4.1. Parametric Description of the Transition Curve
The transition curve is the transition section between the straight track and the circular track, usually in the form of gyration curve or sinusoidal curve. The main parameters which describe the transition curve are the curvature and transverse slope angle . In addition, the total length of the transition curve , the maximum transverse slope angle and the minimum radius of the transition curve are the boundary conditions of the transition curve.
The curvature and transverse slope angle of the gyration curve are linear functions of the track mileage s. The acceleration of the gyration curve is discontinuous. The vehicle has lateral impact at the end of the curve, which is suitable for the low-speed section.
The equation describing the transition curve is as follows:
The curvature and transverse slope angle are defined, and the space equation of the center line of the transition curve can be given
where
is the direction angle of the transition curve, and
is at the orbital mileage
s and the plane coordinate in the reference coordinate system whose coordinate origin is the starting point of the center line of the transition curve.
According to Equation (
18), the algebraic equation of transition curve is obtained as follows:
Taking the first three approximations, the cubic parabolic approximation equation of the cycloid is obtained as follows:
The rail surface formed by the transition curve is complex, and the center line is a kind of plane curve. In order to accurately describe the spatial posture of the transition curve, the coordinate system is defined as follows:The reference coordinate system O is located at the starting point of the center line of the transition curve. A moving coordinate system is set up on the track center line, which can move along the track center line. The other is the track reference coordinate system , which corresponds to the vehicle’s central coordinate system and has a relatively fixed position. The orbital mileage of their origins is respectively and .
In order to get the posture matrix of the orbital coordinate system
, the posture matrix of
relative to
is calculated firstly. The auxiliary coordinate systems
and
respectively corresponding to
and
are established. The origin of
is located on the
y-negative half axis of the
, and the projection distance from the origin of
is equal to the curvature radius
at
. The
x-axis of
is parallel to the
x-axis of
, and the
z-axis is parallel to the
z-axis of
. In addition, the angle between the
y-axis of
and the
y-axis is the transverse slope angle
. The definition of the coordinate system
is similar to that of
. The coordinate systems are shown in
Figure 4.
When the mileage
is known, the coordinates of the origin of
can be obtained from Equation (
20):
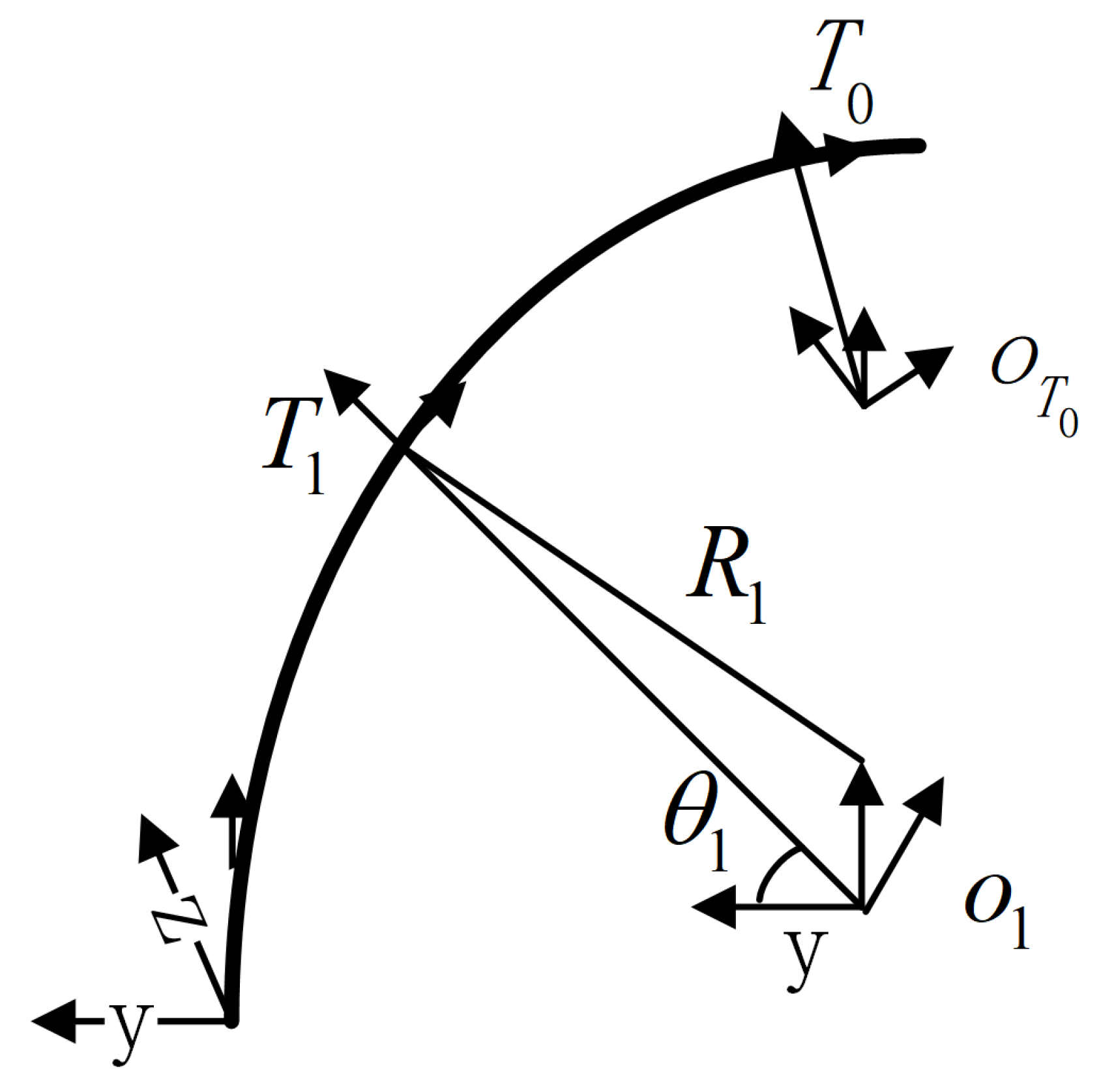
Considering that the orbit center line is a plane curve and parallel to the horizontal plane, the position vector of the coordinate origin of
in the reference system
O can be obtained from
Figure 5:
where
,
is the radius of the curve at the origin of
and
is the direction angle.
Since the
z-axis of coordinate system
is parallel to the
z-axis of coordinate system
O, the attitude of
is formed by rotating
clockwise around the
z-axis, so it has:
Then, the posture matrix of
relative to
O is obtained as follows:
Similarly, the posture matrix of
to
O is obtained as follows:
Furthermore, the equation of the posture matrix of
to
is obtained as follows:
After setting the auxiliary coordinate systems
and
, the posture matrix of
in coordinate system
can be easily obtained:
Similarly, the posture matrix of
in coordinate system
can be obtained:
According to Equations (26)–(28), the posture matrix of the coordinate system
to the fixed coordinate system
can be obtained:
The relative posture relations of
and
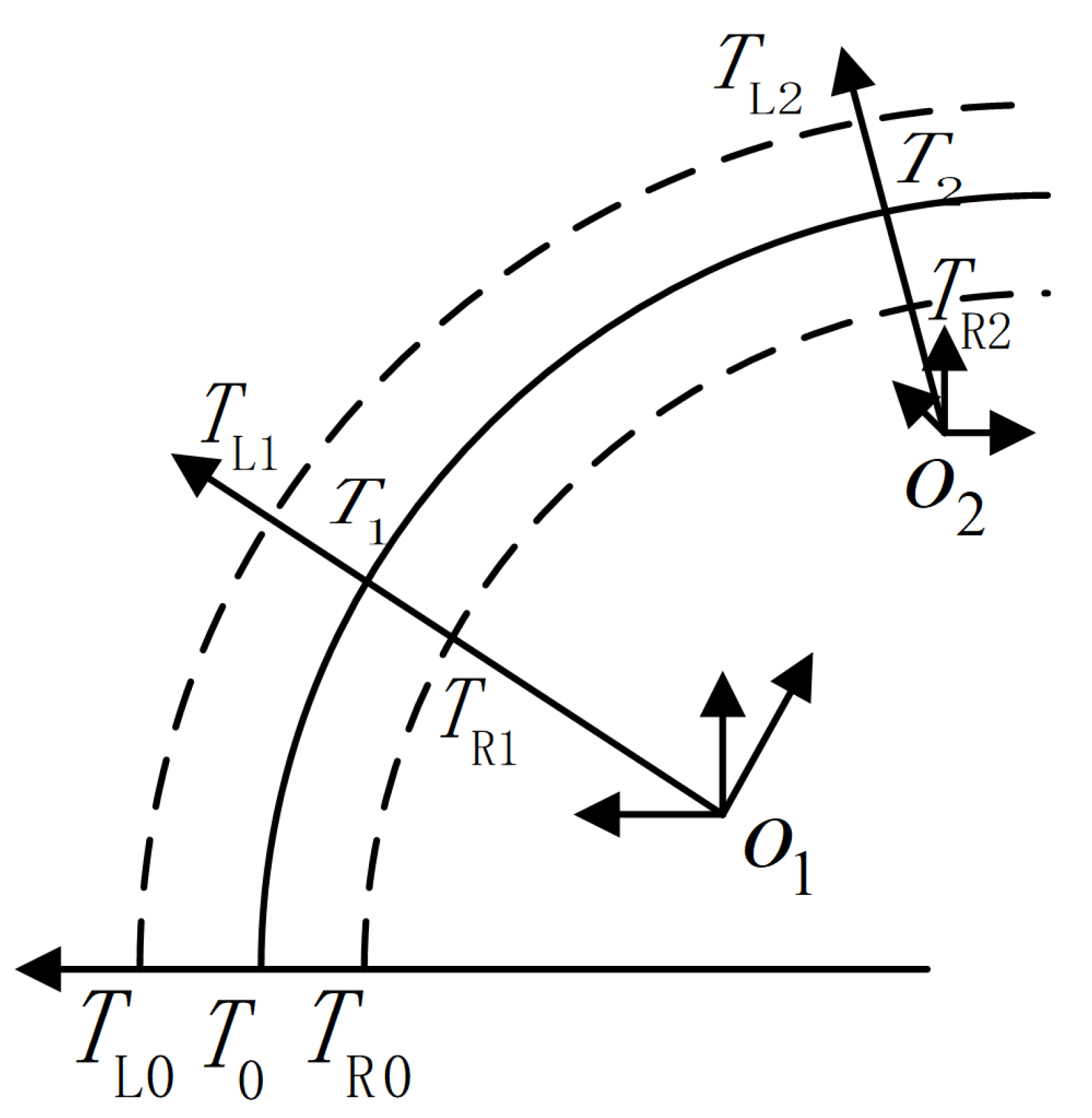
cannot directly reflect the posture relations of both sides of the track. For this reason, the coordinate system
is established on the left track of the transition curve corresponding to the center line coordinate system
, and the coordinate system
is established on the right track. The characteristics of the transition curve determine that the origins of
and
are located on the
y-axis of the
coordinate system, and the distance from the origin of
is, respectively,
(
D is gauge). The coordinate system is shown in
Figure 6.
As for attitude, the
x-axis of
is along the tangent direction of the right side rail and the
x-axis of
is along the tangent direction of the left side rail. There is an angle between them and the
x-axis of
. The spatial relationship is shown in
Figure 5.
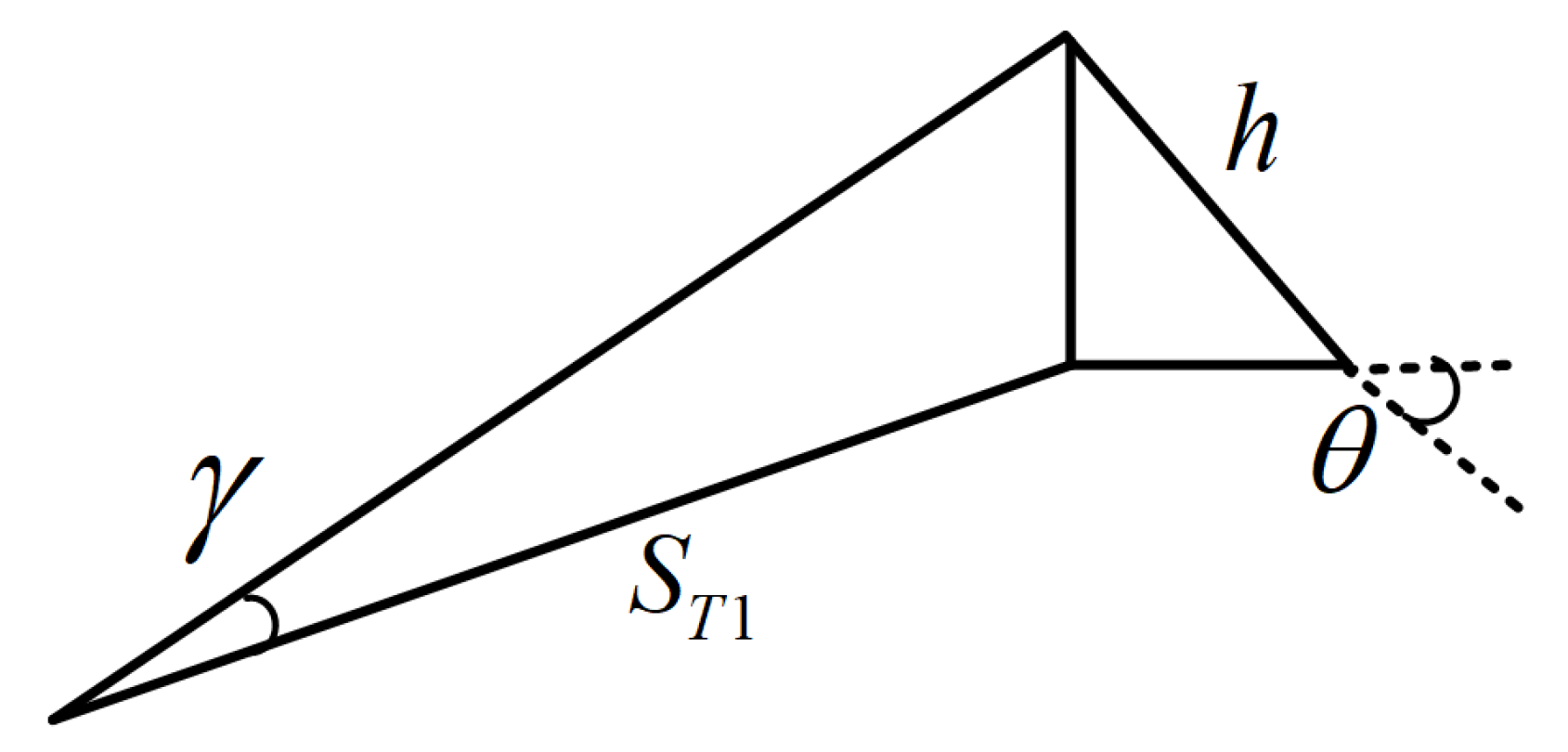
The angle
can be approximated to the ratio between the track super high
h and the mileage
s:
When the parameters of the transition curve are determined,
h is a constant. Thus, the posture matrix of
relative to
can be obtained as follows:
By combining Equation (
29) with Equation (
31), it can be obtained:
Similarly, the posture matrix
of
relative to
is obtained:
By combining Equation (
29) with Equation (
33), it can be obtained:
Equations (32) and (34) are the posture matrices of the track coordinate system relative to the track reference coordinate system.
4.2. The Track Coordinate System on the Transition Curve
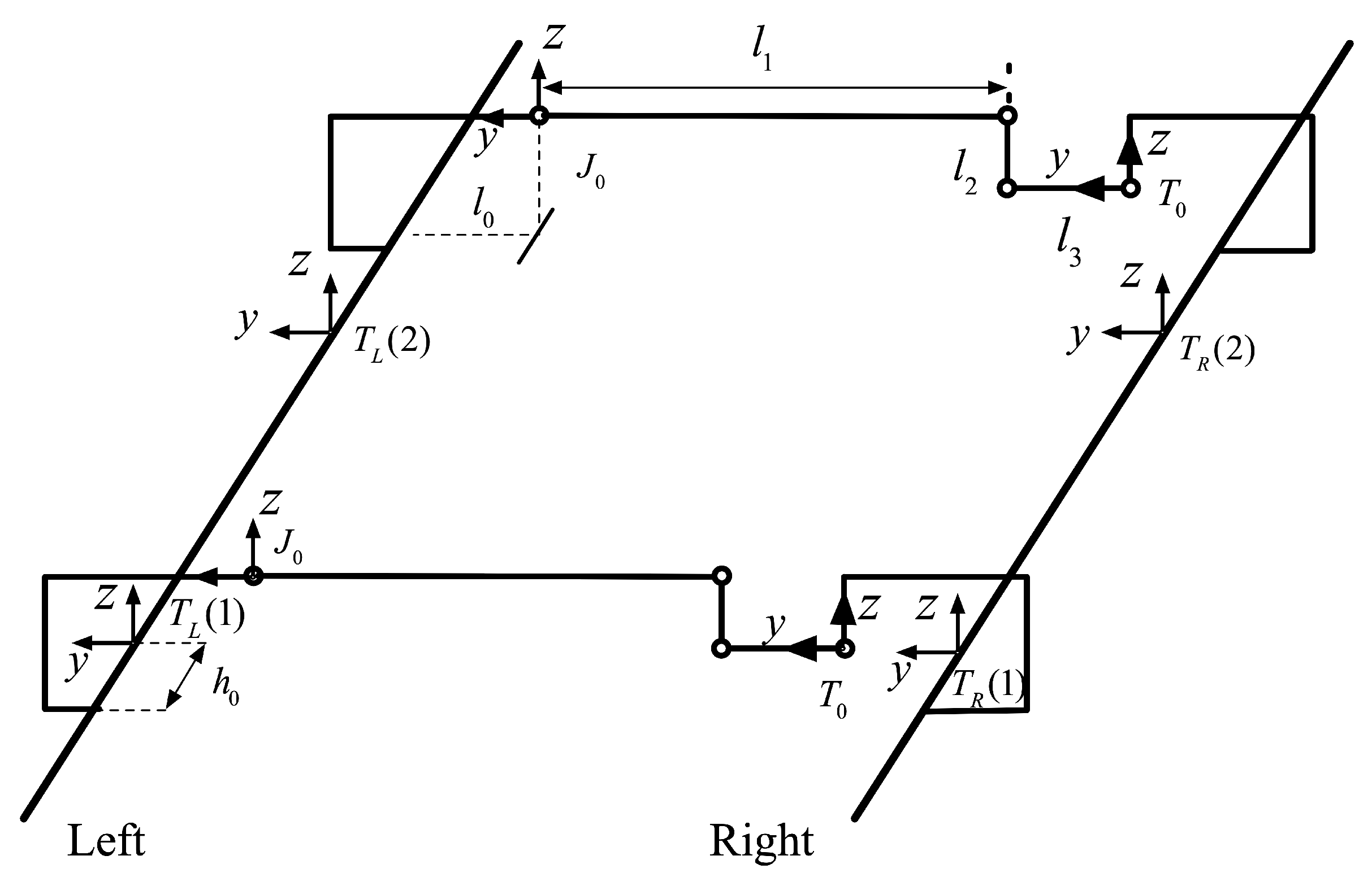
The left/right tracks of the transition curve are not coplanar, and their common role determines the motion of the vehicle. At the same time, the radius of curvature and the transverse slope angle of each point on the transition curve are different. When the track is close to the end of the circular curve, its radius of curvature is the smallest and the angle of transverse slope is the largest, which is the part that requires more stringent vehicle structure. Therefore, this paper puts the vehicle at this end for analysis.
Generally speaking, the length of the electromagnet is about several meters, while the radius of the transition curve and circular curve is about 100–1000 m. Therefore, the error of replacing the arc length (mileage) of the track with the space distribution length of the electromagnet can be neglected.
Figure 7 shows the spatial relationship between the electromagnets on both sides of the vehicle and the track.
In
Figure 7,
l is the length of the electromagnet and
is the distance between adjacent suspension frames. Taking the right side as an example, with the first coordinate system
as the starting point, the distance between
and
is as follows:
where
i denotes the label of the coordinate system
and
is the upward rounding function.
The parameter
is brought into Equation (
35), and the span between the coordinate system
and
is calculated as
. If the total length of the transition curve is
, the starting point of the mileage of
is set to
. Thus, the mileage of each
relative to the reference system
O becomes:
On the right side of the vehicle, the mileage of five electromagnet midpoints to the reference system
O becomes:
The track reference coordinate system
is located at the midpoint of the vehicle body span mileage on the track center line. Its mileage is:
According to Equations (36) and (37), the position vector of
relative to
can be obtained as follows:
By introducing Equations (37) and (38) into Equation (
29), the posture matrix of the mid-point of five electromagnets is obtained as follows:
By Equations (39) and (40), the posture matrix of
relative to track reference coordinate system
is obtained as follows:
Similarly, the posture matrix of
relative to track reference coordinate system
can be expressed as:
Thus, the posture matrix of
relative to track reference coordinate system
can be also expressed as:
The posture relationship of the right track coordinate system with respect to the left track coordinate system is:
4.3. The Posture Matrix of Train Reference System Relative to Track Reference System
The curvature of the transition curve changes with the length gradually, and the relative relationship between the front/rear of the train body and the track is asymmetric. However, the relative motion of electromagnet and train body in the horizontal direction (
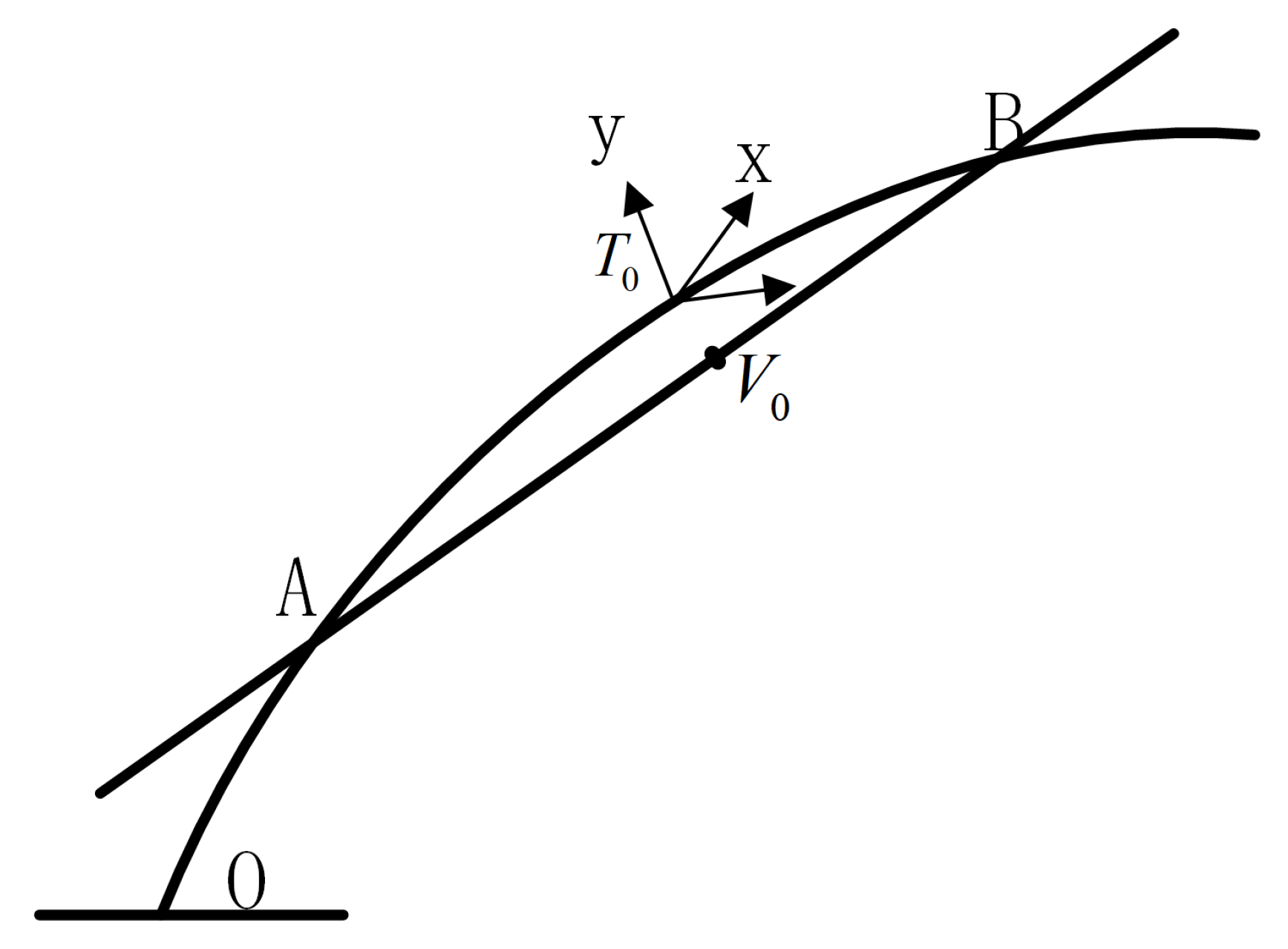
y-direction) is limited by the rotating sliding table between the suspension frames 1(4) and suspension frames 2(5) on the train body. This paper analyses the movement of the vehicle to the large curvature end of the transition curve. The relative relationship between the train and the transition curve is shown in
Figure 8.
In
Figure 8, the length of
can be calculated from the structure of the vehicle:
According to Equation (
38), the mileage of
A and
B are:
The position vectors
and
of
A and
B can be obtained by using Equation (
29). At the same time, the body reference system
is located at the midpoint of the line segment
, so the position vector of
in
is:
Note: The nominal height
of the secondary system with the difference in the
z-direction between
and
is directly added to the third term of Equation (
48).
Because of the balance of forces, it is generally believed that the posture of the body reference system is the same as that of the track reference system. Therefore, the posture matrix of
in
can be obtained as follows:
Thus far, the posture matrix of the train body constrained coordinate system
and
relative to the track constrained coordinate system
and
are obtained:
In Equations (50) and (51),
and
are determined by Equations (42) and (43),
is determined by Equation (
49), and
and
can be obtained by the posture matrix of the coordinate system in the left/right sliding table relative to that of the reference coordinate system in the train body.
The posture matrix and describes the posture relationship from the train-constrained coordinate system to the track-constrained coordinate system, and also determines the motion of the suspension frame and the secondary system. Using these pose matrices, the motion range of the secondary system, suspension frame and other parts in the train can be calculated, which provides an accurate basis for the design.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}