Hermite-Type Collocation Methods to Solve Volterra Integral Equations with Highly Oscillatory Bessel Kernels


Abstract
:1. Introduction
2. Hermite-Type Collocation Methods
2.1. Direct Hermite Collocation Method (Algorithm 1)
| Algorithm 1: direct Hermite collocation method. |
| 1. Compute by (18); 2. Compute by (14)–(17); 3. Compute and by (13). |
2.2. Piecewise Hermite Collocation Method
| Algorithm 2: piecewise Hermite collocation method. |
| 1. Compute by (18); 2. Compute by (24); 3. Compute and by (22). |
3. Error Analyses
- is integrable;
- and are bounded in for fixed respectively,
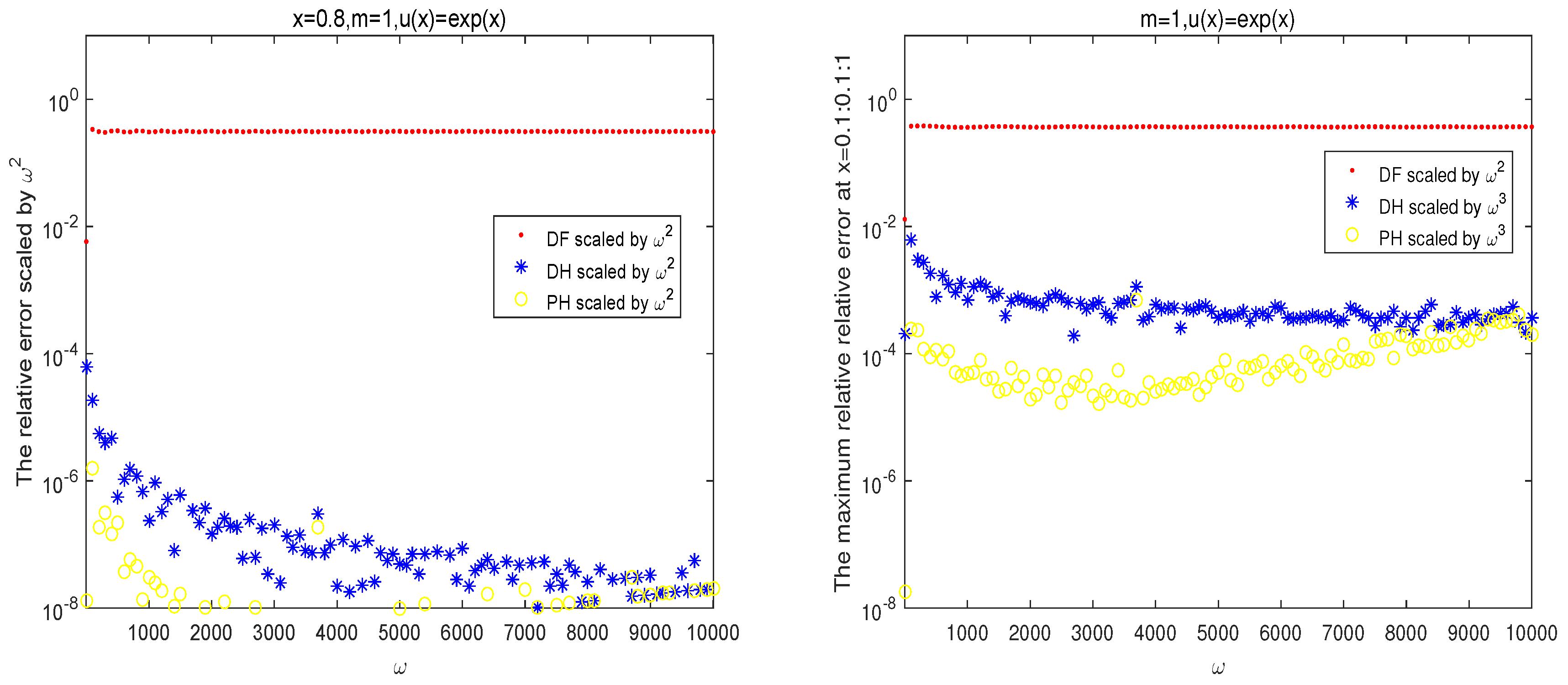
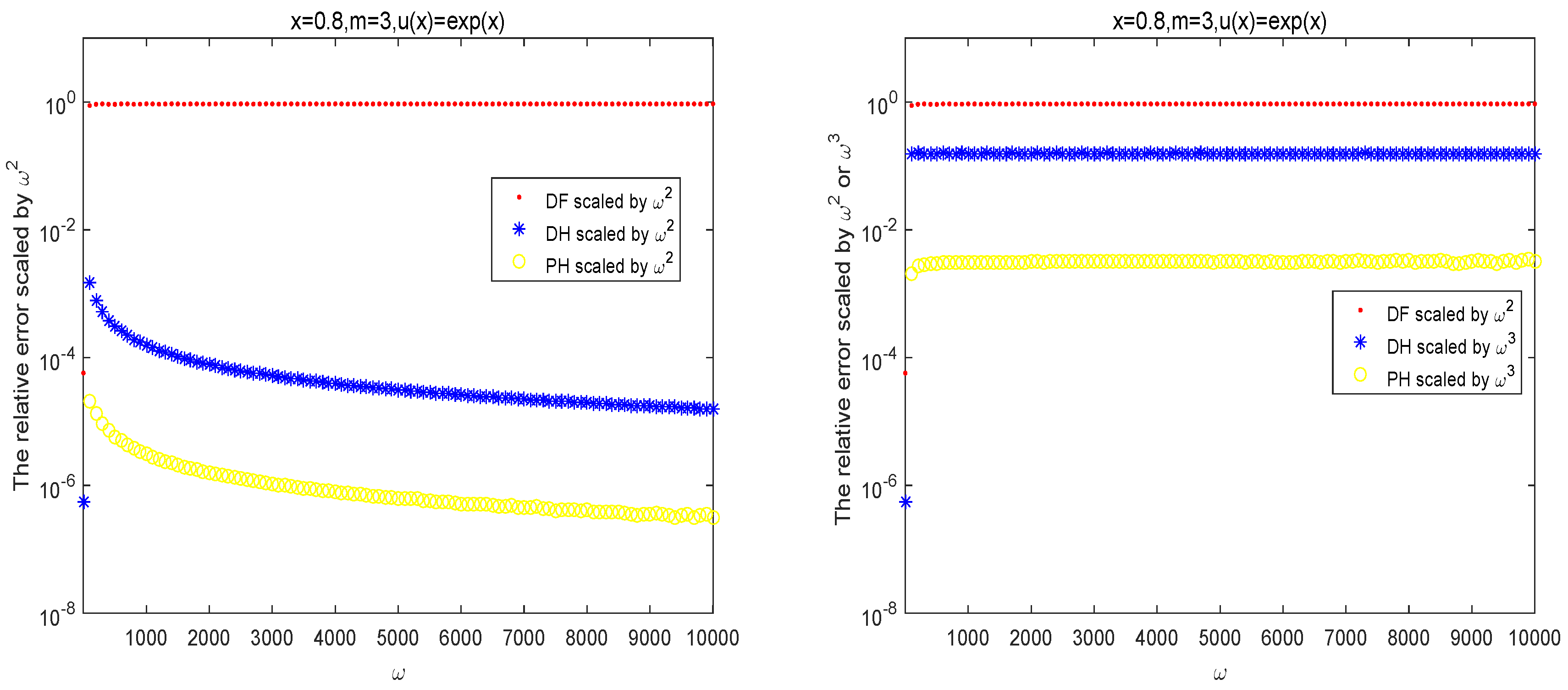
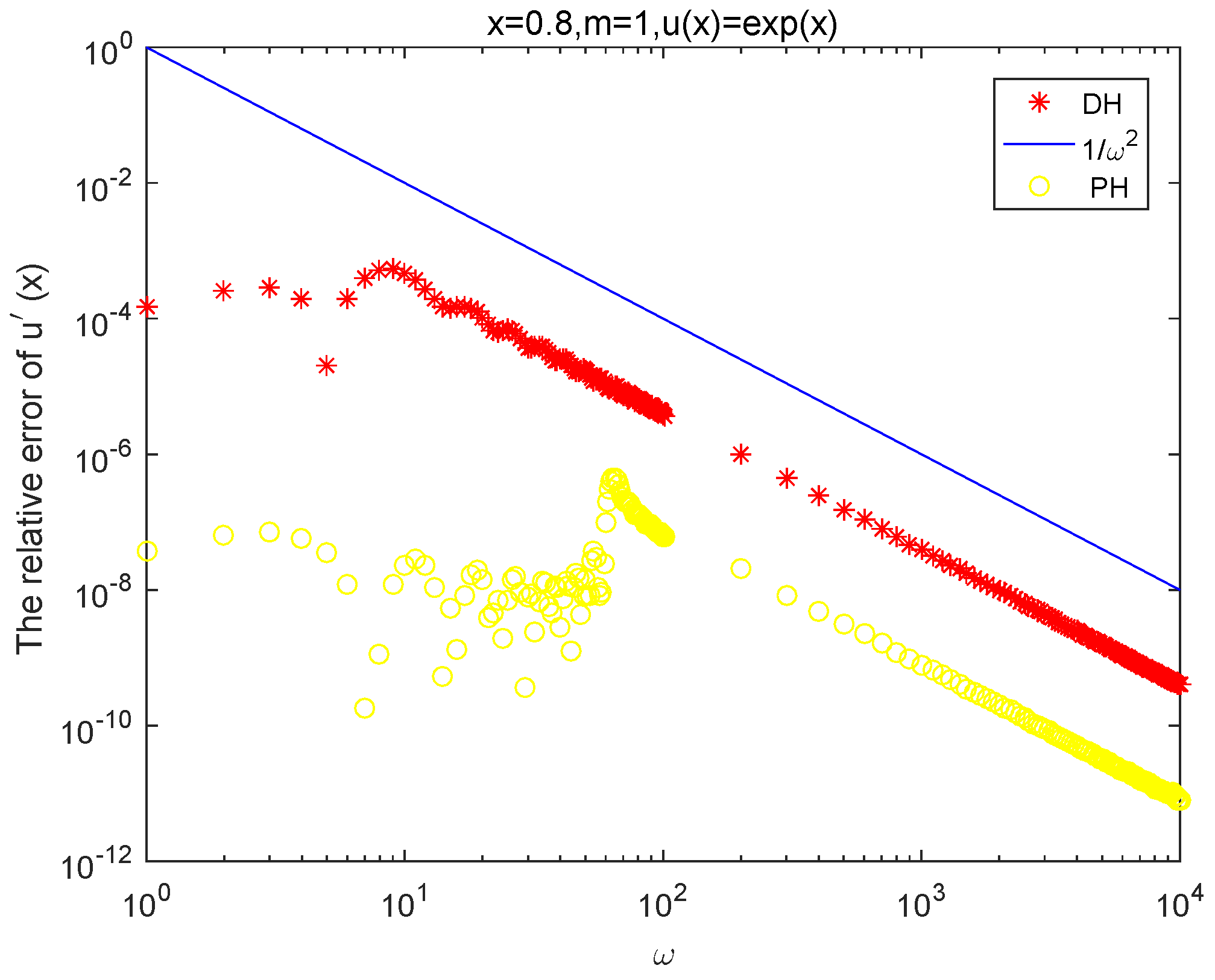
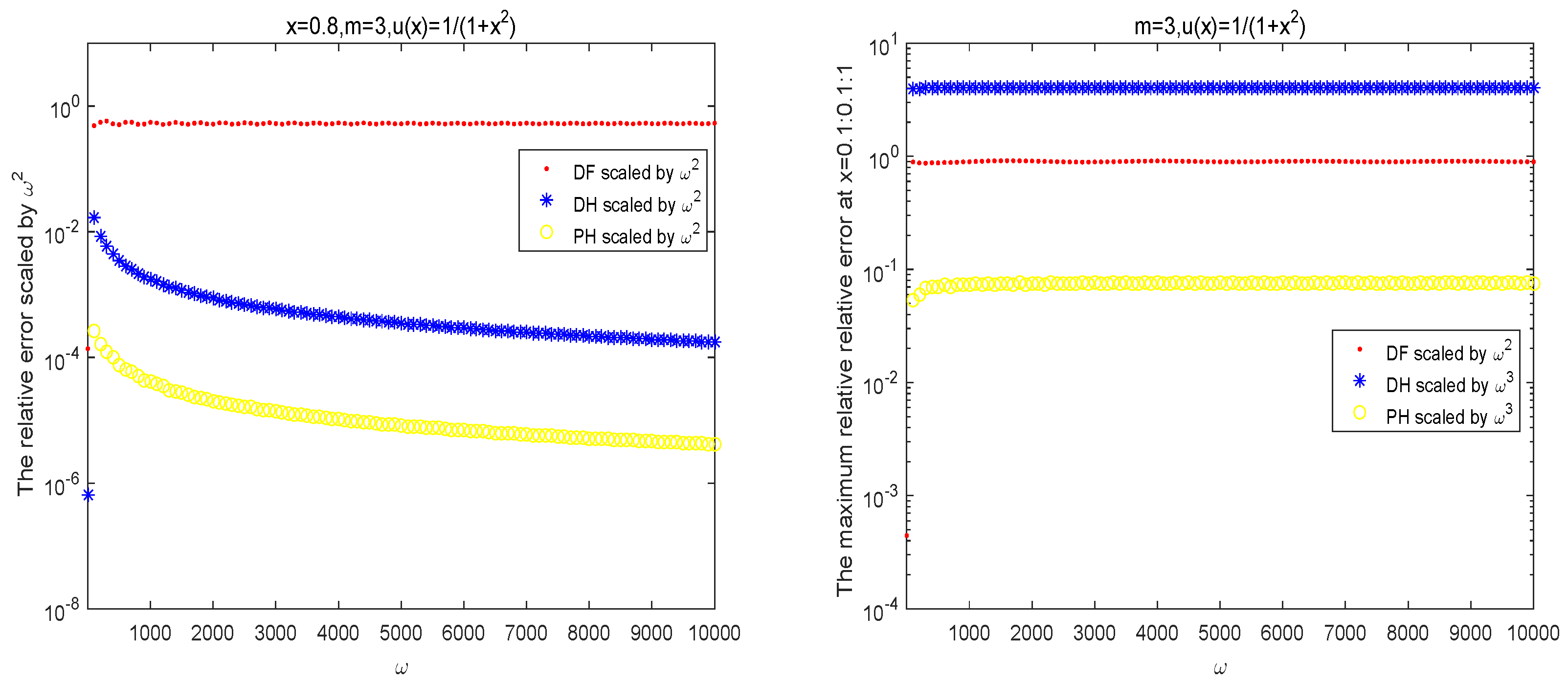
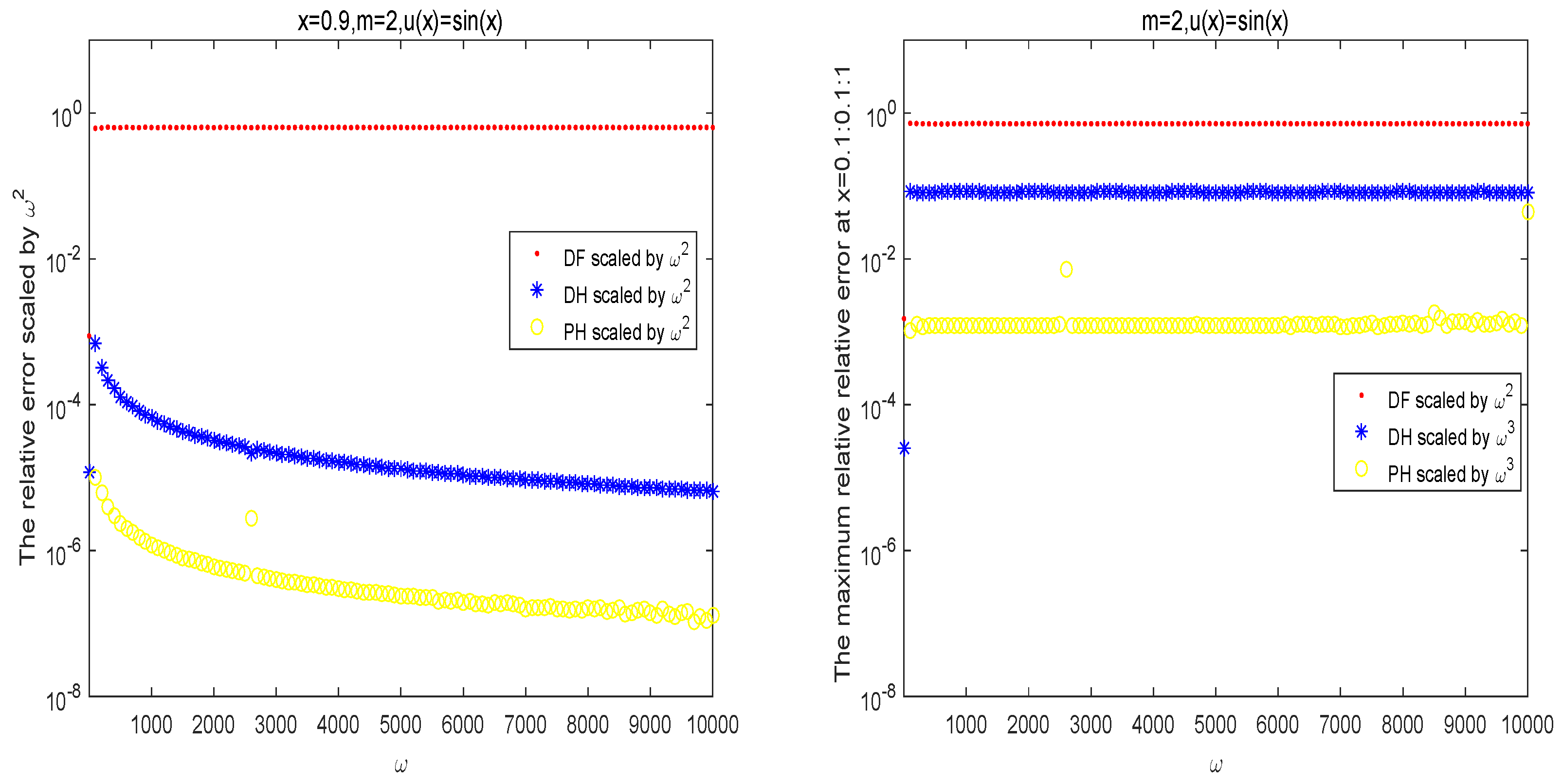
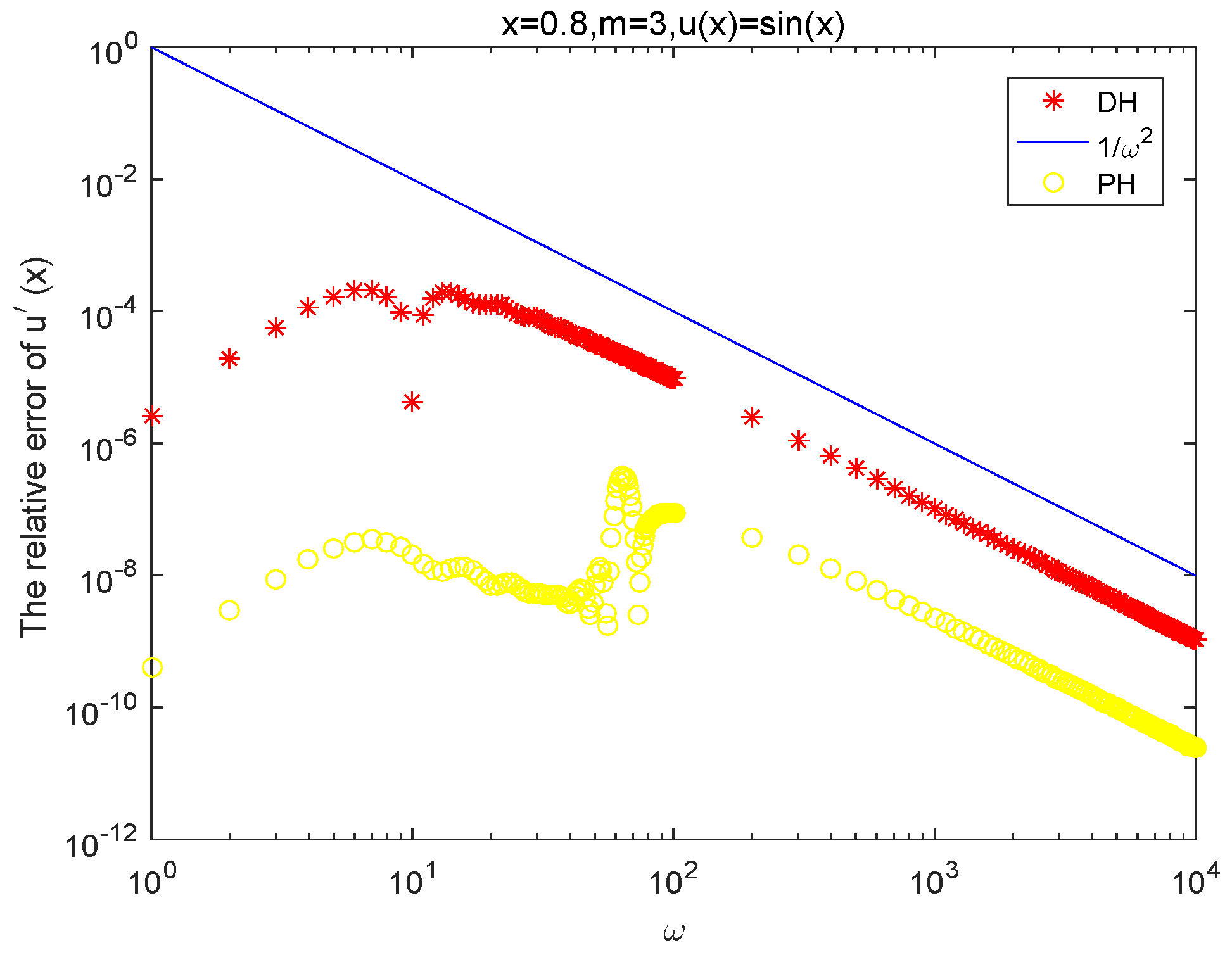
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bao, G.; Sun, W.W. A fast algorithm for the electromagnetic scattering from a large cavity. SIAM J. Sci. Comput. 2005, 27, 553–574. [Google Scholar] [CrossRef]
- Davis, P.J.; Duncan, D.B. Stability and convergence of collocation schemes for retarded potential integral equations. SIAM J. Numer. Anal. 2004, 42, 1167–1188. [Google Scholar] [CrossRef]
- Langdon, S.; Chandler-Wilde, S.N. A wavenumber independent boundary element method for an acoustic scattering problem. SIAM J. Numer. Anal. 2006, 43, 2450–2477. [Google Scholar] [CrossRef]
- Brunner, H. Collocation Methods for Volterra Integral and Related Functional Equations; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Brunner, H.; Davis, P.J.; Duncan, D.B. Discontinuous Galerkin approximations for Volterra integral equations of the first kind. IMA J. Numer. Anal. 2009, 29, 856–881. [Google Scholar] [CrossRef]
- Ma, J.; Fang, C.; Xiang, S. Modified asymptotic orders of the direct Filon method for a class of Volterra integral equations. J. Comput. Appl. Math. 2015, 281, 120–125. [Google Scholar] [CrossRef]
- Wang, H.; Xiang, S. Asymptotic expansion and Filon-type methods for a Volterra integral equation with a highly oscillatory kernel. IMA J. Numer. Anal. 2011, 31, 469–490. [Google Scholar] [CrossRef]
- Brunner, H. On Volterra integral operators with highly oscillatory kernels. Discret. Contin. Dyn. Syst. 2014, 34, 915–929. [Google Scholar] [CrossRef]
- Ma, J.; Liu, H. On the Convolution Quadrature Rule for Integral Transforms with Oscillatory Bessel Kernels. Symmetry 2018, 10, 239. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, C. Boundary value methods for Volterra integral and integro-differential equations. Appl. Math. Comp. 2011, 218, 2619–2630. [Google Scholar] [CrossRef]
- Ma, J.; Xiang, S. A Collocation Boundary Value Method for Linear Volterra Integral Equations. J. Sci. Comput. 2017, 71, 1–20. [Google Scholar] [CrossRef]
- Xiang, S.; Wu, Q. Numerical solutions to Volterra integral equations of the second kind with oscillatory trigonometric kernels. Appl. Math. Comp. 2013, 223, 34–44. [Google Scholar] [CrossRef]
- Wu, Q. On graded meshes for weakly singular Volterra integral equations with oscillatory trigonometric kernels. J. Comput. Appl. Math. 2014, 263, 370–376. [Google Scholar] [CrossRef]
- Xiang, S.; Brunner, H. Efficient methods for Volterra integral equations with highly oscillatory Bessel kernels. BIT Numer. Math. 2013, 53, 241–263. [Google Scholar] [CrossRef]
- Fang, C.; Ma, J.; Xiang, M. On Filon methods for a class of Volterra integral equations with highly oscillatory Bessel kernels. Appl. Math. Comp. 2015, 268, 783–792. [Google Scholar] [CrossRef]
- Watson, G.N. A Treatise on the Theory of Bessel Functions; Cambridge University Press: Cambridge, UK, 1952. [Google Scholar]
- Xiang, S.; Wang, H. Fast integration of highly oscillatory integrals with exotic oscillators. Math. Comp. 2010, 79, 829–844. [Google Scholar] [CrossRef]
- Ma, J.; Xiang, S.; Kang, H. on the convergence rates of Filon methods for the solution of a Volterra integral equation with a highly oscillatory Bessel kernel. Appl. Math. Lett. 2013, 26, 699–705. [Google Scholar] [CrossRef]
Sample Availability: Samples of the compounds …… are available from the authors. |









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 10 | ||||
| 100 | ||||
| 1000 | ||||
| 10 | ||||
| 100 | ||||
| 1000 | ||||
| 0 |
| 10 | ||||
| 100 | ||||
| 1000 | ||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, C.; He, G.; Xiang, S. Hermite-Type Collocation Methods to Solve Volterra Integral Equations with Highly Oscillatory Bessel Kernels. Symmetry 2019, 11, 168. https://doi.org/10.3390/sym11020168
Fang C, He G, Xiang S. Hermite-Type Collocation Methods to Solve Volterra Integral Equations with Highly Oscillatory Bessel Kernels. Symmetry. 2019; 11(2):168. https://doi.org/10.3390/sym11020168
Chicago/Turabian StyleFang, Chunhua, Guo He, and Shuhuang Xiang. 2019. "Hermite-Type Collocation Methods to Solve Volterra Integral Equations with Highly Oscillatory Bessel Kernels" Symmetry 11, no. 2: 168. https://doi.org/10.3390/sym11020168