1. Introduction
In modern aeronautical and space technology, ensuring motion stability is often crucial for accident-free flight. In order to ensure the stability of oscillatory motions in modern aviation and space equipment, various symmetric and asymmetric designs of dampers, regulators and absorbers are widely used. In particular, in [
1], a new model of double friction between a shaft and dry friction damper with several steps of helicopter tail rotors is proposed. The dynamics of multiple vibration suppression, as well as static and dynamic misalignment, are analyzed to illustrate the accuracy of the model.
In [
2], an adaptive landing system for a reusable launch vehicle with semi-active control is proposed. This landing system allows the damping forces of the strut dampers to be adjusted by semi-actively controlled currents according to practical landing conditions. Meanwhile, simulation results show that the proposed semi-active landing system has better landing characteristics than existing counterparts using passive liquid or liquid cellular shock absorbers.
In [
3], symmetry is presented in the frame design, simulation and perturbation analysis of an on-board three-axis inertial-stabilized platform. A nonlinear dynamic model based on geographic coordinates is proposed to implement high-performance control of this platform, and a composite control method is proposed. The asymptotic stability of the composite control method is proved by the Lyapunov stability theory. The efficiency of the composite method is proved by a series of simulations and experiments. It is known that when transforming the thrust vector process of vertical and shortened takeoff or landing aircraft with symmetrical structure in the transition phase of takeoff and landing, there is a problem with coupling and redundancy of control variables.
In [
4], an appropriate inner loop stabilization controller and control distribution strategy were developed to solve this problem. Simulation results show that the applied controller tracks the reference input well and has good reliability in the presence of large parameter perturbation.
The paper [
5] investigates long-range retrograde stable orbits around Ganymede in order to use their dynamic characteristics in studies of the Jupiter system. In particular, the family of these retrograde orbits is calculated by numerical integration and numerical continuation. The results show that the strong stability of retrograde orbits allows us to observe Galilean satellites over long periods, and that higher-period orbits that branch out from retrograde orbits provide additional insight into the motion of probes approaching or moving away from the vicinity of these orbits.
The paper [
6] proposes an adaptive backstepping control strategy in a dynamic load simulator used to test the performance and stability of an aircraft’s executive system. An improved nonlinear friction model is applied to solve the electromechanical actuator force-tracking problem and concentrated perturbations are taken into account. In addition, the stability of the entire closed-loop system is demonstrated using Lyapunov’s method, and experiments are conducted to test the effectiveness of the developed algorithm.
In [
7], an equivalent method of the numerical prediction of ring damping for axial vibration in aircraft gas-turbine engines is proposed, which significantly reduces the calculation time and does not allow an analysis of the forced response of nonlinear structures. With the help of this method, the influence of ring damper design parameters on friction damping in transmissions during axial vibrations is studied.
The discussion of symmetry and stability issues in the operation of dampers in various fields of engineering goes far beyond the problems of aviation and space technology. In particular, [
8] proposes a negative speed cubic feedback controller for the suppression of nontrivial 1:3-order subharmonic resonance oscillations in a mass-damper-spring model. The application of the Krylov–Bogolubov averaging method allows us to approximate the equation of motion of the model and verify its stability.
In [
9], the primary frame structure and the damper are treated as analytical and experimental substructures, respectively. The analytical substructure is modeled using the finite element method. The effects of four dampers, a tuned liquid damper, a particle damper and a particle tuned mass damper on the frame are virtually investigated.
In [
10], a numerical method for predicting damping in transmissions with ring dampers is proposed. In this case, the nonlinear damping is expressed as an equivalent mechanical damping as a function of vibration stress when friction is taken into account.
Paper [
11] is devoted to obtaining approximate solutions of the controlled mass-damper-spring model using the harmonic balance method. In this work, the stability of the solutions is verified by the Floquet theory. A nonlinear saturation controller, a linear adjustable differential transformer and a linear servo-driven actuator were applied to suppress unwanted oscillations of the harmonic-excited vehicle.
In [
12], periodically distributed masses supported on a plate by coupling springs and dampers are considered. The partial differential equations and ordinary differential coupling equations for the system are derived and then transformed into unified ordinary differential equations for multi-mode coupling oscillations.
The paper [
13] presents an innovative approach to trajectory planning of mechanical systems using time reversal symmetry. In addition, this paper contains two case studies: a mass-spring-damper and an inverted pendulum on a bogie. The solution proposed in this paper compensates for the effects of time reversal symmetry relations by a special proposed measure.
In [
14], an alternative method for investigating the dynamics of a vibrating piping system containing a damping structure is proposed. The paper investigates the nonlinear dynamic properties of a two-point and symmetrically supported pipeline bracing system covered with a damping element using elastic porous metal rubber. The experimental results of this work showed good agreement with the predicted results obtained from the proposed dynamic model.
The study [
15] considers the optimal design of a tuned mass damper in the frequency domain to reduce the dynamic response of cantilever beams. In this case, the tuned mass damper is designed to reduce the response of the cantilever beam to dynamic impact.
The paper [
16] presents an analytical model for matrix simulation of forced vibrations of Euler–Bernoulli thin-walled bending–torsional deformation beam carrying an arbitrary number of spring and damper-mass subsystems with three degrees of freedom. The effect of the system parameters on the vibration transmission and vibration isolation properties of the thin-walled beam system was investigated.
In [
17], a design optimization method to improve the damping characteristics of a new damper with a bent magnetic circuit and a folded flux gap is described. Note that the multi-criteria optimization of the design parameters of this damper was performed based on the optimal design of the Latin hypercube, a neural network with an ellipsoidal basis function and multi-criteria particle swarm optimization.
In [
18], the optimization of a vibration-damping system for a railway bridge is considered. This damping system consists of a beam located under the bridge and connected to the slab by viscous dampers. The aim of the optimization process is to minimize the acceleration of the bridge while adding a vibration-damping system that is as light as possible.
In [
19], measures to mitigate shocks and prevent the overturning of curved bridges during an earthquake are discussed. The damping devices are visco-elastic dampers, viscous dampers and lead-rubber supports. Based on the principle of energy dissipation combined with constraints, three combined seismic mitigation options are defined.
In [
20], the beam-spring-damping support model is applied to the simulation of a two-span continuous-girder bridge in the study of the effects of a vertical near-fault earthquake. In this work, theoretical solutions for the contact force and displacement response of the bridge during vertical earthquake excitation near the fault are obtained.
Modern and classical methods for analyzing the stability of solutions of differential equations are used in modelling and studying the patterns of operation of dampers. Note that the modern theory of differential equations contains notions of strong and weak stability of solutions. The introduction of these notions allows us to effectively classify different types of solution stability. In addition, when solving some types of equations of mathematical physics, the notions of strong and weak resonances considered, in particular, in [
21,
22] are used.
In general cases, one should also talk separately about the external and internal stability of resonances in dynamical systems, modelling the perturbed motion of solids. The internal stability of resonances is considered, for example, in [
23,
24]. In these works, the stability of oscillations of mechanically coupled oscillators in small vicinity of resonances is analyzed. By contrast, the external stability of resonances describes the ability of resonances to be attractors, attracting system trajectories from nonresonant regions into asymptotically small resonance regions. In particular, [
25] investigates the outer resonance stability condition for the descent of a spacecraft with small asymmetry at small angles of attack in the Mars atmosphere. It should also be noted that in [
26] the fixed-time stabilization problem for a class of indefinite second-order nonlinear systems is considered. A new approach was developed that can be used to obtain a feedback controller together with an appropriate Lyapunov function such that the closed-loop system is stable at a fixed point in time.
The simultaneous investigation of signs of velocities and accelerations in the study of solid body motion that do not change their signs at the considered intervals of changes of one independent variable is a productive approach. Indeed, this approach can be effectively applied to analyze the evolutions of the required characteristics of motion without performing integration.
The aim of this paper is to develop a new qualitative method for analyzing the nonlinear monotonic simultaneous stability of the solution of a dynamical system of equations, containing two ordinary differential equations written in explicit form. The method formulated in the paper is based on the analysis of signs of the first and second derivatives of solutions to this system. It is assumed that the solutions of this system are defined and are twice continuously differentiable over the completely considered interval of change in the independent variable. Moreover, these solutions describe the nonlinear and monotone evolution of motion characteristics over the whole interval of variation of the independent variable. In this paper, concepts of monotonic upward or downward change in the curves of the convex angles under consideration that are more familiar from the mathematical point of view are applied instead of the notions of weak or strong stability.
The method under consideration is required to obtain all characteristic cases of nonlinear monotonic simultaneous stability of the solutions. It should be noted that, for certainty, it is assumed that the solution under study has no more than one inflection point over the entire interval of variation of the independent variable. In this paper, the formulated method is applied to investigate the simultaneous stability in the problem of nonlinear monotonic aerodynamic damping of the amplitude of the oscillations for the angle of attack and the gliding angle during the unguided descent of asymmetric spacecraft in the Mars atmosphere. As an example,
Figure 1 shows the “Mars Polar Lander”, a spacecraft designed to descend into the atmosphere of Mars [
27].
2. Method for Investigating Nonlinear Monotonic Simultaneous Stability in a System of Two Differential Equations
We consider a system of two differential equations of the following form:
where
and
are positive double continuously differentiable functions
, defined for the interval
;
and
are known continuously differentiable functions
, defined for the interval
.
In addition, let us introduce the following system of equations obtained by differentiating from the system of Equations (1) and (2):
Let us formulate the concept of nonlinear monotonic simultaneous stability of solutions and .
Let us assume that for positive solutions and of the system (1)–(2) the following conditions are satisfied:
- (i)
the functions and are defined for the interval ;
- (ii)
the functions
and are twice continuously differentiable for the interval ;
- (iii)
the derivatives
and keep their strong signs unchanged in open intervals t, formed by dividing the interval by inflection points . The number of inflection points is the same for functions and .
Let us formulate the following definition of simultaneous stability of the solutions and .
Definition 1 If positive solutionsandof the system (1)–(2) satisfy conditions (i)–(iii), and the solutions simultaneously decrease monotonically for the interval, then they are called nonlinear monotone stable solutions in both variables (NM2-stable solutions) for the interval.
Remark 1. In the case of nonlinear monotonic stability of the solutions and
, their simultaneous monotonic decrease occurs, which is realized with an increase in the independent variable t. In this case, intervals with the same direction of convexity of the graphs of the function and
are formed between the nearest inflection points of the graphs of the functions
and
. Obviously, if the derivatives and keep their strict signs unchanged in such intervals, then the graphs are curvilinear for these intervals. Therefore, the functions and are nonlinear for every open interval with the same direction of convexity.
Remark 2. In addition, with a monotonic decrease in functions , , a change in the direction of convexity is observed with each passage of an inflection point. Consequently, with nonlinear monotonic stability in both variables, there is a simultaneous monotonic decrease in the functions
and , accompanied by an alternate change in the directions of the convexity of their graphs. Obviously, the number of such changes in the directions of convexity is equal to the number of inflection points of the function graphs.
Theorem 1. (The sufficient condition for NM2 stability). If positive solutions and
of the system (1)–(2), satisfy conditions (i)–(iii), and their derivatives and , then the solutions and are NM2-stable for the interval.
Proof of Theorem 1. According to Definition 1, positive functions and have continuous first derivatives for the interval . If these derivatives and are negative, i.e., then these functions decrease in the interval . This conclusion follows from the fundamental sufficient condition for the function of one real variable to decrease. Thus, positive solutions and of the system (1)–(2) satisfy conditions (i)–(iii) and these solutions simultaneously decrease monotonically in the interval . Therefore, according to Definition 1, the solutions and are NM2-stable in the interval
The theorem has been proven. □
Thus, we will apply expressions for the first and second derivatives (1)–(2) and (3)–(4) in the analysis of NM2 stability.
Suppose that for the interval the following conditions are satisfied: the first derivatives simultaneously take negative values and , the second derivatives and retain their sign. The following theorem is true.
Theorem 2. If the following conditions are satisfied at :
(i) the first derivatives in the system of Equations (1) and (2) simultaneously take negative values and ;
(ii) the second derivatives and in the system of Equations (3) and (4) retain their sign, then there are only four different cases of the NM2 stability of the solutions
over the whole interval.
Proof of Theorem 2. Consider all characteristic cases of nonlinear monotonic stability of the solutions and obtained under conditions (i) and (ii).
Case 1. Let it be that at the conditions and are satisfied simultaneously. In this case we obtain the case of nonlinear monotonic simultaneous stability, where the monotonic decrease of the functions and is realized with constant upward convexity of the graphs of these functions.
Case 2. Let it be that at the conditions and are satisfied simultaneously. In this case we obtain the case of nonlinear monotonic simultaneous stability, in which the monotonic decrease of functions and is realized with constant convexity downwards of the graphs of these functions.
Case 3. Let it be that at the conditions and are satisfied simultaneously. We obtain the case of nonlinear monotonic simultaneous stability, in which a monotonic decrease of functions and is realized with constant upward convexity of the function graph and constant downward convexity of the function graph.
Case 4. Let it be that at the conditions and are satisfied simultaneously. We obtain the case of nonlinear monotonic simultaneous stability, in which a monotonic decrease of the functions and is realized with constant downward convexity of the function graph and constant upward convexity of the function graph.
There are no other cases of the NM2 stability of the solutions and for the system of Equations (1) and (2) at under the following conditions: the first derivatives simultaneously take negative values and ; the second derivatives and retain their sign.
The theorem is proved. □
Suppose that at the following conditions are met: the first derivatives simultaneously take negative values and , every second derivative and changes its sign to the opposite at one inflection point of the functions and , where the second derivatives are zero.
The following theorem is valid.
Theorem 3. If the following conditions are satisfied at:
(i) the first derivatives in the system of Equations (1) and (2) simultaneously take negative values and ;
(ii) every second derivative and in the system of Equations (3) and (4) reverses its sign at one inflection point of functions
and , in which the second derivatives are zero, then there are only four different cases of the NM2 stability of the solutions and over the whole interval
.
Proof of Theorem 3. Consider all characteristic cases of nonlinear monotonic stability of solutions x1(t), x2(t), obtained under conditions (i) and (ii).
Case 1. Suppose that at the conditions and are satisfied simultaneously. In this case, there is a monotonic decrease in the variable with a constant downward convexity (at ) for the initial interval. Then one inflection point of the curve is formed (at ). Thereafter, there is a monotonic decrease in with constant upward convexity (at ). In addition, there is a monotonic decrease in the variable with constant downward convexity in the initial interval (at ). A single inflection point of the curve (at ) is then formed. Thereafter, there is a monotonic decrease in with constant upward convexity (at ).
Case 2. Suppose that at the conditions and are satisfied simultaneously. In this case, there is a monotonic decrease in the variable with a constant upward convexity (at ) in the initial interval. Then one inflection point of the curve (at ) is formed. Thereafter, there is a monotonic decrease in with a constant downward convexity (at ). In addition, there is a monotonic decrease in the variable with constant upward convexity (at ) in the initial interval. A single inflection point of the curve (at ) is then formed. Thereafter, there is a monotonic decrease in with a constant downward convexity (at ).
Case 3. Suppose that at the conditions and are satisfied simultaneously. In this case, there is a monotonic decrease in the variable with a constant downward connexity (at ) in the initial interval. Then one inflection point of the curve (at ) is formed. Thereafter, there is a monotonic decrease in with constant upward connexity (at ). In addition, there is a monotonic decrease in the variable with constant upward connexity (at ) in the initial interval. Then one inflection point of the curve (at ). Thereafter, there is a monotonic decrease in with a constant downward connexity (at ).
Case 4. Suppose that at the conditions and are satisfied, simultaneously. In this case, there is a monotonic decrease in the variable in the initial interval with constant upward connexity (at ). Then one inflection point of the curve is formed (at ). Thereafter, there is a monotonic decrease in with a constant downward connexity (at ). In addition, there is a monotonic decrease in the variable with a constant downward connexity (at ). Then one inflection point of the curve (at ) is formed. Thereafter, there is a monotonic decrease in with constant upward connexity (at ).
There are no other cases of the NM2 stability of the solutions and of the system of Equations (1) and (2) at under the following conditions: the first derivatives simultaneously take negative values and ; the second derivatives and change their sign to the opposite one only at one inflection point of each function , in which the second derivatives are zero . The theorem is proved. □
Corollary 1. It follows from Theorem 2 and Theorem 3 that considering different combinations of signs of second derivatives and in the whole interval, under nonlinear monotone simultaneous stability of solutions and (at and ), both when the signs of second derivatives and over the whole interval are retained, and when changing signs of each second derivative and to the opposite only in one inflection point of functions and , we obtain sixteen cases of nonlinear monotonic stability of solutions.
Proof of the Corollary 1. Let us consider all characteristic cases of the NM2 stability of the solutions and of the system of Equations (1) and (2). From Theorem 2, it follows that there are four cases of the NM2 stability of these solutions. From Theorem 3, it follows that there are other four cases of the NM2 stability of these solutions. In addition, there are eight different combinations of signs of second derivatives resulting in eight cases of the NM2 stability of the solutions and , which do not coincide with the cases of Theorems 2 and 3. Indeed, consider two cases of monotone decreasing over the whole interval with different types of convexity and two cases of monotone decreasing function with a change of type of convexity at one point over the whole interval . In pairs, these four cases form four new cases of monotonic stability of solutions and . Similarly, consider two cases of monotone decreasing in the entire interval with different types of convexity and two cases of monotone decreasing function with a change in type of convexity at one point in the interval . In pairs, these four cases form another four new cases of monotonic stability of the solutions and . This yields a total of sixteen cases of the NM2 stability of the solutions and . There are no other cases of the NM2 stability of these solutions satisfying Corollary 1. The corollary is proved. □
Note 1. The number of cases in consequence 1 can also be calculated by applying combinations from combinatorics as follows:.
This formula assumes that the exponent is equal to the number of variables sought in the system (1), i.e., it is equal to two. The number four in the formula for the combination is equal to the number of different cases of the NM2 stability for each individual variable of the system (1) in the problem formulation considered in the corollary.
Note 2. In addition, if the number of inflection points does not exceed a finite number m , which is the same for both variables and , then the total number of different cases of the NM2 stability in system (1)–(2) is equal to .
Note 3. Note that each characteristic case of the NM2 stability obtained in Theorem 2 and Theorem 3 corresponds to another characteristic case of the NM2 stability.
These cases differ only in the sign of the second derivatives of each of the considered slow variables while preserving the sign of their first derivatives. In this sense, we should speak about the symmetry of characteristic cases of the NM2 stability.
3. Analysis of the Nonlinear Monotonic Simultaneous Stability of Motion of an Asymmetric Spacecraft in the Mars Atmosphere with Two Angles of Orientation
Consider the problem of the motion of an asymmetric spacecraft (SC) relative to the center of mass in the Mars atmosphere. In this case, we study the so-called quasi-static mode of nonresonant rotation of the spacecraft having a symmetry plane [
28]. In this case, the asymmetry of the spacecraft is reduced to the emergence of a small force
. According to the quasi-static mode, the angle of attack α takes both large and small values. In contrast, the gliding angle
takes only small values
, where
is the small parameter. Neglecting the influence of the gravitational force of the equation on the change in the angle of attack and the gliding angle, we obtain the following system of equations:
Here m is the mass of the spacecraft, V is the velocity of the spacecraft center of mass, is the small component of aerodynamic damping forces, , is the aerodynamic lifting force coefficient, q is the velocity head, S is the characteristic cross-sectional area of the spacecraft. The system of Equations (1) and (2) also assumes that the three components of the angular velocity of the spacecraft are known small quantities: , and . These components are directed along the axes of the coupled XYZ coordinate system. The assumption that the angular velocities are small is due to two reasons. First, the initial values of the angular velocities upon entering the Martian atmosphere are, as a rule, small. Secondly, the rarefaction of the upper and middle layers of the Martian atmosphere does not lead to these angular velocities reaching significant values due to the smallness of the aerodynamic moments. We will consider the situation when the angle of attack and the gliding angle change in radians within the following intervals .
The system of Equations (5) and (6) needs to be supplemented by three differential equations of motion of the spacecraft’s center of mass: the equation of change in velocity V(t), the equation of change in entrance angle ϑ(t), the equation of change in height H(t) and the equation for the force angle of roll γ(t). In addition, three differential equations must be included in this system to determine the angular velocities of the spacecraft’s motion [
28]. Assume that these three quantities of motion of the spacecraft’s center of mass, the differential equations for angular velocities of the spacecraft motion and the equation for the force angle of roll γ(t) are known. Equations (1) and (2) describe the change in these attitude angles of the spacecraft in the presence of a disturbance from the asymmetry of the spacecraft in the dynamic system and when taking into account the disturbance from a small aerodynamic lift force. Note that in Equations (1) and (2), the influence of the gravitational force on the motion of the spacecraft relative to the center of mass is neglected. This assumption is traditional in solving the problem of studying the motion of a spacecraft relative to the center of mass in the atmosphere [
28]. In this case, Equations (1) and (2) can be considered as a separate subsystem, independent of the force angle of roll.
Differentiating the equations of systems (5) and (6) under the assumption that the derivatives
are small, and considering only terms of the order of
, we obtain
Remark 3. In the technical problem under consideration, two first-order and two second-order derivatives are used to obtain the conditions for nonlinear monotone simultaneous stability of solutions of the system (5–8). From a technical point of view, the use of these first two derivatives is due to the fact that the first derivative determines the angular velocity, and the second derivative describes the behavior of the angular acceleration.
We apply the NM2 stability study method, described in
Section 2 in the problem of the motion of an asymmetric spacecraft relative to the center of mass in the Mars atmosphere.
Let the system of Equations (5) and (6) at meet the conditions of Theorem 2, i.e., at the following conditions are met: first derivatives in the system of Equations (5) and (6) simultaneously take negative values ; second derivatives keep their sign in the system of Equations (7) and (8). Hence, according to Theorem 2, there are only four different cases of the NM2 stability of the solutions β(t) and β(t) in the interval . These four cases are described in detail in the proof of Theorem 2.
If the conditions of Theorem 3 are met in the system of Equations (5) and (6), i.e., at , the following conditions are satisfied: the first derivatives in the system of Equations (5) and (6) simultaneously take negative values and ; every second derivative and in the system of Equations (7) and (8) changes its sign to the opposite at one inflection point of functions . Hence, according to Theorem 3, there are only four other different cases of the NM2 stability of solutions and for the interval . These four cases are described in detail in the proof of Theorem 3.
Further, we note that according to Corollary 1, it follows from Theorems 2 and 3 that considering different combinations of signs of second derivatives and for the interval under the NM2 stability of the solutions α(t) and β(t) (at and ), both when the signs of second derivatives and remain the same for the interval , and when we change the signs of each second derivative and to the opposite only at one inflection point of functions and we obtain sixteen cases of the NM2 stability of these solutions.
Note that when the values of the solutions α(t) and β(t) are becoming small, meeting the conditions of nonlinear monotonic simultaneous stability provides an orientation of the spacecraft such that the coupled axis Z of the vehicle is almost exactly directed along the velocity vector of the incoming flow . Such an orientation of the spacecraft allows overheating to be avoided for the equipment located on the parts of the structure that do not have a thermal protection coating. In addition, it is known that the Z-axis orientation along the velocity vector provides the conditions for accident-free deployment of the braking parachute system.
4. Numerical Results
We analyze some characteristic numerical results describing the nonlinear monotonic simultaneous stability of the angle of attack and the gliding angle during the descent of an asymmetric spacecraft in the Mars atmosphere. In doing so, we apply expressions (5)–(8) describing the variation of the first- and second-order derivatives of the angle of attack and gliding angle.
The mass-inertial characteristics of the landing spacecraft are as follows: the mass of the spacecraft is m = 550 kg, the length of the spacecraft is 1.4 m, the maximum cross-sectional area is S = 2.3 M
2. The magnitude of the aerodynamic lifting force coefficient
is similar to the numerical result given in [
29]. When modelling the characteristics of the Martian atmosphere, the results of [
30] were used.
In the process of numerical simulation, it was assumed that the presence of the last term on the right side of Equation (5) contributes to the aerodynamic damping of the angle of attack. During calculations, we assume that the values
and their derivatives are small functions, which decrease as the spacecraft descends. According to Equation (8), we assume that the term
, which determines the effect of asymmetry on the change in angle of attack, is small and constant.
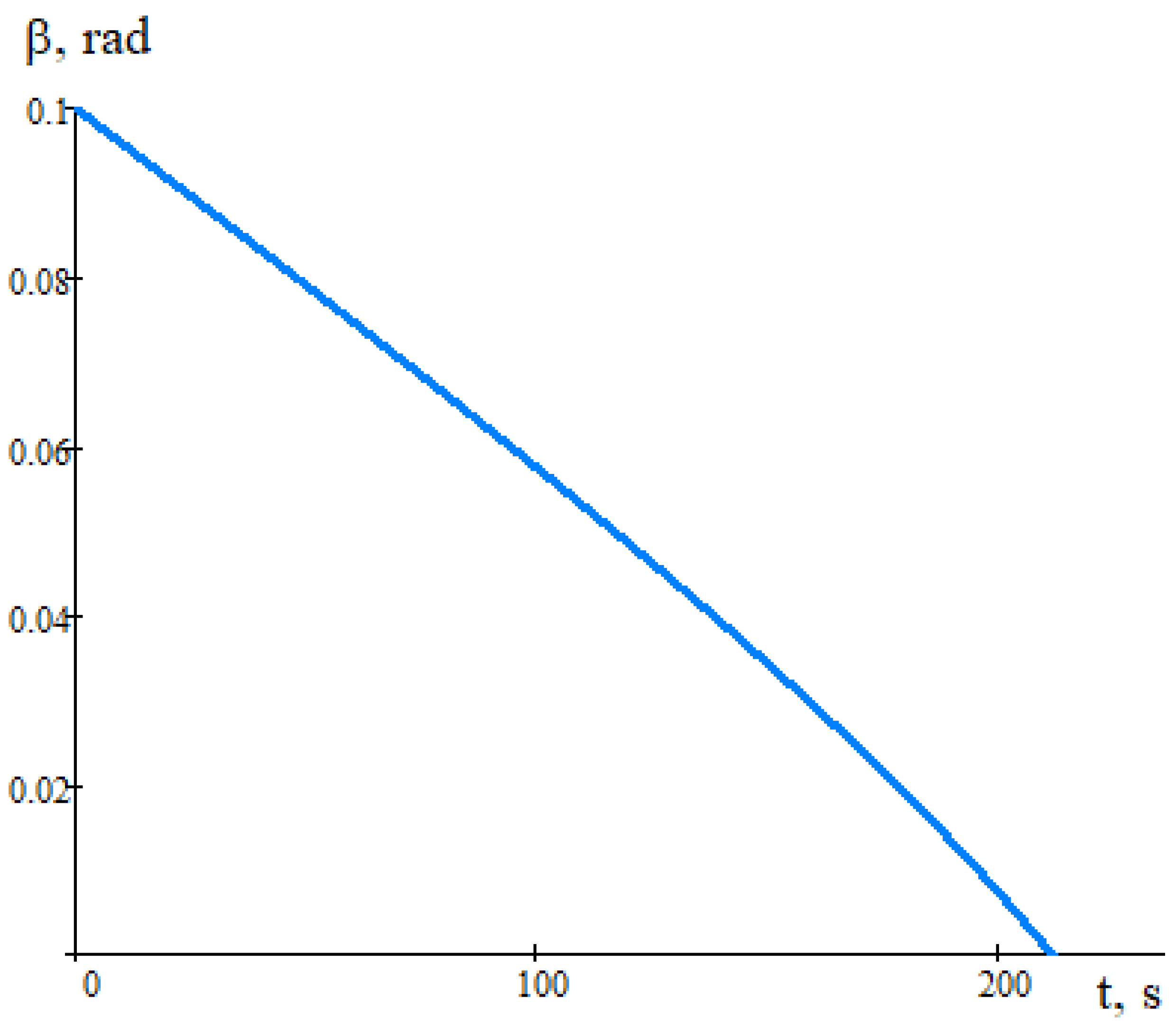
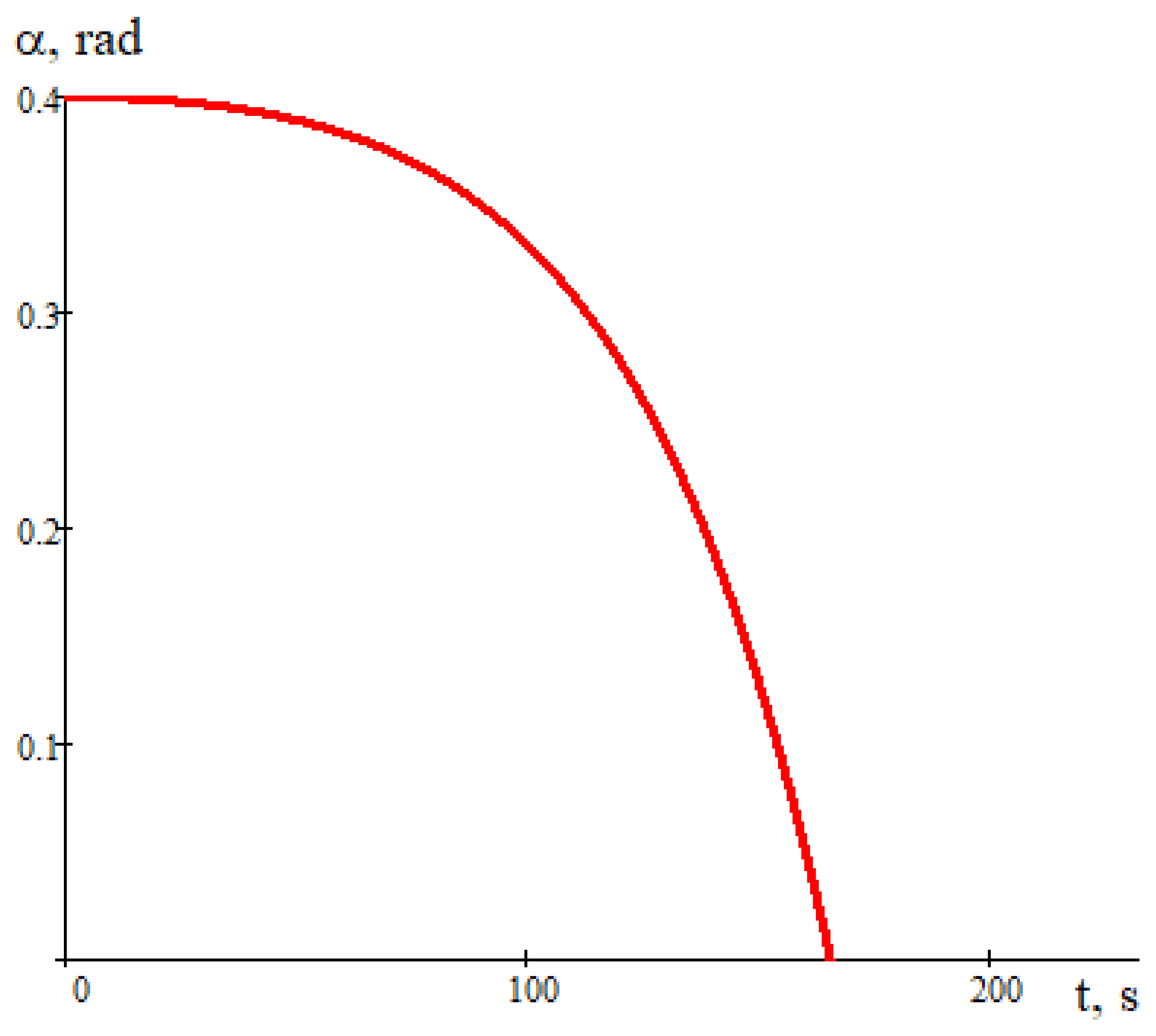
Figure 2 and
Figure 3 show typical numerical results demonstrating the variation of the angle of attack
and the gliding angle
when the NM2 stability conditions
,
,
and
are satisfied, simultaneously, during the unguided descent of an asymmetric spacecraft in the Mars atmosphere. These two figures show the case of simultaneous stability, which corresponds to case 1 in Theorem 2.
Indeed, it follows from
Figure 2 and
Figure 3 that the angle of attack and the gliding angle decrease simultaneously from their initial values to values close to zero for a time commensurate with the time of free motion of the asymmetric spacecraft in the Mars atmosphere. At the same time, the change of these angles is carried out with a constant upward convexity. In general, these numerical results demonstrate the fulfillment of functional restrictions on the values of these angles. As a result, accident-free operation of the braking parachute system is provided and the absence of overheating of on-board devices (at significant heating of external surfaces without thermal protection coating) is observed.
We consider separately the change in the angle of attack and the gliding angle during the descent of a symmetric spacecraft with similar mass-inertia characteristics in the Mars atmosphere.
Figure 4 shows that in the absence of asymmetry (at
), the decrease in the angle of attack is somewhat faster for the descent of an asymmetric spacecraft. The slight difference between the results shown in
Figure 2 and
Figure 4 is due to the fact that the gliding angle is small and changes slowly. It should be noted that the type of convexity in
Figure 2 and
Figure 4 is the same. Indeed, for a spacecraft with a small asymmetry and a spacecraft without asymmetry, the angle of attack decreases, describing a non-linear curve with an upward convexity.
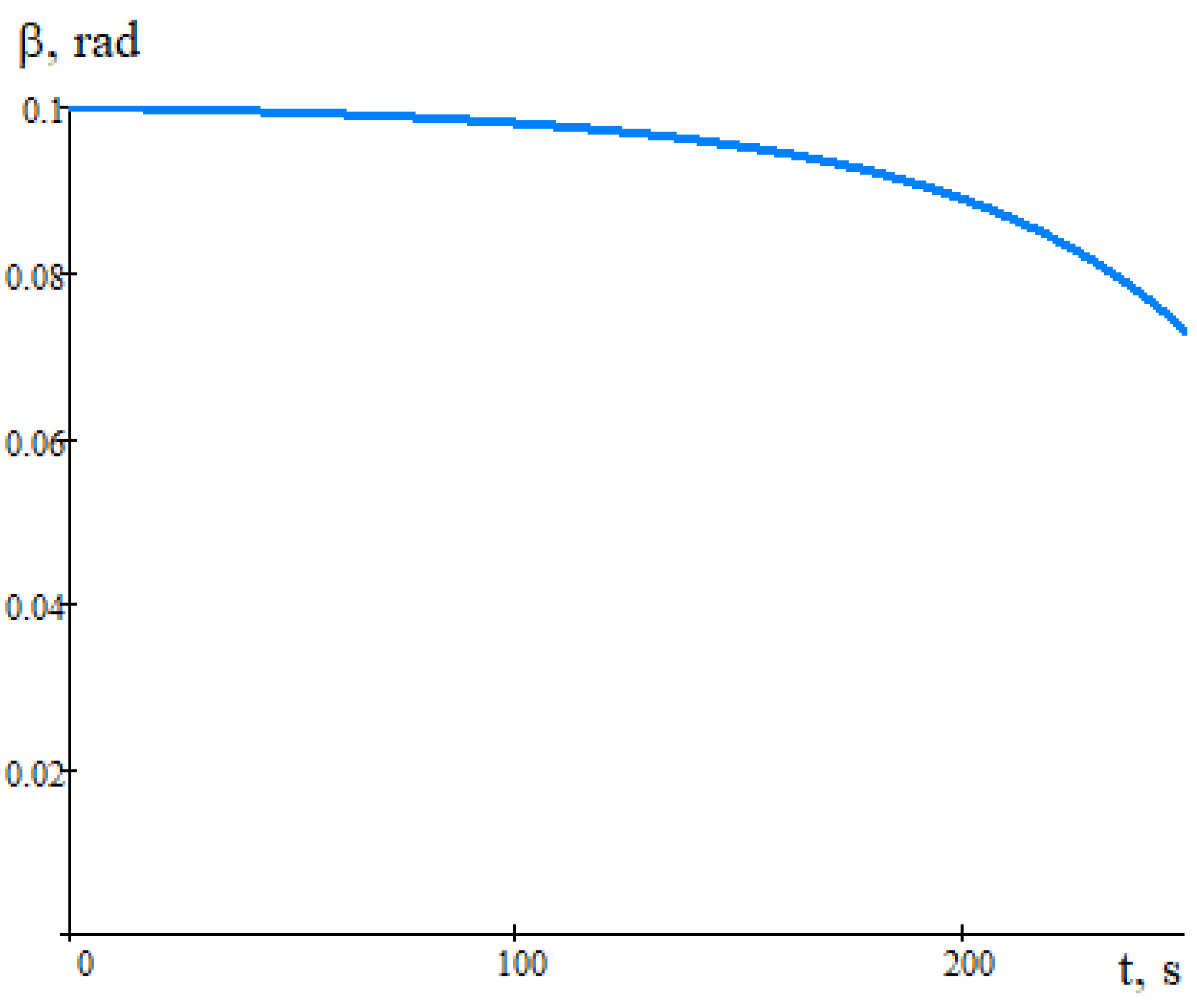
The
Figure 5 shows that in the absence of asymmetry, the gliding angle decreases more slowly than in the presence of asymmetry. However, the type of convexity in
Figure 3 and
Figure 5 is the same.
In terms of meeting the conditions of the NM2 stability here, in the absence of asymmetry, the conditions , , and are also satisfied, simultaneously. Hence, the simultaneous stability of these angles corresponding to case 1 in Theorem 2 is also realized here.
The numerical results show that the situation with the presence of asymmetry on board the spacecraft is preferable to the absence of asymmetry. Indeed, in the presence of asymmetry and aerodynamic damping, both the gliding angle and the angle of attack reach values close to zero. Therefore, it is in this case that overheating of the internal equipment or an emergency situation when opening the lines of the parachute system should not be expected.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




