
A Discrete-Time Homing Problem with Two Optimizers

Department of Mathematics and Industrial Engineering, Polytechnique Montréal, 2500, Chemin de Polytechnique, Montréal, QC H3T 1J4, Canada
Games 2023, 14(6), 68; https://doi.org/10.3390/g14060068
Submission received: 20 September 2023
/
Revised: 15 October 2023
/
Accepted: 25 October 2023
/
Published: 27 October 2023
(This article belongs to the Special Issue Applications of Game Theory with Mathematical Methods)
Abstract
:A stochastic difference game is considered in which a player wants to minimize the time spent by a controlled one-dimensional symmetric random walk in the continuation region , and the second player seeks to maximize the survival time in C. The process starts at and the game ends the first time . An exact expression is derived for the value function, from which the optimal solution is obtained, and particular problems are solved explicitly.
1. Introduction
A deterministic one-dimensional two-player linear-quadratic (nonzero-sum) difference game can be defined as follows (see, for example, [1]):
for , where , and are deterministic functions, the control (respectively, ) gives the decision of player 1 (respectively, player 2) at time n. Each player has a general quadratic cost function that he/she tries to minimize.
The difference game can be made stochastic by adding the random variable in Equation (1). The random variables are assumed to be independent and identically distributed.
The final time T can be finite or infinite. Reddy and Zaccour [2] considered a class of non-cooperative N-player finite-horizon linear-quadratic dynamic games with linear constraints. Lin [3] studied the Stackelberg strategies in the infinite horizon LQ mean-field stochastic difference game. Liu et al. [4] used an adaptive dynamic programming approach to solve the infinite horizon linear quadratic Stackelberg game problem for unknown stochastic discrete-time systems with multiple decision makers. Ju et al. [5] used dynamic programming to obtain an optimal linear strategy profile for a class of two-player finite-horizon linear-quadratic difference games.
In this paper, we consider the one-dimensional controlled Markov chain defined by
where with probability 1/2 and the random variables are independent, so that is a (controlled) symmetric random walk. The chain starts at .
We define the first-passage time
Our aim is to find the controls and that minimize the expected value of the cost function
where is a positive constant. This parameter gives the penalty incurred for survival in the continuation region . It is needed to obtain a well-defined problem. Indeed, if we set , then the optimal solution for the first (respectively, second) player is trivially to choose (respectively, ).
Thus, there are two optimizers. The first one, using , would like the Markov chain to hit the origin as soon as possible. Therefore, he/she would like to choose , but this generates a cost. On the other hand, the second optimizer wants the Markov chain to remain positive as long as possible. Hence, he/she would prefer to choose , which however generates no costs. Both optimizers, and especially the second one, must also take into account the value of the constant .
Remark 1.
We could, in theory, assume that the parameter λ is negative. Then, it is mainly the first optimizer who would need to consider the value of λ. See, however, Remark 3.
The main difference between the current paper and the related ones found in the literature is the fact that, in our case, the final time is neither finite or infinite; it is rather a random variable.
The above problem is a particular homing problem, in which a stochastic process is controlled until a certain event occurs. This type of problem was introduced by Whittle ([6] p. 289) for n-dimensional diffusion processes. He also considered the case when we take the risk-sensitivity of the optimizer into account; see [7], as well as [8,9].
The author has written numerous papers on homing problems. In [10,11], these problems where extended to the case of discrete-time Markov chains, whereas in [12] the case of autoregressive processes was treated; see also [13].
In [10,11], the authors considered a problem related to the one defined above, but with only one optimizer. Thus, they treated a stochastic optimal control problem, whereas the problem in the current paper is a stochastic difference game.
To solve our problem, we will use dynamic programming. Let be the value function defined by
In the next section, the dynamic programming equation satisfied by the function will be derived.
2. Dynamic Programming
In theory, we must determine the optimal value of for . However, using dynamic programming, the problem is reduced to finding the optimal solution at the initial time only.
Indeed, we can write, making use of Bellman’s principle of optimality, that
We can now state the following proposition.
Proposition 1.
The value function satisfies the dynamic programming equation
The equation is subject to the boundary condition
Remark 2.
The usefulness of the value function is that it enables us to determine the optimal controls and .
Since , we deduce from Equation (7) that
Now, let be the random variable that corresponds to when . Using the well-known results on the gambler’s ruin problem (see, for instance, ([14] p. 349), we can state that
Hence, we would also have
Since the objective is to minimize the expected value of , we must conclude that the optimal solution is not .
Remark 3.
(i) We deduce from what precedes that we cannot choose a value of the parameter λ in the interval , otherwise we obtain an infinite expected reward by choosing .
(ii) If , then there is no penalty (or reward) for survival in the continuation region . The optimal solution is obviously . As will be seen below, the optimal value of is 1 for any value of .
(iii) If we define
then, when , we find that (see, again, ([14] p. 349))
so that
Therefore, we could take in that case.
Next, notice that and yield the same expected value of . However, the choice generates a cost of 1, while with a reward of 1 is obtained. Hence, taking is surely a better decision than choosing . Thus, we must determine whether the optimal solution is or .
Proposition 2.
We deduce from what precedes that the second optimizer should choose , independently of the value of .
Remark 4.
The optimal choice for will depend on the value of the parameter λ, which, as mentioned above, gives the penalty incurred for survival in the continuation region.
It follows from Proposition 2 that Equation (9) can be simplified to
Proposition 3.
The value function satisfies the non-linear third-order difference equation
for The boundary condition is
Proof.
3. Optimal Choice for
We must determine whether the first optimizer should take or . The control variable (as well as ) is actually a function of .
Suppose that we set . Then, denoting the function by , Equation (17) implies that
that we rewrite as follows:
where . The equation is valid for and is subject to the boundary condition
Making use of the mathematical software program Maple, we find that the solution of Equation (23) that satisfies the boundary conditions is
for , so that
for .
Remark 5.
(i) The function is real, even if it contains the imaginary constant i.
Next, let us denote the function by if we set . We then deduce from Equation (17) that the function satisfies the second-order difference equation
The unique solution that is such that is
Every time the value of changes, the (first) optimizer must make a new decision. It then follows from Equation (17) that we can express the value function in terms of and as in the following proposition.
Proposition 4.
The value function is given by
for .
To determine the value function, and hence the optimal value of (), we can compare the two expressions
and
That is, we can write that
Remark 6.
We must set when we compute the function (and ).
In the next section, we will present the results obtained with different values of the parameter to see the effect of this parameter on the optimal control .
4. Numerical Examples
Assume first that . Table 1 gives the value function , , , , and the optimal control for . We see that the optimal control is always , which could have been expected because the penalty for survival in the continuation region is not large enough to incite the first optimizer to use in order to leave C as rapidly as possible.
Next, we take . This case is rather special, because the function becomes . Again, ; see Table 2.
Finally, in Table 4 and the optimal control is , which is not surprising because the constant is large.
4.1. Critical Value of
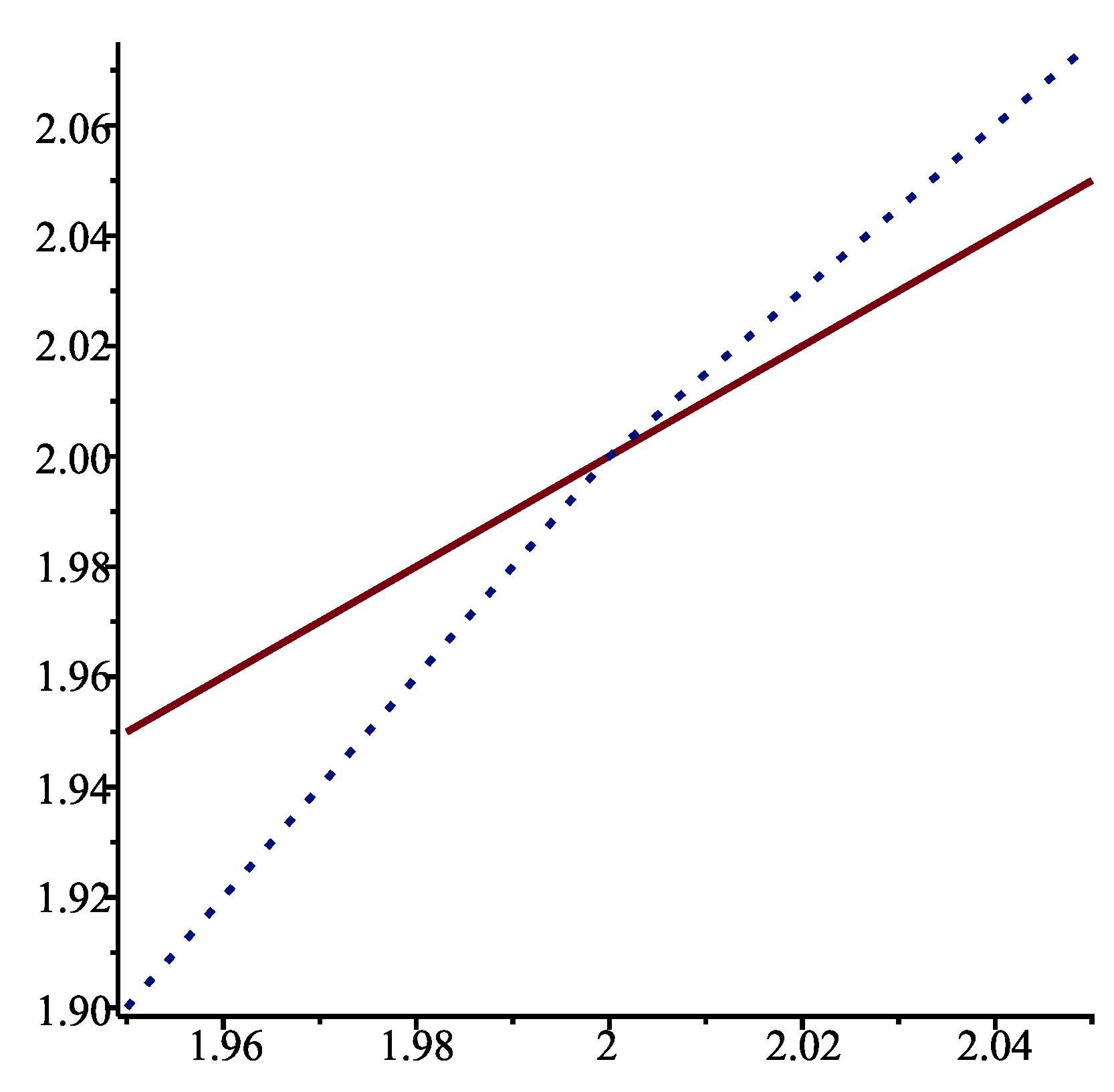
For a fixed x, we can determine the critical value of , that is, the value of for which . For instance, we see in Figure 1 that when . For , , while for .
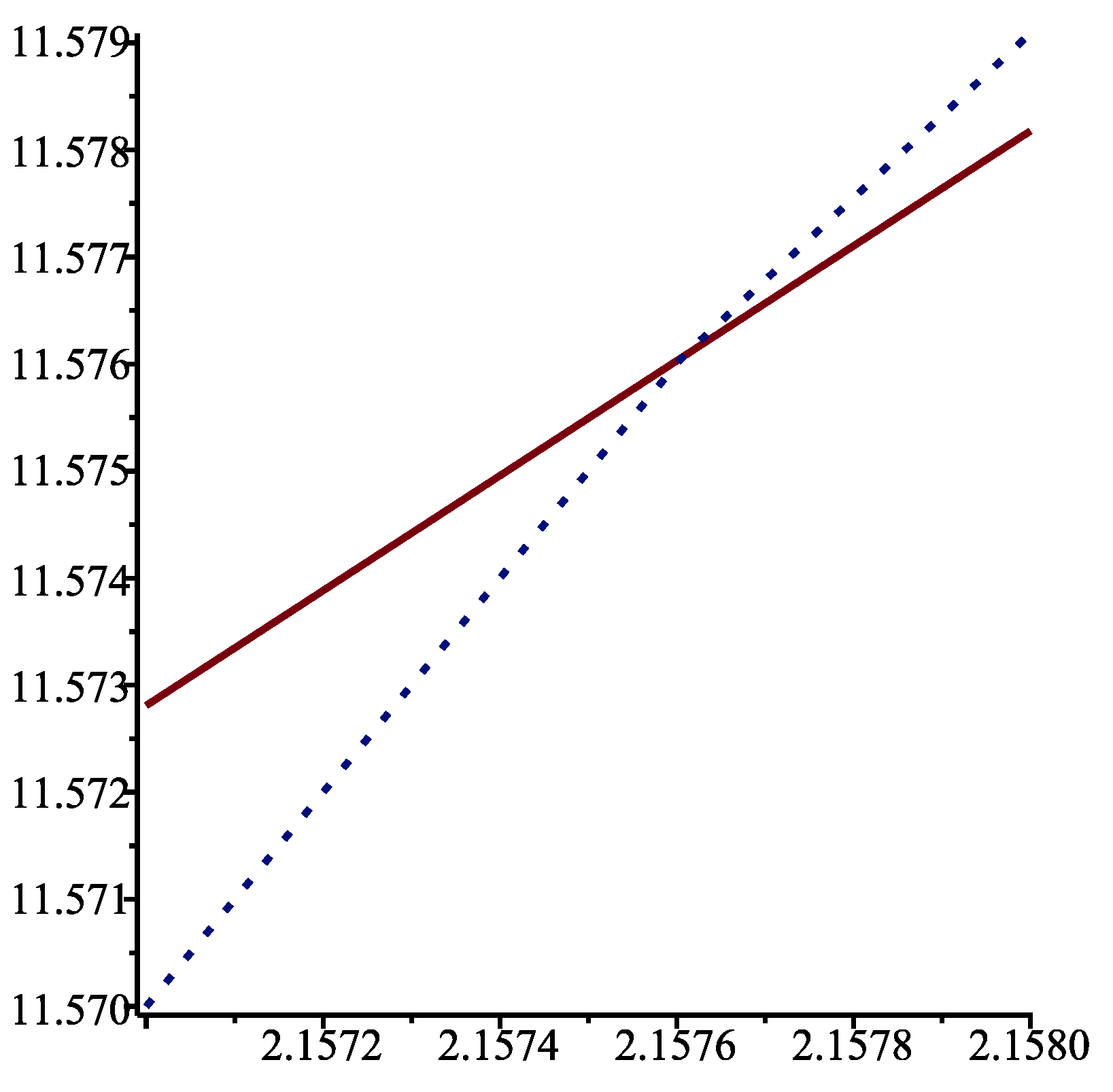
Similarly, and are both approximately equal to 11.576 when ; see Figure 2.
4.2. Solution of the Non-Linear Difference Equation
As we mentioned in Section 2, solving the non-linear third-order difference Equation (18), subject to the boundary condition (19), is not an easy task.
We can try to solve Equation (18) recursively. First, making use of the boundary condition (19), we can write that
It follows that
Because can take any real value, it is not obvious to decide which sign to choose in the above equation. If we look at the value of in Table 1, Table 2, Table 3 and Table 4, we see that we must in fact choose the minus sign, so that
Next, we could use the above expression for in Equation (18) to determine the value of , and so forth. It is clear that this technique is tedious. Moreover, without having computed the value of as we did above, determining the right sign to choose in the expression for that corresponds to the one in Equation (35) is not straightforward.
From what precedes, we may conclude that the method used in this paper to compute the value function explicitly is of interest in itself and could be used to solve boundary value problems for non-linear difference equations, if we can express the function of interest as a particular value function in a stochastic control problem.
To conclude, we will check that the values of the function given in Table 1 are such that Equation (18), together with the boundary condition (19), is indeed satisfied for when .
First, we saw in Equation (35) that is a solution of the equation if . Next, since is also equal to , we must have
which is indeed correct.
The value of in Table 1 is . We must check that
Again, the result is correct. We can proceed in the same way to check the remaining results. For , we obtain that
5. Conclusions
Homing problems are generally considered for diffusion processes. The author and Kounta [11] extended these problems to the discrete-time case. In [10], the author improved the results found in [11] by finding an explicit expression for the value function.
In the current paper, a homing problem with two optimizers has been defined and solved explicitly. The problem can be interpreted as a stochastic difference game, as one optimizer is trying to minimize the time spent by the controlled stochastic process in the continuation region C, while the second one seeks to maximize the survival time in C.
In Section 2, the equation satisfied by the value function has been derived. This equation is a non-linear third-order difference equation, which is obviously very difficult to solve explicitly.
The technique that we have used in the paper enables us to obtain an exact expression for the solution of a boundary value problem for a non-linear difference equation. This result is of interest in itself.
For the sake of simplicity, we have considered a symmetric random walk, and it has been assumed that the control variables can take only two values. We could of course generalize the results that have been presented in the paper. However, if there are many possible values for the control variables, obtaining an explicit solution to the homing problem considered can be quite tedious.
Funding
This research was supported by the Natural Sciences and Engineering Research Council of Canada. The author also wishes to thank the anonymous reviewers of this paper for their constructive comments.
Data Availability Statement
Not applicable.
Conflicts of Interest
The author declares no conflict of interest.
References
- Hämäläinen, R.P. Nash and Stackelberg solutions to general linear-quadratic two player difference games. I: Open-loop and feedback strategies. Kybernetika 1978, 14, 38–56. [Google Scholar]
- Reddy, P.V.; Zaccour, G. Feedback Nash equilibria in linear-quadratic difference games with constraints. IEEE Trans. Automat. Control 2017, 62, 590–604. [Google Scholar] [CrossRef]
- Lin, Y. Feedback Stackelberg strategies for the discrete-time mean-field stochastic systems in infinite horizon. J. Frank. Inst. 2019, 356, 5222–5239. [Google Scholar] [CrossRef]
- Liu, X.; Liu, R.; Li, Y. Infinite time linear quadratic Stackelberg game problem for unknown stochastic discrete-time systems via adaptive dynamic programming approach. Asian J. Control 2020, 2, 937–948. [Google Scholar] [CrossRef]
- Ju, P.; Li, X.; Lei, J.; Li, T. Optimal linear strategy for stochastic games with one-side control-sharing information. Int. J. Control 2022, 1–7. [Google Scholar] [CrossRef]
- Whittle, P. Optimization over Time; Wiley: Chichester, UK, 1982; Volume 1. [Google Scholar]
- Whittle, P. Risk-Sensitive Optimal Control; Wiley: Chichester, UK, 1990. [Google Scholar]
- Kuhn, J. The risk-sensitive homing problem. J. Appl. Probab. 1985, 22, 796–803. [Google Scholar] [CrossRef]
- Makasu, C. Risk-sensitive control for a class of homing problems. Automatica 2009, 45, 2454–2455. [Google Scholar] [CrossRef]
- Lefebvre, M. An explicit solution to a discrete-time stochastic optimal control problem. WSEAS Trans. Syst. 2023, 22, Art. #40. 368–371. [Google Scholar] [CrossRef]
- Lefebvre, M.; Kounta, M. Discrete homing problems. Arch. Control Sci. 2013, 23. [Google Scholar] [CrossRef]
- Lefebvre, M. The homing problem for autoregressive processes. IMA J. Math. Control Inform. 2022, 39, 322–344. [Google Scholar] [CrossRef]
- Kounta, M.; Dawson, N.J. Linear quadratic Gaussian homing for Markov processes with regime switching and applications to controlled population growth/decay. Methodol. Comput. Appl. Probab. 2021, 23, 1155–1172. [Google Scholar] [CrossRef]
- Feller, W. An Introduction to Probability Theory and its Applications; Wiley: New York, NY, USA, 1968; Volume I. [Google Scholar]
Figure 1.
Functions (solid line) and when .

Figure 2.
Functions (solid line) and when .


{kind=link}
{kind=link}
Table 1.
Functions , , , and , and optimal control for when .
| x | ||||||
|---|---|---|---|---|---|---|
| 1 | 0 | |||||
| 2 | 0 | 0 | ||||
| 3 | 0 | 0 | ||||
| 4 | 0 | |||||
| 5 | 0 | |||||
| 6 | 0 | |||||
| 7 | 0 | |||||
| 8 | 0 | |||||
| 9 | 0 | |||||
| 10 | 0 |
Table 2.
Functions , , , and , and optimal control for when .
| x | ||||||
|---|---|---|---|---|---|---|
| 1 | 0 | 1 | 0 | 1 | 0 | 0 |
| 2 | 0 | 0 | 1 | 0 | 0 | |
| 3 | 0 | 0 | 1 | 0 | 0 | |
| 4 | 0 | 0 | 1 | 0 | 0 | |
| 5 | 0 | 0 | 1 | 0 | 0 | |
| 6 | 0 | 0 | 1 | 0 | 0 | |
| 7 | 0 | 0 | 1 | 0 | 0 | |
| 8 | 0 | 0 | 1 | 0 | 0 | |
| 9 | 0 | 0 | 1 | 0 | 0 | |
| 10 | 0 | 0 | 1 | 0 | 0 |
Table 3.
Functions , , , and , and optimal control for when .
| x | ||||||
|---|---|---|---|---|---|---|
| 1 | 2 | 2 | 2 | 2 | 2 | or 0 |
| 2 | 2 | 3 | 2 | 3 | 2 | 0 |
| 3 | 3 | 4 | 3 | |||
| 4 | 4 | 4 | 4 | 0 | ||
| 5 | 5 | 6 | 5 | |||
| 6 | 6 | 6 | 6 | 0 | ||
| 7 | 7 | 8 | 7 | |||
| 8 | 8 | 8 | 8 | 0 | ||
| 9 | 9 | 10 | 9 | |||
| 10 | 10 | 10 | 10 | 0 |
Table 4.
Functions , , , and , and optimal control for when .
| x | ||||||
|---|---|---|---|---|---|---|
| 1 | 10 | 10 | 18 | 10 | 14 | |
| 2 | 15 | 15 | 18 | 15 | ||
| 3 | 36 | |||||
| 4 | 36 | |||||
| 5 | 54 | |||||
| 6 | 54 | |||||
| 7 | 72 | |||||
| 8 | 72 | |||||
| 9 | 90 | |||||
| 10 | 90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lefebvre, M. A Discrete-Time Homing Problem with Two Optimizers. Games 2023, 14, 68. https://doi.org/10.3390/g14060068
AMA Style
Lefebvre M. A Discrete-Time Homing Problem with Two Optimizers. Games. 2023; 14(6):68. https://doi.org/10.3390/g14060068
Chicago/Turabian StyleLefebvre, Mario. 2023. "A Discrete-Time Homing Problem with Two Optimizers" Games 14, no. 6: 68. https://doi.org/10.3390/g14060068
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.