
Automatic Unsupervised Texture Recognition Framework Using Anisotropic Diffusion-Based Multi-Scale Analysis and Weight-Connected Graph Clustering


Abstract
:1. Introduction
2. Nonlinear Anisotropic Diffusion-Based Model for Multi-Scale Analysis
2.1. A Combined Fourth-Order PDE-Based Filtering Model
2.2. Finite Difference-Based Numerical Approximation Algorithm
3. Unsupervised Multi-Scale Texture Recognition Technique
3.1. Multi-Scale Texture Feature Extraction Approach
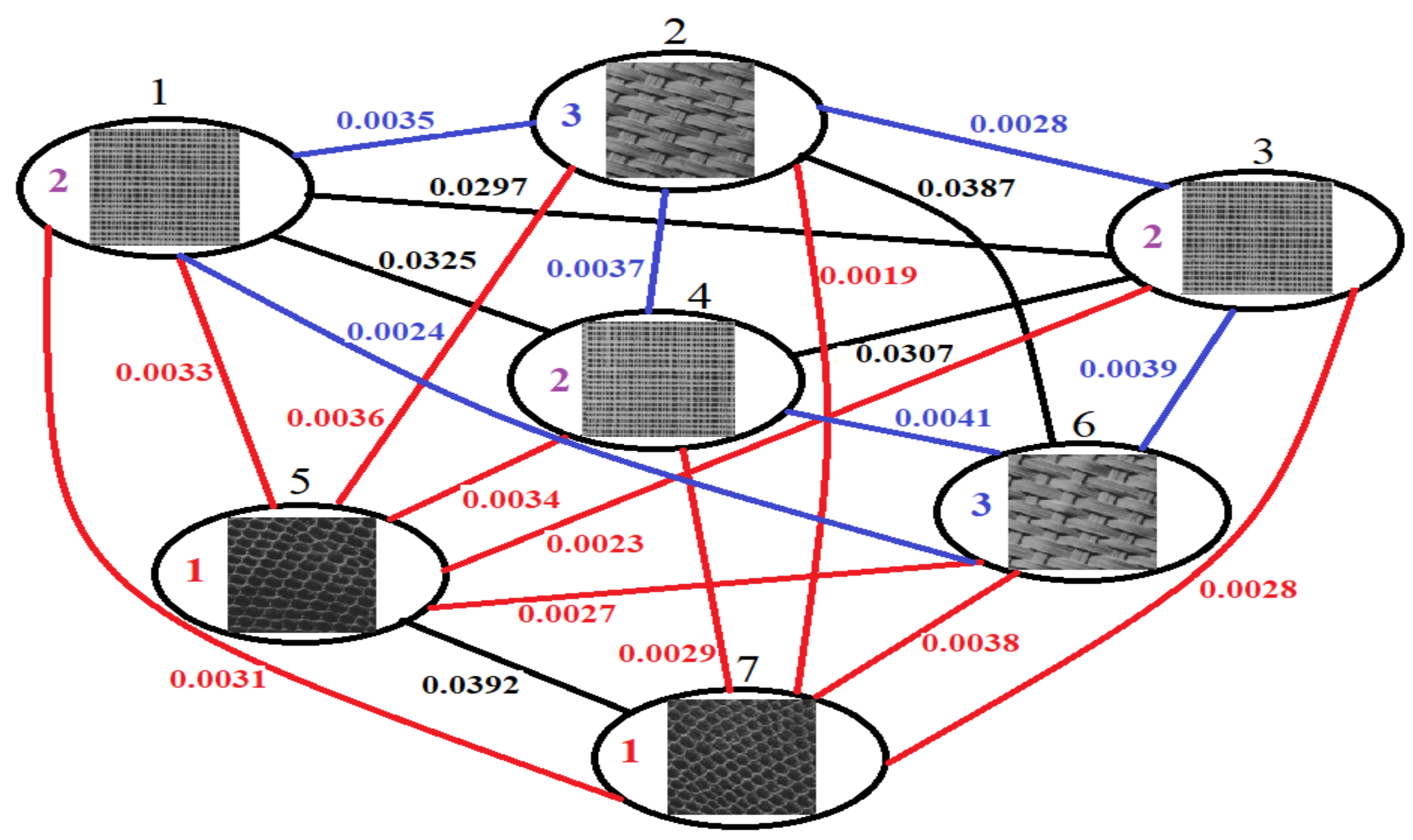
3.2. Graph Clustering-Based Automatic Texture Feature Vector Classification Technique
4. Discussion
5. Conclusions
Funding
Conflicts of Interest
References
- Fernandez, A.; Alvarez, M.X.; Bianconi, F. Texture description through histograms of equivalent patterns. J. Math. Imaging Vis. 2013, 45, 76–102. [Google Scholar] [CrossRef] [Green Version]
- Tuceryan, M. Moment-based texture segmentation. Pattern Recognit. Lett. 1994, 15, 659–668. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Aouat, S.; Ait-hammi, I.; Hamouchene, I. A new approach for texture segmentation based on the Gray level co-occurrence Matrix. Multimed. Tools Appl. 2021, 1–26. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, Z.; Li, H. Binary gabor pattern: An efficient and robust descriptor for texture classification. In Proceedings of the 19th IEEE International Conference on Image Processing, Taipei, Taiwan, 22–29 September 2012; pp. 81–84. [Google Scholar]
- Ojala, T.; Pietikainen, M.; Harwood, D. A comparative study of texture measures with classification based on featured distributions. Pattern Recognit. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- Fekri-Ershad, S. Texture classification approach based on energy variation. Int. J. Multimed. Technol. 2012, 2, 52–55. [Google Scholar]
- Liang, H.; Weller, D.S. Edge-based texture granularity detection. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3563–3567. [Google Scholar]
- Epifanio, I.; Soille, P. Morphological texture features for unsupervised and supervised segmentations of natural landscapes. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1074–1083. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Xu, Y.; Yang, X.; Ling, H.; Ji, H. A new texture descriptor using multifractal analysis in multi-orientation wavelet pyramid. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 161–168. [Google Scholar]
- Cross, G.R.; Jain, A.K. Markov random field texture models. IEEE Trans. Pattern Anal. Mach. Intell. 1983, 1, 25–39. [Google Scholar] [CrossRef]
- Mao, J.; Jain, A.K. Texture classification and segmentation using multiresolution simultaneous autoregressive models. Pattern Recognit. 1992, 25, 173–188. [Google Scholar] [CrossRef]
- Jain, A.K.; Faraokhnia, F. Unsupervised texture segmentation using Gabor filters. Pattern Recognit. 1991, 24, 1167–1186. [Google Scholar] [CrossRef] [Green Version]
- Livens, S.; Scheunders, P.; Wouver, G.; van Dyck, D. Wavelets for texture analysis, an overview. In Proceedings of the 6th International Conference on Image Processing and Its Applications, Dublin, Ireland, 14–17 July 1997; pp. 581–585. [Google Scholar]
- Arivazhagan, S.; Ganesan, L.; Priyal, S.P. Texture classification using Gabor wavelets based rotation invariant features. Pattern Recognit. Lett. 2006, 27, 1976–1982. [Google Scholar] [CrossRef]
- Shen, L.; Yin, Q. Texture classification using curvelet transform. In Proceedings of the 2009 International Symposium on Information Processing, (ISIP), San Francisco, CA, USA, 13–16 April 2009. [Google Scholar]
- Yang, P.; Yang, G. Feature extraction using dual-tree complex wavelet transform and gray level co-occurrence matrix. Neurocomputing 2016, 197, 212–220. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- Zhu, G.; Li, B.; Hong, S.; Mao, B. Texture recognition and classification based on deep learning. In Proceedings of the 6th International Conference on Advanced Cloud and Big Data (CBD), Lanzhou, China, 12–15 August 2018; pp. 344–348. [Google Scholar]
- Yan, L.; Chang, K. A new super resolution framework based on multi-task learning for remote sensing images. Sensors 2021, 21, 1743. [Google Scholar] [CrossRef]
- Schaeffer, S.E. Graph clustering. Comput. Sci. Rev. 2007, 1, 27–64. [Google Scholar] [CrossRef]
- Du, H.; Wang, Y.; Dong, X.; Cheung, Y. Texture image segmentation using spectral clustering. In HCI International 2015—Posters’ Extended Abstracts, HCI 2015; Stephanidis, C., Ed.; Communications in Computer and Information Science; Springer: Cham, Switzerland, 2015; Volume 528. [Google Scholar]
- Boulkenafet, Z.; Komulainen, J.; Feng, X.; Hadid, A. Scale space texture analysis for face anti-spoofing. In Proceedings of the International Conference on Biometrics (ICB), Halmstad, Sweden, 13–16 June 2016; pp. 1–6. [Google Scholar]
- Barbu, T. Novel Diffusion-Based Models for Image Restoration and Interpolation; Book Series: Signals and Communication Technology; Springer International Publishing: Cham, Switzerland, 2019; 126p. [Google Scholar]
- Barbu, T. Robust contour tracking model using a variational level-set algorithm. Numer. Funct. Anal. Optim. 2014, 35, 263–274. [Google Scholar] [CrossRef]
- Barbu, T. Feature keypoint-based image compression technique using a well-posed nonlinear fourth-order PDE-based model. Mathematics 2020, 8, 930. [Google Scholar] [CrossRef]
- Barbu, T. A PDE Based Model for Sonar Image and Video Denoising. In Analele Științifice ale Universității Ovidius Constanța, Seria Matematică; Ovidius University: Constanța, Romania, 2011; Volume 19, pp. 51–58. [Google Scholar]
- Johnson, P. Finite Difference for PDEs; School of Mathematics, University of Manchester: Manchester, UK, 2008. [Google Scholar]
- Porter, R.; Canagarajah, N. Gabor filters for rotation invariant texture classification. In Proceedings of the IEEE International Symposium on Circuits and Systems, Hong Kong, China, 9–12 June 1997; pp. 1193–1196. [Google Scholar]
- Barbu, T.; Ungureanu, P.; Goraș, L. Multiscale Texture Recognition using Anisotropic Diffusion-based Scale Space and Combined Rotation-invariant Feature Descriptors. Proc. Rom. Acad. Ser. A 2020, 21, 385–393. [Google Scholar]
- Barbu, T. An automatic unsupervised pattern recognition approach. Proc. Rom. Acad. Ser. A 2006, 7, 73–78. [Google Scholar]
- Barbu, T. Unsupervised SIFT-based face recognition using an automatic hierarchical agglomerative clustering solution. Procedia Comput. Sci. 2013, 22, 385–394. [Google Scholar] [CrossRef] [Green Version]
- Bollobás, B. Modern Graph Theory; Springer: Berlin/Heidelberg, Germany, 2013; Volume 184. [Google Scholar]
- Hartuv, E.; Shamir, R. A clustering algorithm based on graph connectivity. Inf. Process. Lett. 2000, 76, 175–181. [Google Scholar] [CrossRef]
- Günter, S.; Bunke, H. Self-organizing map for clustering in the graph domain. Pattern Recognit. Lett. 2002, 23, 405–417. [Google Scholar] [CrossRef]
- Yen, L.; Vanvyve, D.; Wouters, F.; Fouss, F.; Verleysen, M.; Saerens, M. Clustering using a random walk based distance measure. In Proceedings of the 13th European Symposium on Artificial Neural Networks, Bruges, Belgium, 27–29 April 2005; pp. 317–324. [Google Scholar]
- Serratosa, F.; Sanfeliu, A. Function-described graphs. Pattern Recognit. Image Anal. 1997, 1, 37–42. [Google Scholar]
- Jothi, R.; Mohanty, S.K.; Ojha, A. Fast approximate minimum spanning tree based clustering algorithm. Neurocomputing 2018, 272, 542–557. [Google Scholar] [CrossRef]
- Galluccio, L.; Michel, O.; Comon, P.; Hero, A.O., III. Graph based k-means clustering. Signal Process. 2012, 92, 1970–1984. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Han, J. Spectral clustering. Adv. Neural Inf. Process. Syst. 2004, 17, 1601–1608. [Google Scholar]
- Tsitsulin, A.; Palowitch, J.; Perozzi, B.; Müller, E. Graph clustering with graph neural networks. arXiv 2020, arXiv:2006.16904. [Google Scholar]
- Kunegis, J.; Schmidt, S.; Lommatzsch, A.; Lerner, J.; De Luca, E.W.; Albayrak, S. Spectral analysis of signed graphs for clustering, prediction and visualization. In Proceedings of the SIAM International Conference on Data Mining, Columbus, OH, USA, 29 April–1 May 2010; pp. 559–570. [Google Scholar]
- Ford, L.R.; Fulkerson, D.R. Maximal flow through a network. Can. J. Math. 1956, 8, 399–404. [Google Scholar] [CrossRef]
- Kylberg, G.; Sintorin, I. On the influence of interpolation method on rotation invariance in texture recognition. J. Image Video Process. 2016, 17. [Google Scholar] [CrossRef] [Green Version]
- Brodatz, P. Textures: A Photographic Album for Artists and Designers; Dover Publication: Mineola, NY, USA, 1966. [Google Scholar]
- Powers, D.M. Evaluation: From precision, recall and F-measure to ROC, informedness, markedness and correlation. arXiv 2020, arXiv:2010.16061. [Google Scholar]



{kind=link}
{kind=link}
| Precision | Recall | F1 | Accuracy | |
|---|---|---|---|---|
| The proposed technique | 0.9708 | 0.9752 | 0.9730 | 0.9745 |
| Proposed multi-scale feature extraction +K-means | 0.9652 | 0.9617 | 0.9634 | 0.9657 |
| Proposed multi-scale feature extraction + hierarchical agglomerative clustering | 0.9638 | 0.9624 | 0.9631 | 0.9652 |
| Moment-based feature extraction +K-means | 0.9268 | 0.9163 | 0.9215 | 0.9205 |
| Moment-based feature extraction + hierarchical agglomerative clustering | 0.9174 | 0.9197 | 0.9185 | 0.9143 |
| LBP features +K-means | 0.9345 | 0.9367 | 0.9356 | 0.9375 |
| LBP + hierarchical agglomerative clustering | 0.9459 | 0.9422 | 0.9440 | 0.9378 |
| GLCM +K-means | 0.9505 | 0.9574 | 0.9539 | 0.9547 |
| GLCM + hierarchical agglomerative clustering | 0.9578 | 0.9603 | 0.9590 | 0.9603 |
| Circularly symmetric 2D Gabor filter +K-means | 0.9647 | 0.9612 | 0.9629 | 0.9651 |
| Circularly symmetric 2D Gabor filter + hierarchical agglomerative clustering | 0.9635 | 0.9623 | 0.9629 | 0.9638 |
| 2D Gabor Wavelets +K-means | 0.9706 | 0.9736 | 0.9721 | 0.9739 |
| 2D Gabor Wavelets + hierarchical agglomerative clustering | 0.9703 | 0.9731 | 0.9717 | 0.9734 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barbu, T. Automatic Unsupervised Texture Recognition Framework Using Anisotropic Diffusion-Based Multi-Scale Analysis and Weight-Connected Graph Clustering. Symmetry 2021, 13, 925. https://doi.org/10.3390/sym13060925
Barbu T. Automatic Unsupervised Texture Recognition Framework Using Anisotropic Diffusion-Based Multi-Scale Analysis and Weight-Connected Graph Clustering. Symmetry. 2021; 13(6):925. https://doi.org/10.3390/sym13060925
Chicago/Turabian StyleBarbu, Tudor. 2021. "Automatic Unsupervised Texture Recognition Framework Using Anisotropic Diffusion-Based Multi-Scale Analysis and Weight-Connected Graph Clustering" Symmetry 13, no. 6: 925. https://doi.org/10.3390/sym13060925