
Primal-Dual Splitting Algorithms for Solving Structured Monotone Inclusion with Applications

Abstract
:1. Introduction
2. Preliminaries
3. Main Results
- (i)
- is maximally monotone.
- (ii)
- is monotone and l-Lipschitzian, where
- (iii)
- is -cocoercive.
- (iv)
- For any , is a solution to Problem 2, if and only if .
3.1. Primal-Dual Forward–Backward Splitting Type Algorithm
- (i)
- , where ;
- (ii)
- , where is defined by
- (iii)
- .
3.2. Primal-Dual Forward–Backward-Half–Forward Splitting Type Algorithm
3.3. Applications to Convex Minimization Problems
| Algorithm 1: Primal-dual forward–backward splitting type algorithm for solving (36) |
| Let , and for any , let and Define
|
| Algorithm 2: Primal-dual forward–backward-half–forward splitting type algorithm for solving (36) |
| Let , where , l is defined by (16), and . Let , and for any , let and . Set
|
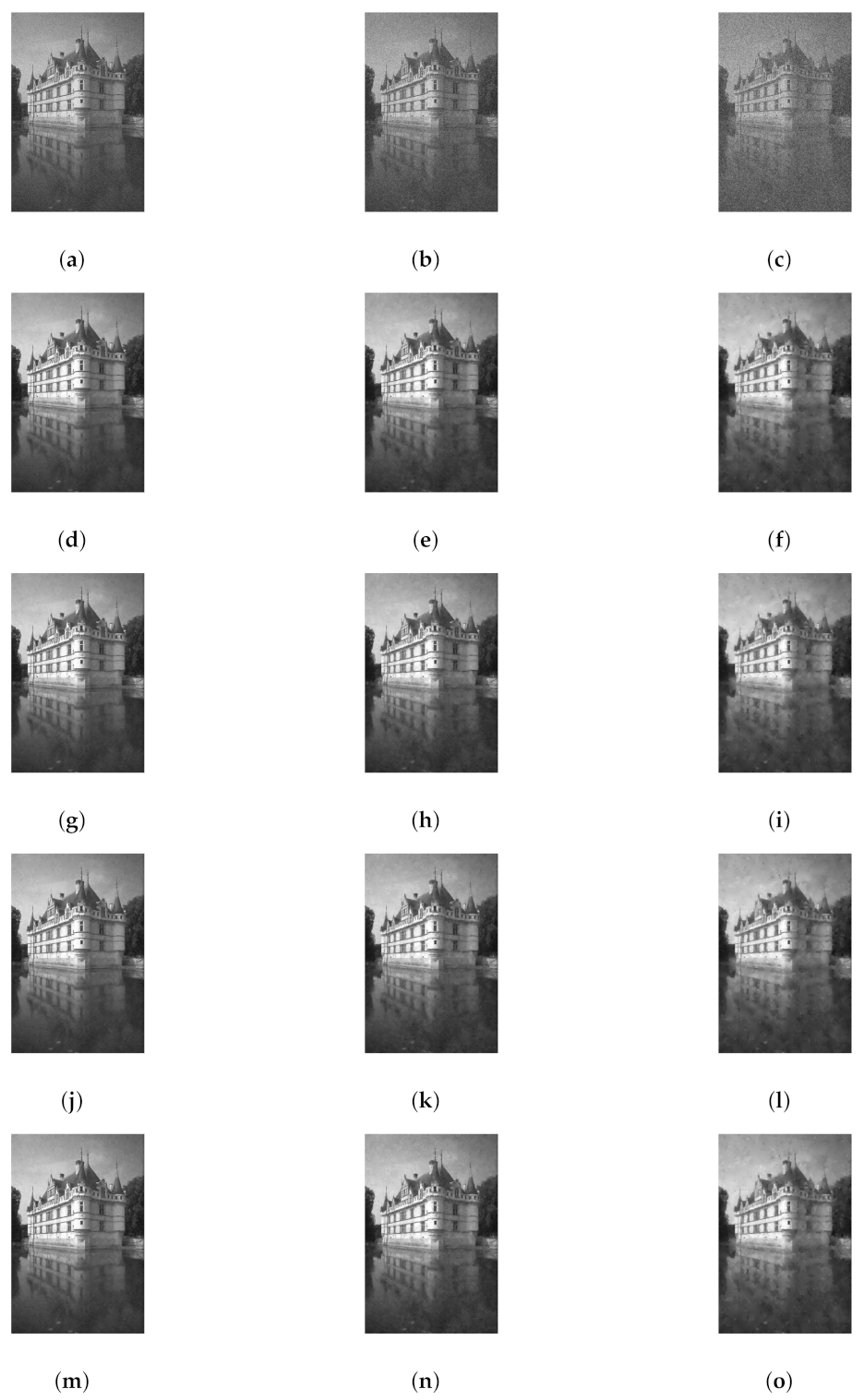
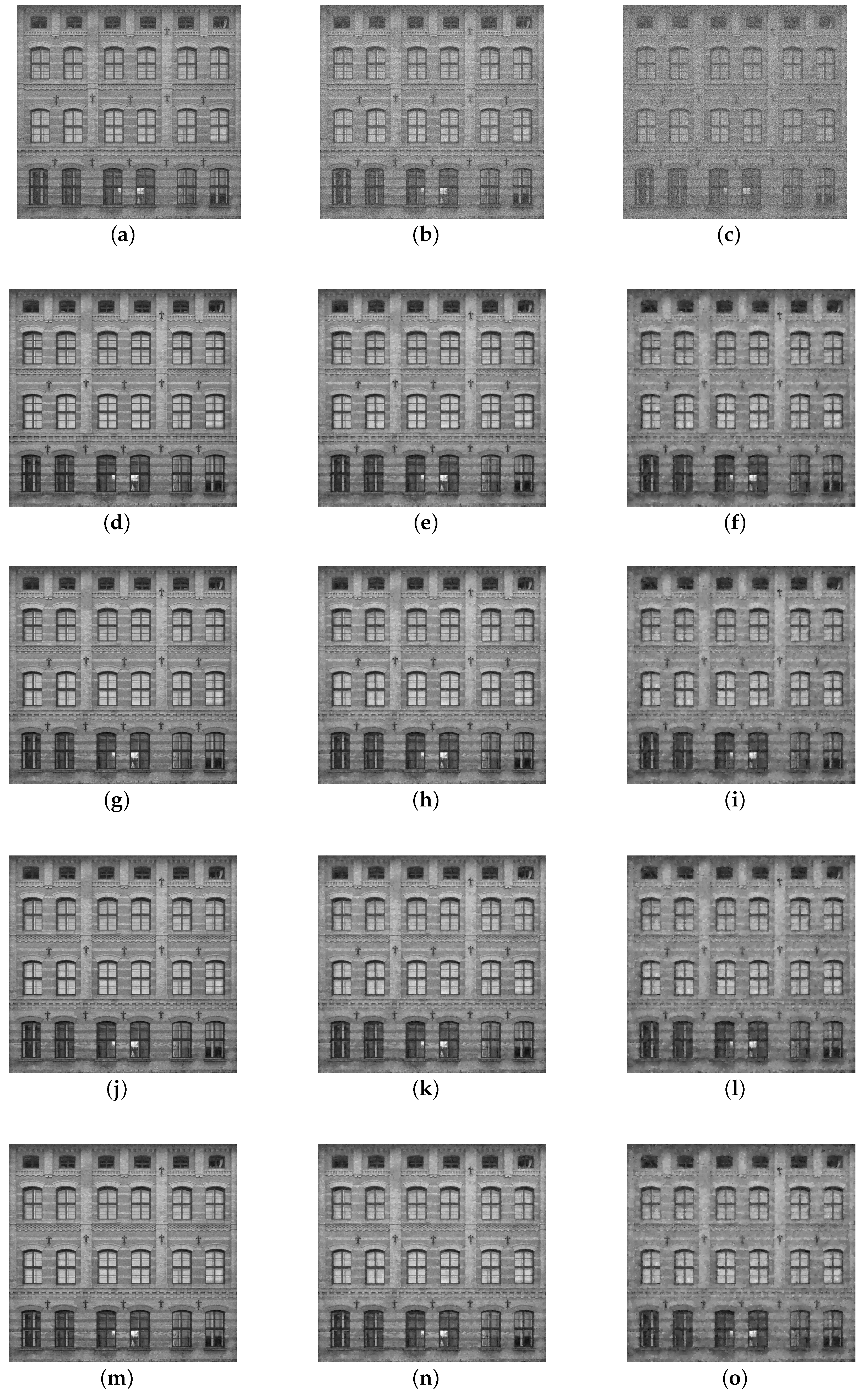
4. Numerical Experiments
4.1. Image Denoising Problems
4.2. Numerical Settings
4.3. Numerical Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Vũ, B.C. A splitting algorithm for dual monotone inclusions involving cocoercive operators. Adv. Comput. Math. 2013, 38, 667–681. [Google Scholar] [CrossRef]
- Pesquet, J.-C.; Repetti, A. A class of randomized primal-dual algorithms for distributed optimization. J. Nonlinear Convex Anal. 2015, 16, 2453–2490. [Google Scholar]
- Vũ, B.C. A spliting algorithm for coupled system of primal-dual monotone inclusions. J. Optim. Theory Appl. 2015, 164, 993–1025. [Google Scholar] [CrossRef]
- Boţ, R.I.; Hendrich, C. Solving monotone inclusions involving parallel sums of linearly composed maximally monotone operators. Inverse Probl. Imaging 2016, 10, 617–640. [Google Scholar] [CrossRef] [Green Version]
- Boţ, R.I.; Hendrich, C. A douglas-rachford type primal-dual method for solving inclusions with mixtures of composite and parallel-sum type monotone operators. SIAM J. Optim. 2013, 4, 2541–2565. [Google Scholar] [CrossRef] [Green Version]
- Boţ, R.I.; Csetnek, E.R.; Heinrich, A. A primal-dual splitting for finding zeros of sums of maximal monotone operators. SIAM J. Optim. 2013, 23, 2011–2036. [Google Scholar] [CrossRef]
- Yang, Y.X.; Tang, Y.C.; Wen, M.; Zeng, T.Y. Preconditioned douglas-rachford type primal-dual method for solving composite monotone inclusion problems with applications. Inverse Probl. Imaging 2021, 15, 787–825. [Google Scholar] [CrossRef]
- Briceño-Arias, L.M.; Combettes, P.L. A monotone+skew splitting splitting model for composite monotone inclusions in duality. SIAM J. Control Optim. 2011, 21, 1230–1250. [Google Scholar] [CrossRef] [Green Version]
- Combettes, P.L.; Pesquet, J.-C. Primal-dual splitting algorithm for solving inclusions with mixtures of composite, lipschitzian, and paralle-sum type monotone operators. Set-Valued Var. Anal. 2012, 20, 307–330. [Google Scholar] [CrossRef] [Green Version]
- Combettes, P.L. Systems of structured monotone inclusions: Duality, algorithms, and applications. SIAM J. Optim. 2013, 23, 2420–2447. [Google Scholar] [CrossRef] [Green Version]
- Becker, S.R.; Combettes, P.L. An algorithm for splitting parallel sums of linearly composed monotone operatos with applications to signal recovery. J. Nonlinear Convex Anal. 2014, 15, 137–159. [Google Scholar]
- Boţ, R.I.; Hendrich, C. Convergence analysis for a primal-dual monotone+skew splitting algorithm with applications to total variation minimization. J. Math. Imaging Vis. 2014, 49, 551–568. [Google Scholar]
- Alotaibi, A.; Combettes, P.L.; Shahzad, N. Solving coupled composite monotone inclusions by successive fejér approximations of their kukn-tucker set. SIAM J. Optim. 2014, 24, 2076–2095. [Google Scholar] [CrossRef] [Green Version]
- Tran-Dinh, Q.; Vu, B.C. A new splitting method for solving composite monotone inclusions involving parallel-sum operators. arXiv 2015, arXiv:1505.07946. [Google Scholar]
- Combettes, P.L.; Eckstein, J. Asynchronous block-iterative primal-dual decomposition methods for monotone inclusions. Math. Program. 2018, 168, 645–672. [Google Scholar] [CrossRef] [Green Version]
- Bardaro, C.; Bevignani, G.; Mantellini, I.; Seracini, M. Bivariate generalized exponential sampling series and applications to seismic waves. Constr. Math. Anal. 2019, 2, 153–167. [Google Scholar] [CrossRef]
- Johnstone, P.R.; Eckstein, J. Projective splitting with forward steps. Math. Program. 2020, 1–40. [Google Scholar] [CrossRef]
- Chambolle, A.; Lions, P.L. Image recovery via total variation minimizaing and related problems. Numer. Math. 1997, 76, 167–188. [Google Scholar] [CrossRef]
- Setzer, S.; Steidl, G.; Teuber, T. Infimal convolution regularization with discrete l1-type functionals. Commun. Math. Sci. 2011, 9, 797–827. [Google Scholar] [CrossRef] [Green Version]
- Combettes, P.L.; Vũ, B.C. Variable metric forward-backward splitting with applications to monotone inclusions in duality. Optimization 2014, 63, 1289–1318. [Google Scholar] [CrossRef] [Green Version]
- Tseng, P. A modified forward-backward splitting method for maximal monotone mappings. SIAM J. Control Optim. 2000, 38, 431–446. [Google Scholar] [CrossRef]
- Briceño-Arias, L.M.; Davis, D. Forward-backward-half forward algorithm for solving monotone inclusions. SIAM J. Optim. 2018, 28, 2839–2871. [Google Scholar] [CrossRef] [Green Version]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces, 2nd ed.; Springer: London, UK, 2017. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]




{kind=link}
{kind=link}
{kind=link}
| Image | Model | ||||||
|---|---|---|---|---|---|---|---|
| Castle | 7.7 | 21.2 | 14.7 | 29.7 | 35.5 | 123.9 | |
| 7.6 | 21.1 | 14.8 | 50.8 | 35.7 | 115.9 | ||
| Building | 6.1 | 25.3 | 12.4 | 33 | 31.3 | 87.8 | |
| 6.1 | 27.8 | 12.5 | 49.4 | 31.8 | 140 | ||
| Model | Method | Parameter |
|---|---|---|
| FB_BH | ||
| FBF_BH | ||
| FB | ||
| FBHF | ||
| FB_BH | ||
| FBF_BH | ||
| FB | ||
| FBHF |
| Method | Model | |||||||
|---|---|---|---|---|---|---|---|---|
| PSNR | SSIM | Iter | PSNR | SSIM | Iter | |||
| FBF_BH | 0.03 | 30.5138 | 0.8410 | 1791 | 30.5346 | 0.8409 | 6572 | |
| 0.05 | 30.5225 | 0.8410 | 1411 | 30.5356 | 0.8409 | 5203 | ||
| 0.07 | 30.5287 | 0.8410 | 1227 | 30.5361 | 0.8409 | 4445 | ||
| 0.09 | 30.5309 | 0.8410 | 1103 | 30.5370 | 0.8409 | 3994 | ||
| 0.11 | 30.5317 | 0.8410 | 1003 | 30.5379 | 0.8409 | 3730 | ||
| 0.13 | 30.5323 | 0.8410 | 946 | 30.5386 | 0.8409 | 3560 | ||
| 0.15 | 30.5330 | 0.8410 | 888 | 30.5391 | 0.8409 | 3372 | ||
| 0.03 | 30.5330 | 0.8384 | 2287 | 30.5434 | 0.8391 | 4984 | ||
| 0.07 | 30.5358 | 0.8386 | 1126 | 30.5451 | 0.8392 | 2824 | ||
| 0.11 | 30.5378 | 0.8387 | 796 | 30.5460 | 0.8393 | 2207 | ||
| 0.15 | 30.5390 | 0.8388 | 634 | 30.5365 | 0.8393 | 1896 | ||
| 0.19 | 30.5400 | 0.8388 | 538 | 30.5467 | 0.8393 | 1686 | ||
| 0.23 | 30.5409 | 0.8389 | 474 | 30.5468 | 0.8393 | 1518 | ||
| 0.26 | 30.5414 | 0.8389 | 439 | 30.5470 | 0.8393 | 1456 | ||
| FBHF | 0.03 | 30.5138 | 0.8410 | 1790 | 30.5346 | 0.8409 | 6474 | |
| 0.05 | 30.5225 | 0.8410 | 1411 | 30.5356 | 0.8409 | 5203 | ||
| 0.07 | 30.5287 | 0.8410 | 1227 | 30.5361 | 0.8409 | 4449 | ||
| 0.09 | 30.5309 | 0.8410 | 1103 | 30.5370 | 0.8409 | 3994 | ||
| 0.11 | 30.5317 | 0.8410 | 1003 | 30.5379 | 0.8409 | 3729 | ||
| 0.13 | 30.5323 | 0.8410 | 946 | 30.5386 | 0.8409 | 3561 | ||
| 0.15 | 30.5330 | 0.8410 | 887 | 30.5391 | 0.8409 | 3371 | ||
| 0.17 | 30.5336 | 0.8410 | 837 | 30.5393 | 0.8409 | 3169 | ||
| 0.03 | 30.5330 | 0.8384 | 2286 | 30.5434 | 0.8391 | 4983 | ||
| 0.07 | 30.5358 | 0.8386 | 1126 | 30.5452 | 0.8392 | 2824 | ||
| 0.11 | 30.5378 | 0.8387 | 796 | 30.5460 | 0.8393 | 2207 | ||
| 0.15 | 30.5390 | 0.8388 | 633 | 30.5465 | 0.8393 | 1896 | ||
| 0.19 | 30.5401 | 0.8388 | 538 | 30.5467 | 0.8393 | 1686 | ||
| 0.23 | 30.5410 | 0.8389 | 474 | 30.5468 | 0.8393 | 1519 | ||
| 0.27 | 30.5416 | 0.8389 | 428 | 30.5470 | 0.8393 | 1432 | ||
| 0.31 | 30.5421 | 0.8390 | 394 | 30.5471 | 0.8394 | 1346 | ||
| 0.32 | 30.5422 | 0.8390 | 387 | 30.5471 | 0.8394 | 1317 | ||
| Method | Model | Case | |||||||
|---|---|---|---|---|---|---|---|---|---|
| FB_BH | 1 | 0.3 | 0.15 | 0.3 | 0.15 | 0.3 | 0.3 | 1 | |
| 2 | 0.2 | 0.15 | 0.2 | 0.15 | 0.3 | 0.3 | 1 | ||
| 3 | 0.2 | 0.1 | 0.2 | 0.1 | 0.2 | 0.2 | 1 | ||
| 4 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | 0.3 | 1 | ||
| 1 | 0.3 | 0.15 | 0.3 | 0.15 | 0.3 | 0.3 | 1 | ||
| 2 | 0.4 | 0.2 | 0.3 | 0.1 | 0.2 | 0.3 | 1 | ||
| 3 | 0.1 | 0.2 | 0.1 | 0.2 | 0.3 | 0.2 | 1 | ||
| 4 | 0.1 | 0.1 | 0.1 | 0.1 | 0.2 | 0.4 | 1 | ||
| FB | 1 | 0.3 | 0.15 | 0.3 | 0.15 | 0.3 | 0.3 | 1.4 | |
| 2 | 0.2 | 0.1 | 0.3 | 0.2 | 0.3 | 0.4 | 1.5 | ||
| 3 | 0.3 | 0.2 | 0.3 | 0.1 | 0.2 | 0.2 | 1.8 | ||
| 4 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | 0.3 | 1.3 | ||
| 1 | 0.5 | 0.4 | 0.5 | 0.4 | 0.3 | 0.3 | 1.4 | ||
| 2 | 0.4 | 0.3 | 0.4 | 0.4 | 0.25 | 0.25 | 1.5 | ||
| 3 | 0.3 | 0.2 | 0.3 | 0.2 | 0.2 | 0.2 | 1.8 | ||
| 4 | 0.2 | 0.3 | 0.2 | 0.3 | 0.3 | 0.3 | 1.4 |
| Method | Model | Case | ||||||
|---|---|---|---|---|---|---|---|---|
| PSNR | SSIM | Iter | PSNR | SSIM | Iter | |||
| FB_BH | 1 | 30.5386 | 0.8411 | 753 | 30.5405 | 0.8409 | 2846 | |
| 2 | 30.5361 | 0.8411 | 824 | 30.5399 | 0.8409 | 3117 | ||
| 3 | 30.5379 | 0.8411 | 885 | 30.5397 | 0.8409 | 3277 | ||
| 4 | 30.5369 | 0.8409 | 818 | 30.5395 | 0.8408 | 3087 | ||
| 1 | 30.5386 | 0.8411 | 657 | 30.5411 | 0.8409 | 2481 | ||
| 2 | 30.5412 | 0.8389 | 534 | 30.5468 | 0.8393 | 1632 | ||
| 3 | 30.5253 | 0.8408 | 930 | 30.5364 | 0.8409 | 3603 | ||
| 4 | 30.5313 | 0.8410 | 1034 | 30.5375 | 0.8309 | 3875 | ||
| FB | 1 | 30.5387 | 0.8411 | 701 | 30.5408 | 0.8409 | 2640 | |
| 2 | 30.5382 | 0.8412 | 754 | 30.5419 | 0.8410 | 2514 | ||
| 3 | 30.5389 | 0.8409 | 601 | 30.5407 | 0.8409 | 2242 | ||
| 4 | 30.5377 | 0.8409 | 735 | 30.5398 | 0.8408 | 2725 | ||
| 1 | 30.5442 | 0.8391 | 292 | 30.5475 | 0.8394 | 1047 | ||
| 2 | 30.5435 | 0.8391 | 321 | 30.5474 | 0.8394 | 1140 | ||
| 3 | 30.5447 | 0.8392 | 285 | 30.5476 | 0.8394 | 980 | ||
| 4 | 30.5435 | 0.8391 | 372 | 30.5474 | 0.8394 | 1121 | ||
| Image | Model | FBF_BH | FBHF | |||||
| PSNR | SSIM | Iter | PSNR | SSIM | Iter | |||
| Castle | 15 | 30.5330 | 0.8410 | 888 | 30.5336 | 0.8410 | 837 | |
| 25 | 27.9370 | 0.7799 | 786 | 27.9376 | 0.7798 | 736 | ||
| 50 | 24.9407 | 0.7027 | 1364 | 24.9427 | 0.7026 | 1315 | ||
| 15 | 30.5414 | 0.8389 | 439 | 30.5422 | 0.8390 | 387 | ||
| 25 | 27.9352 | 0.7796 | 665 | 27.9379 | 0.7798 | 615 | ||
| 50 | 24.9332 | 0.7010 | 1169 | 24.9380 | 0.7014 | 1093 | ||
| Building | 15 | 28.3617 | 0.8404 | 1365 | 28.3612 | 0.8404 | 1339 | |
| 25 | 25.5939 | 0.7333 | 1020 | 25.5943 | 0.7333 | 971 | ||
| 50 | 22.6506 | 0.5558 | 1100 | 22.6510 | 0.5558 | 1045 | ||
| 15 | 28.3663 | 0.8405 | 492 | 28.3665 | 0.8405 | 431 | ||
| 25 | 25.5997 | 0.7332 | 623 | 25.6001 | 0.7332 | 570 | ||
| 50 | 22.6716 | 0.5565 | 1146 | 22.6724 | 0.5565 | 1070 | ||
| Image | Model | FB_BH | FB | |||||
| PSNR | SSIM | Iter | PSNR | SSIM | Iter | |||
| Castle | 15 | 30.5386 | 0.8411 | 753 | 30.5389 | 0.8409 | 601 | |
| 25 | 27.9398 | 0.7799 | 691 | 27.9452 | 0.7797 | 548 | ||
| 50 | 24.9415 | 0.7027 | 1321 | 24.9485 | 0.7013 | 1039 | ||
| 15 | 30.5412 | 0.8389 | 534 | 30.5426 | 0.8391 | 398 | ||
| 25 | 27.9330 | 0.7795 | 734 | 27.9400 | 0.7799 | 601 | ||
| 50 | 24.9278 | 0.7707 | 1243 | 24.9418 | 0.7017 | 1085 | ||
| Building | 15 | 28.3635 | 0.8405 | 1047 | 28.3634 | 0.8404 | 906 | |
| 25 | 25.5952 | 0.7333 | 832 | 25.5956 | 0.7334 | 719 | ||
| 50 | 22.6051 | 0.5563 | 1018 | 22.6521 | 0.5564 | 849 | ||
| 15 | 28.3664 | 0.8405 | 623 | 28.3668 | 0.8405 | 420 | ||
| 25 | 25.5822 | 0.7329 | 584 | 25.6005 | 0.7322 | 554 | ||
| 50 | 22.6629 | 0.5577 | 1043 | 22.6653 | 0.5578 | 856 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Luo, X.; Tang, Y.; Dong, Q. Primal-Dual Splitting Algorithms for Solving Structured Monotone Inclusion with Applications. Symmetry 2021, 13, 2415. https://doi.org/10.3390/sym13122415
Chen J, Luo X, Tang Y, Dong Q. Primal-Dual Splitting Algorithms for Solving Structured Monotone Inclusion with Applications. Symmetry. 2021; 13(12):2415. https://doi.org/10.3390/sym13122415
Chicago/Turabian StyleChen, Jinjian, Xingyu Luo, Yuchao Tang, and Qiaoli Dong. 2021. "Primal-Dual Splitting Algorithms for Solving Structured Monotone Inclusion with Applications" Symmetry 13, no. 12: 2415. https://doi.org/10.3390/sym13122415