
Some Topological Approaches for Generalized Rough Sets and Their Decision-Making Applications

 , ,
, ,  ,
, 
Abstract
:1. Introduction
- Present an economic application in decision-making to declare the importance of the given approaches.
- Investigate some techniques that elucidate some topological methods to generate approximation spaces.
2. Basic Concepts
2.1. Topological Spaces
- (i)
- Regular open (briefly,-open) if .
- (ii)
- Preopen (briefly, -open) if .
- (iii)
- Semi-open (briefly, -open) if .
- (iv)
- -open (-open) if .
- (v)
- -open, if .
- (vi)
- -open (semi-pre-open) if .
- (i)
- All the above-mentioned sets are called nearly open sets and the complements of these nearly open sets are called nearly closed sets. Moreover, the classes of all nearly open (resp. nearly closed) sets of denoted by (resp. ), for each
- (ii)
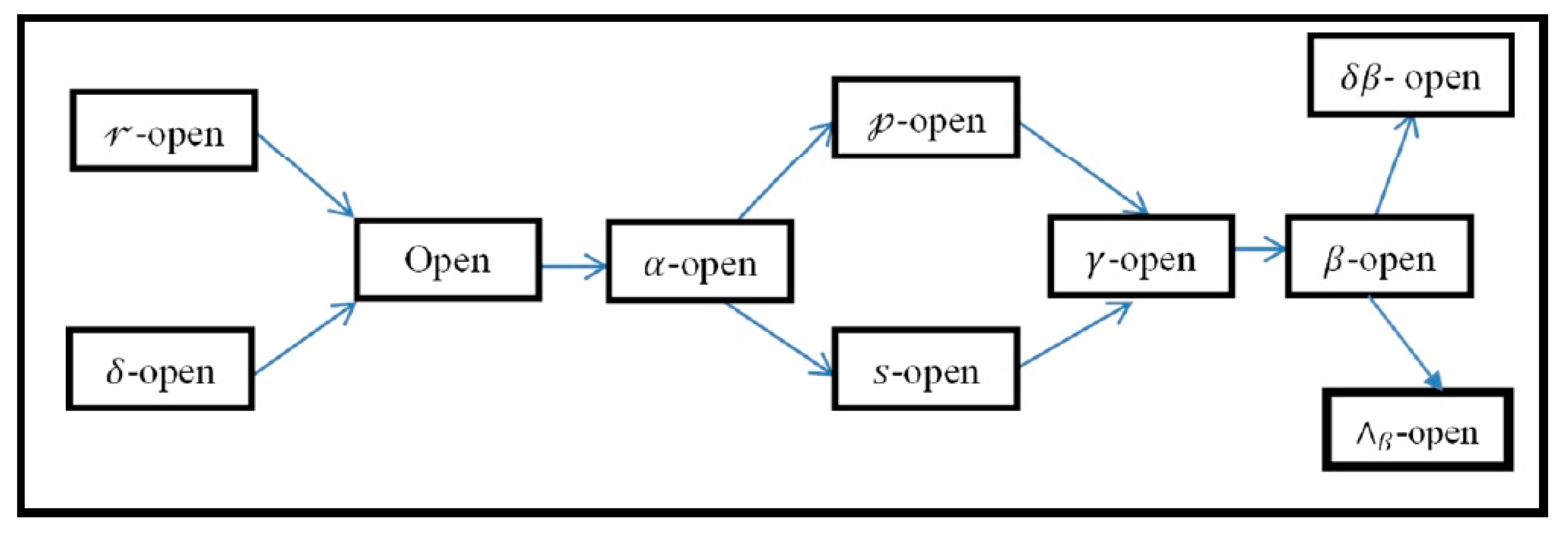
- The relationship among different types of nearly open sets is given by Figure 1, and it is necessarily noticed that each arrow () in the diagram represents a relation ().
2.2. Rough Set Theory
| (L1) (L2) (L3) (L4) (L5) If then (L6) (L7) (L8) (L9) (L10) | (U1) (U2) (U3) (U4) (U5) If then (U6) (U7) (U8) (U9) (U10) |
2.3. j-Neighborhood Spaces
- (i)
- -neighborhood: .
- (ii)
- -neighborhood: .
- (iii)
- -neighborhood: .
- (iv)
- -neighborhood: .
- (v)
- -neighborhood: .
- (vi)
- -neighborhood: .
- (vii)
- -neighborhood: .
- (viii)
- -neighborhood: .
3. Generalized j-Neighborhood Spaces and j-Adhesion Approximations
3.1. Further Properties and Relationships among j-Neighborhoods Spaces and j-Adhesion Neighborhoods
- (i)
- .
- (ii)
- .
- (iii)
- .
- (iv)
- .
- (v)
- .
- (vi)
- .
- (vii)
- .
- (viii)
- .
- (i)
- .
- (ii)
- .
- (iii)
- .
- (iv)
- .
- (i)
- For each: .
- (ii)
- if and only if.
- (i)
- .
- (ii)
- .
- (i)
- .
- (ii)
- .
- 1.
- .
- 2.
- .
- 3.
- .
- .
- .
- .
- .
- .
- .
3.2. Topologies Generated by -Adhesion Neighborhoods
- .
- .
- .
- .
- and
- and.
3.3. Generalized Rough Approximations Based on j-Adhesion Neighborhoods
| (L1) | (U1) |
| (L2) | (U2) |
| (L3) | (U3) |
| (L4) | (U4) |
| (L5) If then | (U5) If then |
| (L6) | (U6) |
| (L7) | (U7) |
| (L8) | (U8) |
- 1.
- .
- 2.
- .
- 3.
- If is -exact, then it is a -adhesion exact.
- (i)
- .
- (ii)
- .
- (i)
- .
- (ii)
- .
4. Generalized Rough Set Approximations Based on Near Open Sets
5. Economic Application in Decision-Making
- -
- The class of all -open sets of is:
- -
- The class of all -open sets of is:
- (1)
- There are several approaches to approximate the rough sets, the finest of them is our approaches since by using these approaches the boundary regions are cancelled (are empty) and thus the accuracy measure is more accurate than the other measures. In addition, we can say that our accuracy measures are more accurate than any other measure because our measures are 100%.
- (2)
- Our methods are the best methods for measuring the precision and ambiguity of the sets, and therefore our methods are magic tools for decision-making in the rough set theory and will benefit from the extraction and detection of hidden information in data collected from real-life applications. For example, we consider the subsets and which represent respectively, the set of growth and not growth countries. Then, the approximations of them, by using M. Hosny methods in (Definitions 16 and 18) and the current methods in the present paper (Definition 26) are given respectively as follows:
- -
- M. Hosny methods [12]:The approximations for the growth countries set are:, and . Thus, and and accordingly is rough (not definable) set. Moreover, which is not growth country belongs to the boundary of which represents a growth country.Similarly, the approximations for the not growth countries set are:, and . Thus, and and accordingly is rough (not definable) set. Moreover, which is not growth country not belongs to and thus we cannot be able to decide is is growth or not growth country.
- -
- Our methods:The approximations for the growth countries set are:. Thus, and .
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pawlak, Z. Rough sets. Int. J. Inf. Comput. Sci. 1982, 11, 341–356. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough Sets: Theoretical Aspects of Reasoning about Data; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1991. [Google Scholar]
- Allam, A.A.; Bakeir, M.Y.; Abo-Tabl, E.A. New Approach for Basic Rough Set Concepts. In Proceedings of the International Workshop on Rough Sets, Fuzzy Sets, Data Mining, and Granular Computing, Berlin, Germany,31 August–3 September 2005; Lecture Notes in Artificial Intelligence; Springer: Regina, SK, Canada, 2005; Volume 3641, pp. 64–73. [Google Scholar]
- Al-shami, T.M. An improvement of rough sets’ accuracy measure using containment neighborhoods with a medical application. Inf. Sci. 2021, 569, 110–124. [Google Scholar] [CrossRef]
- Al-shami, T.M.; Alshammari, I.; El-Shafei, M.E. A comparison of two types of rough approximations based on Nj- neighborhoods. J. Intell. Fuzzy Syst. 2021, 41, 1393–1406. [Google Scholar] [CrossRef]
- Al-shami, T.M.; Fu, W.Q.; Abo-Tabl, E.A. New rough approximations based on E-neighborhoods. Complexity 2021, 2021, 6. [Google Scholar] [CrossRef]
- El-Bably, M.K.; Al-shami, T.M. Different kinds of generalized rough sets based on neighborhoods with a medical application. Int. J. Biomath. 2021, 14, 2150086. [Google Scholar] [CrossRef]
- Kin, K.; Yang, J.; Pei, Z. Generalized rough sets based on reflexive and transitive relations. Inf. Sci. 2008, 178, 4138–4141. [Google Scholar]
- Atef, M.; Khalil, A.M.; Li, S.G.; Azzam, A.; El Atik, A. Comparison of six types of rough approximations based on j-neighborhood space and j-adhesion neighborhood space. J. Intell. Fuzzy Syst. 2020, 39, 4515–4531. [Google Scholar] [CrossRef]
- Abd El-Monsef, M.E.; Embaby, O.A.; El-Bably, M.K. Comparison between rough set approximations based on different topologies. Int. J. Granul. Comput. Rough Sets Intell. Syst. 2014, 3, 292–305. [Google Scholar]
- Abd El-Monsef, M.E.; EL-Gayar, M.A.; Aqeel, R.M. A comparison of three types of rough fuzzy sets based on two universal sets. Int. J. Mach. Learn. Cybern. 2017, 8, 343–353. [Google Scholar] [CrossRef]
- Hosny, M. On generalization of rough sets by using two different methods. J. Intell. Fuzzy Syst. 2018, 35, 979–993. [Google Scholar] [CrossRef]
- Abd El-Monsef, M.E.; EL-Gayar, M.A.; Aqeel, R.M. On relationships between revised rough fuzzy approximation operators and fuzzy topological spaces. Int. J. Granul. Comput. Rough Sets Intell. Syst. 2014, 3, 257–271. [Google Scholar]
- Riaz, M.; Karaaslan, F.; Nawaz, I.; Sohail, M. Soft multi-rough set topology with applications to multi-criteria decision-making problems. Soft Comput. 2021, 25, 799–815. [Google Scholar] [CrossRef]
- Hashmi, M.R.; Tehrim, S.T.; Riaz, M.; Pamucar, D.; Cirovic, G. Spherical Linear Diophantine Fuzzy Soft Rough Sets with Multi-Criteria Decision Making. Axioms 2021, 10, 185. [Google Scholar] [CrossRef]
- Riaz, M.; Hashmi, M.R.; Kalsoom, H.; Pamucar, D.; Chu, Y.M. Linear Diophantine fuzzy soft rough sets for the selection of sustainable material handling equipment. Symmetry 2020, 12, 1215. [Google Scholar] [CrossRef]
- Amer, W.S.; Abbas, M.I.; El-Bably, M.K. On j-near concepts in rough sets with some applications. J. Intell. Fuzzy Syst. 2017, 32, 1089–1099. [Google Scholar] [CrossRef]
- Zhu, W. Topological approaches to covering rough sets. Inf. Sci. 2007, 177, 1499–1508. [Google Scholar] [CrossRef]
- Yao, Y.Y. Two views of the theory of rough sets in finite universes. Int. J. Approx. Reason. 1996, 15, 291–317. [Google Scholar] [CrossRef] [Green Version]
- El Sayed, M.; El Safty, M.A.; El-Bably, M.K. Topological approach for decision-making of COVID-19 infection via a nano-topology model. AIMS Math. 2021, 6, 7872–7894. [Google Scholar] [CrossRef]
- Thivagar, M.L.; Richard, C. On nano forms of weakly open sets. Int. J. Math. Stat. Invent. 2013, 1, 31–37. [Google Scholar]
- Abu-Gdairi, R.; El-Gayar, M.A.; El-Bably, M.K.; Fleifel, K.K. Two Different Views for Generalized Rough Sets with Applications. Mathematics 2021, 18, 2275. [Google Scholar] [CrossRef]
- El-Bably, M.K.; Abo-Tabl, E.A. A topological reduction for predicting of a lung cancer disease based on generalized rough sets. J. Intell. Fuzzy Syst. 2021, 41, 3045–3060. [Google Scholar] [CrossRef]
- El-Atik, A.A. A Study of Some Types of Mappings on Topological Spaces. Master’s Thesis, Tanta University, Tanta, Egypt, 1997. [Google Scholar]
- Tantawy, O.; Abdallah, M.; Nawar, A. Generalization of Pawlak’s rough approximation spaces by using ij-χ-open sets and its applications. J. Intell. Fuzzy Syst. 2017, 33, 1089–1099. [Google Scholar] [CrossRef]
- Mashhour, A.S.; Abd El-Monsef, M.E.; El-Deeb, S.N. On pre continuous and weak pre continuous mappings. Proc. Math. Phys. Soc. Egypt 1982, 53, 47–53. [Google Scholar]
- Andrijević, D. Semi-preopen sets. Math. Vesnik 1986, 38, 24–32. [Google Scholar]
- Andrijević, D. On b-open sets. Math. Vesnik 1996, 48, 59–64. [Google Scholar]
- Maki, H. Generalized Λ-sets and the associated closure operator. Spec. Issue Commem. Prof. Kazusada Ikeda’s Retire. 1986, 3, 139–146. [Google Scholar]
- Kelley, J. General Topology; Van Nostrand Company: New York, NY, USA, 1955. [Google Scholar]
- Abd El-Monsef, M.E. Studies on Some Pre-Topological Concepts. Ph.D. Thesis, Tanta University, Tanta, Egypt, 1980. [Google Scholar]
- Abd El-Monsef, M.E.; El-Deeb, S.N.; Mahmoud, R.A. β-open sets and β-continuous mappings. Bull. Fac. Sci. Assiut Univ. 1983, 12, 77–90. [Google Scholar]
- Levine, N. Semi-open sets and semi-continuity in topological spaces. Am. Math. Mon. 1963, 70, 36–41. [Google Scholar] [CrossRef]
- Njastad, O. On some classes of nearly open sets. Pac. J. Math. 1965, 15, 961–970. [Google Scholar] [CrossRef] [Green Version]
- Noiri, T.; Hatir, E. ∧sp-sets and some weak separation axioms. Acta Math. Hung. 2004, 103, 225–232. [Google Scholar] [CrossRef]
- Ma, L. On some types of neighborhood-related covering rough sets. Int. J. Approx. Reason. 2012, 53, 901–911. [Google Scholar] [CrossRef] [Green Version]
- Nawar, A.S.; El-Bably, M.K.; El-Atik, A.A. Certain types of coverings based rough sets with application. J. Intell. Fuzzy Syst. 2020, 39, 3085–3098. [Google Scholar] [CrossRef]
- Abd El-Monsef, M.E.; Kozae, A.M.; El-Bably, M.K. On generalizing covering approximation space. J. Egypt. Math. Soc. 2015, 23, 535–545. [Google Scholar] [CrossRef] [Green Version]
- El-Bably, M.K.; Al-shami, T.M.; Nawar, A.S.; Mhemdi, A. Corrigendum to “Comparison of six types of rough approximations based on j-neighborhood space and j-adhesion neighborhood space”. J. Intell. Fuzzy Syst. 2021, 1–8. [Google Scholar] [CrossRef]
- Al-shami, T.M. Improvement of the approximations and accuracy measure of a rough set using somewhere dense sets. Soft Comput. 2021, 25, 14449–14460. [Google Scholar] [CrossRef]
- Al-shami, T.M.; Ciucci, D. Subset neighborhood rough sets. Knowl.-Based Syst. 2022, 237, 107868. [Google Scholar] [CrossRef]


{kind=link}
| . | |||
| M. Atef et al. [9] Definition 23 | M. Hosny [12] Definition 16 | M. Hosny [12] Definition 18 | The Current Method Definition 26 | |||||
|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 0 | 1 | |||||
| 1 | 0 | 1 | 1 | |||||
| 0 | 1 | 1 | 1 | |||||
| 0 | 1 | 1 | 1 | |||||
| 1 | 1 | 1/2 | 1 | |||||
| 1 | 1 | 1/2 | 1 | |||||
| 1/3 | 1 | 1/2 | 1 | |||||
| 1/3 | 1 | 1/2 | 1 | |||||
| 1 | 1 | 1 | 1 | |||||
| 1/3 | 1 | 1 | 1 | |||||
| 1/3 | 1 | 1 | 1 | |||||
| 1 | 1 | 2/3 | 1 | |||||
| 1 | 1 | 1 | 1 | |||||
| 1/3 | 1 | 2/3 | 1 | |||||
| 1/3 | 1 | 2/3 | 1 | |||||
| 1/2 | 1 | 2/3 | 1 | |||||
| 1/2 | 1 | 2/3 | 1 | |||||
| 1 | 1 | 1 | 1 | |||||
| 1 | 1 | 2/3 | 1 | |||||
| 1/2 | 1 | 1 | 1 | |||||
| 1/2 | 1 | 1 | 1 | |||||
| 1 | 1 | 1 | 1 | |||||
| 1/2 | 1 | 3/4 | 1 | |||||
| 1/2 | 1 | 3/4 | 1 | |||||
| 1 | 1 | 3/4 | 1 | |||||
| 1 | 1 | 3/4 | 1 | |||||
| 3/5 | 1 | 1 | 1 | |||||
| 3/5 | 1 | 1 | 1 | |||||
| 1 | 4/5 | 1 | 1 | |||||
| 1 | 1 | 4/5 | 1 | |||||
| 1 | 1 | 1 | 1 | |||||
| Country | Decision | |||
| Growth | ||||
| Growth | ||||
| Not growth | ||||
| Growth | ||||
| Not growth |
| M. Hosny Method | The Proposed Method | |||||
|---|---|---|---|---|---|---|
| 1 | 0 | 1 | ||||
| 1 | 1/2 | 1 | ||||
| 1 | 1 | 1 | ||||
| 1/2 | 1/2 | 1 | ||||
| 0 | 0 | 1 | ||||
| 1 | 1 | 1 | ||||
| 1 | 1/2 | 1 | ||||
| 2/3 | 1/3 | 1 | ||||
| 1/2 | 0 | 1 | ||||
| 1 | 2/3 | 1 | ||||
| 2/3 | 1/2 | 1 | ||||
| 1/2 | 1/3 | 1 | ||||
| 2/3 | 2/3 | 1 | ||||
| 1/2 | 1/2 | 1 | ||||
| 1 | 1 | 1 | ||||
| 1 | 1 | 1 | ||||
| 3/4 | 3/4 | 1 | ||||
| 2/3 | 2/3 | 1 | ||||
| 3/4 | 1/2 | 1 | ||||
| 2/3 | 1/3 | 1 | ||||
| 1 | 2/3 | 1 | ||||
| 3/4 | 3/5 | 1 | ||||
| 2/3 | 1/2 | 1 | ||||
| 1 | 3/4 | 1 | ||||
| 1 | 1 | 1 | ||||
| 4/5 | 4/5 | 1 | ||||
| 3/4 | 3/4 | 1 | ||||
| 1 | 1 | 1 | ||||
| 1 | 3/4 | 1 | ||||
| 1 | 4/5 | 1 | ||||
| 1 | 1 | 1 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abu-Gdairi, R.; El-Gayar, M.A.; Al-shami, T.M.; Nawar, A.S.; El-Bably, M.K. Some Topological Approaches for Generalized Rough Sets and Their Decision-Making Applications. Symmetry 2022, 14, 95. https://doi.org/10.3390/sym14010095
Abu-Gdairi R, El-Gayar MA, Al-shami TM, Nawar AS, El-Bably MK. Some Topological Approaches for Generalized Rough Sets and Their Decision-Making Applications. Symmetry. 2022; 14(1):95. https://doi.org/10.3390/sym14010095
Chicago/Turabian StyleAbu-Gdairi, Radwan, Mostafa A. El-Gayar, Tareq M. Al-shami, Ashraf S. Nawar, and Mostafa K. El-Bably. 2022. "Some Topological Approaches for Generalized Rough Sets and Their Decision-Making Applications" Symmetry 14, no. 1: 95. https://doi.org/10.3390/sym14010095