Generation of Julia and Mandelbrot Sets via Fixed Points



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Main Results
2.1. Escape Criterion for Quadratic Complex Polynomials in a Picard Ishikawa Type Orbit
2.2. Escape Criterion for Cubic Complex Polynomials in a Picard Ishikawa Type Orbit
2.3. Escape Criterion for General Complex Polynomials in a Picard Ishikawa Type Orbit
3. Visualization of Fractals
3.1. Generation of Julia sets
| Algorithm 1: Generation of Julia Set. |
 |
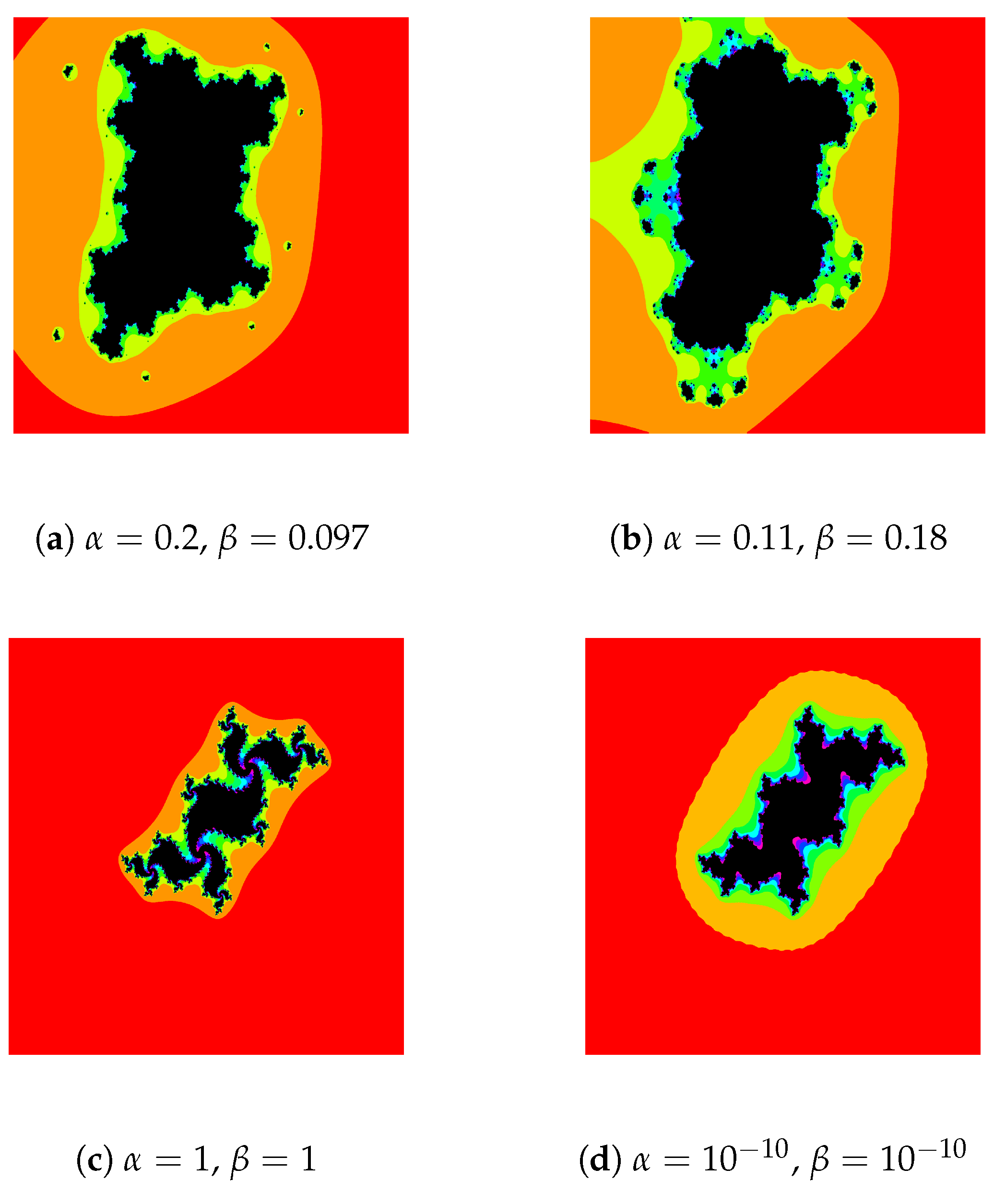
- For Figure 1, we consider the polynomial and . It is easy to see that T has one attracting fixed point, . Observe that for , and , we obtain different images due to color variation caused by parameters. It is interesting to note that for , and , we have similar shapes but there is clear variation of colors.
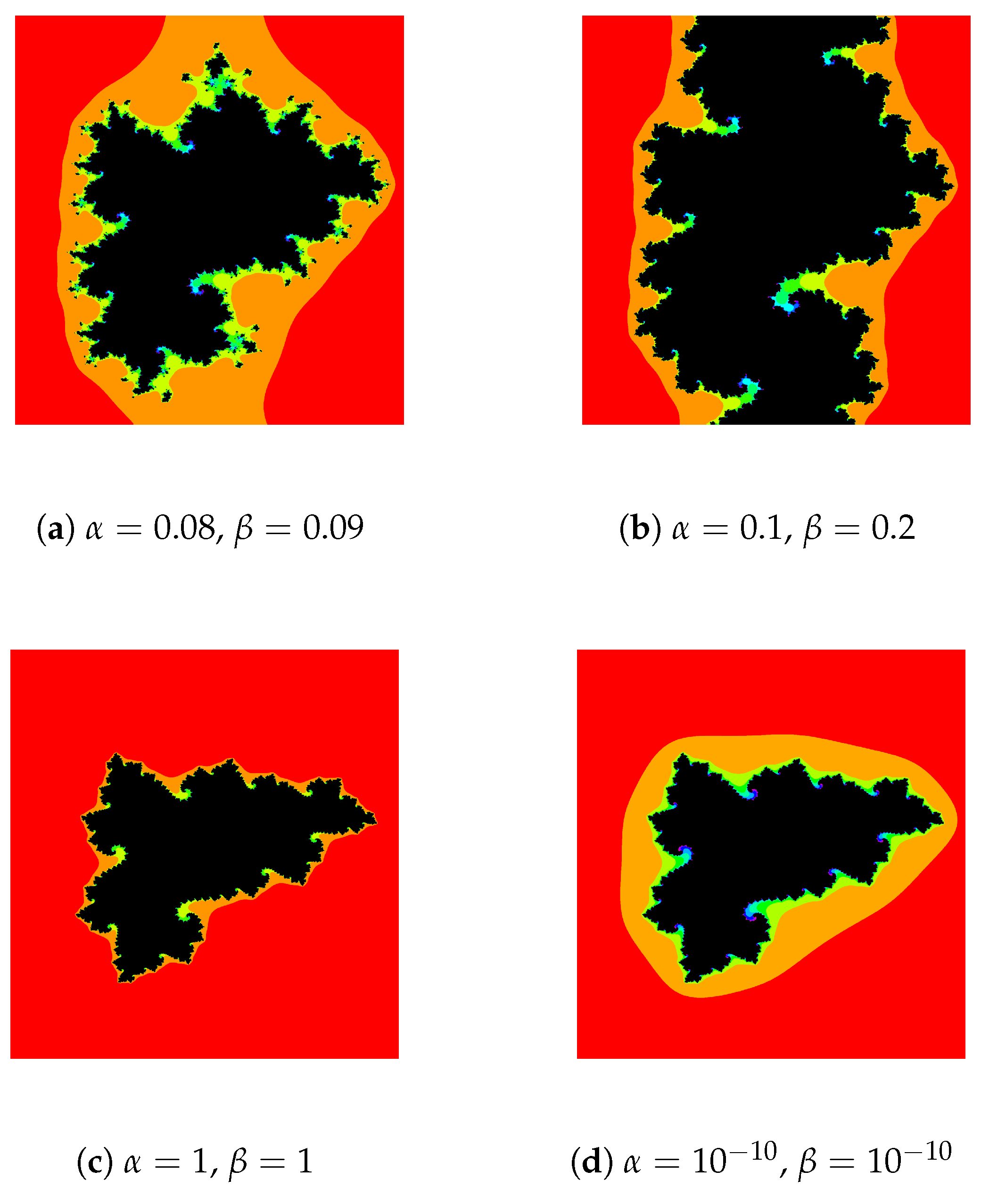
- For Figure 2, we consider the polynomial and . The polynomial T has attracting fixed point in A. Note that the cubic Julia sets for and have more color variation as compared to the Julia sets for , and . Again, for , and , the shapes are same but there is variability in colors.
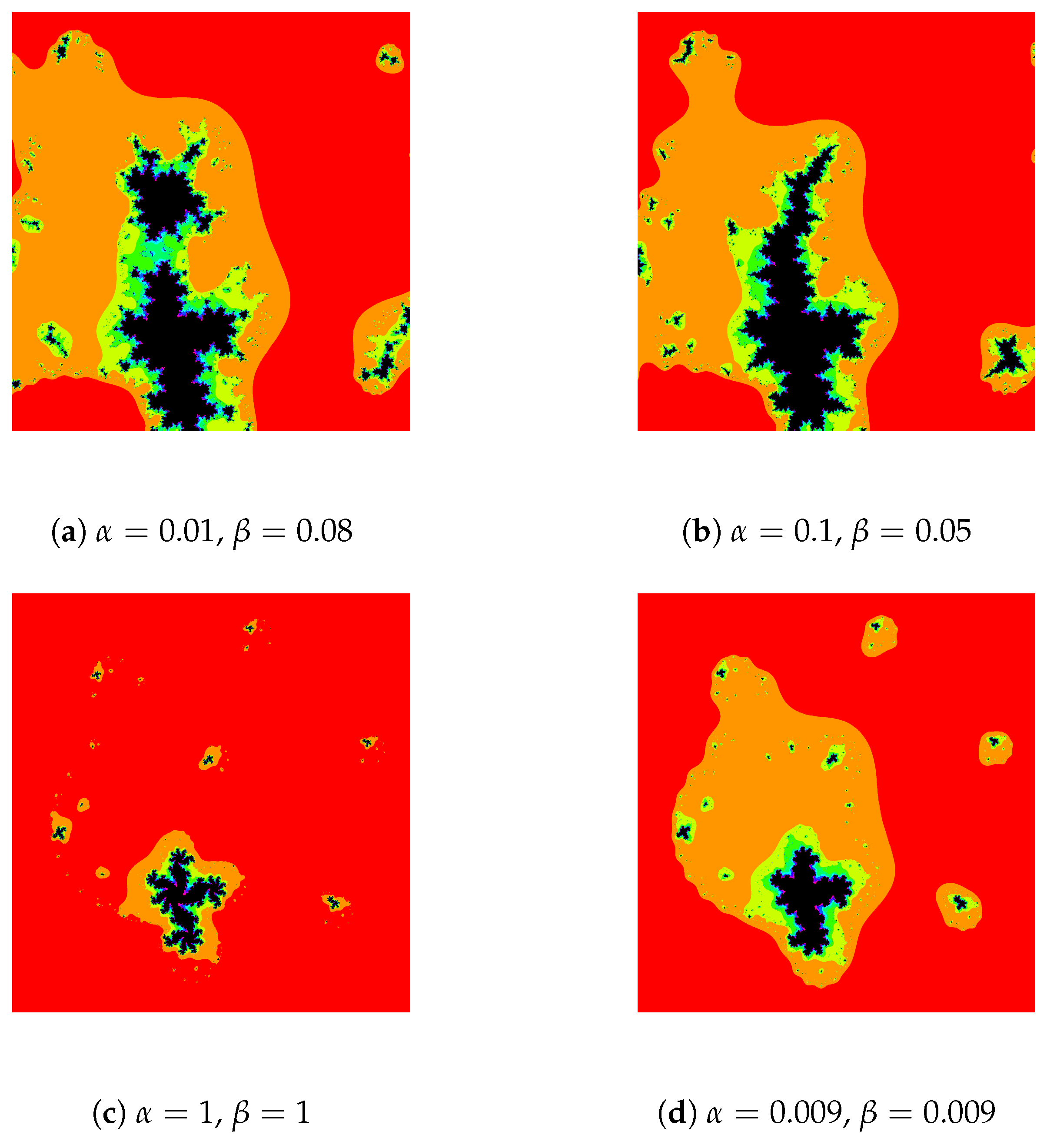
- For Figure 3, we input and . The attracting fixed point of the polynomial is . We can see that for and the shape is spread and stretched while the shape is dense and neatly packed for and . Note the variation of colors in figures (C) and (D) as well.
3.2. Generation of Mandelbrot Sets
| Algorithm 2: Generation of Mandelbrot set. |
 |
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Barnsley, M. Fractals Everywhere, 2nd ed.; Academic Press: San Diego, CA, USA, 1993. [Google Scholar]
- Hundertmark-Zauôkovù, A. On the convergence of fixed point iterations for the moving geometry in a fluid-structure interaction problem. J. Differ. Equ. 2019, 267, 7002–7046. [Google Scholar] [CrossRef]
- Rahmani, M.; Koutsopoulos, H.N.; Jenelius, E. Travel time estimation from sparse floating car data with consistent path inference: A fixed point approach. Transp. Res. Part C Emerg. Technol. 2017, 85, 628–643. [Google Scholar] [CrossRef]
- Strogatz, S.H. Nonlinear Dynamics and Chaos With Applications to Physics, Biology, Chemistry, and Engineering, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Julia, G. Memoire sur l’iteration des functions rationnelles. J. Math. Pures Appl. 1918, 8, 737–747. [Google Scholar]
- Devaney, R.L. A First Course in Chaotic Dynamical Systems: Theory and Experiment, 2nd ed.; Addison-Wesley: Boston, MA, USA, 1992. [Google Scholar]
- Falconer, K. Fractal Geometry: Mathematical Foundations and Applications, 2nd ed.; John Wiley & Sons: Chichester, UK, 2004. [Google Scholar]
- Frame, M.; Robertson, J. A generalized Mandelbrot set and the role of critical points. Comput. Graph. 1992, 16, 35–40. [Google Scholar] [CrossRef]
- Brouwer, L.E.J. Über Abbildungen von Mannigfaltigkeiten. Math. Ann. 1912, 71, 97–115. [Google Scholar] [CrossRef] [Green Version]
- Mandelbrot, B.B. The Fractal Geometry of Nature; W.H. Freeman: New York, NY, USA, 1983; Volume 2. [Google Scholar]
- Debnath, L. A brief historical introduction to fractals and fractal geometry. Int. J. Math. Educ. Sci. Technol. 2006, 37, 29–50. [Google Scholar] [CrossRef]
- Lakhtakia, A.; Varadan, W.; Messier, R.; Varadan, V.K. On the symmetries of the Julia sets for the process zp + c. J. Phys. A Math. Gen. 1987, 20, 3533–3535. [Google Scholar] [CrossRef]
- Negi, A.; Rani, M. Midgets of superior Mandelbrot set. Chaos Solitons Fract. 2008, 36, 237–245. [Google Scholar] [CrossRef]
- Negi, A.; Rani, M. A new approach to dynamic noise on superior Mandelbrot set. Chaos Solitons Fract. 2008, 36, 1089–1096. [Google Scholar] [CrossRef]
- Rochon, D. A generalized Mandelbrot set for bicomplex numbers. Fractals 2000, 8, 355–368. [Google Scholar] [CrossRef]
- Wang, X.; Sun, Y. The general quaternionic M-J sets on the mapping z ← zα + c(α ∈ ℕ). Comput. Math. Appl. 2007, 53, 1718–1732. [Google Scholar] [CrossRef] [Green Version]
- Rani, M. Theoretical Framework for Fractal Models under Two-Step Feedback Process. Ph.D. Thesis, Kumaun University, Nainital, India, 2016. [Google Scholar]
- Rani, M.; Kumar, V. Superior Julia set. Res. Math. Educ. 2004, 8, 261–277. [Google Scholar]
- Rani, M.; Kumar, V. Superior Mandelbrot set. Res. Math. Educ. 2004, 8, 279–291. [Google Scholar]
- Rani, M.; Chauhan, Y.S.; Negi, A. Non linear dynamics of Ishikawa iteration. Int. J. Comput. Appl. 2010, 7, 43–49. [Google Scholar] [CrossRef]
- Chauhan, Y.S.; Rana, R.; Negi, A. New Julia sets of Ishikawa iterates. Int. J. Comput. Appl. 2010, 7, 34–42. [Google Scholar] [CrossRef]
- Chauhan, Y.S.; Rana, R.; Negi, A. Complex dynamics of Ishikawa iterates for non integer values. Int. J. Comput. Appl. 2010, 9, 9–16. [Google Scholar] [CrossRef]
- Ashish; Rani, M.; Chugh, R. Julia sets and Mandelbrot sets in Noor orbit. Appl. Math. Comput. 2014, 228, 615–631. [Google Scholar]
- Kang, S.M.; Rafiq, A.; Latif, A.; Shahid, A.A.; Ali, F. Fractals through modified iteration scheme. Filomat 2016, 30, 3033–3046. [Google Scholar] [CrossRef] [Green Version]
- Kang, S.M.; Rafiq, A.; Latif, A.; Shahid, A.A.; Kwun, Y.C. Tricorns and multicorns of S-iteration scheme. J. Funct. Spaces 2015, 2015, 417167. [Google Scholar]
- Kumari, M.; Ashish, R.C. New Julia and Mandelbrot sets for a new faster iterative process. Int. J. Pure Appl. Math. 2016, 107, 161–177. [Google Scholar] [CrossRef] [Green Version]
- Kang, S.M.; Nazeer, W.; Tanveer, M.; Shahid, A.A. New fixed point results for fractal generation in Jungck Noor orbit with s-convexity. J. Funct. Spaces 2015, 2015, 963016. [Google Scholar] [CrossRef] [Green Version]
- Kang, S.M.; Rafiq, A.; Tanveer, M.; Ali, F.; Kwun, Y.C. Julia and Mandelbrot sets in modified Jungck three-step orbit. Wulfenia J. 2015, 22, 167–185. [Google Scholar]
- Kwun, Y.C.; Tanveer, M.; Nazeer, W.; Abbas, M.; Kang, S.M. Fractal generation in modified Jungck-S orbit. IEEE Access 2019, 7, 35060–35071. [Google Scholar] [CrossRef]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing: Principles, Algorithms and Applications, 4th ed.; Pearson: Bengaluru, India, 2007. [Google Scholar]
- Mishra, M.K.; Ojha, D.B.; Sharma, D. Fixed point results in tricorn and multicorns of Ishikawa iteration and s-convexity. IJEST 2011, 2, 157–160. [Google Scholar]
- Cho, S.Y.; Shahid, A.A.; Nazeer, W.; Kang, S.M. Fixed point results for fractal generation in noor orbit and s-convexity. SpringerPlus 2016, 5, 1843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nazeer, W.; Kang, S.M.; Tanveer, M.; Shahid, A.A. Fixed point results in the generation of Julia and Mandelbrot sets. J. Inequal. Appl. 2015, 2015, 298. [Google Scholar] [CrossRef] [Green Version]
- Piri, H.; Daraby, B.; Rahrovi, S.; Ghasemi, M. Approximating fixed points of generalized α-nonexpansive mappings Banach spaces by new faster iteration process. Numer. Algorithms 2018, 81, 1129–1148. [Google Scholar] [CrossRef]




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbas, M.; Iqbal, H.; De la Sen, M. Generation of Julia and Mandelbrot Sets via Fixed Points. Symmetry 2020, 12, 86. https://doi.org/10.3390/sym12010086
Abbas M, Iqbal H, De la Sen M. Generation of Julia and Mandelbrot Sets via Fixed Points. Symmetry. 2020; 12(1):86. https://doi.org/10.3390/sym12010086
Chicago/Turabian StyleAbbas, Mujahid, Hira Iqbal, and Manuel De la Sen. 2020. "Generation of Julia and Mandelbrot Sets via Fixed Points" Symmetry 12, no. 1: 86. https://doi.org/10.3390/sym12010086