
Implementation and Evaluation of Physical, Hybrid, and Virtual Testbeds for Cybersecurity Analysis of Industrial Control Systems

 ,
,  , , and
, , and
Abstract
:1. Introduction
1.1. Research Questions
1.2. Contribution
1.3. Organization of the Paper
2. Related Work
2.1. Physical Testbeds
2.2. Hybrid Testbeds
2.3. Virtual Testbeds
3. Testbed Design and Implementation
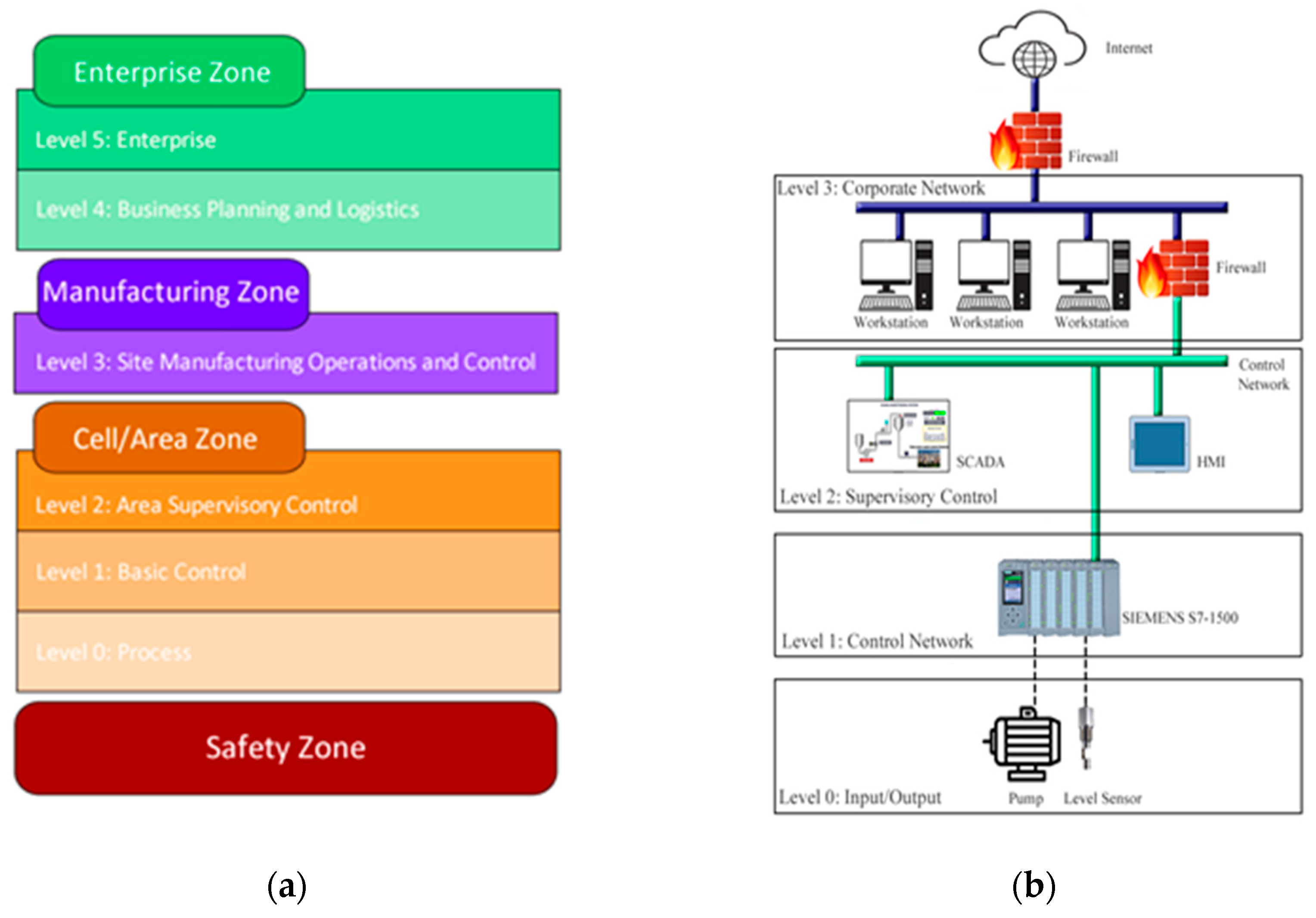
3.1. ICS Architecture
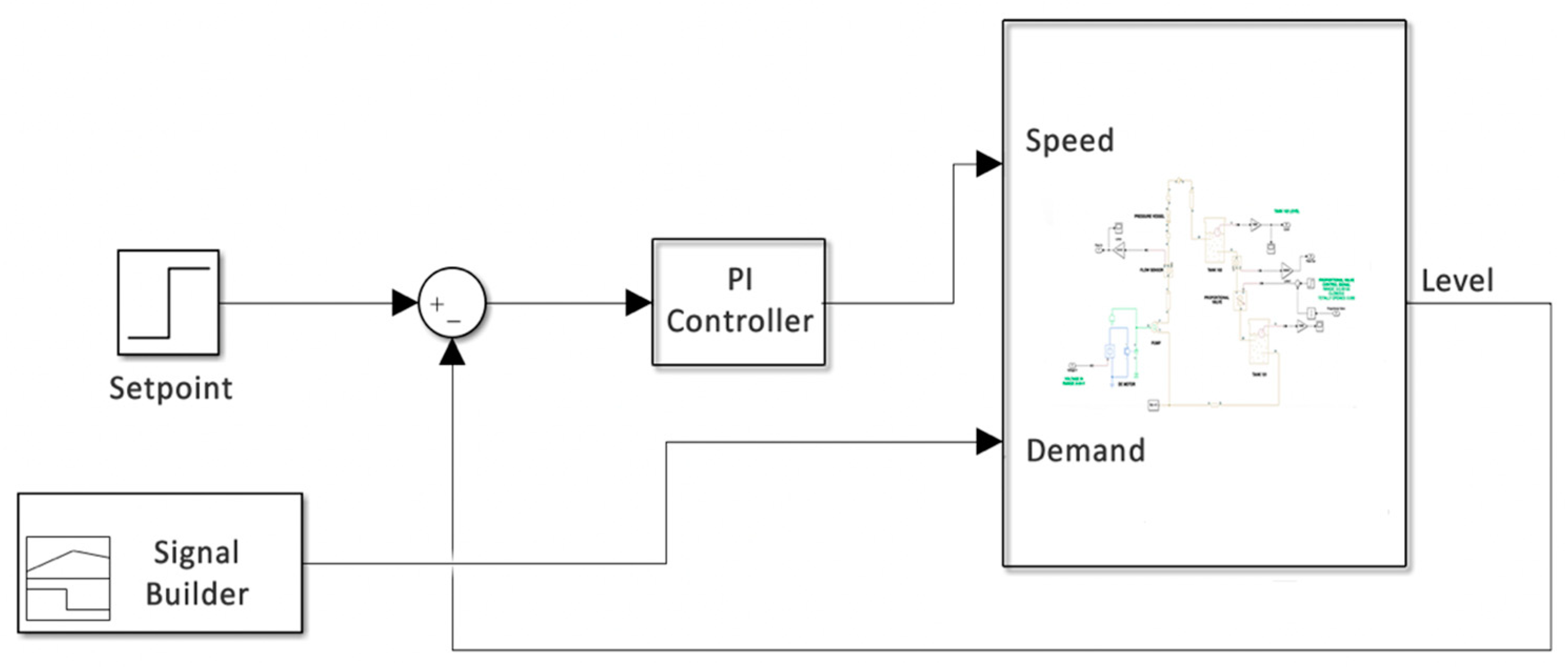
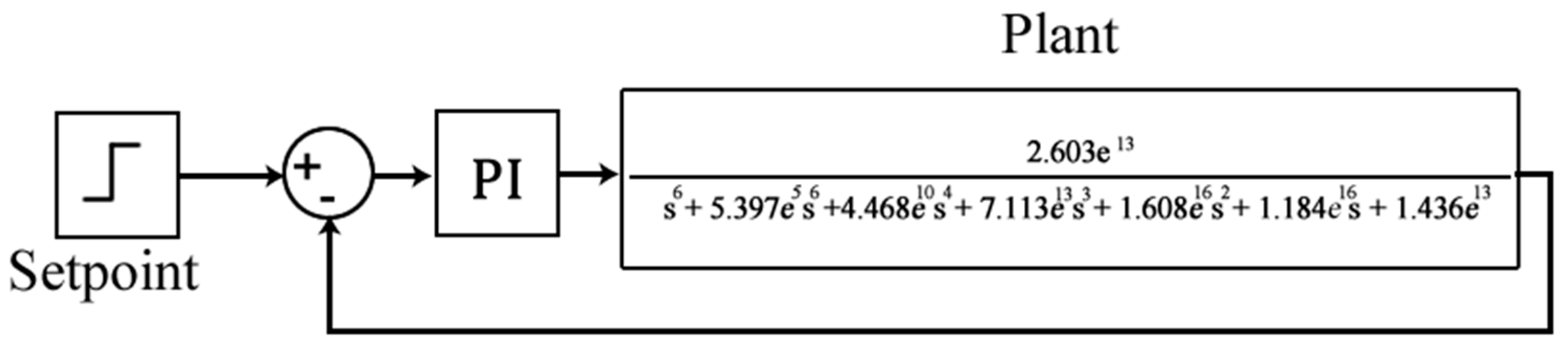
3.2. Virtual Plant
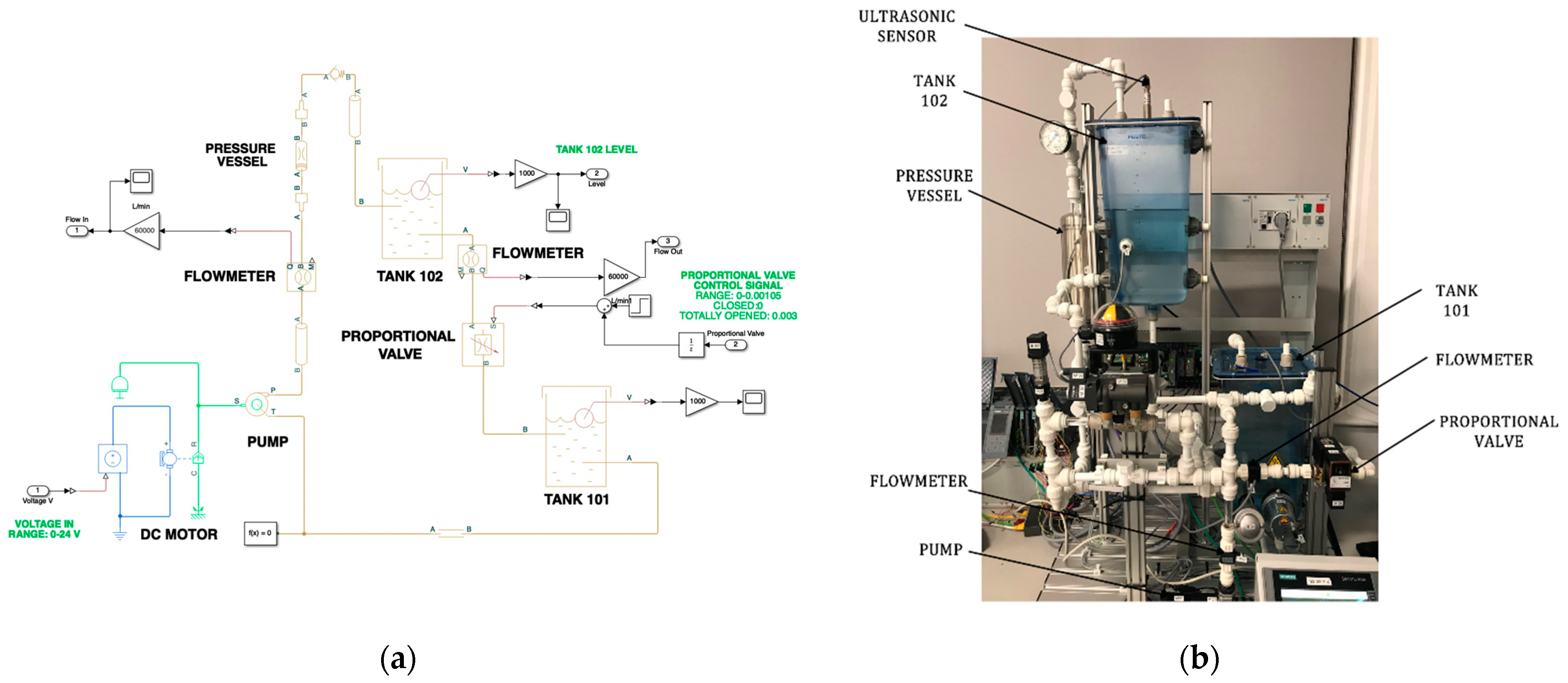
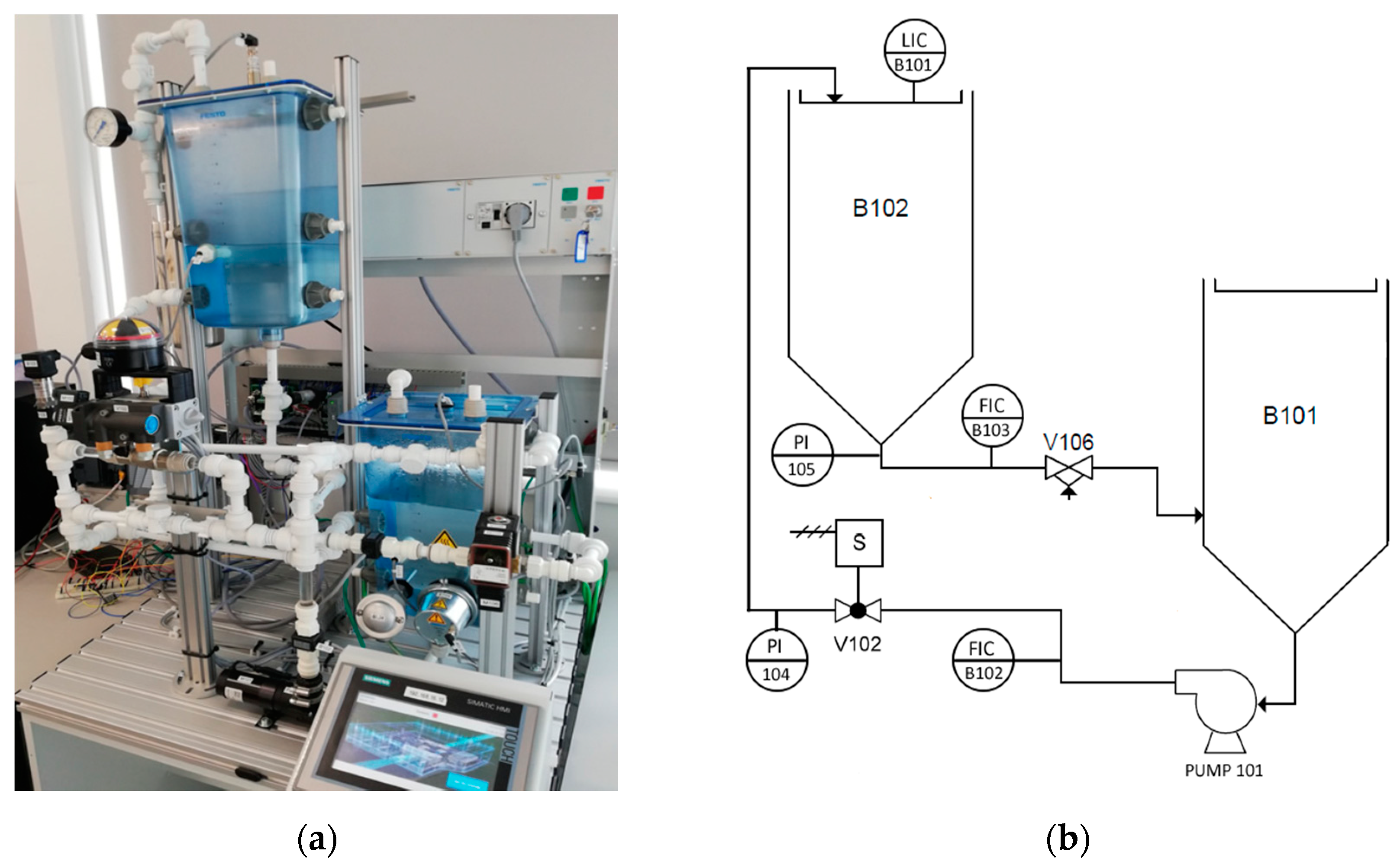
3.3. Physical Testbed (CWSS-P)
- One Ultrasonic sensor.
- Two Flowmeters.
- Two Pressure Sensors.
- One Pump.
- One Solenoid Valve.
- One Proportional Valve.
- SCADA system running Windows 10.
- Siemens HMI.
- An attacker machine running Kali OS.
3.3.1. Normal Operation
3.3.2. PLC Programming
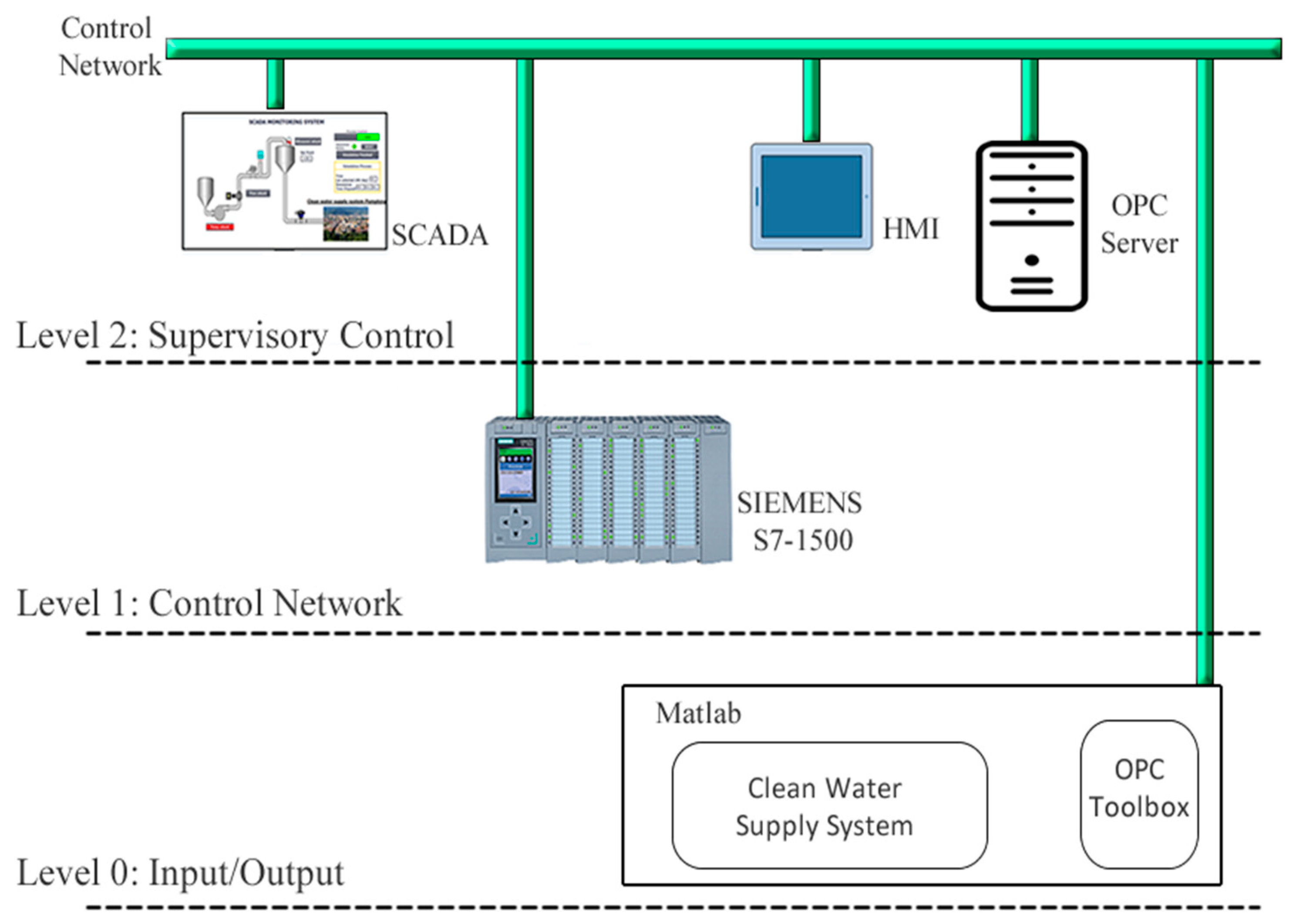
3.4. Hybrid Testbed (CWSS-H)
OPC Server and Client
3.5. Virtual Testbed (CWSS-V)
4. Testbed Evaluation
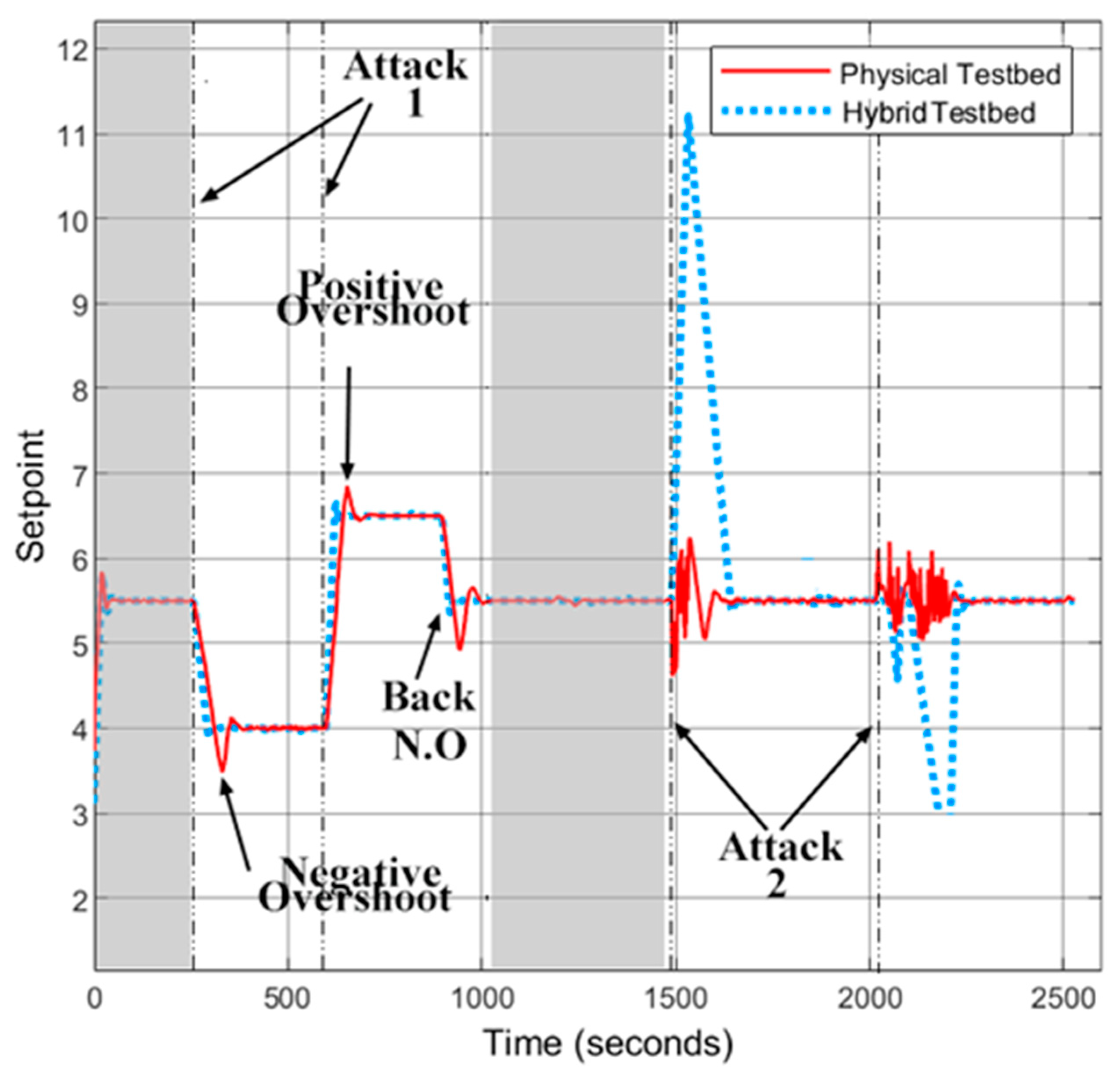
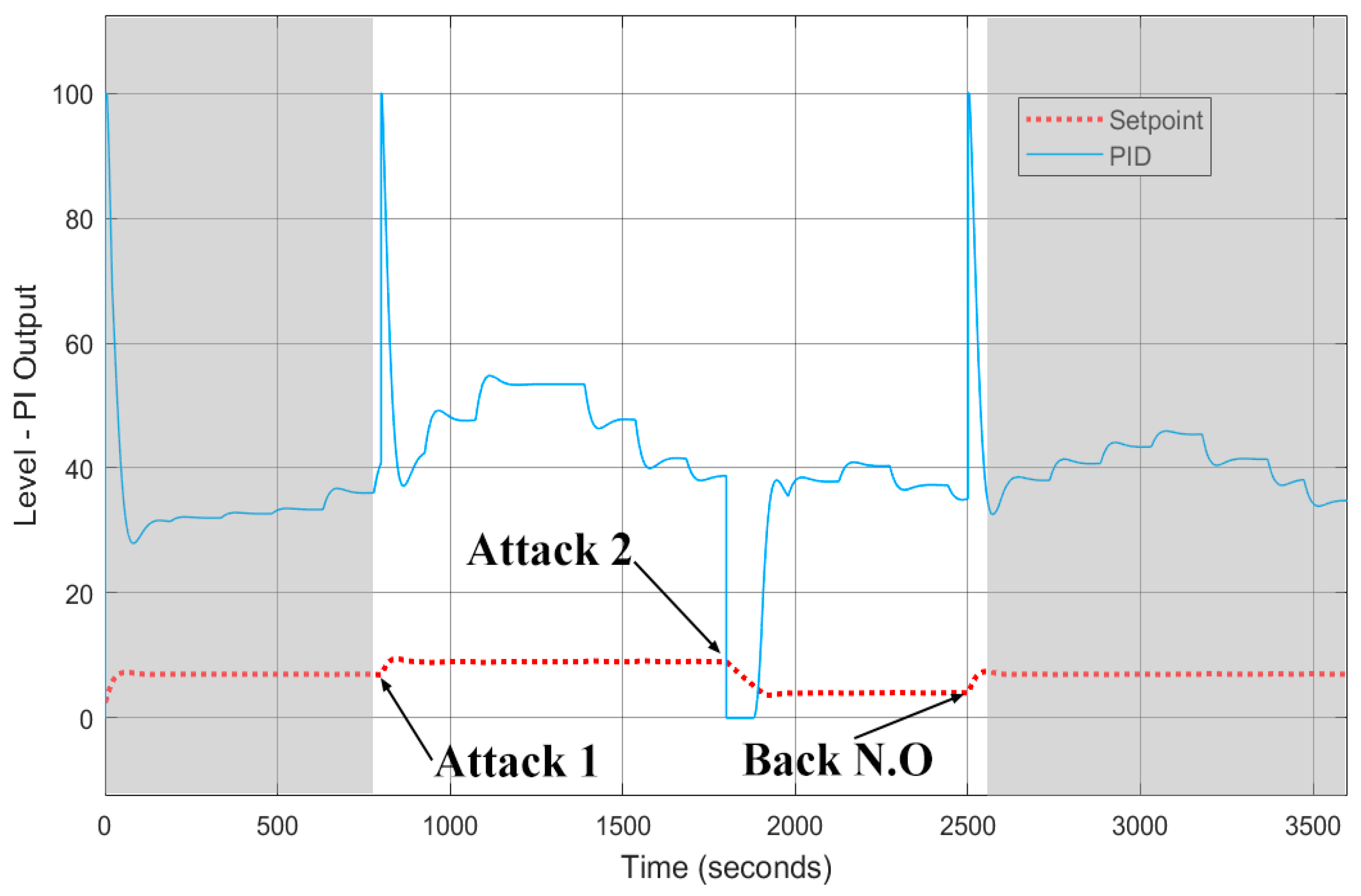
4.1. Attack Scenarios
4.2. Physical and Hybrid Testbeds
4.3. Virtual Testbed
5. Discussion
5.1. Research Questions
5.2. Testbed Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kamel, K.; Kamel, E. Introduc tion to PLC control systems and automation. In Programmable Logic Controllers: Industrial Control; McGraw-Hill Education: New York, NY, USA, 2014; pp. 1–31. [Google Scholar]
- Critical National Infrastructure. Available online: https://www.cpni.gov.uk/critical-national-infrastructure-0 (accessed on 7 October 2020).
- Critical Infrastructure Sectors. Available online: https://www.cisa.gov/critical-infrastructure-sectors (accessed on 5 October 2020).
- Langner, R. Stuxnet: Dissecting a Cyberwarfare Weapon. IEEE Secur. Priv. Mag. 2011, 9, 49–51. [Google Scholar] [CrossRef]
- Mathur, A.P.; Tippenhauer, N.O. SWaT: A water treatment testbed for research and training on ICS security. In Proceedings of the 2016 International Workshop on Cyber-physical Systems for Smart Water Networks (CySWater), Vienna, Austria, 11 April 2016; pp. 31–36. [Google Scholar]
- Ahmed, C.M.; Palleti, V.R.; Mathur, A.P. WADI: A water distribution testbed for research in the design of secure cyber physi-cal systems. In CySWATER ’17: Proceedings of the 3rd International Workshop on Cyber-Physical Systems for Smart Water Networks, Pittsburgh, PA, USA, 21 April 2017; ACM: New York, NY, USA, 2017; pp. 25–28. [Google Scholar]
- Secure Water Treatment. Available online: https://itrust.sutd.edu.sg/testbeds/secure-water-treatment-swat/ (accessed on 21 September 2020).
- Miciolino, E.E.; Bernieri, G.; Pascucci, F.; Setola, R. Communications network analysis in a SCADA system testbed under cyber-attacks. In Proceedings of the 2015 23rd Telecommunications Forum Telfor (TELFOR), Belgrade, Serbia, 24–26 November 2015; Volume 7, pp. 341–344. [Google Scholar]
- Ahmed, I.; Roussev, V.; Johnson, W.; Senthivel, S.; Sudhakaran, S. A SCADA System Testbed for Cybersecurity and Forensic Research and Pedagogy. In Proceedings of the 2nd Annual Industrial Control System Security Workshop on—ICSS ’16, Los Angeles, CA, USA, 6 December 2016; ACM: New York, NY, USA, 2016; Volume 16, pp. 1–9. [Google Scholar]
- Siemens S7-300/400 PLC Vulnerabilities (Update E). Available online: https://www.us-cert.gov/ics/advisories/ICSA-16-348-05 (accessed on 21 October 2019).
- Keliris, A.; Salehghaffari, H.; Cairl, B.; Krishnamurthy, P.; Maniatakos, M.; Khorrami, F. Machine learning-based defense against process-aware attacks on Industrial Control Systems. In Proceedings of the 2016 IEEE International Test Conference (ITC), Fort Worth, TX, USA, 15–17 November 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Rosa, L.; Cruz, T.; Simoes, P.; Monteiro, E.; Lev, L. Attacking SCADA systems: A practical perspective. In Proceedings of the 2017 IFIP/IEEE Symposium on Integrated Network and Service Management (IM), Lisbon, Portugal, 8–12 May 2017; pp. 741–746. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, W.; Wang, F.; Chang, R. VTET: A Virtual Industrial Control System Testbed for Cyber Security Research. In Proceedings of the 2018 Third International Conference on Security of Smart Cities, Industrial Control System and Communications (SSIC), Shanghai, China, 18–19 October 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Ghaleb, A.; Zhioua, S.; Almulhem, A. SCADA-SST: A SCADA security testbed. In Proceedings of the 2016 World Congress on Industrial Control Systems Security (WCICSS), London, UK, 2–14 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Tesfahun, A.; Bhaskari, D.L. A SCADA testbed for investigating cyber security vulnerabilities in critical infrastructures. Autom. Control. Comput. Sci. 2016, 50, 54–62. [Google Scholar] [CrossRef]
- Almalawi, A.; Tari, Z.; Khalil, I.; Fahad, A.; Khalil, I. SCADAVT-A framework for SCADA security testbed based on virtualization technology. In Proceedings of the 38th Annual IEEE Conference on Local Computer Networks, Sydney, NSW, Australia, 21–24 October 2013; pp. 639–646. [Google Scholar]
- Rossman, L.A. Epanet 2. September 2000. p. 104. Available online: https://www.microimages.com/documentation/Tutorials/Epanet2UserManual.pdf (accessed on 15 October 2019).
- Hadiosmanovio, D.; Sommer, R.; Zambon, E.; Hartel, P.H. Through the eye of the PLC: Semantic security monitoring for industrial processes. In Proceedings of the 30th Annual Computer Security Applications Conference, Orleans, LA, USA, 8–12 December 2014; ACM: New York, NY, USA, 2014; pp. 126–135. [Google Scholar]
- Mallouhi, M.; Al-Nashif, Y.; Cox, D.C.; Chadaga, T.; Hariri, S. A testbed for analyzing security of SCADA control systems (TASSCS). In ISGT 2011, Anaheim, CA, USA, 17–19 January 2011; IEEE: New York, NY, USA, 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Phinney, T. IEC 62443: Industrial Network and System Security, Isa. 2006. Available online: https://www.isa.org/getmedia/b75b5611-1fa8-4807-99e5-d8707b7cff18/Phinneydone.pdf (accessed on 15 October 2019).
- Luzia, K.; Cole, B.; Allen, P.; Clark, J.; Jones, A.; Lawrence, J.; Burns, L.S.; Thomas, T.; Wallace, J.; Wallace, J. Good Practice Guide. 2015. Available online: https://ltr.edu.au/resources/ID12-2470_ACU_Thomas_Geography%20-%20Good%20Practice%20Guide.pdf (accessed on 15 October 2019).
- Ogundokun, A.; Zavarsky, P.; Swar, B. Cybersecurity assurance control baselining for smart grid communication systems. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Stouffer, K.; Pillitteri, V.; Lightman, S.; Abrams, M.; Hahn, A. Guide to Industrial Control Systems (ICS) Security. 2015. Available online: https://www.nist.gov/publications/guide-industrial-control-systems-ics-security (accessed on 15 October 2019).
- Obregon, L.; Filkins, B. Secure Architecture for Industrial Control Systems. 2020. Available online: https://www.semanticscholar.org/paper/Secure-Architecture-for-Industrial-Control-Systems-Obregon-Filkins/f13663f1760d269e87f6d7e5e8fef360fe6b1853 (accessed on 15 October 2019).
- Kollár, I.; Pintelon, R.; Schoukens, J. Frequency Domain System Identification Toolbox for MATLAB. IFAC Proc. Vol. 1991, 24, 1243–1247. [Google Scholar] [CrossRef]
- MPS PA Compact Workstation with Level, Flow Rate, Pressure and Temperature Controlled Systems. Available online: https://www.festo-didactic.co.uk/gb-en/learning-systems/process-automation/compact-workstation/mps-pa-com-pact-workstation-with-level,flow-rate,pressure-and-temperature-controlled-systems.htm?fbid=Z2IuZW4uNTUwLjE3LjE4Ljg4Mi40Mzc2 (accessed on 7 July 2018).
- Our Fastest Controller for Automation. Available online: https://www.siemens.com/global/en/home/products/automation/systems/industrial/plc/simatic-s7-1500.html (accessed on 9 November 2015).
- Robles-Durazno, A.; Moradpoor, N.; McWhinnie, J.; Russell, G.; Maneru-Marin, I. PLC memory attack detection and response in a clean water supply system. Int. J. Crit. Infrastruct. Prot. 2019, 26, 100300. [Google Scholar] [CrossRef]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control. Syst. Technol. 2005, 13, 559–576. [Google Scholar] [CrossRef] [Green Version]
- Industrial Control Systems. Available online: https://www.us-cert.gov/ics (accessed on 15 May 2020).
- Vardar, E.; Giraz, A.H.; Örenbaş, H.; Şahin, S. OPC server based and real time motor speed control with PLC communication system. In Proceedings of the 26th IEEE Signal Processing and Communications Applications Conference (SIU), Izmir, Turkey, 2–5 May 2018; pp. 1–4. [Google Scholar]
- OPC Toolbox 2020. Available online: https://uk.mathworks.com/products/opc.html (accessed on 8 October 2019).
- Packet Crafting, Scapy and S7-1500 PLC. Available online: https://github.com/andrex17/ics (accessed on 6 April 2019).
- Robles-Durazno, A.; Moradpoor, N.; McWhinnie, J.; Russell, G.; Maneru-Marin, I. Implementation and Detection of Novel Attacks to the PLC Memory of a Clean Water Supply System. In Communications in Computer and Information Science; Springer: Cham, Germany, 2018; Volume 895, pp. 91–103. [Google Scholar]
- Robles-Durazno, A.; Moradpoor, N.; McWhinnie, J.; Russell, G. WaterLeakage: A Stealthy Malware for Data Exfiltration on Industrial Control Systems Using Visual Channels*. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; pp. 724–731. [Google Scholar]
- Nyasore, O.N.; Zavarsky, P.; Swar, B.; Naiyeju, R.; Dabra, S. Deep Packet Inspection in Industrial Automation Control System to Mitigate Attacks Exploiting Modbus/TCP Vulnerabilities. In Proceedings of the 2020 IEEE 6th Intl Conference on Big Data Security on Cloud (BigDataSecurity), IEEE Intl Conference on High Performance and Smart Computing, (HPSC) and IEEE Intl Conference on Intelligent Data and Security (IDS), Baltimore, MD, USA, 25–27 May 2020; pp. 241–245. [Google Scholar]
- Wenqian, F.; Yingxu, L.; Zenghui, L. Vulnerability mining for Modbus TCP based on exception field positioning. Simul. Model. Pract. Theory 2020, 102, 101989. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Technique | Sensor (s) | Tag |
|---|---|---|
| PID | Ultrasonic sensor | LIC/B101 |
| PID | Pressure out | PI/105 |
| Cascade | Flow In/Ultrasonic sensor | FIC/B102–LIC/B101 |
| Cascade | Flow In/Pressure out | FIC/B102–PI/105 |
| FeedForward | Flow In/Flow Out | FIC/B102–FIC/B103 |
| Type | Components | Network Protocol | Attack Vector | |
|---|---|---|---|---|
| CWSS: Clean Water Supply System (our research) | Physical | PLC, SCADA, HMI | Profinet, TCP/IP | Packet Crafting, PLC memory corruption |
| SWaT: six-stage water treatment process [7] | Physical | PLCs, HMIs, SCADA, RTUs, Wireless Sensors | CIP over Ethernet/IP, Ethernet/IP | Man-In-The-Middle, ARP Spoofing |
| FACIES: water distribution system [8] | Physical | PLCs, SCADA. | TCP/IP, Modbus/TCP | ARP Spoofing, Man-In-The-Middle |
| WADI: A Water Distribution Testbed for Research [6] | Physical | PLC, HMI, RTUs, SCADA | Ethernet | Packet delay variation, variable packet loss |
| Water treatment process [9] | Physical | PLC, SCADA-HMI | Modbus, Profinet | Unclear |
| HITL Testbed: Tennessee Eastman (TE) chemical process [11] | Hybrid | Process modelled in MATLAB. Physical PLC, SCADA, RTIB, SIB | Serial-Interface Board | ARP Spoofing, False Data Injection |
| CWSS-H: Hybrid Clean Water Supply System (our research) | Hybrid | Process modelled in MATLAB. Physical PLC. OPC Server. | TCP/IP | Packet Crafting, PLC memory corruption |
| HEDVa: Hybrid Environment for Design and Validation [12] | Hybrid | Uses an agent-based grid simulation model. Real PLC and SCADA. | Modbus TCP/IP | ARP Spoofing, Man In The Middle |
| Hybrid implementation of a water distribution system [14] | Hybrid | PLC, RTU, two tanks, virtual plant | Modbus TCP/IP | DoS, ARP Spoofing |
| VTET: A Virtual Industrial Control System Testbed for Cyber Security Research [13] | Virtual Hybrid | Virtual PLC, PC, Physical PLC. | OPC-S7-Modbus TCP/IP | DoS Attack |
| Water purification plant [18] | Virtual | PLC, HMI, a virtual tank, heater, two valves, level and temperature sensor | Modbus TCP | Man-In-The-Middle, reconnaissance attacks |
| Water Distribution System [15] | Virtual | Virtual Machines: RTU, MTU, HMI | Modbus TCP | DoS Attack, ARP Spoofing |
| TASSCS: A Testbed for analysing security of SCADA control systems [19] | Virtual | HMI, PLC, three virtual water tanks | Modbus | Man-In-The-Middle, DoS |
| SCADAVT-A Framework for building SCADA [16] | Virtual | Three computers: HMI, PG, IED. | IEC 60870-5 | Man-In-The-Middle, ARP Spoofing |
| CWSS-V: Virtual Clean Water Supply System (our research) | Virtual | Process fully modelled in MATLAB including PID controller. | NA | False Data Injection |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Robles-Durazno, A.; Moradpoor, N.; McWhinnie, J.; Russell, G.; Porcel-Bustamante, J. Implementation and Evaluation of Physical, Hybrid, and Virtual Testbeds for Cybersecurity Analysis of Industrial Control Systems. Symmetry 2021, 13, 519. https://doi.org/10.3390/sym13030519
Robles-Durazno A, Moradpoor N, McWhinnie J, Russell G, Porcel-Bustamante J. Implementation and Evaluation of Physical, Hybrid, and Virtual Testbeds for Cybersecurity Analysis of Industrial Control Systems. Symmetry. 2021; 13(3):519. https://doi.org/10.3390/sym13030519
Chicago/Turabian StyleRobles-Durazno, Andres, Naghmeh Moradpoor, James McWhinnie, Gordon Russell, and Jorge Porcel-Bustamante. 2021. "Implementation and Evaluation of Physical, Hybrid, and Virtual Testbeds for Cybersecurity Analysis of Industrial Control Systems" Symmetry 13, no. 3: 519. https://doi.org/10.3390/sym13030519