

Ulam Stability of Fractional Hybrid Sequential Integro-Differential Equations with Existence and Uniqueness Theory
Abstract
:1. Introduction
2. Preliminaries
- (c1)
- The operator is contractive;
- (c2)
- The operator is compact;
- (c3)
- The function ξ is of the form such that, for all , it implies that .
3. Symmetry Analysis of Fractional Differential Equations
3.1. Symmetry Analysis of Time-Fractional Boundary Value Problems
3.2. Symmetry Analysis of HFSID
- whenever ;
- whenever ;
- whenever .
- u= v(x, t) satisfies Equation (sym1);
- u = v(x, t) is an invariance surface under X.
4. Solution and Existence of HFSID
- The continuous functions , g are defined as and . Further, suppose that has positive functions , , and , respectively, with bounds , , and . These positive functions are restricted as
- For the real number , we can deriveand
5. Stability Analysis of Boundary Value Problems
6. Example
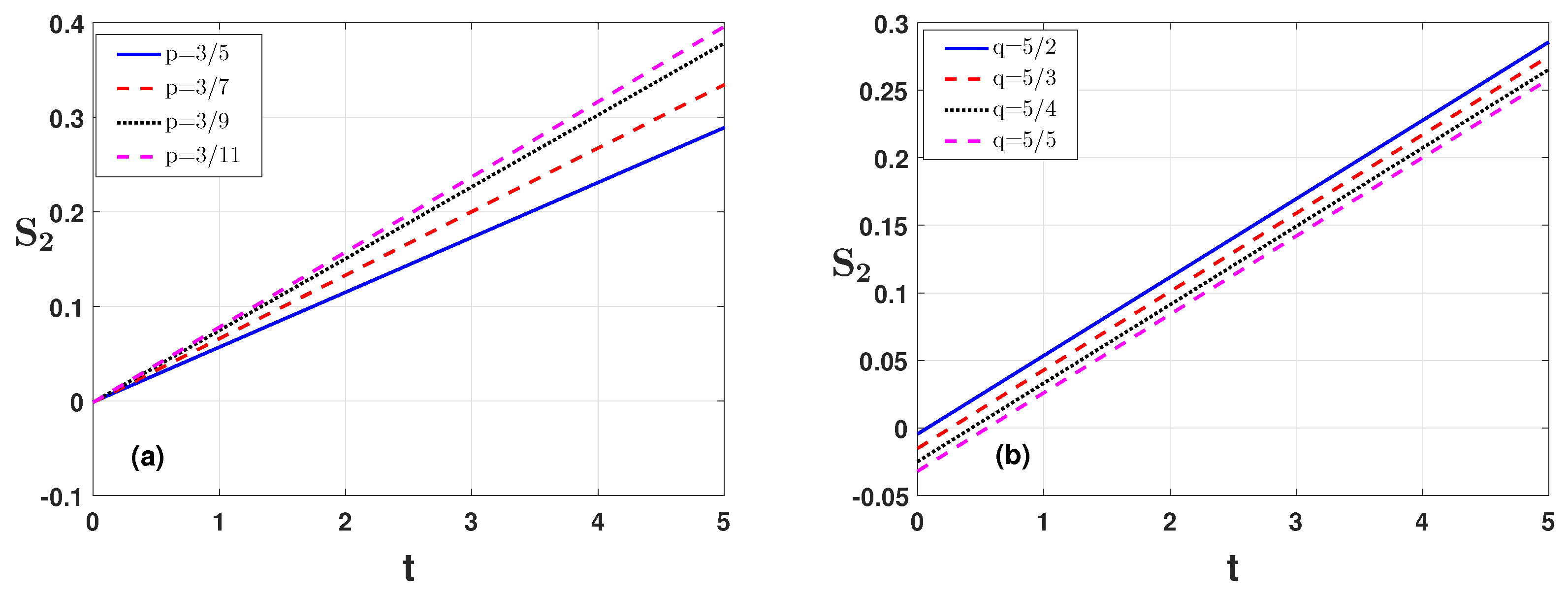
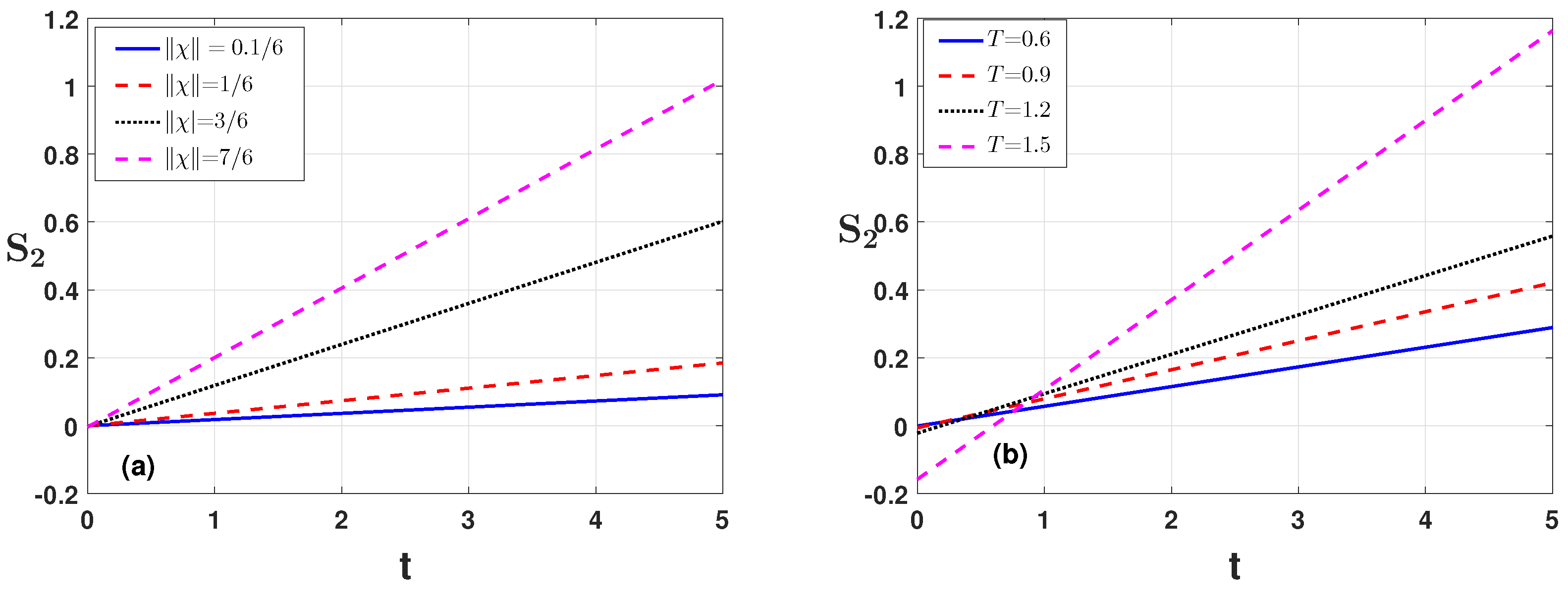
7. Numerical Discussion
8. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematics Studies; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Lakshmikantham, V.; Leela, S.; Vasundhara Devi, J. Theory of Fractional Dynamic Systems; Cambridge Academic Publishers: Cambridge, UK, 2009. [Google Scholar]
- Yasmin, H.; Iqbal, N.A. Comparative Study of the Fractional Coupled Burgers and Hirota–Satsuma KdV Equations via Analytical Techniques. Symmetry 2022, 14, 1364. [Google Scholar] [CrossRef]
- Shah, N.; Alyousef, H.; El-Tantawy, S.; Shah, R.; Chung, J. Analytical Investigation of Fractional-Order Korteweg-De-Vries-Type Equations under Atangana-Baleanu-Caputo Operator: Modeling Nonlinear Waves in a Plasma and Fluid. Symmetry 2022, 14, 739. [Google Scholar] [CrossRef]
- Irina, A.; Koresheva, E. Estimation of the FST-Layering Time for Shock Ignition ICF Targets. Symmetry 2022, 14, 1322. [Google Scholar]
- Gulaly, S.; Ali, A.; Ahmad, S.; Nonlaopon, K.; Akgül, A. Bright Soliton Behaviours of Fractal Fractional Nonlinear Good Boussinesq Equation with Nonsingular Kernels. Symmetry 2022, 14, 2113. [Google Scholar]
- Pruchnicki, E. Two New Models for Dynamic Linear Elastic Beams and Simplifications for Double Symmetric Cross-Sections. Symmetry 2022, 14, 1093. [Google Scholar] [CrossRef]
- Candan, M. Some Characteristics of Matrix Operators on Generalized Fibonacci Weighted Difference Sequence Space. Symmetry 2022, 14, 1283. [Google Scholar] [CrossRef]
- Ali, A.; Khan, A.U.; Algahtani, O.; Saifullah, S. Semi-analytical and numerical computation of fractal-fractional sine-Gordon equation with non-singular kernels. AIMS Math. 2022, 7, 14975–14990. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Sabatier, J.; Agrawal, O.P.; Machado, J.A.T. (Eds.) Advances in Fractional Calculus: Theoretical Developments and Applications in Physics and Engineering; Springer: Dordrecht, Germany, 2007. [Google Scholar]
- Odibat, Z.M. Computing eigenelements of boundary value problems with fractional derivatives. Appl. Math. Comput. 2009, 215, 3017–3028. [Google Scholar] [CrossRef]
- Stojanović, M. Numerical method for solving diffusion-wave phenomena. J. Comput. Appl. Math. 2011, 235, 3121–3137. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Sun, S.; Han, Z.; Li, Q. Theory of fractional hybrid differential equations. Comput. Math. Appl. 2011, 62, 1312–1324. [Google Scholar] [CrossRef] [Green Version]
- Sun, S.; Zhao, Y.; Han, Z.; Li, Y. The existence of solutions for boundary value problem of fractional hybrid differential equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4961–4967. [Google Scholar] [CrossRef]
- Ahmad, B.; Ntouyas, S.K. An existence theorem for fractional hybrid differential inclusions of Hadamard type with Dirichlet boundary conditions. Abstr. Appl. Anal. 2014, 2014, 705809. [Google Scholar] [CrossRef]
- Dhage, B.C.; Ntouyas, S.K. Existence results for boundary value problems for fractional hybrid differential inclusions. Topol. Methods Nonlinear Anal. 2014, 44, 229–238. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, Y. Existence of solutions to boundary value problem of a class of nonlinear fractional differential equations. Adv. Differ. Equ. 2014, 174, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Miller, K.S.; Ross, B. An Introduction to Fractional Calculus and Fractional Differential Equations; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Wei, Z.; Dong, W. Periodic boundary value problems for Riemann–Liouville sequential fractional differential equations. Electron. J. Qual. Theory Differ. Equ. 2011, 87, 1–13. [Google Scholar] [CrossRef]
- Wei, Z.; Li, Q.; Che, J. Initial value problems for fractional differential equations involving Riemann–Liouville sequential fractional derivative. J. Math. Anal. Appl. 2010, 367, 260–272. [Google Scholar] [CrossRef] [Green Version]
- Hyers, D.H. On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 1941, 27, 222–224. [Google Scholar] [CrossRef] [Green Version]
- Jung, S.M. On the Hyers–Ulam stability of the functional equations that have the quadratic property. J. Math. Anal. Appl. 1998, 222, 126–137. [Google Scholar] [CrossRef] [Green Version]
- Jung, S.M. Hyers–Ulam stability of linear differential equations of first order II. Appl. Math. Lett. 2006, 19, 854–858. [Google Scholar] [CrossRef] [Green Version]
- Obloza, M. Hyers stability of the linear differential equation. Rocz. Nauk Dydakt. Prace Mat. 1993, 13, 259–270. [Google Scholar]
- Dhage, B.C.; Lakshmikantham, V. Basic results on hybrid differential equations. Nonlinear Anal. 2010, 4, 414–424. [Google Scholar] [CrossRef]
- Shete, A.Y.; Bapurao, C.D.; Namdev, S.J. Differential inequalities for a finite system of hybrid Caputo fractional differential equations. Adv. Inequal. Appl. 2014, 2014, 35. [Google Scholar]
- Jamil, M.; Khan, R.A.; Shah, K. Existence theory to a class of boundary value problems of hybrid fractional sequential integro-differential equations. Bound. Value Probl. 2019, 1, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Khan, R.A.; Shah, K. Existence and uniqueness of solutions to fractional order multi-point boundary value problems. Commun. Appl. Anal. 2015, 19, 515–526. [Google Scholar]
- Rus, I.A. Ulam stabilities of ordinary differential equations in a Banach space. Carpathian J. Math. 2010, 26, 103–107. [Google Scholar]
- Sabirova, R. Fractional differential equations: Change of variables and nonlocal symmetries. J. Math. Probl. Equ. Stat. 2021, 2, 44–59. [Google Scholar]
- Gul, Z.; Ali, A. Localized modes in a variety of driven long Josephson junctions with phase shifts. Nonlinear Dyn. 2018, 94, 229–247. [Google Scholar] [CrossRef]
- Zhang, L.; ur Rahman, M.; Arfan, M.; Ali, A. Investigation of mathematical model of transmission co-infection TB in HIV community with a non-singular kernel. Results Phys. 2021, 28, 104559. [Google Scholar] [CrossRef]
- Din, Z.U.; Ali, A.; De la Sen, M.; Zaman, G. Entropy generation from convective–radiative moving exponential porous fins with variable thermal conductivity and internal heat generations. Sci. Rep. 2022, 12, 1791. [Google Scholar]
- Din, Z.U.; Ali, A.; Ullah, S.; Zaman, G.; Shah, K. and Mlaiki, N. Investigation of heat transfer from convective and radiative stretching/shrinking rectangular fins. Math. Probl. Eng. 2022, 2022. [Google Scholar] [CrossRef]
- Khan, K.; Algahtani, O.; Irfan, M.; Ali, A. Electron-acoustic solitary potential in nonextensive streaming plasma. Sci. Rep. 2022, 12, 15175. [Google Scholar] [CrossRef] [PubMed]
- Khan, K.; Ali, A.; Irfan, M.; Algahtani, O. Time-fractional electron-acoustic shocks in magnetoplasma with superthermal electrons. Alex. Eng. J. 2022. [Google Scholar] [CrossRef]
- Khan, W.A.; Ali, A.; Gul, Z.; Ahmad, A.; Ullah, A. Localized modes in PT-symmetric sine-Gordon couplers with phase shift. Chaos Solitons Fractals 2020, 139, 110290. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | |||||
|---|---|---|---|---|---|
| 0.0 | 0.193696 | 0.533696 | 0.793696 | 0.993696 | 1.193696 |
| 0.2 | 0.533696 | 0.55369 | 0.733696 | 0.835696 | 1.543696 |
| 0.4 | 0.835696 | 0.855696 | 0.875696 | 0.835696 | 1.435696 |
| 0.6 | 0.635696 | 0.735696 | 0.935696 | 0.933696 | 1.535696 |
| 0.8 | 0.535696 | 0.835696 | 0.935696 | 0.9835696 | 1.363596 |
| 1.0 | 0.935696 | 0.9355696 | 0.935696 | 1.935696 | 1.936962 |
| t | |||||
|---|---|---|---|---|---|
| 0.0 | 0.093696 | 0.433696 | 0.693696 | 0.893696 | 1.193696 |
| 0.2 | 0.433696 | 0.653694 | 0.933696 | 0.835666 | 1.543696 |
| 0.4 | 0.435696 | 0.755696 | 0.955696 | 0.985636 | 1.673696 |
| 0.6 | 0.735696 | 0.835696 | 0.935696 | 0.973696 | 1.835696 |
| 0.8 | 0.535396 | 0.835396 | 0.935396 | 0.983366 | 1.363396 |
| 1.0 | 0.735396 | 0.833566 | 0.975636 | 1.985636 | 1.736932 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Algahtani, O. Ulam Stability of Fractional Hybrid Sequential Integro-Differential Equations with Existence and Uniqueness Theory. Symmetry 2022, 14, 2438. https://doi.org/10.3390/sym14112438
Algahtani O. Ulam Stability of Fractional Hybrid Sequential Integro-Differential Equations with Existence and Uniqueness Theory. Symmetry. 2022; 14(11):2438. https://doi.org/10.3390/sym14112438
Chicago/Turabian StyleAlgahtani, Obaid. 2022. "Ulam Stability of Fractional Hybrid Sequential Integro-Differential Equations with Existence and Uniqueness Theory" Symmetry 14, no. 11: 2438. https://doi.org/10.3390/sym14112438