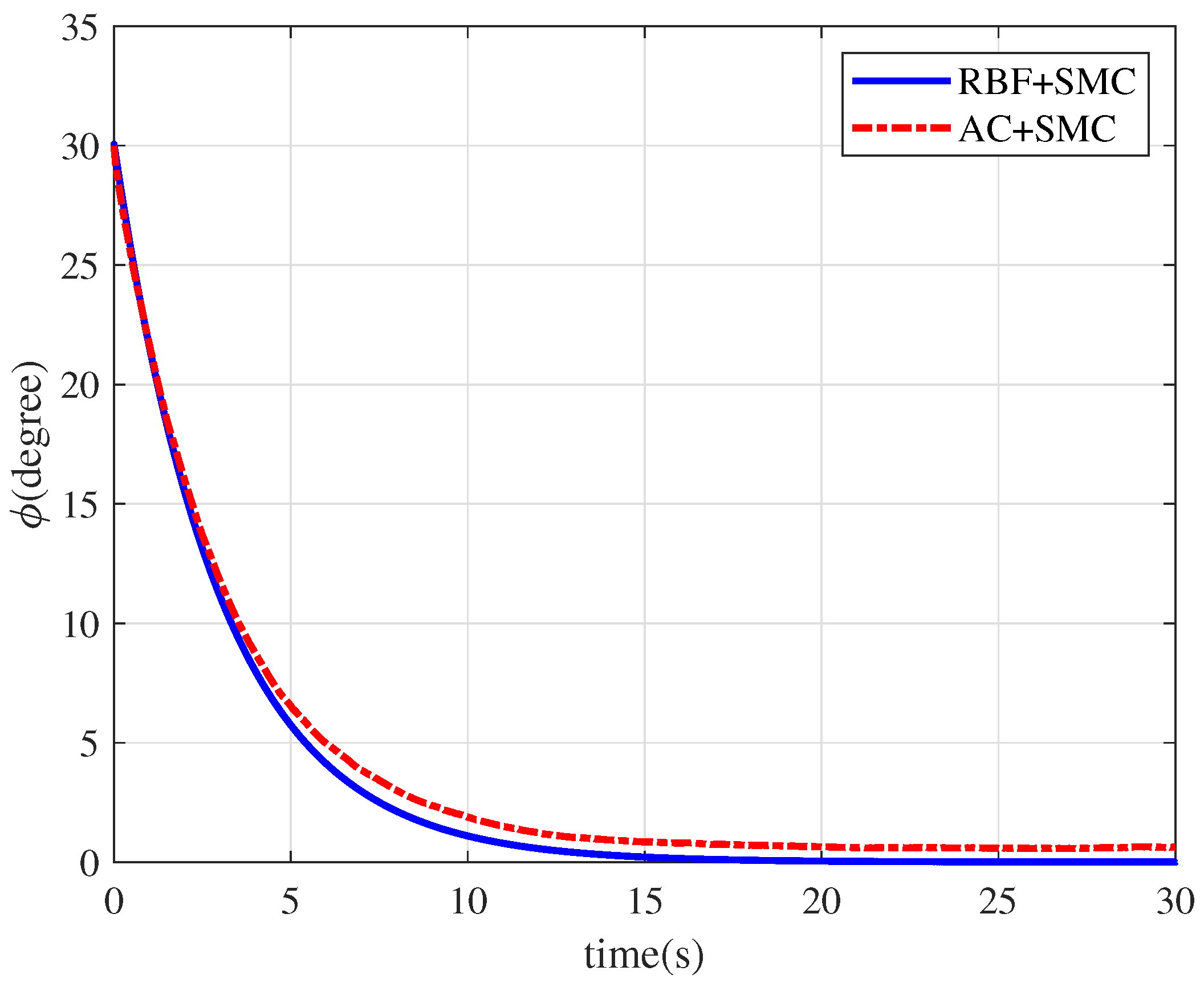
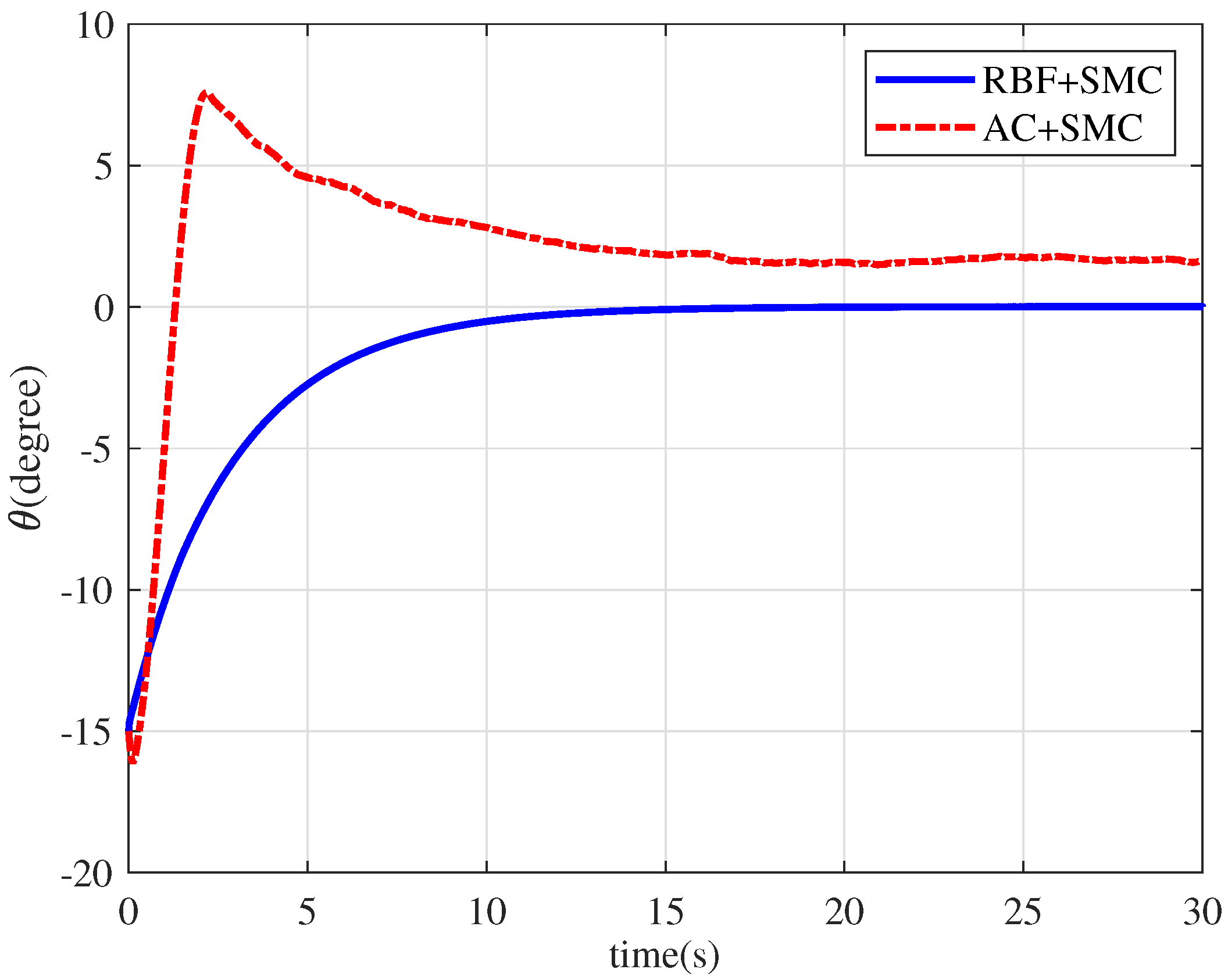
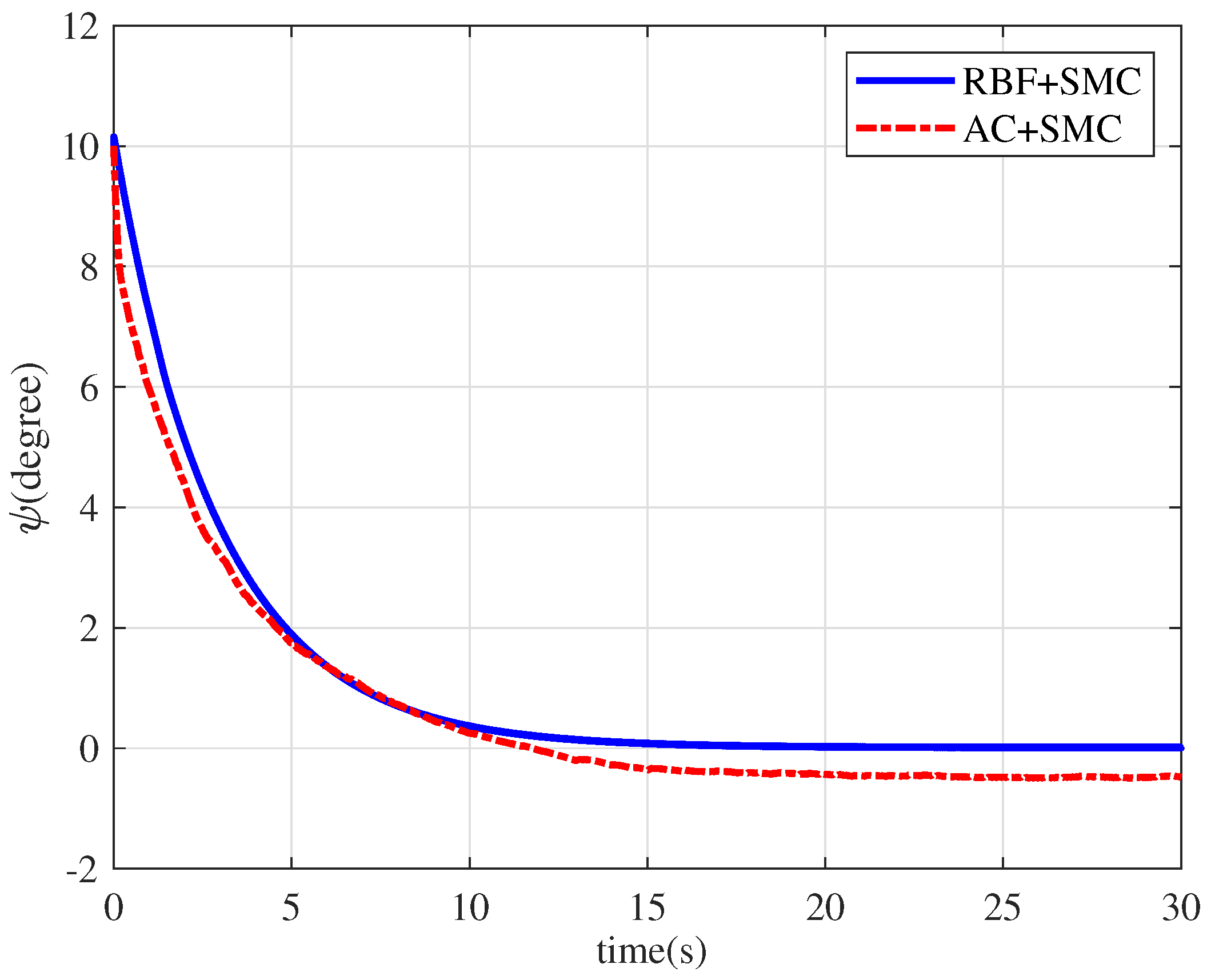
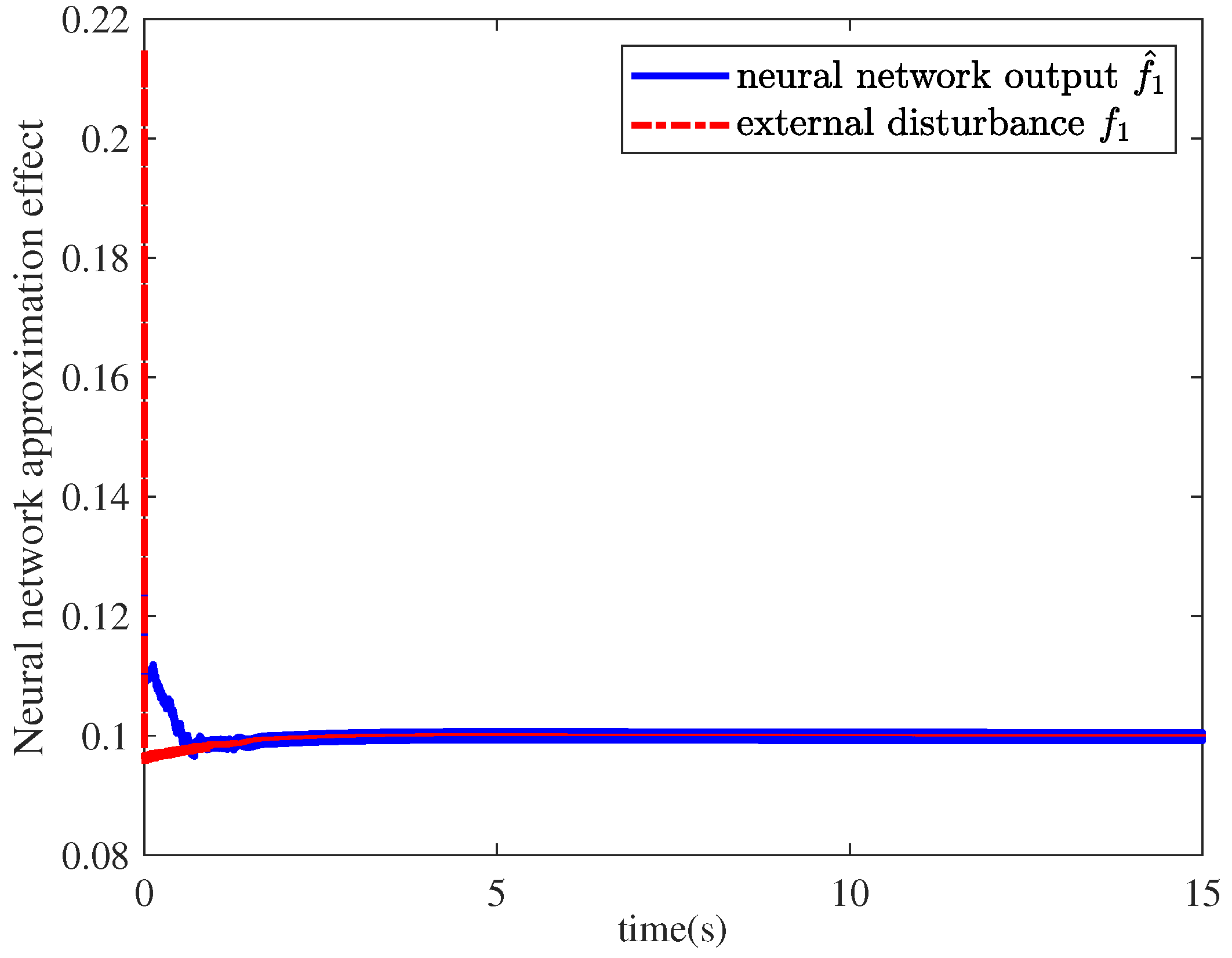
In this paper, we proposed an adaptive sliding-mode control algorithm in the delta domain for the attitude control of a quadrotor UAVs subject to external disturbances and couplings. First, the delta operator technique was used to discretize the attitude system of a quadrotor UAV. Then, a linear sliding surface, which can ensure the asymptotic stability of the sliding dynamics, was introduced in terms of the linear matrix inequality technique. Second, an adaptive sliding mode controller, using an RBF neural network to estimate external disturbances and couplings, was designed for the attitude reaching control.
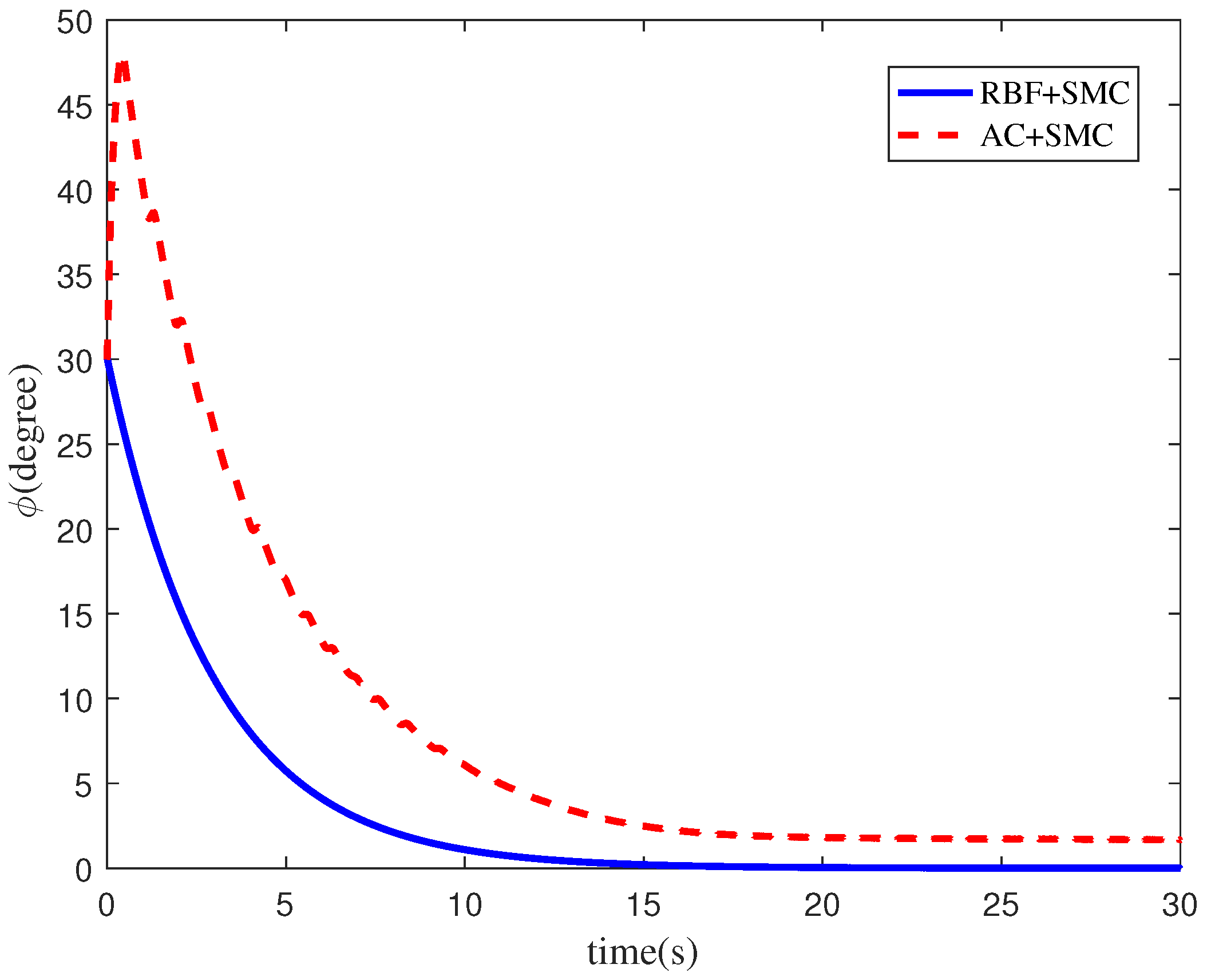
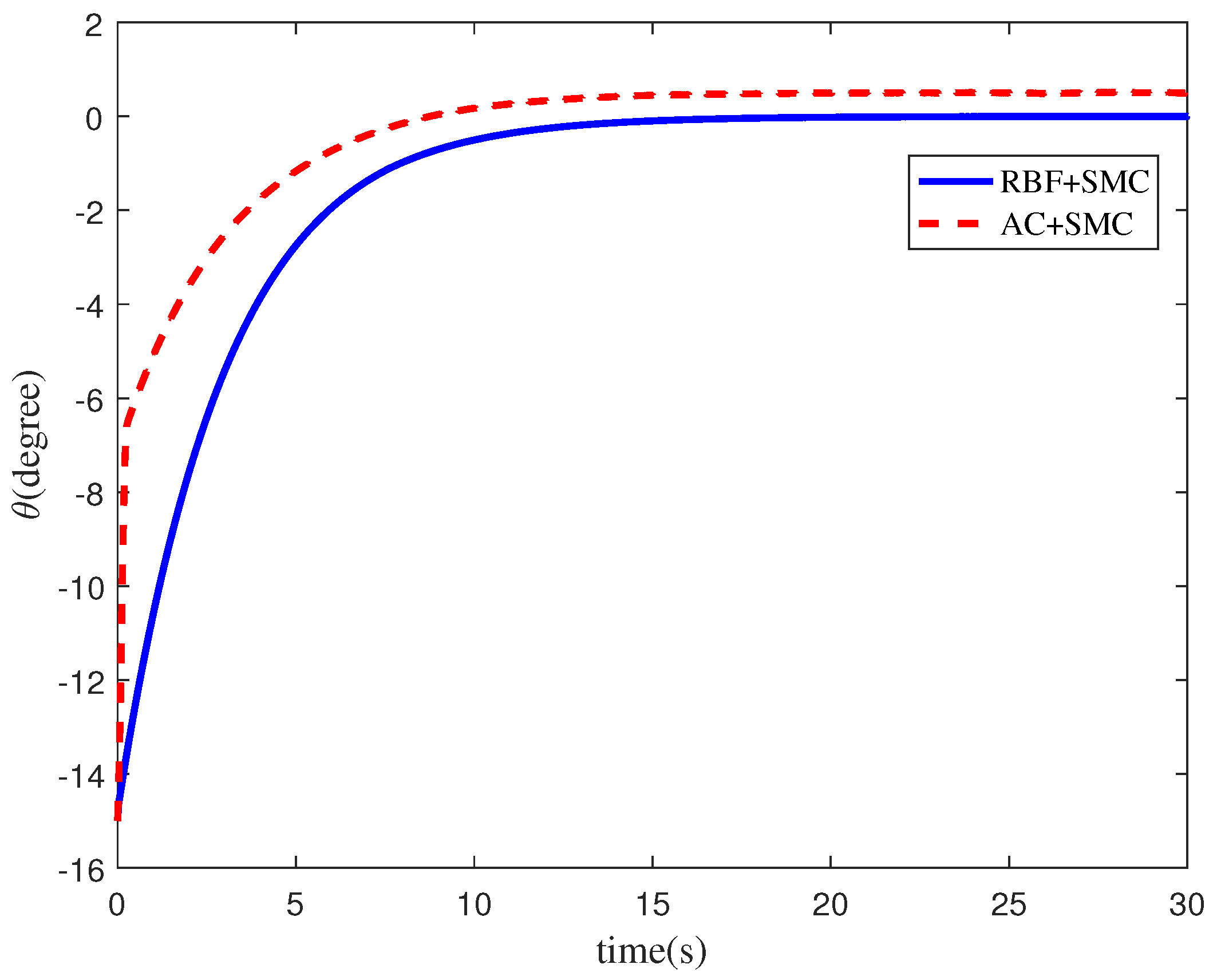
We demonstrated, via Lyapunov stability theory, that the controller guaranteed that all attitudes of the quadrotor UAVs could be driven to the designed sliding surface, and thus attitude control was achieved. Finally, simulation result comparisons verified the effectiveness and superiority of the proposed adaptive sliding-mode attitude control algorithm proposed in this paper. In our future research, how to apply the proposed theoretical method to an actual unmanned system will be our focus and will be studied in depth.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}