
Pareto Optimality for Multioptimization of Continuous Linear Operators

 , , and
, , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Formal Description of MOPs
2.2. Characterizing Pareto Optimal Solutions
- 1.
- If there is so that is a maximal element of , then is a maximal element of . Hence, .
- 2.
- If there is so that is a maximal element of , then is a maximal element of . Hence,
2.3. MOPs in a Functional-Analysis Context
3. Results
3.1. Formatting of Mathematical Components
- 1.
- .
- 2.
- .
- 3.
- if and only if .
- Fix an element , and the associated mapping . Then,If element x is taken in the unit sphere, i.e., , and considering the previous inequalities, we concluded that .
- Let be an arbitrary element; then, Equation (6) implies thatThen, .
- Take . Before anything else, since , we have thatFollowing chain of equalities (6),Thanks to the strict convexity of space H,that is,and so . We implicitly proved that .Conversely, let us suppose that . As we remarked before, is a strongly positive operator, so the eigenvalues of that operator are real and positive. Therefore, equality holds, which implies thatTake . ThenThis chain of equalities proves that . Consequently,
3.2. Pareto Optimal Solutions of the MOP
- 1.
- 2.
- .
- According to Corollary 1 and Theorem 5,
- We rely on Theorem 6 and Corollary 1. Fix an arbitrary . If , then . Suppose that . In view of Theorem 6, . We prove that . Take any . Since , for every ,As a consequence,This means that . In accordance with Theorem 6,
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of open access journals |
| MOP | Multiobjective optimization problem |
| SOP | Single-objective optimization problem |
| POS | Pareto optimal solution |
| PC | Pareto chart |
| TMS | Transcranial magnetic stimulation |
| MRI | Magnetic resonance imaging |
| ROI | Region of interest |
Appendix A. Illustrative Example on Coil Design
Appendix A.1. Coil Design in Engineering
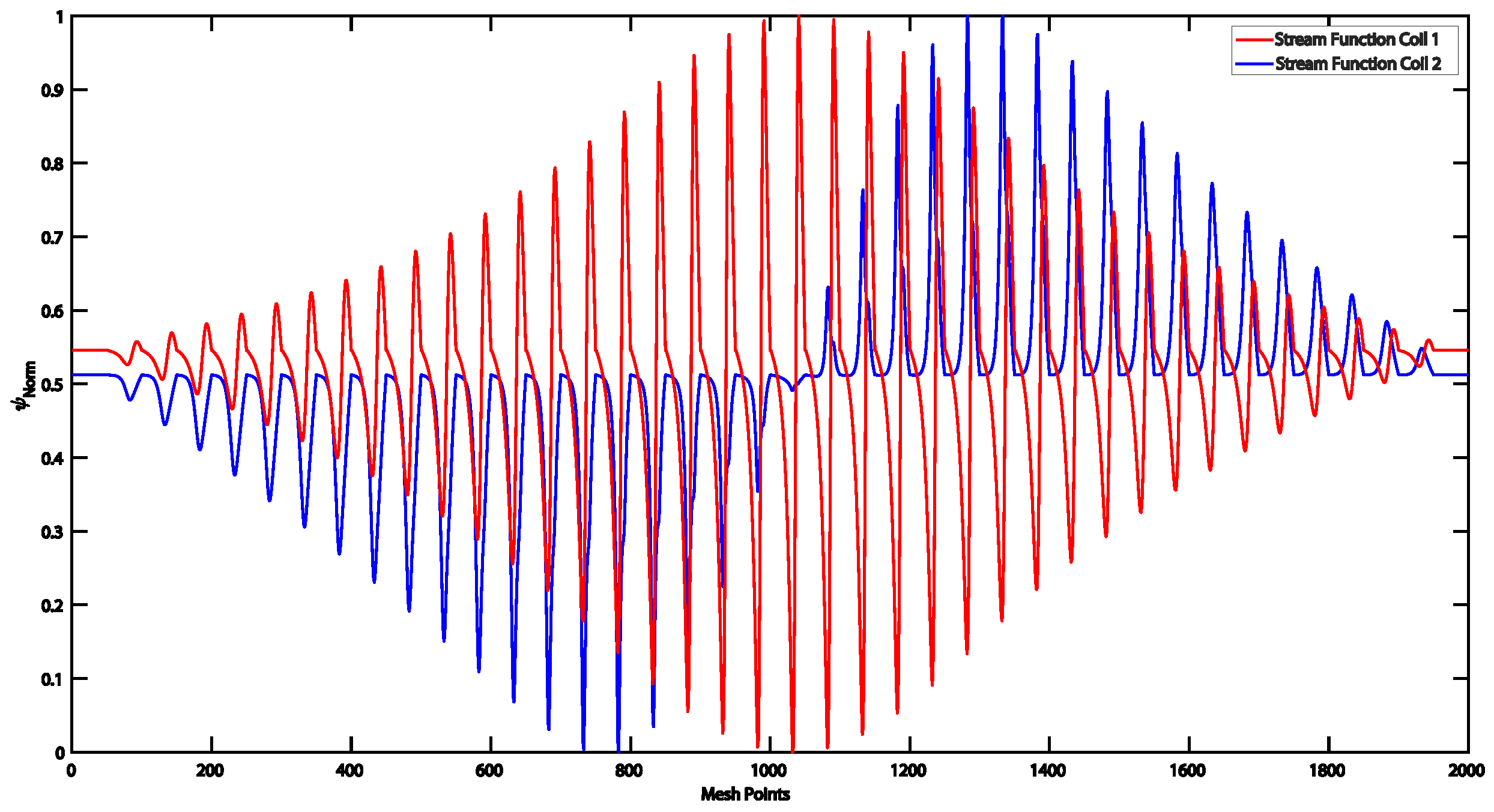
Appendix A.2. Design of Maximal Bx and By Coil for Magnetic Measurement Systems in a Space Missions


{kind=link}
{kind=link}
{kind=link}
{kind=link}


References
- Bishop, E.; Phelps, R.R. A proof that every Banach space is subreflexive. Bull. Am. Math. Soc. 1961, 67, 97–98. [Google Scholar] [CrossRef] [Green Version]
- Bishop, E.; Phelps, R.R. The support functionals of a convex set. In Sympos. Pure Mathematics; American Mathematical Society: Providence, RI, USA, 1963; Volume VII, pp. 27–35. [Google Scholar]
- Aizpuru, A.; García-Pacheco, F.J. A short note about exposed points in real Banach spaces. Acta Math. Sci. Ser. B (Engl. Ed.) 2008, 28, 797–800. [Google Scholar] [CrossRef]
- Cobos-Sánchez, C.; García-Pacheco, F.J.; Moreno-Pulido, S.; Sáez-Martínez, S. Supporting vectors of continuous linear operators. Ann. Funct. Anal. 2017, 8, 520–530. [Google Scholar] [CrossRef]
- García-Pacheco, F.J.; Naranjo-Guerra, E. Supporting vectors of continuous linear projections. Int. J. Funct. Anal. Oper. Theory Appl. 2017, 9, 85–95. [Google Scholar] [CrossRef]
- James, R.C. Characterizations of reflexivity. Stud. Math. 1964, 23, 205–216. [Google Scholar] [CrossRef] [Green Version]
- Lindenstrauss, J. On operators which attain their norm. Isr. J. Math. 1963, 1, 139–148. [Google Scholar] [CrossRef]
- García-Pacheco, F.J.; Rambla-Barreno, F.; Seoane-Sepúlveda, J.B. Q-linear functions, functions with dense graph, and everywhere surjectivity. Math. Scand. 2008, 102, 156–160. [Google Scholar] [CrossRef] [Green Version]
- García-Pacheco, F.J.; Puglisi, D. Lineability of functionals and operators. Stud. Math. 2010, 201, 37–47. [Google Scholar] [CrossRef]
- García-Pacheco, F.J. Lineability of the set of supporting vectors. Rev. R. Acad. Cienc. Exactas Fís. Nat. Ser. A Mat. RACSAM 2021, 115, 41. [Google Scholar] [CrossRef]
- Mititelu, C. Optimality and duality for invex multi-time control problems with mixed constraints. J. Adv. Math. Stud. 2009, 2, 25–34. [Google Scholar]
- Mititelu, C.; Treanţă, S. Efficiency conditions in vector control problems governed by multiple integrals. J. Appl. Math. Comput. 2018, 57, 647–665. [Google Scholar] [CrossRef]
- Treanţă, S.; Mititelu, C. Duality with (ρ,b)-quasiinvexity for multidimensional vector fractional control problems. J. Inf. Optim. Sci. 2019, 40, 1429–1445. [Google Scholar] [CrossRef]
- Treanţă, S.; Mititelu, C. Efficiency for variational control problems on Riemann manifolds with geodesic quasiinvex curvilinear integral functionals. Rev. R. Acad. Cienc. Exactas Fís. Nat. Ser. A Mat. RACSAM 2020, 114. [Google Scholar] [CrossRef]
- Choi, J.W.; Kim, M.K. Multi-Objective Optimization of Voltage-Stability Based on Congestion Management for Integrating Wind Power into the Electricity Market. Appl. Sci. 2017, 7, 573. [Google Scholar] [CrossRef] [Green Version]
- Susowake, Y.; Masrur, H.; Yabiku, T.; Senjyu, T.; Motin Howlader, A.; Abdel-Akher, M.; Hemeida, A.M. A Multi-Objective Optimization Approach towards a Proposed Smart Apartment with Demand-Response in Japan. Energies 2019, 13, 127. [Google Scholar] [CrossRef] [Green Version]
- Zavala, G.R.; García-Nieto, J.; Nebro, A.J. Qom—A New Hydrologic Prediction Model Enhanced with Multi-Objective Optimization. Appl. Sci. 2019, 10, 251. [Google Scholar] [CrossRef] [Green Version]
- Cobos Sánchez, C.; Garcia-Pacheco, F.J.; Guerrero Rodriguez, J.M.; Hill, J.R. An inverse boundary element method computational framework for designing optimal TMS coils. Eng. Anal. Bound. Elem. 2018, 88, 156–169. [Google Scholar] [CrossRef]
- Garcia-Pacheco, F.J.; Cobos-Sanchez, C.; Moreno-Pulido, S.; Sanchez-Alzola, A. Exact solutions to max‖x‖=1∑i=1∞‖Ti(x)‖2 with applications to Physics, Bioengineering and Statistics. Commun. Nonlinear Sci. Numer. Simul. 2020, 82, 105054. [Google Scholar] [CrossRef]
- Moreno-Pulido, S.; Garcia-Pacheco, F.J.; Cobos-Sanchez, C.; Sanchez-Alzola, A. Exact Solutions to the Maxmin Problem max‖Ax‖ Subject to ‖Bx‖ ≤ 1. Mathematics 2020, 8, 85. [Google Scholar] [CrossRef] [Green Version]
- Wassermann, E.; Epstein, C.; Ziemann, U.; Walsh, V. Oxford Handbook of Transcranial Stimulation (Oxford Handbooks), 1st ed.; Oxford University Press: New York, NY, USA, 2008. [Google Scholar]
- Romei, V.; Murray, M.M.; Merabet, L.B.; Thut, G. Occipital Transcranial Magnetic Stimulation Has Opposing Effects on Visual and Auditory Stimulus Detection: Implications for Multisensory Interactions. J. Neurosci. 2007, 27, 11465–11472. [Google Scholar] [CrossRef]
- Sánchez, C.C.; Rodriguez, J.M.G.; Olozábal, Á.Q.; Blanco-Navarro, D. Novel TMS coils designed using an inverse boundary element method. Phys. Med. Biol. 2016, 62, 73–90. [Google Scholar] [CrossRef]
- Marin, L.; Power, H.; Bowtell, R.W.; Cobos Sanchez, C.; Becker, A.A.; Glover, P.; Jones, I.A. Numerical solution of an inverse problem in magnetic resonance imaging using a regularized higher-order boundary element method. In Boundary Elements and Other Mesh Reduction Methods XXIX, WIT Trans. Model. Simul.; WIT Press: Southampton, UK, 2007; Volume 44, pp. 323–332. [Google Scholar] [CrossRef] [Green Version]
- Marin, L.; Power, H.; Bowtell, R.W.; Cobos Sanchez, C.; Becker, A.A.; Glover, P.; Jones, A. Boundary element method for an inverse problem in magnetic resonance imaging gradient coils. CMES Comput. Model. Eng. Sci. 2008, 23, 149–173. [Google Scholar]
- Mateos, I.; Ramos-Castro, J.; Lobo, A. Low-frequency noise characterization of a magnetic field monitoring system using an anisotropic magnetoresistance. Sens. Actuators A Phys. 2015, 235, 57–63. [Google Scholar] [CrossRef] [Green Version]
- Mateos, I.; Patton, B.; Zhivun, E.; Budker, D.; Wurm, D.; Ramos-Castro, J. Noise characterization of an atomic magnetometer at sub-millihertz frequencies. Sens. Actuators A Phys. 2015, 224, 147–155. [Google Scholar] [CrossRef] [Green Version]
- Mateos, I.; Sánchez-Mínguez, R.; Ramos-Castro, J. Design of a CubeSat payload to test a magnetic measurement system for space-borne gravitational wave detectors. Sens. Actuators A Phys. 2018, 273, 311–316. [Google Scholar] [CrossRef] [Green Version]
- Mateos, I.; Díaz-Aguiló, M.; Ramos-Castro, J.; García-Berro, E.; Lobo, A. Interpolation of the magnetic field at the test masses in eLISA. Class. Quantum Gravity 2015, 32, 165003. [Google Scholar] [CrossRef] [Green Version]
- Peeren, G. Stream function approach for determining optimal surface currents. J. Comput. Phys. 2003, 191, 305–321. [Google Scholar] [CrossRef] [Green Version]
- Brideson, M.; Forbes, L.; Crozier, S. Determining complicated winding patterns for Shim coils using stream functions and the target-field method. Concepts Magn. Reson. 2002, 14, 9–18. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cobos-Sánchez, C.; Vilchez-Membrilla, J.A.; Campos-Jiménez, A.; García-Pacheco, F.J. Pareto Optimality for Multioptimization of Continuous Linear Operators. Symmetry 2021, 13, 661. https://doi.org/10.3390/sym13040661
Cobos-Sánchez C, Vilchez-Membrilla JA, Campos-Jiménez A, García-Pacheco FJ. Pareto Optimality for Multioptimization of Continuous Linear Operators. Symmetry. 2021; 13(4):661. https://doi.org/10.3390/sym13040661
Chicago/Turabian StyleCobos-Sánchez, Clemente, José Antonio Vilchez-Membrilla, Almudena Campos-Jiménez, and Francisco Javier García-Pacheco. 2021. "Pareto Optimality for Multioptimization of Continuous Linear Operators" Symmetry 13, no. 4: 661. https://doi.org/10.3390/sym13040661