Improvement of GNSS Carrier Phase Accuracy Using MEMS Accelerometer-Aided Phase-Locked Loops for Earthquake Monitoring

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Characteristics of Strong Earthquake Signal
3. Measurement Errors of PLLs
3.1. Stand-Alone PLLs
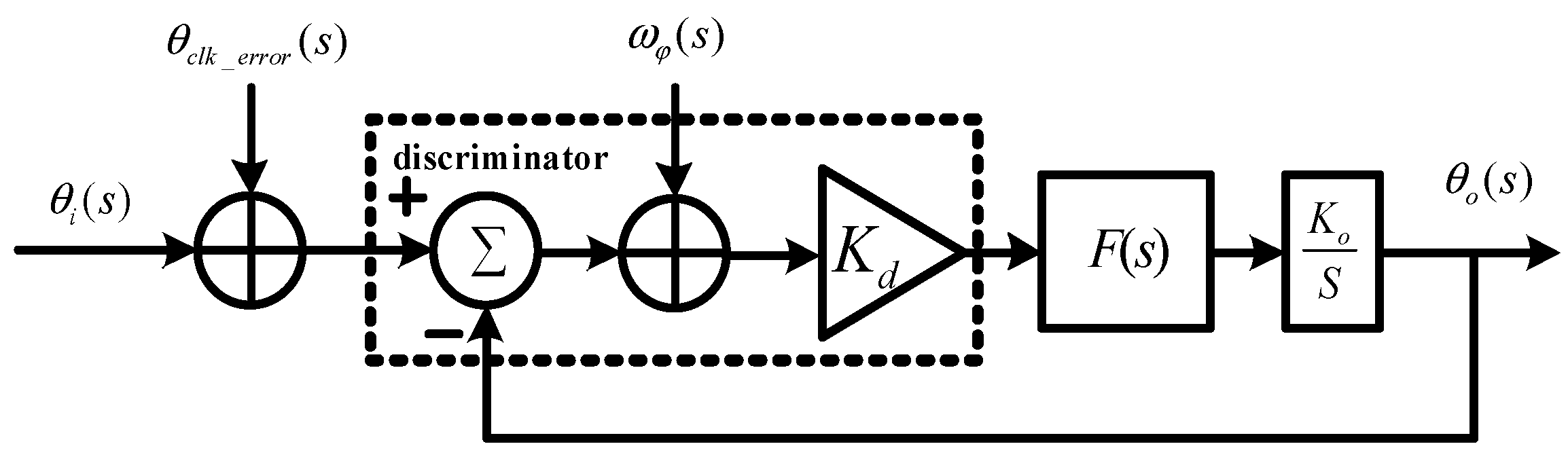
3.2. MEMS Accelerometer-Aided PLLs
4. Carrier Phase Accuracy Tests
4.1. Tests and Analysis Based on Signal Simulator
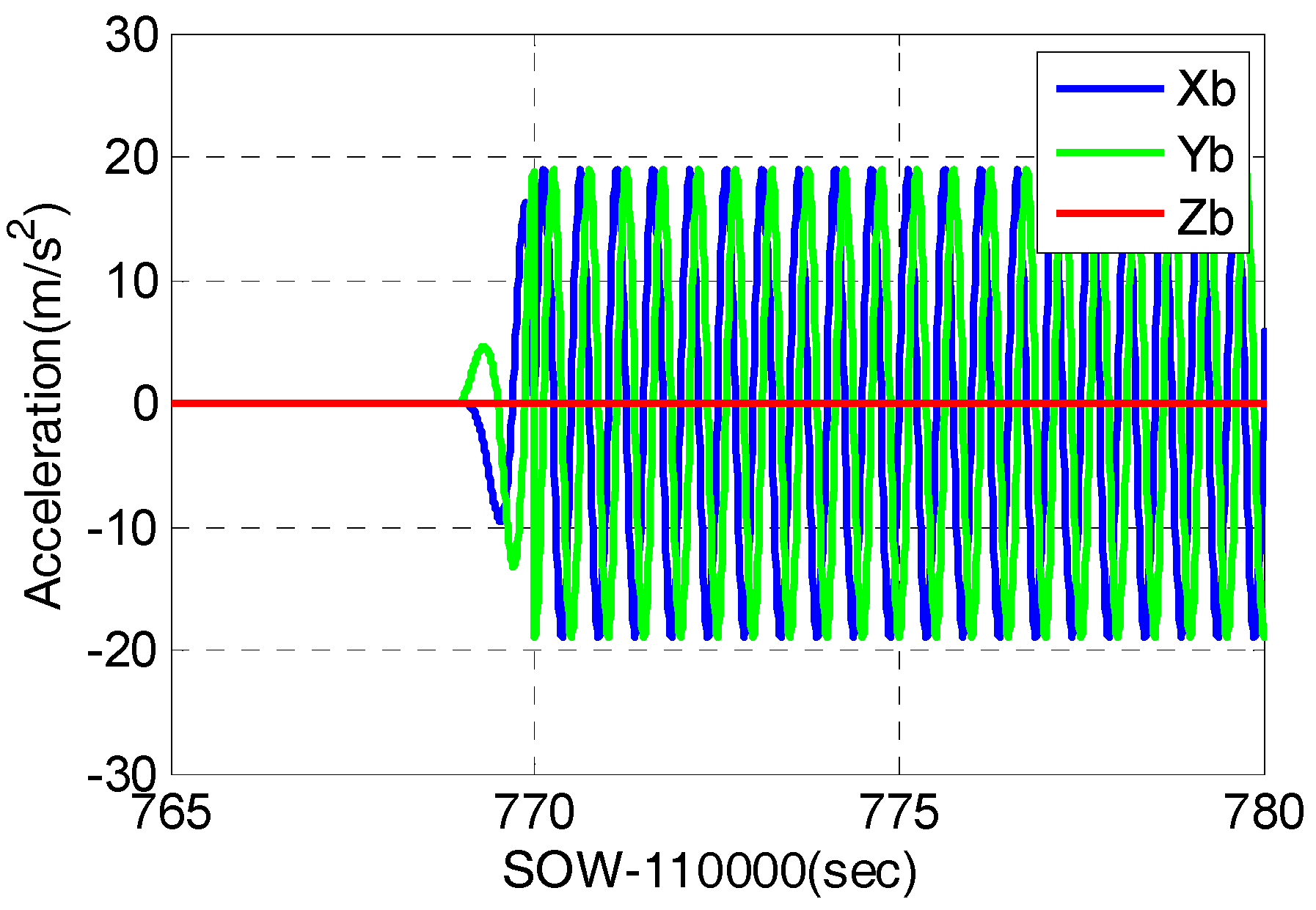
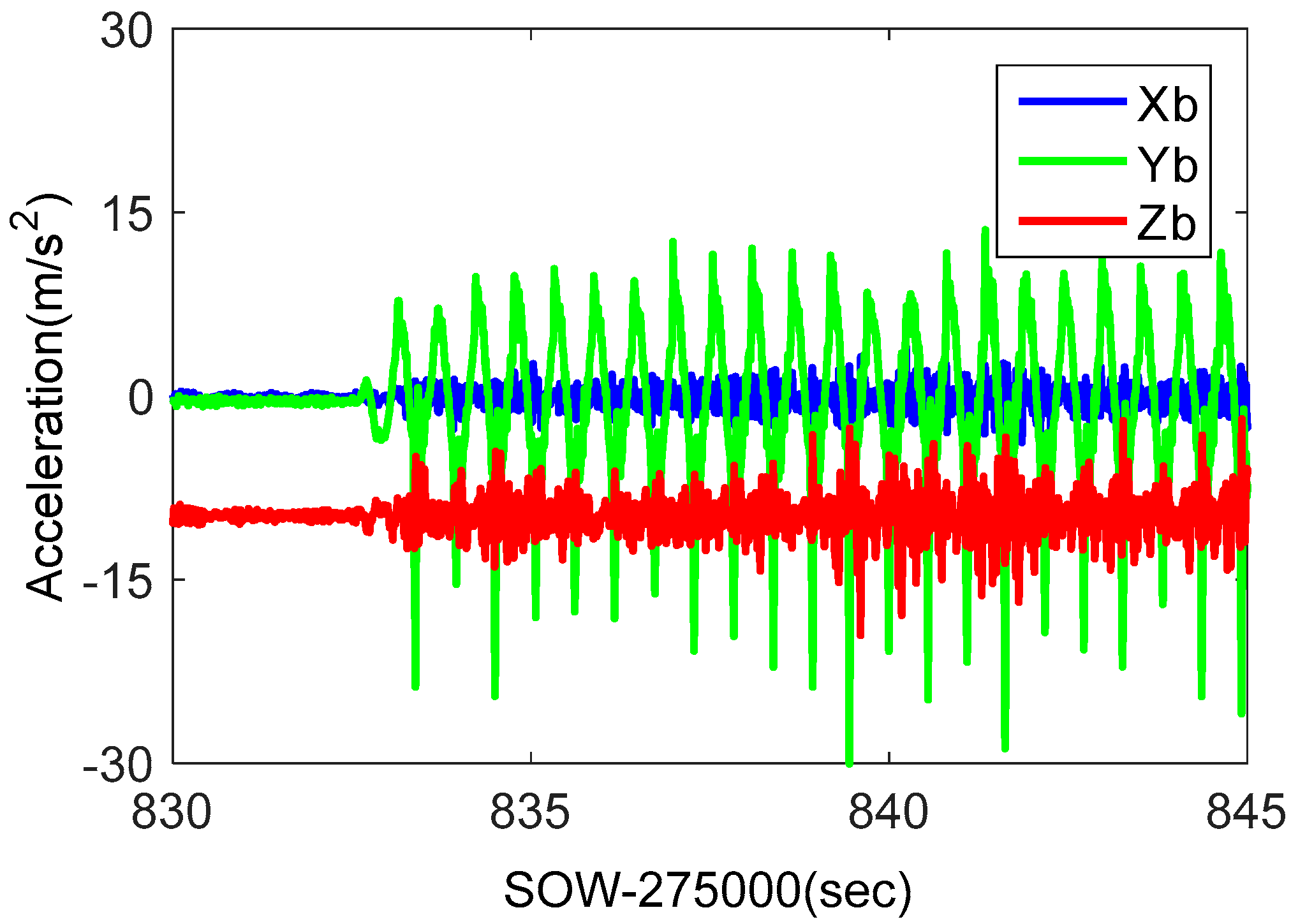
4.2. Tests and Analysis Based on a Shake Table
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nikolaidis, R.; Bock, Y.; de Jonge, P.J.; Shearer, P.; Agnew, D.C.; Van Domselaar, M. Seismic wave observations with the global positioning system. J. Geophys. Res. 2001, 106, 897–916. [Google Scholar] [CrossRef]
- Larson, K.; Bodin, P.; Gomberg, J. Using 1-Hz GPS data to measure deformations caused by the Denali faultearthquake. Science 2003, 300, 1421–1424. [Google Scholar] [CrossRef] [PubMed]
- Bock, Y.; Prawirodirdjo, L.; Melbourne, T.I. Detection of arbitrarily large dynamic ground motions with a dense high-rate GPS network. Geophys. Res. Lett. 2004, 31, L06604. [Google Scholar] [CrossRef]
- Larson, K. GPS seismology. J. Geod. 2009, 83, 227–233. [Google Scholar] [CrossRef]
- Fanis, M.; Stathis, S. PLL bandwidth and noise in 100 Hz GPS measurements. GPS Solut. 2015, 19, 173–185. [Google Scholar] [CrossRef]
- Wang, G.; Blume, F.; Meertens, C.; Ibanez, P.; Schulze, M. Performance of high-rate kinematic GPS during strong shaking: Observations from shake table tests and the 2010 Chile earthquake. J. Geod. Sci. 2012, 2, 15–30. [Google Scholar] [CrossRef]
- Takuji, E.; Teruyuki, K. Dynamic characteristics of very-high-rate GPS observations for seismology. Earth Planets Space 2012, 64, 369–377. [Google Scholar]
- Zhang, P.; Zhang, T.; Zhang, H.; Niu, X. Analysis of accuracy of GNSS receiver for strong seismic waves. J. Geod. Geodyn. 2016, 36, 278–282. [Google Scholar]
- Geng, J.; Bock, Y.; Melgar, D.; Crowell, B.W.; Haase, S. A new seismogeodetic approach applied to GPS and accelerometer observations of the 2012 Brawly seismic swarm: Implications for earthquake early warning. Geochem. Geophys. Geosyst. 2013, 14, 2124–2142. [Google Scholar] [CrossRef]
- Bock, Y.; Melgar, D.; Crowell, B.W. Real-timestrong-motion broadband displacements from collocated GPS and accelerometers. Bull. Seismol. Soc. Am. 2011, 101, 2904–2925. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Zhang, Y.; Wang, R.; Klotz, J.; Wicket, J. High rate coseismic displacements from tightly-integrated processing of raw GPS and accelerometer data. Geophys. J. Int. 2013, 195, 612–624. [Google Scholar] [CrossRef]
- Tu, R.; Zhang, Q.; Wang, L.; Liu, Z.; Huang, G. An improved method for tight integration of GPS and strong-motion records: Complementary advantages. Adv. Space Res. 2015, 56, 2335–2344. [Google Scholar] [CrossRef]
- Saunders, J.K.; Goldberg, D.E.; Haase, J.S.; Bock, Y.; Offield, D.G. Seismogeodesy using GPS and low-cost MEMS accelerometers: Perspectives for earthquake early warning and rapid response. Bull. Seismol. Soc. Am. 2016, 106, 2469. [Google Scholar] [CrossRef]
- Eling, C.; Klingbeil, L.; Kuhlmann, H. Real-time single-frequency GPS/MEMS-IMU attitude determination of lightweight UAVs. Sensors 2015, 15, 26212–26235. [Google Scholar] [CrossRef] [PubMed]
- Caciotta, M.; Leccese, F.; Pisa, S.; Piuzzi, E. A Voltage Controlled Oscillator for Obtaining a Frequency Reference Constantly Locked to L1 GPS Carrier for Power Quality Assessment Applications. In Proceedings of the 16th IMEKO TC4 Symposium Exploring New Frontiers of Instrumentation and Methods for Electrical and Electronic Measurements, Florence, Italy, 22–24 September 2008; ISBN CD 978-88-903149-3-3. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications, 2nd ed.; Artech House: Boston, MA, USA, 2006; pp. 186–187. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance, 2nd ed.; Ganag-Jamuna Press: Lincoln, MA, USA, 2006; pp. 1–20. [Google Scholar]
- Jwo, D.-J. Optimization and sensitivity analysis of GPS receiver tracking loops in dynamic environments. IEE Proc. Radar Sonar Navig. 2001, 148, 241–250. [Google Scholar] [CrossRef]
- Faisal, A.K.; Andrew, G.D.; Chris, R. Projected Bandwidth Loop—An Alternative to Adaptive Bandwidth Loops with Reduced Complexity. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; [Google Scholar] [CrossRef]
- Razavi, A.; Gebre-Egziabher, D.; Akos, D.M. Carrier loop architectures for tracking weak GPS signals. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 697–710. [Google Scholar] [CrossRef]
- Clare, A.; Lin, T.; Lachapelle, G. Effect of GNSS receiver carrier phase tracking loops on earthquake monitoring performance. Adv. Space Res. 2016, 59, 2740–2749. [Google Scholar] [CrossRef]
- Gautier, J.D.; Parkinson, B.W. Using the GPS/INS Generalized Evaluation Tool (GIGET) for the Comparison of Loosely Coupled, Tightly Coupled and Ultra-Tightly Coupled Integrated Navigation Systems. In Proceedings of the 59th annual meeting of the institute of navigation and CIGTF 22nd guidance test symposium AM2003, Albuquerque, NM, USA, 23–25 June 2003; Institute of Navigation: Albuquerque, NM, USA, 2003; pp. 65–76. [Google Scholar]
- Tsujii, T.; Fujiwara, T.; Kubota, T.; Yukihiro Kubo, Y. Testing of an ultra-tightly coupled GPS/INS under strong ionospheric scintillation. Trans. Inst. Syst. Control Inf. Eng. 2014, 27, 476–484. [Google Scholar] [CrossRef]
- Clare, A. Effect of GNSS Receiver Signal Tracking Parameters on Earthquake Monitoring Performance. Master’s Thesis, University of Calgary, Calgary, AB, Canada, 2016. [Google Scholar]
- Seismosoft Ltd. SeismoSignal. Available online: http://www.seismosoft.com/products (accessed on 15 May 2017).
- Irsigler, M.; Eissfeller, B. PLL tracking performance in the presence of oscillator phase noise. GPS Solut. 2002, 5, 45–57. [Google Scholar] [CrossRef]
- Alban, S.; Akos, D.; Rock, S. Performance analysis and architectures for INS-aided GPS trackingloops. In Proceedings of the Institute of Navigation National Technical Meeting 2003, Anaheim, CA, USA, 22–24 January 2003. [Google Scholar]
- Zhang, T.; Ban, Y.; Niu, X.; Guo, W.; Liu, J. Improving the design of MEMS INS-aided PLLs for GNSS carrier phase measurement under high dynamics. Micromachines 2017, 8, 135. [Google Scholar] [CrossRef]
- Niu, X.; Ban, Y.; Zhang, Q.; Zhang, T.; Zhang, P.; Liu, J. Quantitative analysis to the impacts of IMU quality in GPS/INS deep integration. Micromachines 2015, 6, 1082–1099. [Google Scholar] [CrossRef]
- Sensonor. STIM300. Available online: http://www.sensonor.com/gyro-products/inertial-measurement-units/stim300.aspx (accessed on 15 March 2017).
- Zhang, T.; Zhang, H.; Lin, T.; Yan, K.; Niu, X. Modeling and verifying the impact of time delay on INS-aided GNSS PLLs. GPS Solut. 2016, 20, 725–736. [Google Scholar] [CrossRef]



















© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Liu, H.; Chen, Q.; Zhang, H.; Niu, X. Improvement of GNSS Carrier Phase Accuracy Using MEMS Accelerometer-Aided Phase-Locked Loops for Earthquake Monitoring. Micromachines 2017, 8, 191. https://doi.org/10.3390/mi8060191
Zhang T, Liu H, Chen Q, Zhang H, Niu X. Improvement of GNSS Carrier Phase Accuracy Using MEMS Accelerometer-Aided Phase-Locked Loops for Earthquake Monitoring. Micromachines. 2017; 8(6):191. https://doi.org/10.3390/mi8060191
Chicago/Turabian StyleZhang, Tisheng, Hengrong Liu, Qijin Chen, Hongping Zhang, and Xiaoji Niu. 2017. "Improvement of GNSS Carrier Phase Accuracy Using MEMS Accelerometer-Aided Phase-Locked Loops for Earthquake Monitoring" Micromachines 8, no. 6: 191. https://doi.org/10.3390/mi8060191