
Perturbed Newton Methods for Solving Nonlinear Equations with Applications



Abstract
:1. Introduction
2. Ball Comparison
- (i)
- has a minimal zero for function that is non-decreasing and continuous. Set .
- (ii)
- has a minimal zero , where function is non-decreasing and continuous and is defined by
- (iii)
- have minimal zeros and , respectively, where is non-decreasing and continuous, and is defined bySet and .
- (iv)
- has a minimal zero , where is defined byThen, parameter d is defined bywhich shall be shown to be a convergence radius for KLMF. Set .
- for each . Set .
- andfor each .
- for some to be given the latter.
- There exists satisfyingSet .
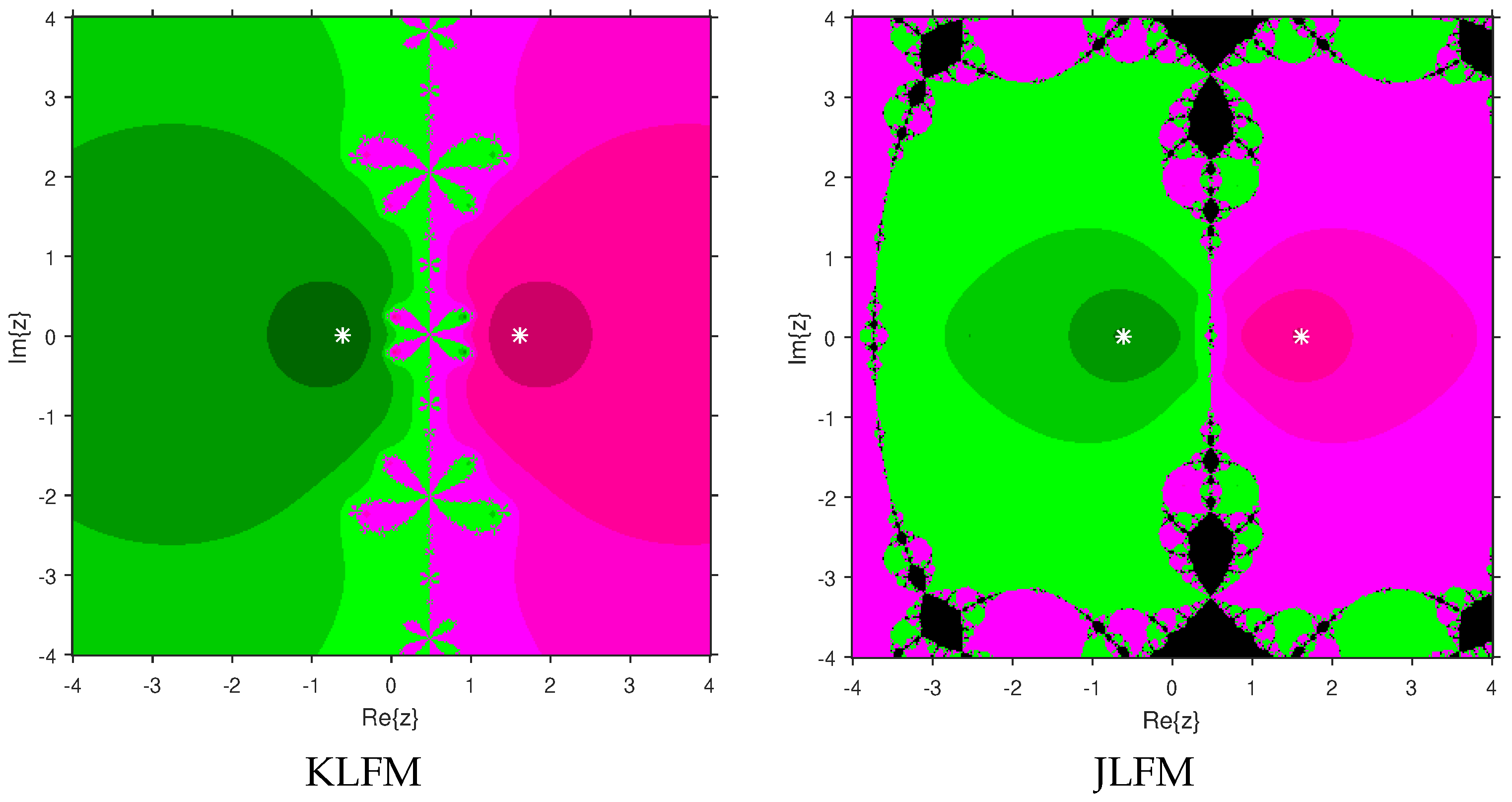
3. Comparison of Attraction Basins
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Amat, S.; Busquier, S. Advances in Iterative Methods for Nonlinear Equations; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Amat, S.; Busquier, S.; Plaza, S. Dynamics of the King and Jarratt iterations. Aequationes Math. 2005, 69, 212–223. [Google Scholar] [CrossRef]
- Argyros, I.K. The Theory and Applications of Iteration Methods, 2nd ed.; Engineering Series; CRC Press, Taylor and Francis Group: Boca Raton, FL, USA, 2022. [Google Scholar]
- Cordero, A.; Torregrosa, J.R. Variants of Newtons method using fifth-order quadrature formulas. Appl. Math. Comput. 2007, 190, 686–698. [Google Scholar]
- Ezquerro, J.A.; Gutiérrez, J.M.; Hernández, M.A.; Salanova, M.A. Chebyshev-like methods and quadratic equations. Rev. Anal. Numer. Théor. Approx. 1999, 28, 23–35. [Google Scholar]
- Hueso, J.L.; Martínez, E.; Teruel, C. Convergence, efficiency and dynamics of new fourth and sixth order families of iterative methods for nonlinear systems. J. Comput. Appl. Math. 2015, 275, 412–420. [Google Scholar] [CrossRef]
- Petković, M.S.; Neta, B.; Petković, L.; Džunixcx, D. Multipoint Methods for Solving Nonlinear Equations; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Rheinboldt, W.C. An adaptive continuation process for solving systems of nonlinear equations. In Mathematical Models and Numerical Methods; Tikhonov, A.N., Ed.; Instytut Matematyczny Polskiej Akademi Nauk: Warsaw, Poland, 1978; Volume 3, pp. 129–142. [Google Scholar]
- Traub, J.F. Iterative Methods for Solution of Equations; Prentice-Hall: Upper Saddle River, NJ, USA, 1964. [Google Scholar]
- Chun, C. Some variants of King’s fourth-order family of methods for nonlinear equations. Appl. Math. Comput. 2007, 190, 57–62. [Google Scholar] [CrossRef]
- King, J.F. A family of fourth-order methods for nonlinear equations. SIAM J. Numer. Anal. 1973, 10, 876–879. [Google Scholar] [CrossRef]
- Wang, X.; Kou, J.; Li, Y. Modified Jarratt method with sixth-order convergence. Appl. Math. Lett. 2009, 22, 1798–1802. [Google Scholar] [CrossRef] [Green Version]
- Jarratt, P. Some fourth order multipoint iterative methods for solving equations. Math. Comp. 1966, 20, 434–437. [Google Scholar] [CrossRef]
- Ghanbari, B. A new general fourth-order family of methods for finding simple roots of nonlinear equations. J. King Saud Univ.-Sci. 2011, 23, 395–398. [Google Scholar] [CrossRef] [Green Version]
- Grau-Sánchez, M.; Gutiérrez, J.M. Zero-finder methods derived from Obreshkovs techniques. Appl. Math. Comput. 2009, 215, 2992–3001. [Google Scholar]
- Cordero, A.; Hueso, J.L.; Martínez, E.; Torregrosa, J.R. A modified Newton–Jarratt’s composition. Numer. Algorithms 2010, 55, 87–99. [Google Scholar] [CrossRef]
- Sharma, J.R.; Guna, R.K.; Sharma, R. An efficient fourth order weighted-Newton method for systems of nonlinear equations. Numer. Algorithms 2013, 62, 307–323. [Google Scholar] [CrossRef]
- Sharma, J.R.; Arora, H. Efficient Jarratt-like methods for solving systems of nonlinear equations. Calcolo 2014, 51, 193–210. [Google Scholar] [CrossRef]
- Cordero, A.; García-Maimó, J.; Torregrosa, J.R.; Vassileva, M.P. Solving nonlinear problems by Ostrowski-Chun type parametric families. J. Math. Chem. 2015, 53, 430–449. [Google Scholar] [CrossRef] [Green Version]
- Solaiman, O.S.; Karim, S.A.A.; Hashim, I. Optimal fourth- and eighth-order of convergence derivative-free modifications of King’s method. J. King Saud Univ.-Sci. 2019, 31, 1499–1504. [Google Scholar] [CrossRef]
- Blanchard, P. Complex Analytic Dynamics on the Riemann Sphere. Bull. Am. Math. Soc. 1984, 11, 85–141. [Google Scholar] [CrossRef] [Green Version]
- Chen, D. On the convergence and optimal error estimates of King’s iteration procedures for solving nonlinear equations. Int. J. Comput. Math. 1989, 26, 229–237. [Google Scholar] [CrossRef]
- Hernández, M.A.; Salanova, M.A. Relaxing convergence conditions for the Jarratt method. Southwest J. Pure Appl. Math. 1997, 2, 16–19. [Google Scholar]
- Kou, J.; Li, Y. An improvement of the Jarratt method. Appl. Math. Comput. 2007, 189, 1816–1821. [Google Scholar] [CrossRef]
- Magreñán, Á.A. Different anomalies in a Jarratt family of iterative root-finding methods. Appl. Math. Comput. 2014, 233, 29–38. [Google Scholar]
- Neta, B.; Scott, M.; Chun, C. Basins of attraction for several methods to find simple roots of nonlinear equations. Appl. Math. Comput. 2012, 218, 10548–10556. [Google Scholar] [CrossRef]
- Regmi, S.; Argyros, I.K.; George, S.; Argyros, C.I. On the local convergence and comparison between two novel eighth convergence order schemes for solving nonlinear equations. Nonlinear Stud. 2021, 28, 1107–1116. [Google Scholar]
- Sharma, D.; Parhi, S.K.; Sunanda, S.K. Extending the convergence domain of deformed Halley method under ω condition in Banach spaces. Bol. Soc. Mat. Mex. 2021, 27, 32. [Google Scholar] [CrossRef]
- Sharma, D.; Parhi, S.K. On the local convergence of higher order methods in Banach spaces. Fixed Point Theory 2021, 22, 855–870. [Google Scholar] [CrossRef]
- Xu, Y.; Jiao, Y.; Chen, Z. On an independent subharmonic sequence for vibration isolation and suppression in a nonlinear rotor system. Mech. Syst. Signal Process. 2022, 178, 109259. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Z.; Luo, A. On bifurcation trees of period-1 to period-2 motions in a nonlinear Jeffcott rotor system. Int. J. Mech. Sci. 2019, 160, 429–450. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Z.; Luo, A. Period-1 Motion to Chaos in a Nonlinear Flexible Rotor System. Int. J. Bifurc. Chaos 2020, 30, 2050077. [Google Scholar] [CrossRef]
- Argyros, I.K. Unified convergence criteria for iterative Banach space valued methods with applications. Mathematics 2021, 9, 1942. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KLFM | JLFM |
|---|---|
| KLFM | JLFM |
|---|---|
| KLFM | JLFM |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Argyros, I.K.; Regmi, S.; Shakhno, S.; Yarmola, H. Perturbed Newton Methods for Solving Nonlinear Equations with Applications. Symmetry 2022, 14, 2206. https://doi.org/10.3390/sym14102206
Argyros IK, Regmi S, Shakhno S, Yarmola H. Perturbed Newton Methods for Solving Nonlinear Equations with Applications. Symmetry. 2022; 14(10):2206. https://doi.org/10.3390/sym14102206
Chicago/Turabian StyleArgyros, Ioannis K., Samundra Regmi, Stepan Shakhno, and Halyna Yarmola. 2022. "Perturbed Newton Methods for Solving Nonlinear Equations with Applications" Symmetry 14, no. 10: 2206. https://doi.org/10.3390/sym14102206