
Drone-Based Identification of Erosive Processes in Open-Pit Mining Restored Areas

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
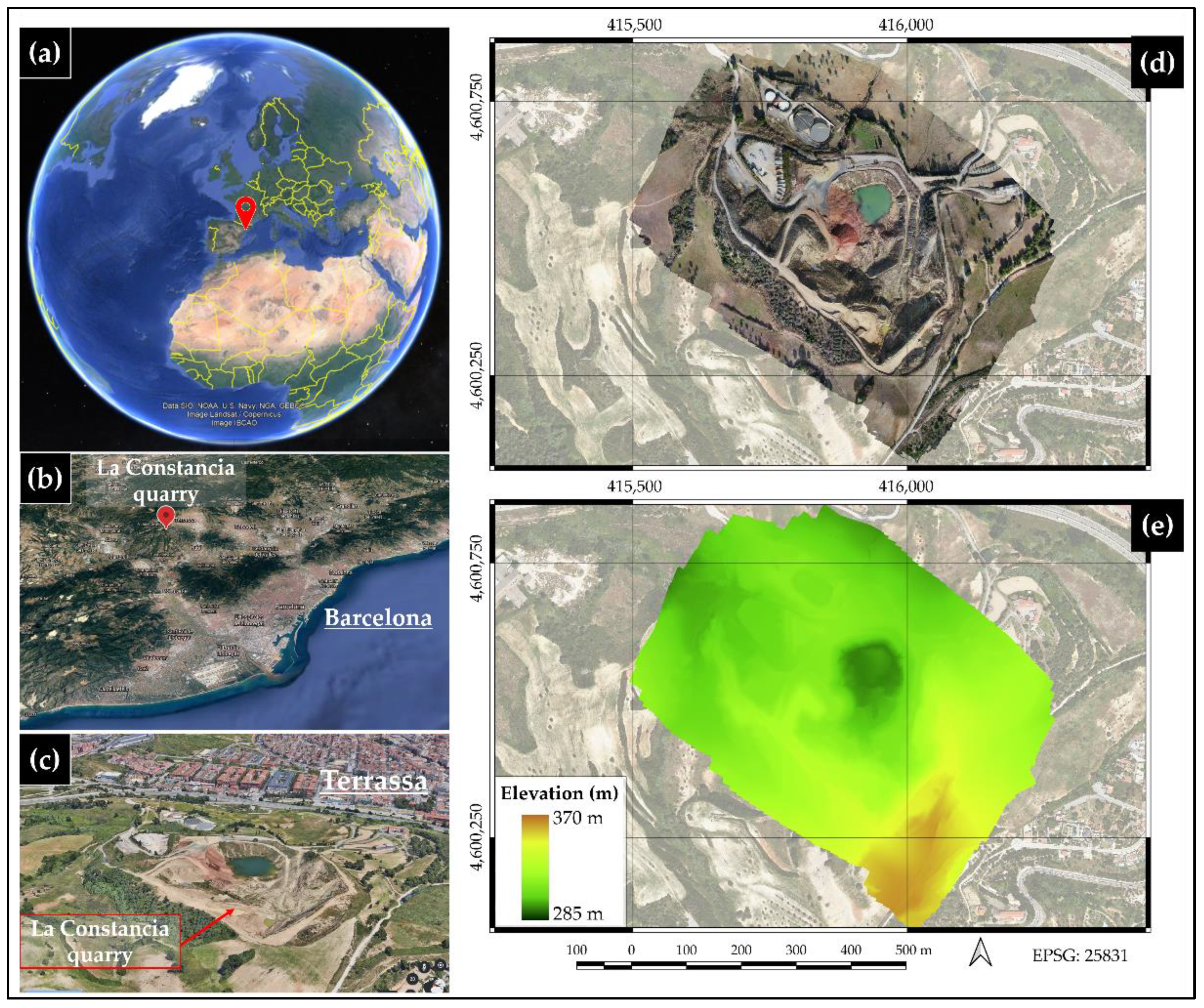
2.1. Study Area
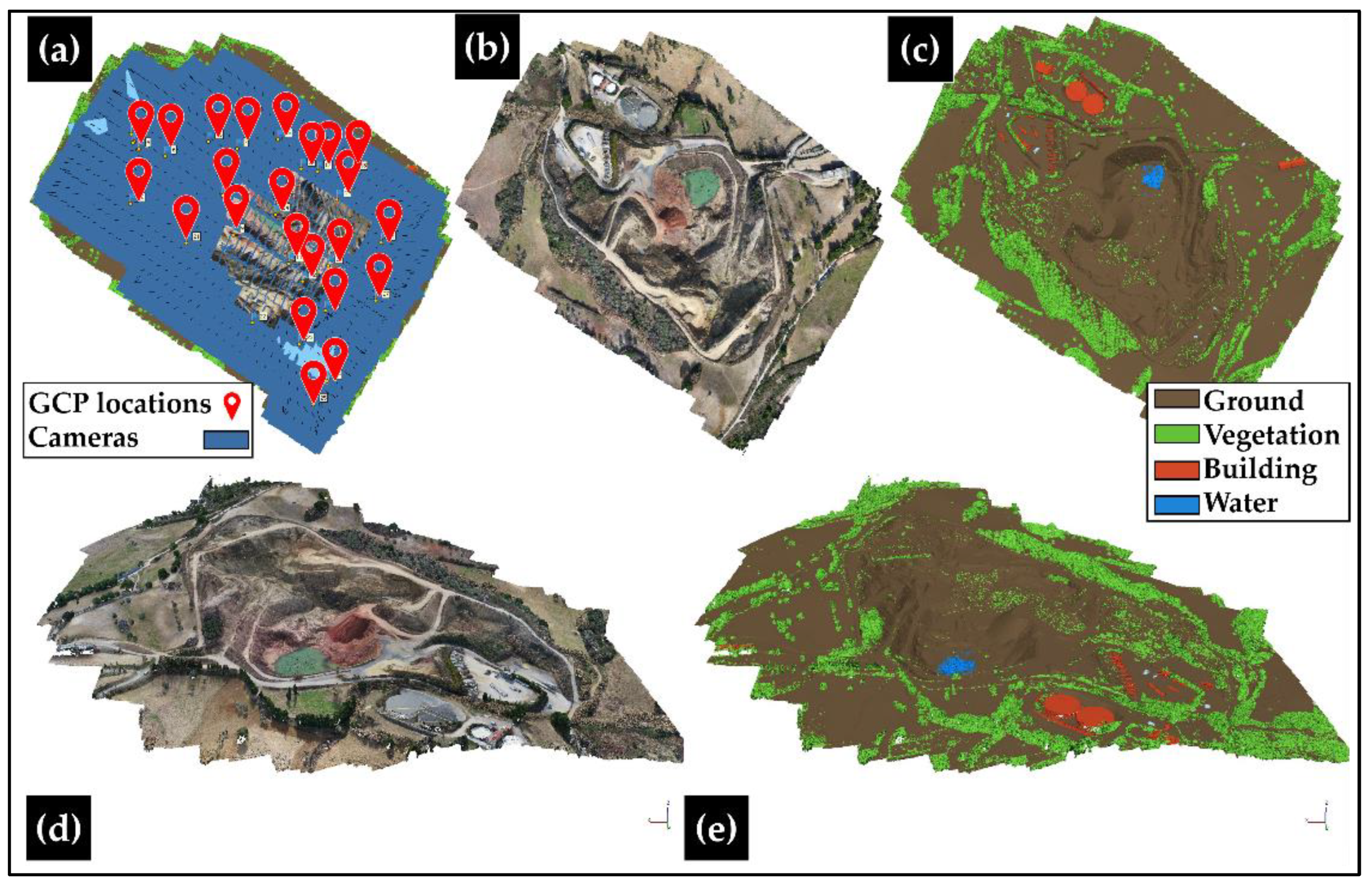
2.2. Unmanned Aerial Vehicle (UAV), Image Sensor and Flight Planning
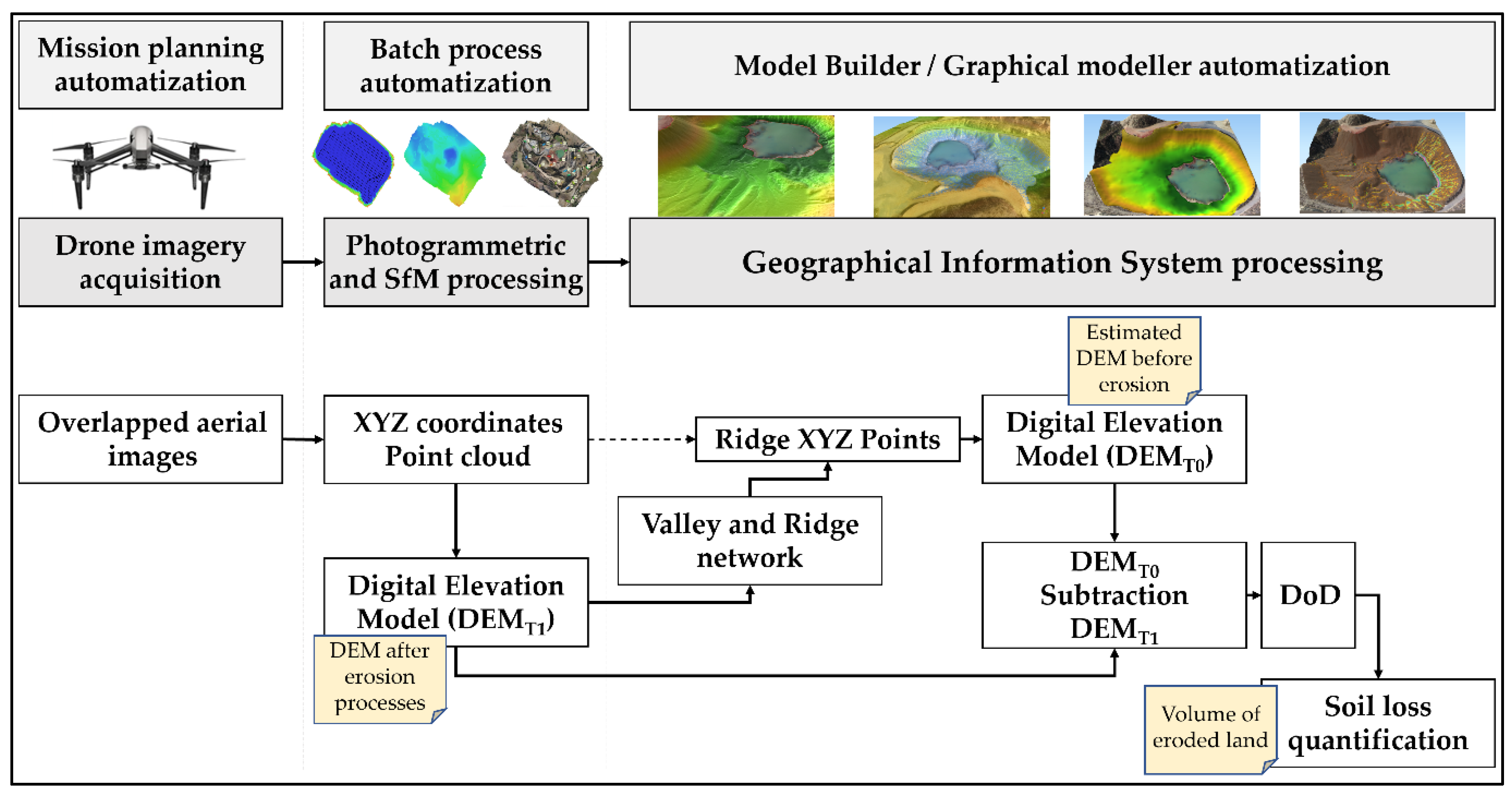
2.3. Methodology
3. Results
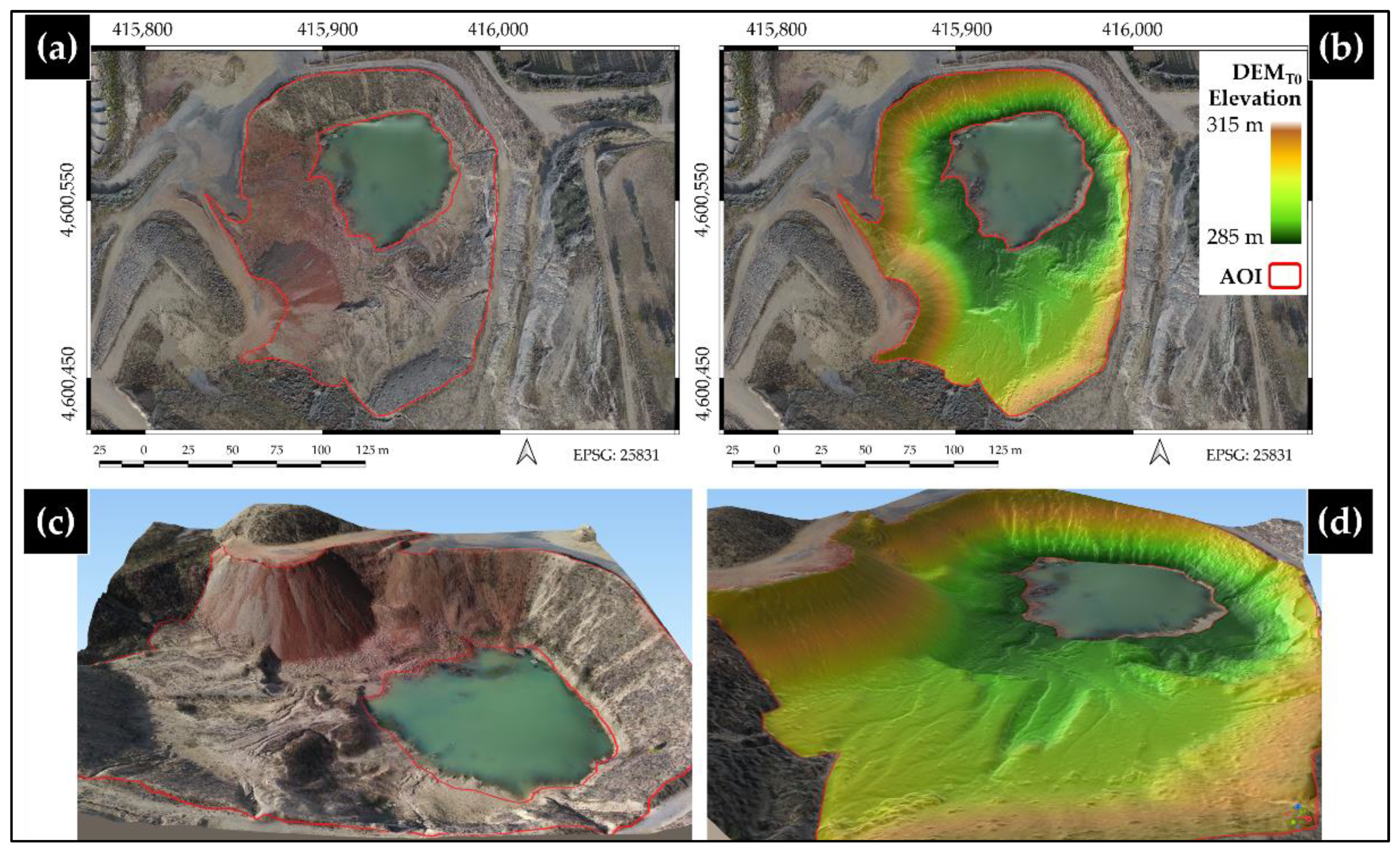
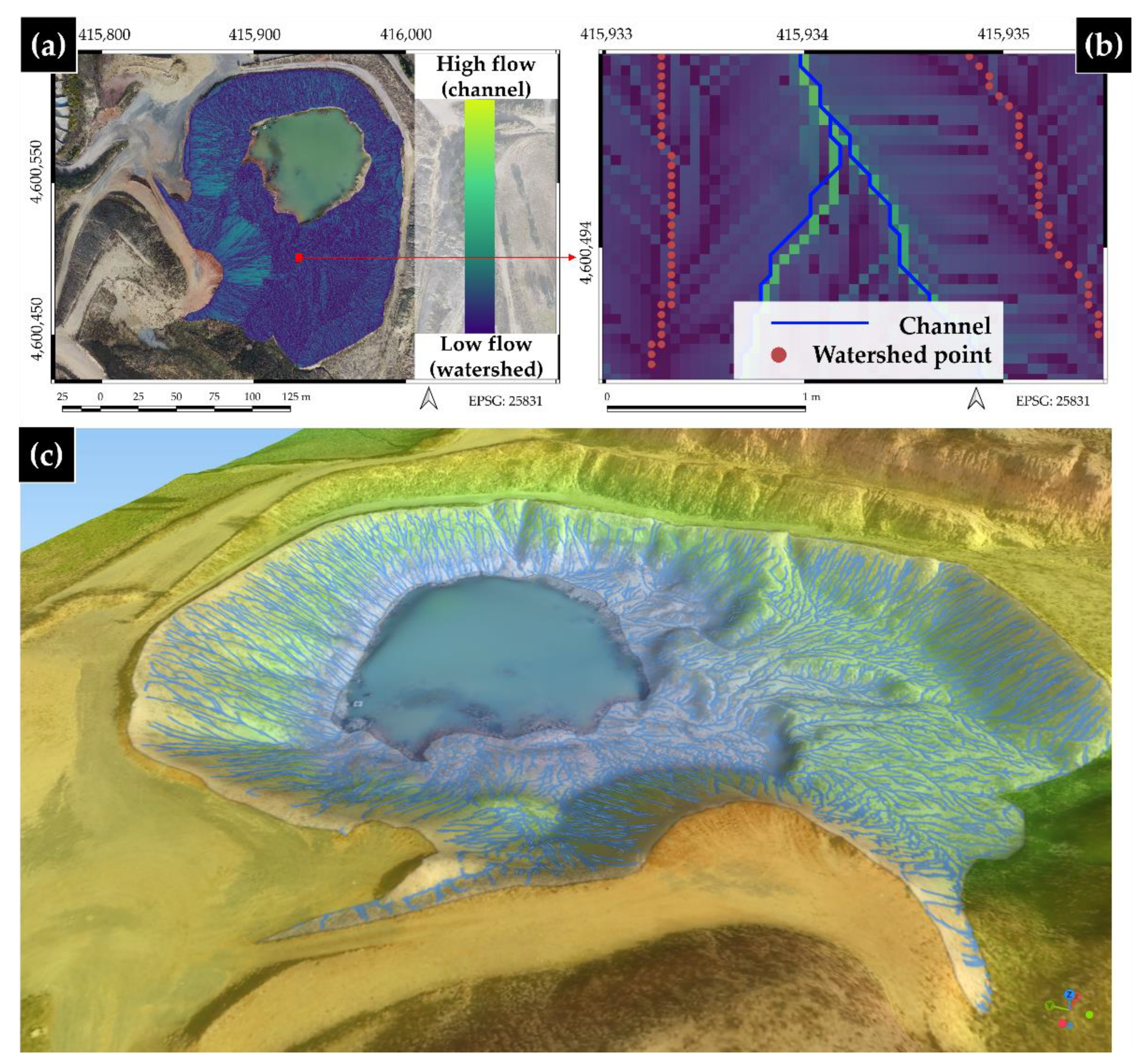
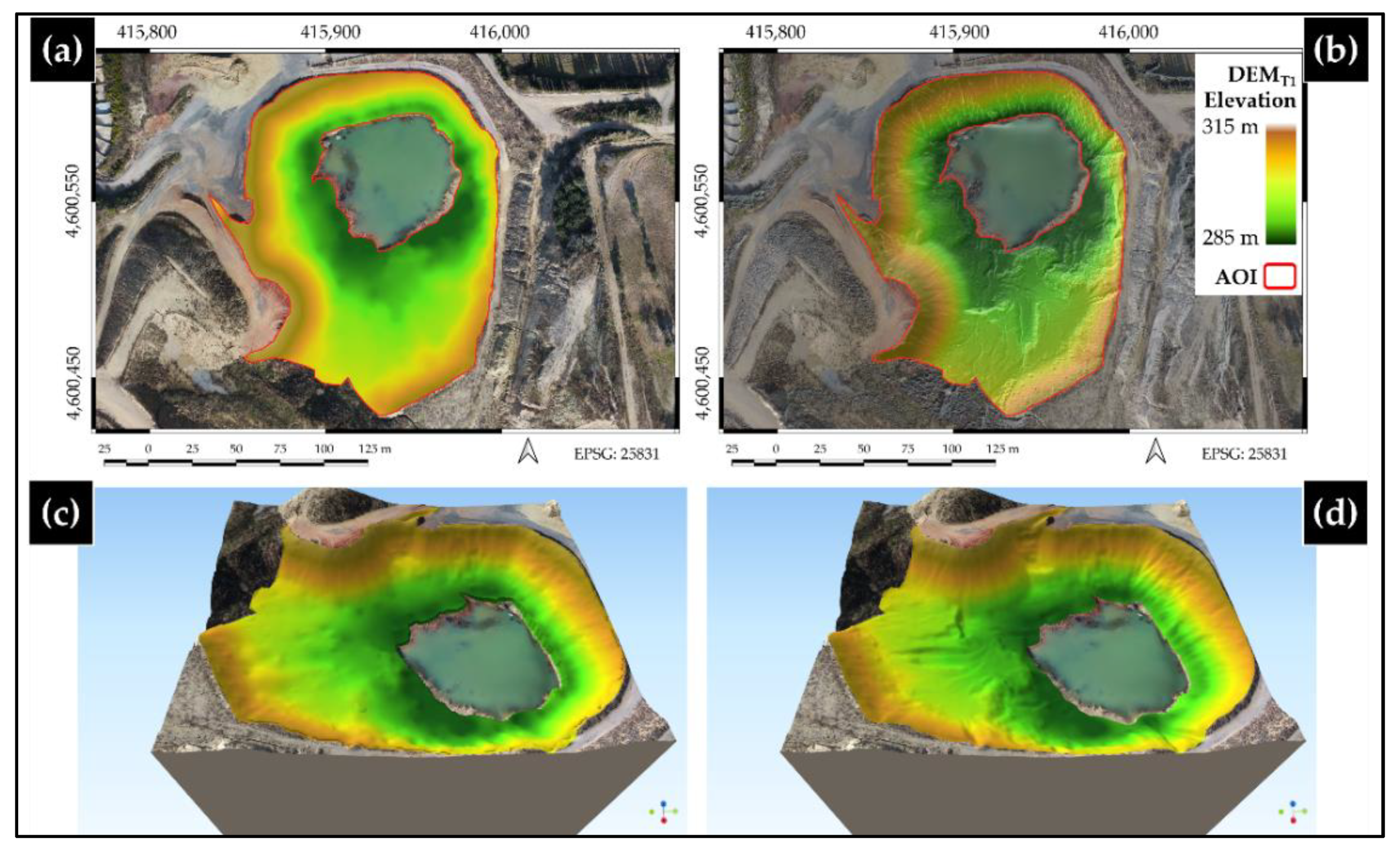
3.1. Morphometric Analysis and Drainage Network
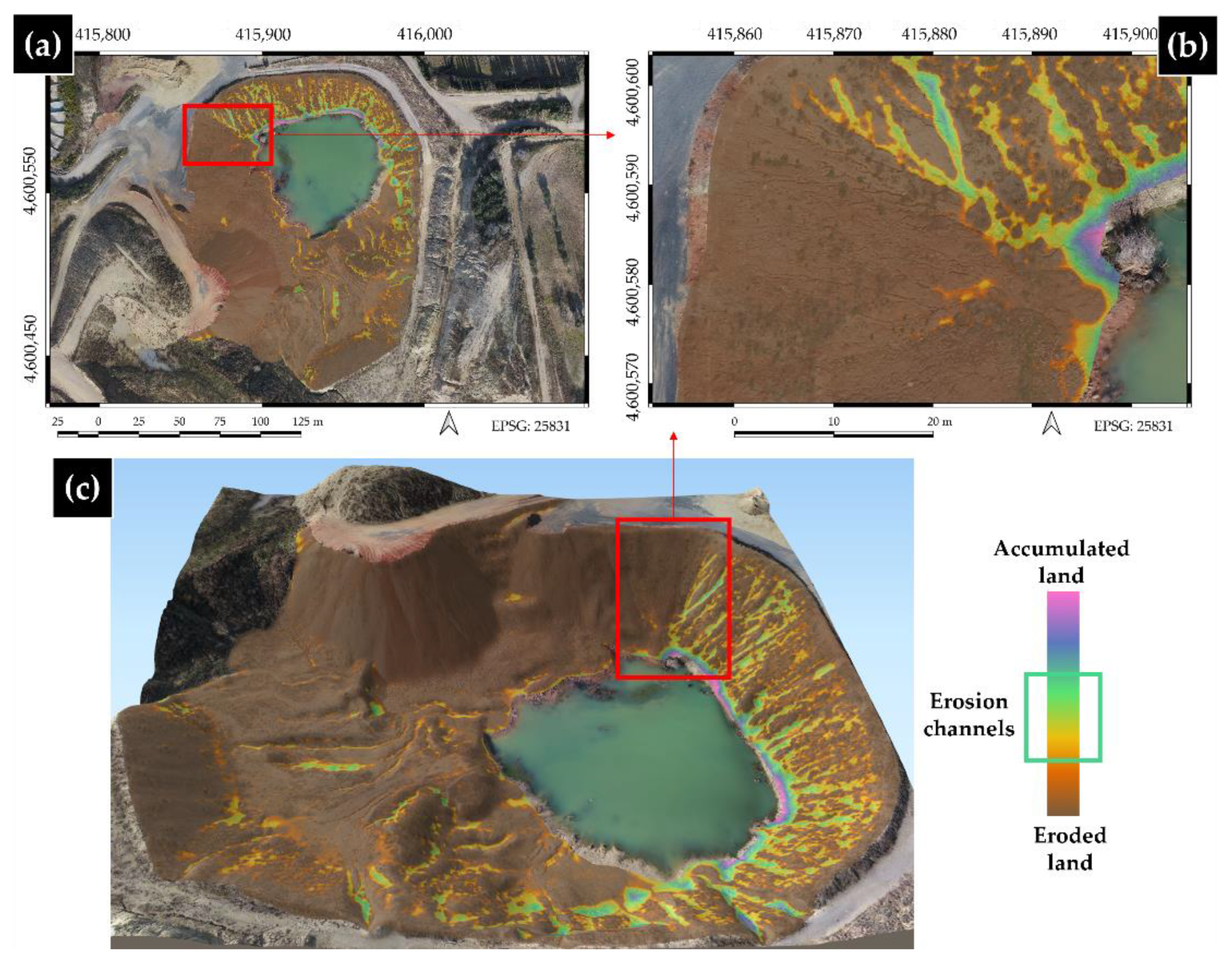
3.2. Erosion Estimation
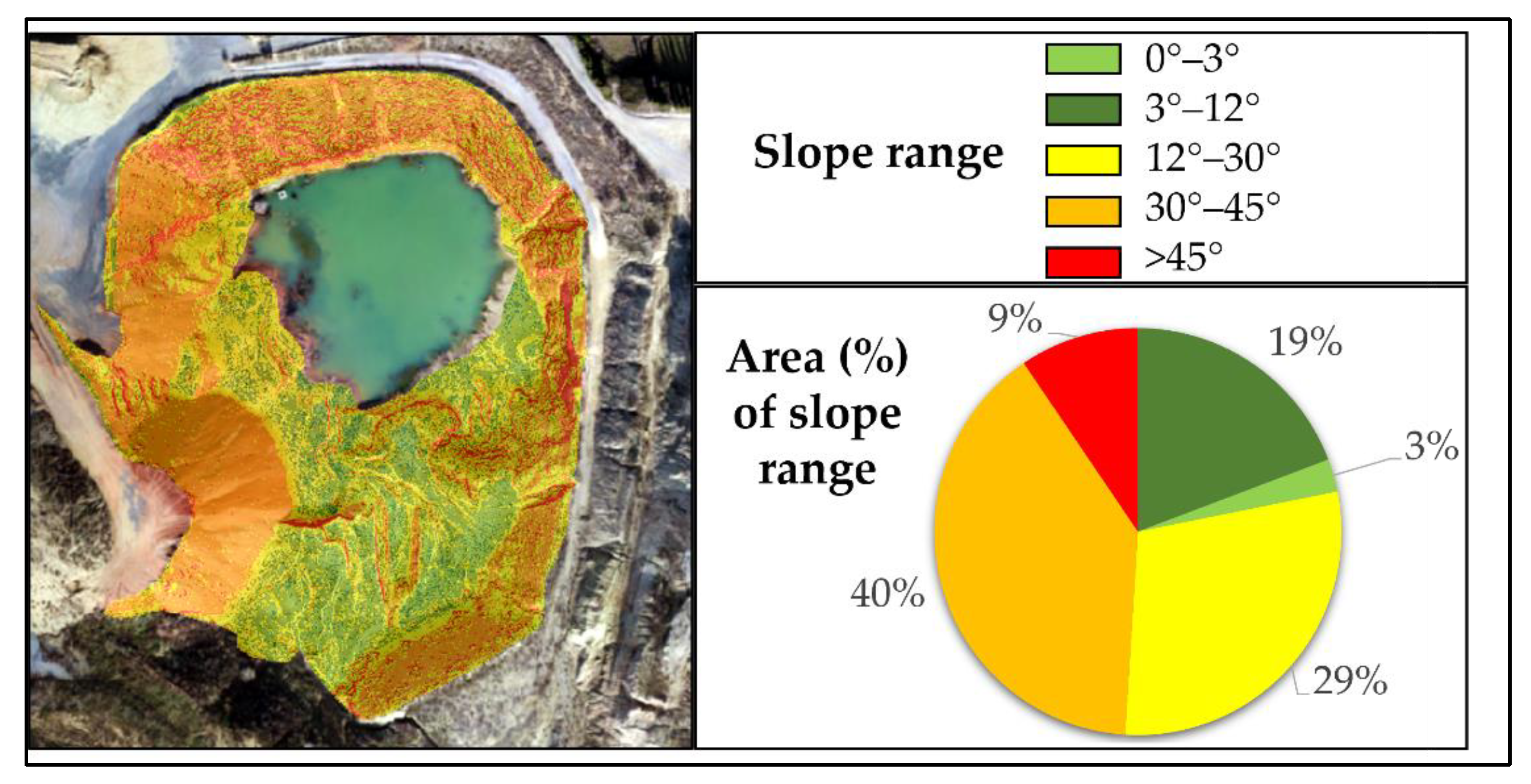
3.3. Slopes and Erosion Identification
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Commission. Internal Market, Industry, Entrepreneurship and SMEs. Available online: https://ec.europa.eu/growth/sectors/raw-materials/eip/strategic-implementation-plan_en (accessed on 19 January 2022).
- Altiti, A.H.; Alrawashdeh, R.O.; Alnawafleh, H.M. Open Pit Mining, Mining Techniques—Past, Present and Future, 1st ed.; Abhay, S., Ed.; IntechOpen: London, UK, 2021; Available online: https://www.intechopen.com/chapters/71931 (accessed on 19 January 2022).
- United Nations, and Deutsche Stiftung für Internationale Entwicklung. Mining and the Environment: The Berlin Guidelines: A Study Based on an International Round Table in June 1991, Organized by the Department of Technical Co-Operation for Development, United Nations, and the Development Policy Forum of the German Foundation for International Development; Mining Journal Books: London, UK, 1992. [Google Scholar]
- Narendra, B.H.; Siregar, C.A.; Turjaman, M.; Hidayat, A.; Rachmat, H.H.; Mulyanto, B.; Maharani, R. Managing and Reforesting Degraded Post-Mining Landscape in Indonesia: A Review. Land 2021, 10, 658. [Google Scholar] [CrossRef]
- Segura-Salazar, J.; Tavares, L.M. Sustainability in the Minerals Industry: Seeking a Consensus on Its Meaning. Sustainability 2018, 10, 1429. [Google Scholar] [CrossRef] [Green Version]
- United Nations Environment Programme. Sustainability Reporting in the Mining Sector. Current Status and Future Trends. 2020. Available online: https://www.unep.org/resources/report/sustainability-reporting-mining-sector (accessed on 19 January 2022).
- Organization for Economic Co-operation and Development. OECD Brochure: A Global Standard: Towards Responsible Mineral Supply Chains. 2020. Available online: https://mneguidelines.oecd.org/Brochure_OECD-Responsible-Mineral-Supply-Chains.pdf (accessed on 19 January 2022).
- Government of China. The 13th Five Year Plan for Economic and Social Development of the People’s Republic of China (2016–2020). 2016. Available online: https://en.ndrc.gov.cn/policies/202105/P020210527785800103339.pdf (accessed on 19 January 2022).
- Canadian Government. The Canadian Minerals and Metals Plan. 2020. Available online: https://www.minescanada.ca/sites/default/files/cmmp-actionplan2020_rev52_feb_29_2020-a_en.pdf (accessed on 19 January 2022).
- Minerals Council South Africa. Modernization: Towards the Mine of Tomorrow. 2020. Available online: https://www.mine2030.co.za/ (accessed on 19 January 2022).
- Government of Colombia. Decreto 1076 de 2015 Sector Ambiente y Desarrollo Sostenible. 2015. Available online: https://www.funcionpublica.gov.co/eva/gestornormativo/norma.php?i=78153 (accessed on 19 January 2022).
- Australian Government. Mine Rehabilitation. Leading Practice Sustainable Development Program for the Mining Industry. 2016. Available online: https://www.industry.gov.au/sites/default/files/2019-04/lpsdp-mine-rehabilitation-handbook-english.pdf (accessed on 19 January 2022).
- Government of Spain. Real Decreto-ley 975/2009, del 12 de Junio, Sobre Gestión de los Residuos de las Industrias Extractivas y de Protección y Rehabilitación del Espacio Afectado por Actividades Mineras. 2009. Available online: https://www.boe.es/buscar/act.php?id=BOE-A-2009-9841 (accessed on 19 January 2022).
- Huang, Y.; Espley, S. A 3D mine simulation model for decision-making in mine design and production. International Journal of Surface Mining. Reclam. Environ. 2005, 19, 251–259. [Google Scholar] [CrossRef]
- Ramli, M.; Thamrin, M.; Asrafil, M. Analysis of Soil Erosion on Mine Area. IOP Conf. Ser. Mater. Sci. Eng. 2020, 875, 012052. [Google Scholar] [CrossRef]
- Wischmeier, W.H.; Smith, D.D. Predicting Rainfall Erosion Losses: A Guide to Conservation Planning with Universal Soil Loss Equation (USLE); Agriculture Handbook; Department of Agriculture: Washington, DC, USA, 1978.
- Renard, K.G.; Foster, G.R.; Weesies, G.A.; Porter, J.P. RUSLE: Revised universal soil loss equation. J. Soil Water Conserv. 1991, 46, 30–33. [Google Scholar]
- Duarte, L.; Cunha, M.; Teodoro, A.C. Comparing Hydric Erosion Soil Loss Models in Rainy Mountainous and Dry Flat Regions in Portugal. Land 2021, 10, 554. [Google Scholar] [CrossRef]
- Barrena-González, J.; Rodrigo-Comino, J.; Gyasi-Agyei, Y.; Pulido Fernández, M.; Cerdà, A. Applying the RUSLE and ISUM in the Tierra de Barros Vineyards (Extremadura, Spain) to Estimate Soil Mobilisation Rates. Land 2020, 9, 93. [Google Scholar] [CrossRef] [Green Version]
- Jaramillo, R.; Padró, J.-C. Generación de cartografía a partir de imágenes captadas con dron de ala fija, asociada a proyectos hidráulicos fluviales. GeoFocus 2020, 26, 93–117. [Google Scholar] [CrossRef]
- Guirado, R.; Padró, J.-C.; Zoroa, A.; Olivert, J.; Bukva, A.; Cavestany, P. StratoTrans: Unmanned Aerial System (UAS) 4G Communication Framework Applied on the Monitoring of Road Traffic and Linear Infrastructure. Drones 2021, 5, 10. [Google Scholar] [CrossRef]
- Yaqiu, Y.; Cunhao, J.; Jing, L.; Jie, W.; Xing, J.; Hao, W.; Yu, X.; Lushou, Z. Mining Ground Surface Information Extraction and Topographic Analysis Using UAV Video Data. In Proceedings of the E3S Web of Conferences, Shanghai, China, 18–20 September 2020; Volume 194, p. 05030. [Google Scholar] [CrossRef]
- Andras, M.; Domozi, Z. Tracking Production Volumes of Open-Pit Mines with Photogrammetry. In Proceedings of the 2017 European Modelling Symposium (EMS), Manchester, UK, 20–21 November 2017; pp. 100–106. [Google Scholar] [CrossRef]
- Honarmand, M.; Shahriari, H. Geological Mapping Using Drone-Based Photogrammetry: An Application for Exploration of Vein-Type Cu Mineralization. Minerals 2021, 11, 585. [Google Scholar] [CrossRef]
- Carabassa, V.; Montero, P.; Alcañiz, J.M.; Padró, J.-C. Soil Erosion Monitoring in Quarry Restoration Using Drones. Minerals 2021, 11, 949. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben-Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef] [Green Version]
- Padró, J.C.; Carabassa, V.; Balagué, J.; Brotons, L.; Alcañiz, J.; Pons, X. Monitoring opencast mine restorations using Unmanned Aerial System (UAS) imagery. Sci. Total Environ. 2018, 657, 1602–1614. [Google Scholar] [CrossRef]
- Carabassa, V.; Montero, P.; Crespo, M.; Padró, J.C.; Balagué, J.; Alcañiz, J.M.; Brotons, L.; Pons, X. UAS Remote Sensing Products for Supporting Extraction Management and Restoration Monitoring in Open-Pit Mines. Proceedings 2019, 30, 4. [Google Scholar] [CrossRef] [Green Version]
- Carabassa, V.; Montero, P.; Crespo, M.; Padró, J.C.; Pons, X.; Balagué, J.; Brotons, L.; Alcañiz, J. Unmanned aerial system protocol for quarry restoration and mineral extraction monitoring. J. Environ. Manag. 2020, 270, 110717. [Google Scholar] [CrossRef]
- ICGC. Mapa Geològic de Catalunya. Institut Cartogràfic i Geològic de Catalunya. 2021. Available online: http://betaportal.icgc.cat/visor/client_utfgrid_geo.html (accessed on 19 January 2022).
- SMC. Xarxa Agrometeorològica de Catalunya (Estació Sabadell-Parc Agrari). Servei Meteorològic de Catalunya. 2022. Available online: https://ruralcat.gencat.cat/agrometeo.estacions (accessed on 19 January 2022).
- Padró, J.-C.; Muñoz, F.J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 130–140. [Google Scholar] [CrossRef]
- DJI. Inspire 2 User Manual v1.0 2016.12. 2016. Available online: https://dl.djicdn.com/downloads/inspire_2/INSPIRE+2+User+Manual+.pdf (accessed on 19 January 2022).
- Agisoft LLC. Agisoft Metashape User Manual: Professional Edition, Version 1.5. 2019. Available online: https://www.agisoft.com/pdf/metashape-pro_1_5_en.pdf (accessed on 19 January 2022).
- ESRI. ArcGIS Desktop: Release 10.8; Environmental Systems Research Institute: Redlands, CA, USA, 2016. [Google Scholar]
- Pons, X. MiraMon. Sistema d’Informació Geogràfica i Software de Teledetecció. Versió 8.1f [MiraMon. Geographical Information System and Remote Sensing Software. Version 8.2e]. Centre de Recerca Ecològica i Aplicacions Forestals, CREAF. Bellaterra. 2021. Available online: http://www.creaf.uab.cat/miramon/Index_usa.htm (accessed on 19 January 2022).
- QGIS.org. QGIS Geographic Information System. QGIS Association. 2021. Available online: http://www.qgis.org (accessed on 19 January 2022).
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Wichmann, V.; Böhner, J. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef] [Green Version]
- Lugo-Hubp, J.I. Elementos de Geomorfología Aplicada (Métodos Cartográficos): Universidad Nacional Autónoma de México; Instituto de Geografía: México City, Mexico, 1988; 128p. [Google Scholar]
- Wang, L.; Liu, H. An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. Int. J. Geogr. Inf. Sci. 2006, 20, 193–213. [Google Scholar] [CrossRef]
- Wood, J. Geomorphometry in LandSerf. In Geomorphometry: Concepts, Software, Applications. Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 333–349. [Google Scholar]
- Fairfield, J.; Leymarie, P. Drainage Networks from Grid Digital Elevation Models. Water Resour. Res. 1991, 27, 709–717. [Google Scholar] [CrossRef]
- Williams, R.D. DEMs of Difference. In Geomorphological Techniques (Online Edition); Cook, S.J., Clarke, L.E., Nield, J.M., Eds.; British Society for Geomorphology: London, UK, 2012; pp. 1–17. [Google Scholar]
- Chesworth, W. (Ed.) Encyclopedia of Soil Science; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 978-1-4020-3994-2. [Google Scholar]
- Farek, V.; Unucka, J.; Ponfzilova, I.; Gergerova, M.; Židek, D.; Pallos, R. Assessment of the runoff conditions of small ungauged catchments using GIS and fully distributed hydrologic models. Acta Montan. Slovaca 2014, 19, 22–30. [Google Scholar]
- Krusekopf, H.H. The effect of slope on soil erosion. In University of Missouri Agricultural Experimental Station Research Bulletin; University Archives of the University of Missouri-Columbia: Columbia, MI, USA, 1943; p. 363. [Google Scholar]
- Pons, X.; Padró, J.-C. An Operational Radiometric Correction Technique for Shadow Reduction in Multispectral UAV Imagery. Remote Sens. 2021, 13, 3808. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Range (Degrees) | Area (m2) | Volume (m3) | Area of Slope Range (%) |
|---|---|---|---|
| 0–3 | 191.1 | 357.7 | 3 |
| 3–12 | 1117.6 | 2462.3 | 19 |
| 12–30 | 1569.1 | 3923.0 | 29 |
| 30–45 | 1903.1 | 6495.5 | 40 |
| >45 | 640.6 | 2176.2 | 9 |
| Total | 18,224 | 15,414.7 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Padró, J.-C.; Cardozo, J.; Montero, P.; Ruiz-Carulla, R.; Alcañiz, J.M.; Serra, D.; Carabassa, V. Drone-Based Identification of Erosive Processes in Open-Pit Mining Restored Areas. Land 2022, 11, 212. https://doi.org/10.3390/land11020212
Padró J-C, Cardozo J, Montero P, Ruiz-Carulla R, Alcañiz JM, Serra D, Carabassa V. Drone-Based Identification of Erosive Processes in Open-Pit Mining Restored Areas. Land. 2022; 11(2):212. https://doi.org/10.3390/land11020212
Chicago/Turabian StylePadró, Joan-Cristian, Johnsson Cardozo, Pau Montero, Roger Ruiz-Carulla, Josep Maria Alcañiz, Dèlia Serra, and Vicenç Carabassa. 2022. "Drone-Based Identification of Erosive Processes in Open-Pit Mining Restored Areas" Land 11, no. 2: 212. https://doi.org/10.3390/land11020212