3.1. Setup of the Case Study
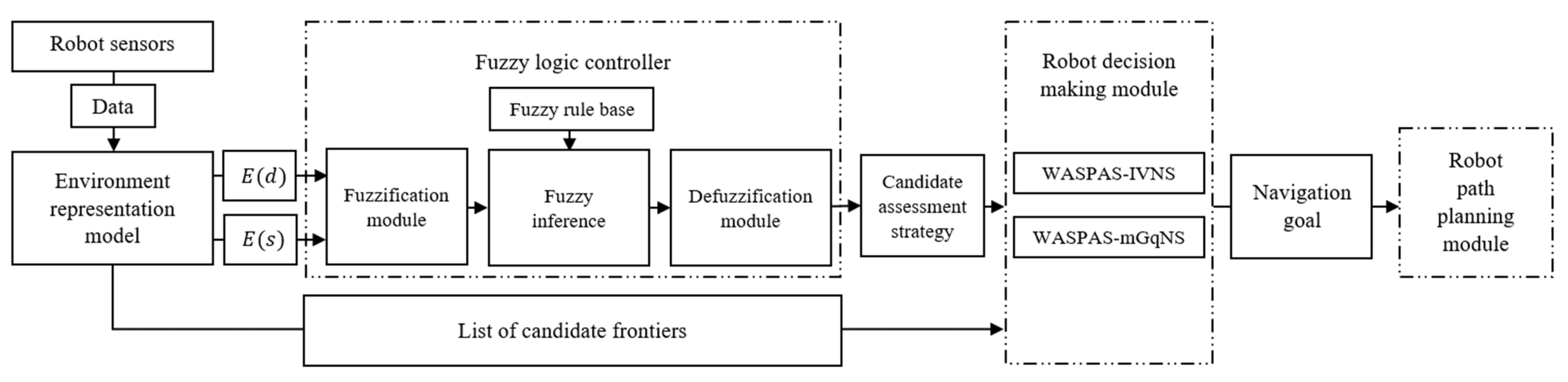
The proposed autonomous environment exploration strategy is implemented into the simulated multi-purpose four-wheeled Pioneer 3-AT robot. This robot platform is chosen due to its extensive application in the context of academic autonomous mobile robot research, including the field of search and rescue missions. The Robot Operating System (ROS) provided libraries and packages are applied to set up robot navigation stack and other core components, including environment perception, localisation, movement, and mapping modules. However, the navigation stack is extended by implementing the proposed autonomous environment exploration strategy which is introduced in the
Section 2 of this paper.
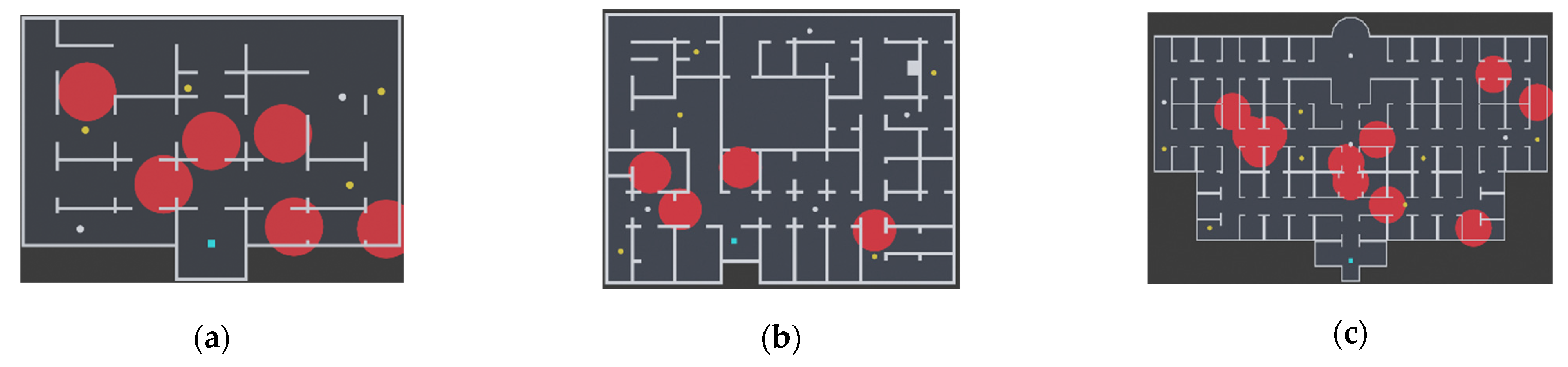
The proposed environment exploration strategy is evaluated in the three simulated indoor environments that represent hypothetical disaster sites. The structures of these environments are presented in
Figure 2. Here, the blue squares represent the robot starting positions. The red markers represent dangerous areas with a diameter of 4 m that the robot must avoid. The yellow markers represent the survivors the robot must reach. Lastly, the white markers represent priority locations set by the robot operators.
The 1st environment (a) represents the SAR environment with multiple open spaces. This topology allows the robot to move to any room within the exploration space without any need for backtracking. The 2nd environment (b) represents an environment with clearly separated left and right areas. This topology should force the robot to show backtracking behaviour as there is only one path that connects both areas. Finally, the 3rd environment (c) represents an environment with a mirrored loop-type topology. In this kind of topology, the robot can visit multiple areas while moving between the connecting corridor loops. To simplify the simulation, it is assumed that in all three environments, survivors and dangerous areas do not change their locations during the simulation. It is also worth noting, that the autonomous robot must cancel its current task and reach the detected survivor if it is nearby. If there are two or more unvisited objects near the autonomous robot, specifically, the hypothesised survivors or prioritised locations, the robot will always try to reach the closest survivor first. The survivor is considered successfully reached when the distance between it and the robot is less than 1.5 m [
33]. The environment exploration process is continued until one of the mission termination conditions are met, that is if the 10-min simulation-time window has elapsed or the robot has visited all the priority locations. In total, twenty simulation runs are performed for each strategy.
To perform the comparison between the proposed strategy and the baseline environment exploration methods, five parameters are considered. Namely, the robot travelled distance, the amount of the discovered environment information, the amount of received penalty, the ratio between the robot travelled distance and the discovered information, and the ratio between the received penalty points and the discovered information. The main goals of this assessment are:
To test the performance and the stability of the WASPAS-IVNS and WASPAS-mGqNS methods against the state-of-the-art WASPAS-SVNS [
32] method in simulated SAR missions.
To test the capabilities of the proposed environment exploration strategy in the simulated search and rescue mission and compare the results against the baseline frontier-assessment methods, namely, the Closest Frontier (CF) strategy, and the Standard Information Gain (SIG) strategy.
By applying the CF strategy, the decision on where the robot should move next is based only on the estimated time that is needed to reach the candidate frontier. The SIG strategy is based on the multi-criteria decision-making approach and is derived from previously discussed candidate assessment strategies [
5,
12,
14,
27,
28]. The criteria that define the SIG strategy along with their optimums and weights are presented in
Table 3. The utility of a candidate is measured by applying the state-of-the-art WASPAS-SVNS method.
3.2. Assessment of the WASPAS-IVNS and WASPAS-mGqNS Methods
The performance of the WASPAS-IVNS and WASPAS-mGqNS methods in SAR missions is first compared against the state-of-the-art WASPAS-SVNS method. The tested methods are expected to introduce slight differences in the robot performance when comparing the previously discussed parameters of the average amount of gained information, the average penalty received by the robot for traversing dangerous areas, and the average of robot travelled distance. However, the proposed methods should provide similar results when compared to the WASPAS-SVNS method, meaning, that the obtained variations between the results should mostly be insignificant, regardless of the increased (or decreased) robot performance. The simulation results are presented in
Table 4.
The obtained results indicate that the WASPAS-IVNS and WASPAS-mGqNS methods provide similar results when compared to the state-of-the-art WASPAS-SVNS method. In the 1st environment, the robot discovered the same amount of information and travelled an almost identical distance (with a 4–6% value increase between the results, when applying WASPAS-IVNS and WASPAS-mGqNS methods, respectively). Similar results were obtained in the 2nd and 3rd environments. In the 2nd environment, the amount of discovered information was increased by up to 1%, and the amount of travelled distance varied from a 1% decrease to 1% increase when applying WASPAS-IVNS and WASPAS-mGqNS methods, respectively. In the 3rd environment, the value of the robot travel distance was decreased by 4.5–6.5%, when applying WASPAS-IVNS and WASPAS-mGqNS methods. As the obtained results are relatively similar, an ANOVA statistical analysis test was performed to assess the significance of the observed variations. The obtained
values are presented in
Table 5.
The p values indicate that there is no statistical significance between the slight variations of the results by the state-of-the-art WASPAS-SVNS method and the WASPAS-IVNS method. However, the decrease in average robot travel distance by 6.5% and the average penalty for traversing dangerous areas by up to 63% in the 3rd environment by WASPAS-mGqNS method, can be considered as significant. Considering this result, it could be reasoned that in different topology SAR environments, the WASPAS-IVNS and WASPAS-mGqNS methods provide as stable results as the state-of-the-art WASPAS-SVNS method, while also making it possible to deal with the inaccuracies in the input data characteristics. This ability enables the robot to make slightly better decisions which, due to the applied frontier-based environment exploration approach, can have a long-term impact on the robot performance.
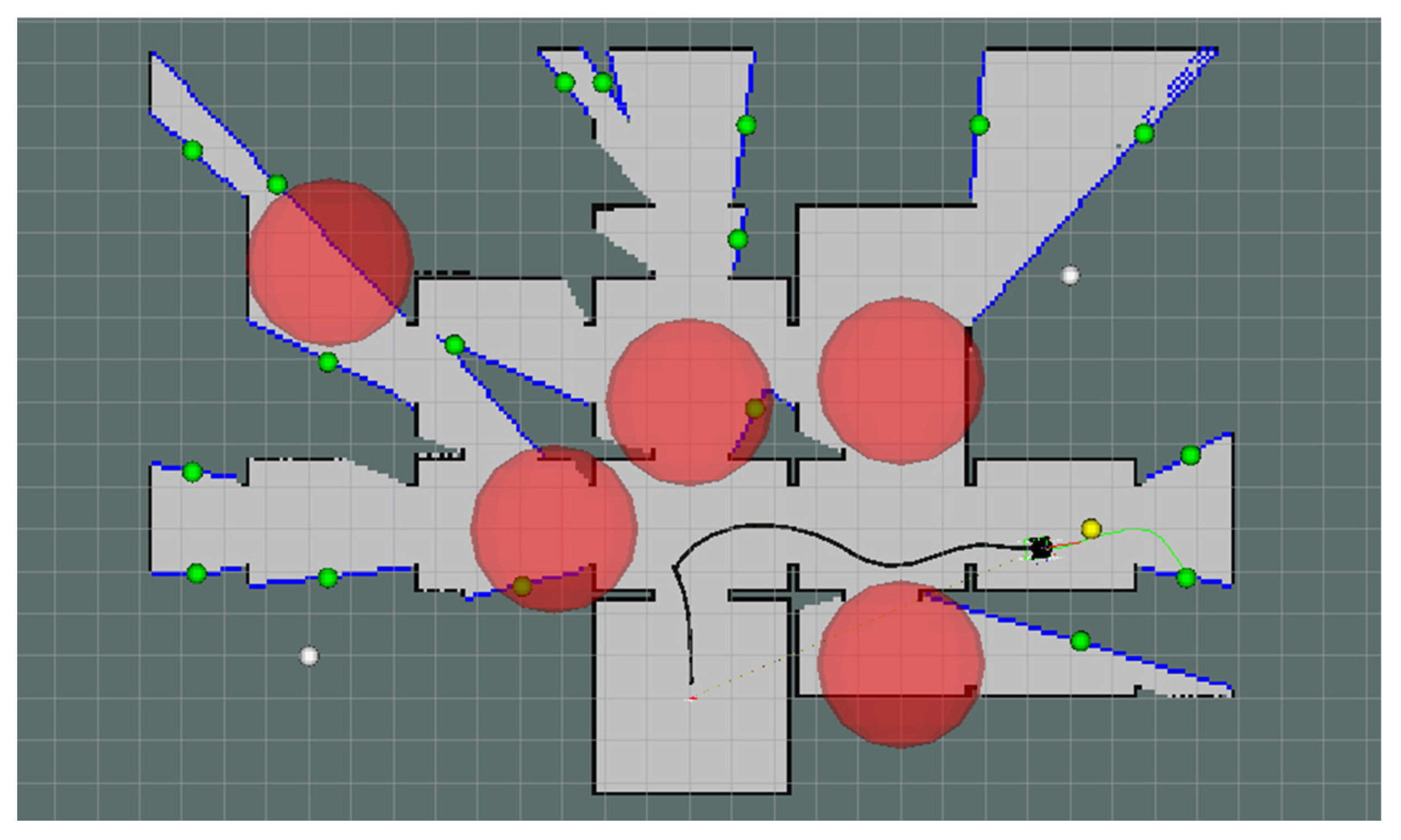
The ability to take into consideration the inaccurate input data characteristics and lead the robot to different frontiers is highlighted by providing a solution to a frontier assessment problem, presented in
Figure 3. Here, the robot’s position is marked by a black square. The frontier regions are marked by blue lines of grid map cells that are located between the known and the unknown exploration space. The green markers indicate the candidate frontiers. The white markers represent the priority locations, set by the robot operators. The yellow markers represent the detected survivors, and the red markers indicate dangerous areas.
In the considered frontier assessment problem, the robot must measure the utility of 18 candidate frontiers and select the one that should be reached next. The initial decision matrix constructed for the considered frontier assessment problem is presented in
Table 6. It is worth noting, that in this example there are no survivors that can be taken into consideration for the monitoring task, meaning that the
criterion has no influence in the decision-making process. Therefore, to address the specifics of the neutrosophic set algebra, the criterion value is set to a small positive number. Furthermore, to avoid indecisive robot behaviour, the
criterion value is set to a high randomised value when the robot is very close to the confirmed survivor. This is done so the robot would prioritise the survivors that are yet to be visited.
Next, the criteria values of the initial decision matrix are normalised and converted to the neutrosophic numbers by applying the methodologies presented in
Section 2 of this paper. Then, the products of the first and second WASPAS objectives are computed for each MCDM method that is tested, namely, for the WASPAS-SVNS, WASPAS-IVNS and WASPAS-mGqNS. Then, the results of the first and the second WASPAS objectives are summed to obtain the joint generalized value of the WASPAS method. Finally, the utility of each candidate frontier is measured and ranked by applying the WASPAS-SVNS, WASPAS-IVNS and WASPAS-mGqNS score functions. The candidate frontier with the highest utility score is then chosen as the next optimal goal the exploring robot should reach. The frontier utilities obtained in this step are presented in
Table 7.
Considering the computed utility scores, it can be observed that the candidate frontier is determined as the highest-valued frontier by the WASPAS-SVNS and WASPAS-mGqNS methods. However, when the assessment is performed by applying the WASPAS-IVNS method, the frontier is chosen as the next goal the robot should reach (this frontier is assumed to be the second-best by WASPAS-SVNS and WASPAS-mGqNS methods). A similar value switch of the candidate ranks is also observed when considering the frontiers ranked at the 3rd and the 4th place. This example highlights how the proposed methods can take into consideration the possible inaccuracies in the input data characteristics and consequently make better assessments when comparing similar candidates. Next, the results obtained by testing the proposed environment exploration strategy in all three simulated environments are discussed and compared against the baseline SIG and CF strategies.
3.3. Comparison of the Environment Exploration Strategies
The proposed environment exploration strategy which applies the fuzzy logic controller and either the proposed WASPAS-IVNS or WASPAS-mGqNS method for computing the utility of a candidate frontier is compared against the Closest Frontier strategy (CF) and the standard information-gain strategy (SIG). It is anticipated that the proposed adaptive environment exploration strategy will significantly increase the robot performance on all of the considered aspects: will increase the amount of the discovered environment information, reduce the robot travelled distance and reduce the robot-received penalty for traversing dangerous areas. To test this hypothesis, all strategies are applied individually when exploring the three previously introduced SAR environments. The averaged results obtained in these simulations are presented in
Table 8.
Considering the obtained results, the discovered information in the 1st environment is similar when comparing the four strategies. As the environment is relatively small the robot can discover its characteristics simply by reaching every available frontier within the set mission time limit, regardless of the applied strategy. Therefore, the important comparison metric in this type of environment is not the amount of discovered information, but rather the ability to balance multiple optimisation priorities, modelled by applying the proposed criteria set. For example, the robot travel distance or the penalty received for crossing dangerous areas.
Considering the penalty for crossing dangerous areas this value is reduced by 87.44% and 87.07% when comparing the proposed strategy which applies the WASPAS-IVNS method to the SIG and CF strategies. Similar results are observed when comparing the proposed strategy that applies the WASPAS-mGqNS method to the SIG and CF strategies. This average is reduced by 89.80% and 89.50%, respectively. By applying the proposed environment exploration strategy, the robot travel distance in this environment is reduced by 8.84–11.46%.
However, the amount of distance travelled by the robot is increased in the 2nd environment, as due to the environment topology the autonomous robot must traverse already visited areas multiple times. When comparing the SIG and CF strategies to the proposed environment exploration strategy by applying the WASPAS-IVNS method, the increase in travelled distance of 3.8% and 18.17% is observed. Similarly, the increase of 6.19% and 20.95% is observed, when the baseline strategies are compared to the proposed strategy that applies the WASPAS-mGqNS method.
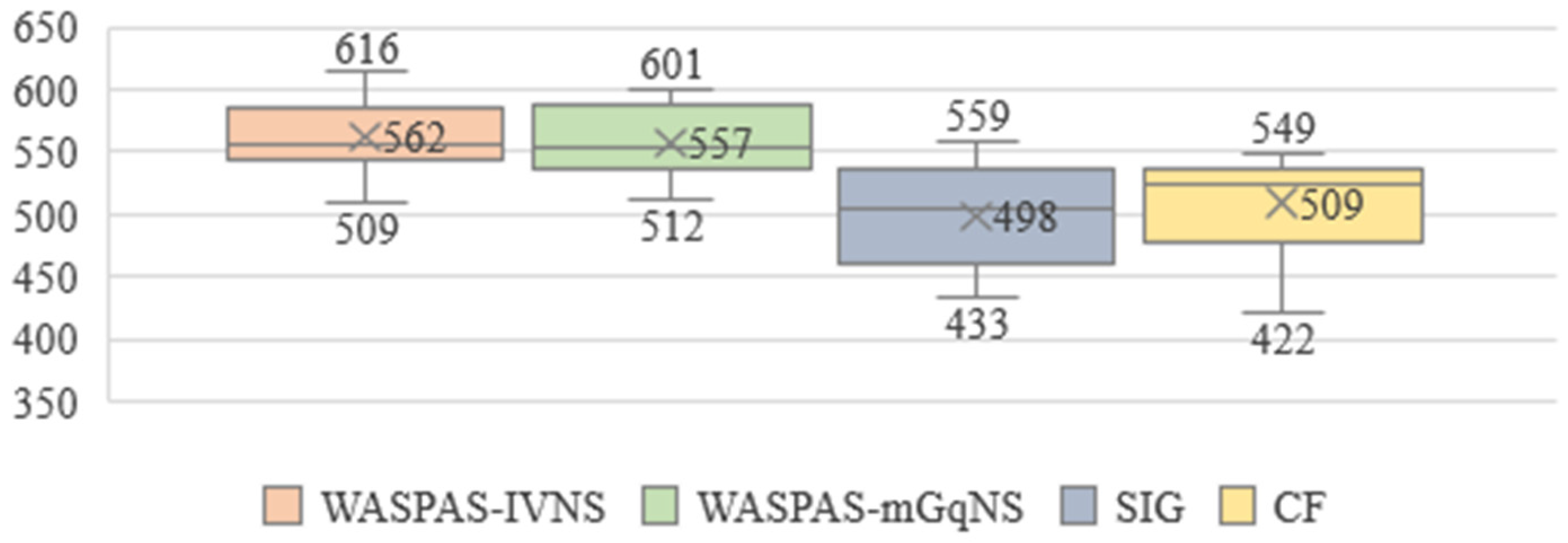
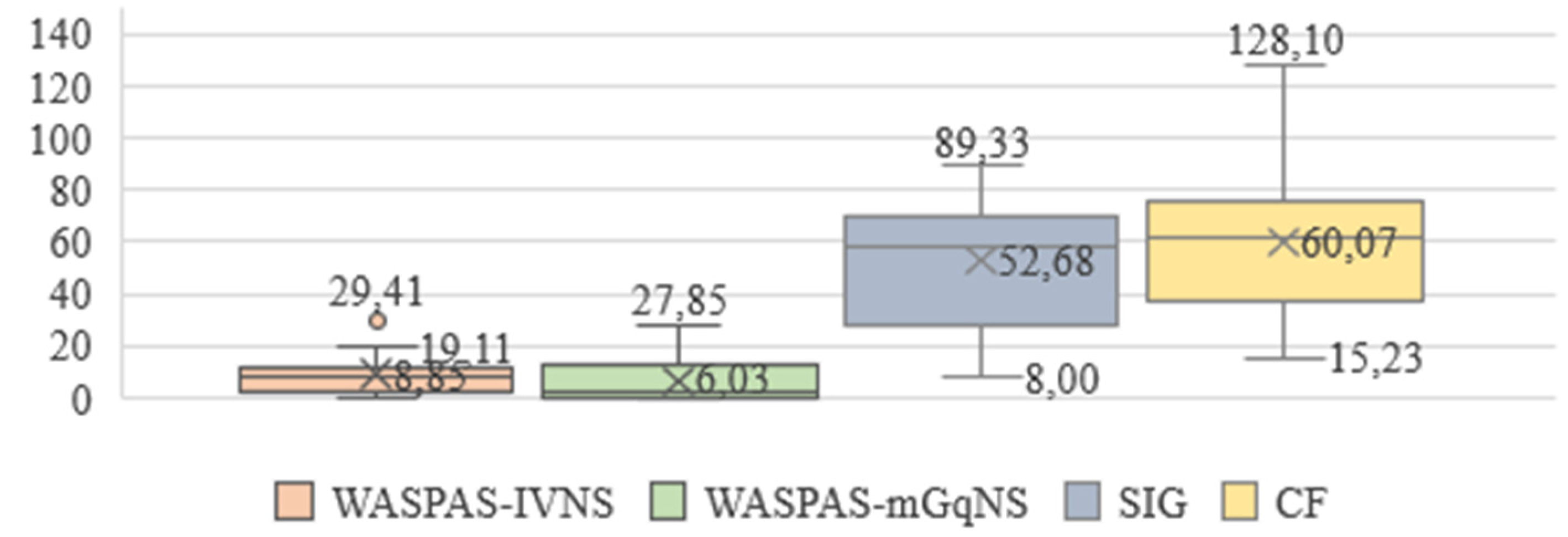
Nevertheless, the proposed environment exploration strategy increased the average of the discovered environment information by up to 9.51–12.69%. The amount of the discovered information in the 2nd environment is presented in
Figure 4. Here, the maximum value obtained by applying the SIG strategy is just slightly above the average, obtained by the proposed environment exploration strategy, when applying the WASPAS-mGqNS method. The minimum value, obtained by the proposed strategy when applying WASPAS-IVNS is just above the average obtained by the SIG strategy and is equal to the average obtained by the CF strategy.
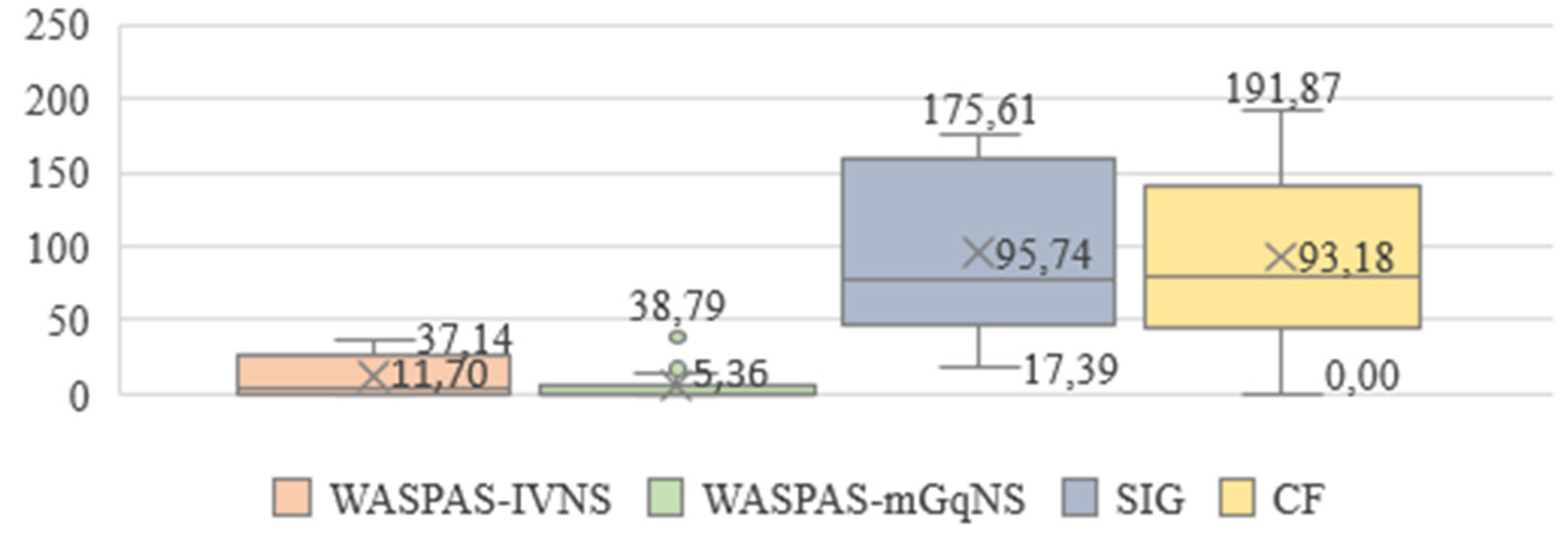
Finally, the penalty received for traversing dangerous areas is also reduced when applying the proposed environment exploration strategy. This value is reduced by 83.20% and 85.27% when comparing results obtained by applying the WASPAS-IVNS method to the results obtained when applying SIG and CF strategies, respectively. A similar observation can be made when comparing the results obtained when applying the WASPAS-mGqNS method. Here, the penalty is reduced by 88.56% and 89.97% when compared to the SIG and CF strategies, respectively. Furthermore, the data presented in
Figure 5 indicates that the baseline strategies display high variation between the received penalty values. In this case, the highest obtained penalty was received when applying the CF strategy, as this strategy tends to direct the robot to the frontiers that are located around (or within) the dangerous area, essentially locking the autonomous robot in the dangerous environment until the exhaustive exploration within the area is performed.
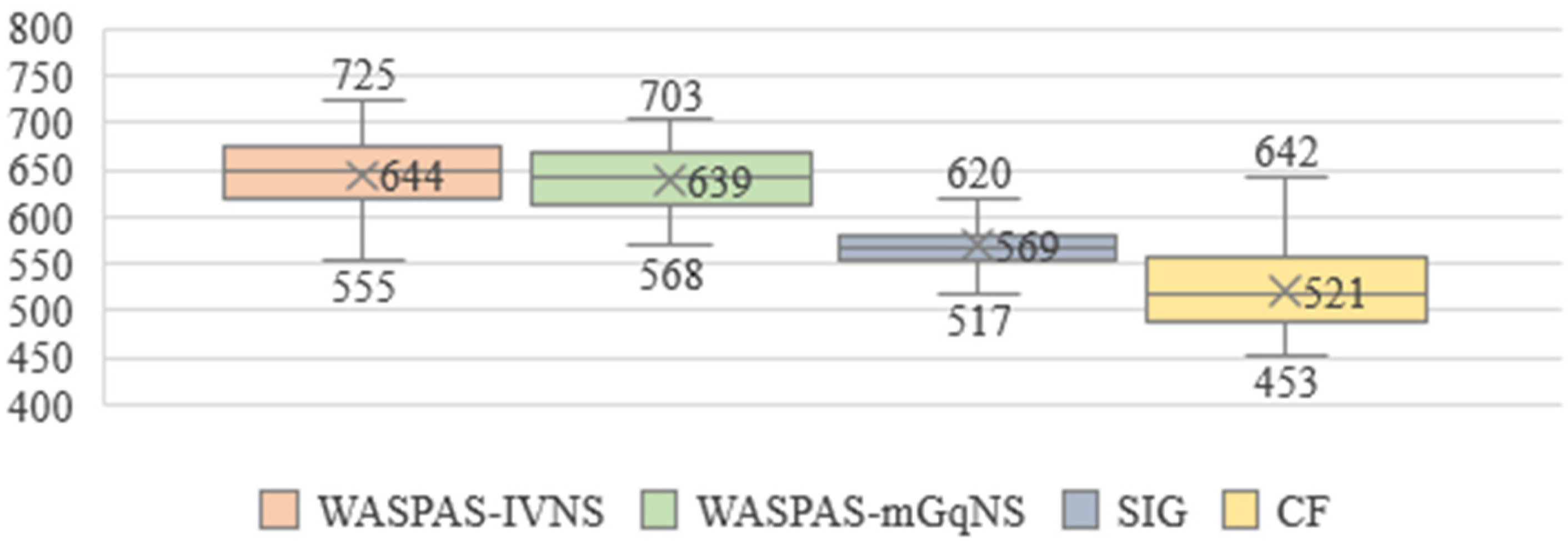
When considering the results obtained in the 3rd environment, it can be observed that the amount of the discovered information is increased by 13.19% and 23.60% when comparing the proposed environment exploration strategy (which applies the WASPAS-IVNS method) to the SIG and CF strategies. An increase of 12.27% and 22.60% is observed when applying the WASPAS-mGqNS. These results correlate to the those obtained in other environments, indicating the effectiveness of the proposed environment exploration strategy. Considering the additional data presented in
Figure 6, it can be observed that the maximum value obtained by the SIG strategy is less than the average of the discovered information by applying the proposed environment exploration strategy. However, the maximum value obtained by the CF strategy is slightly above the average obtained when the WASPAS-mGqNS method is applied, and slightly lower than the one obtained when the WASPAS-IVNS method is applied. Nevertheless, the average amount of information obtained by the CF strategy is the lowest of the four strategies.
The penalty for traversing the dangerous areas is also reduced in this environment. The decrease of up to 87% is observed when applying the proposed environment exploration strategy and the WASPAS-IVNS method. A decrease of up to 94.4% is observed when applying the WASPAS-mGqNS method. Furthermore, evaluating the additional data provided in
Figure 7, it can be reasoned that the CF strategy displays similar issues to the ones observed in the 2nd environment. As this strategy is more sensitive to various errors in the environment representation model than the proposed environment exploration strategy, it can often direct the robot to the different frontiers between the multiple simulations, depending only on how close the frontier is to the robot. This sensitivity reduces the stability of the baseline CF method, resulting in more dispersed results.
The improvements provided by the proposed environment exploration strategy are observed across all simulated environments. However, it is also observed that the proposed environment exploration strategy increases the robot travelled distance, and this increase is notable in the 2nd and the 3rd environments. For example, in the 3rd environment, the travelled distance was increased by up to 33.64% when applying the proposed environment exploration strategy. To assess the significance of the observed results, the ANOVA statistical analysis test is conducted. The obtained
values are presented in
Table 9 when the SIG strategy is tested against the proposed environment exploration strategies. The
p values for the CF strategy are presented in
Table 10. The considered α value in both tests is 0.05.
Considering the results presented in
Table 9 and
Table 10, it can be reasoned that the proposed environment exploration strategy can significantly increase the robot’s ability to avoid dangerous areas in SAR missions. Furthermore, by applying the proposed environment exploration strategy, the robot can significantly increase the amount of discovered information in larger environments that have a similar topology to that of the 2nd and 3rd environments. However, as the increase in robot travelled distance is observed to be rather significant in the 2nd and the 3rd environments, two additional ratio parameters (namely, the ratio between the robot travelled distance and the discovered information and the ratio between the received penalty and the discovered information) are considered to determine if the proposed environment exploration strategy is actually balancing between the optimisation priorities. These results are presented in
Table 11.
The averaged ratio values highlight that the proposed environment exploration strategy decreases the penalty for every travelled meter by up to 85–90%. These results are stable across the simulated SAR environments. However, the ratio between the robot travelled distance and the obtained information is not as stable. This value is decreased by up to 12% in the 1st environment. Decreased by 8.7% and increased by up to 9% in the 2nd environment and increased by up to 7% in the 3rd environment. To assess the significance of the observed variations between the proposed WASPAS-IVNS and WASPAS-mGqNS methods and the baseline strategies, an ANOVA statistical analysis test is performed. The obtained
values for the SIG method are presented in
Table 12. However, considering the ANOVA test results against the CF strategy, the increase and decrease of values in all environments are considered as significant, with all
p values < 0.05.
Considering the results, it can be concluded that the decrease in the received penalty relative to the travelled distance is significant in all three simulated environments. However, the increased robot travel distance in the 3rd environment is considered insignificant, when the proposed environment exploration strategy is compared to the baseline SIG strategy, and the decrease is significant in the 1st environment. This indicates, that in multiple situations the robot could balance between the given prioritisation requirements. However, it is worth noting that the results obtained by the frontier assessment strategies (such as the proposed one) strongly depend on the structure of the environment, and the positions of objects that attract or redirect the exploring robot. Nevertheless, the robot’s ability to avoid dangerous areas while also increasing the discovered environment information is an important feature that can be employed when exploring the SAR environments. The obtained results confirm that in some situations the proposed adaptive environment exploration strategy can significantly increase the robot performance when compared to the baseline CF and SIG strategies. It is also worth noting that the path planning process (which is used for several criteria value calculations) is a time-consuming procedure. However, the proposed decision-making approach for candidate frontier assessment does not require significant additional computational resources.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}