Modeling of Microdevices for SAW-Based Acoustophoresis — A Study of Boundary Conditions



Abstract
:
1. Introduction
2. Results: Comparing the Full and Reduced 2D Models
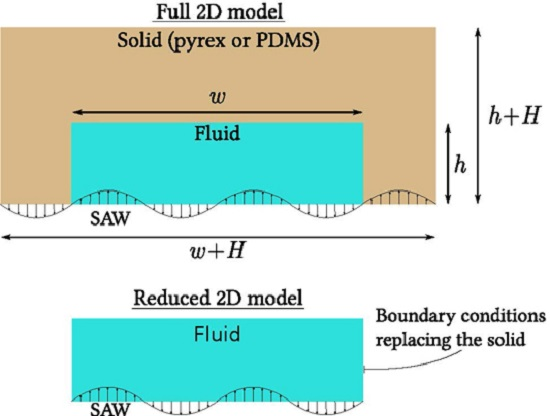
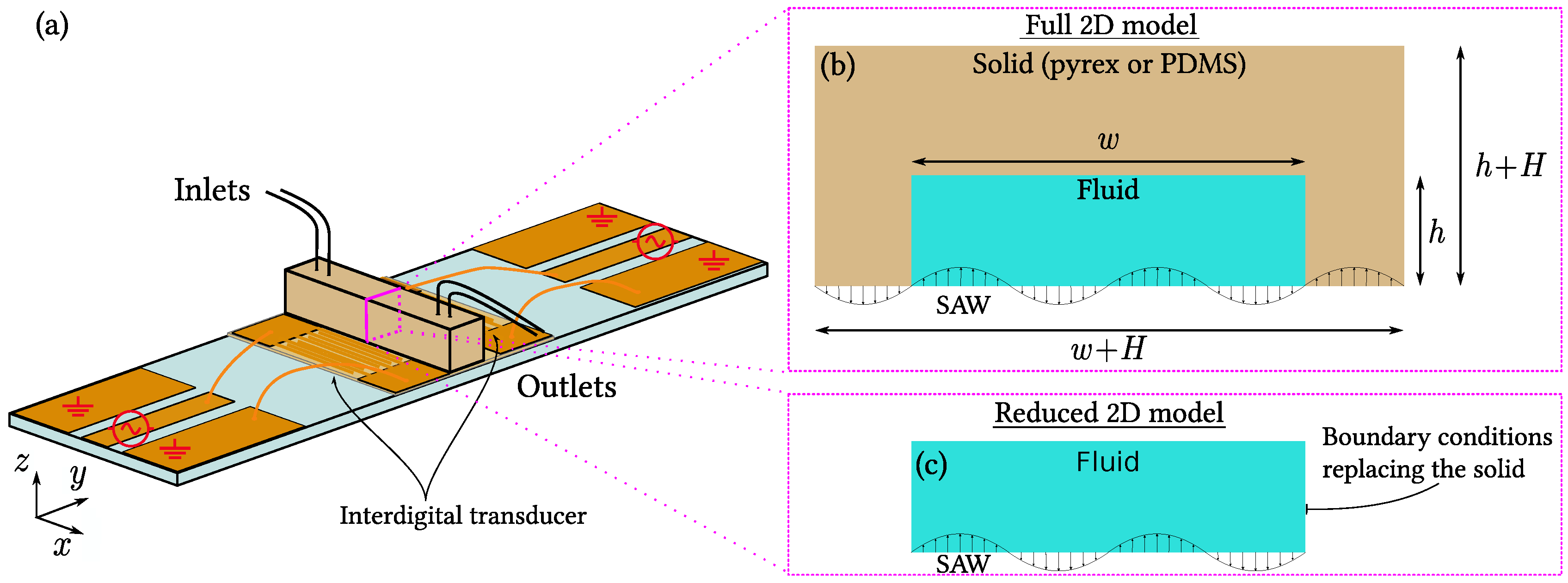
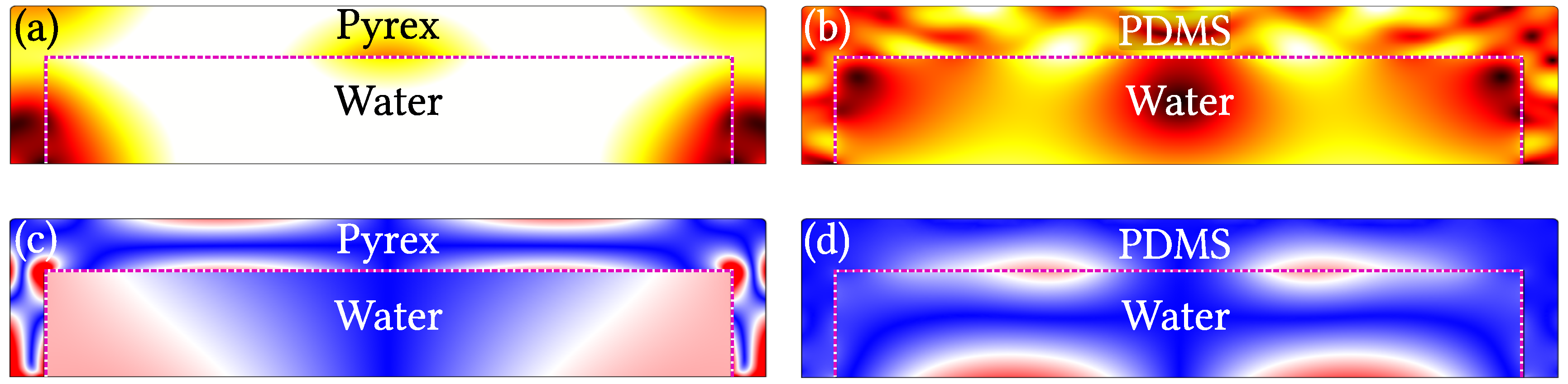
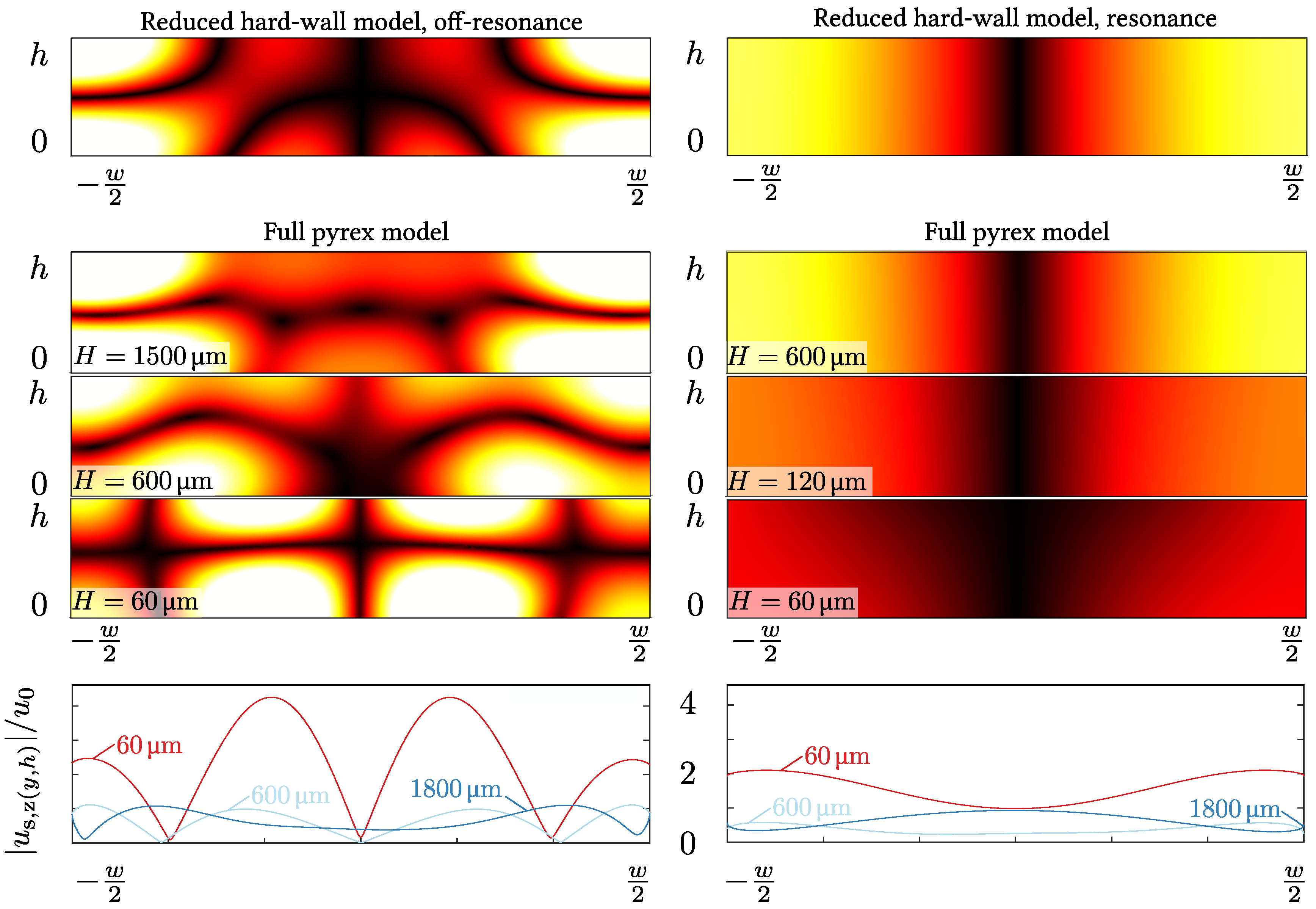
2.1. Pyrex Devices: Full Model and Reduced Hard-Wall Model
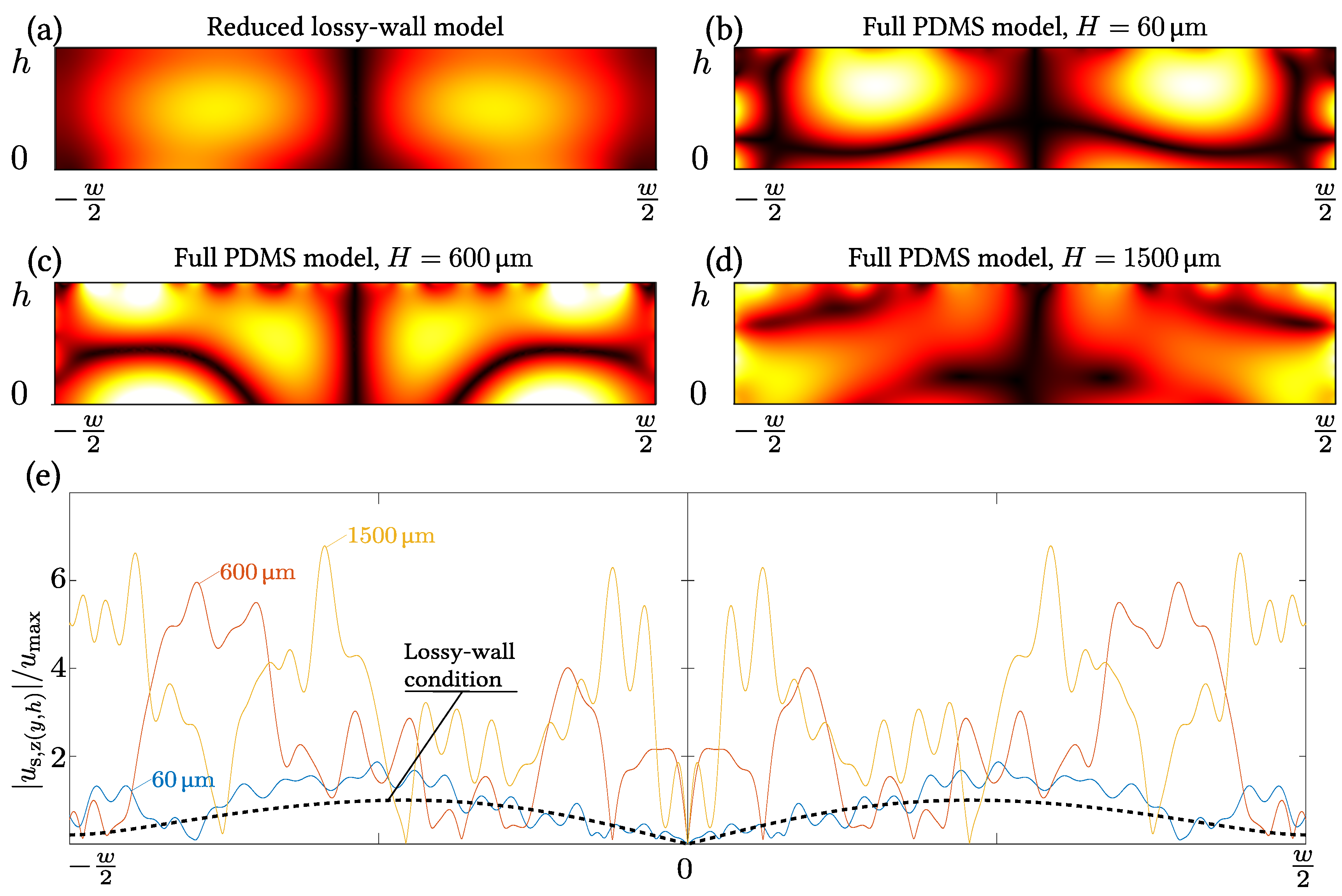
2.2. PDMS Devices: Full Model and Reduced Lossy-Wall Model
3. Discussion
3.1. Physical Limitations of the Hard-Wall Condition
3.2. Acoustic Eigenmodes
3.3. Physical Limitations of the Lossy-Wall Condition
3.4. Modeling PDMS as a Linear Elastic
4. Materials and Methods
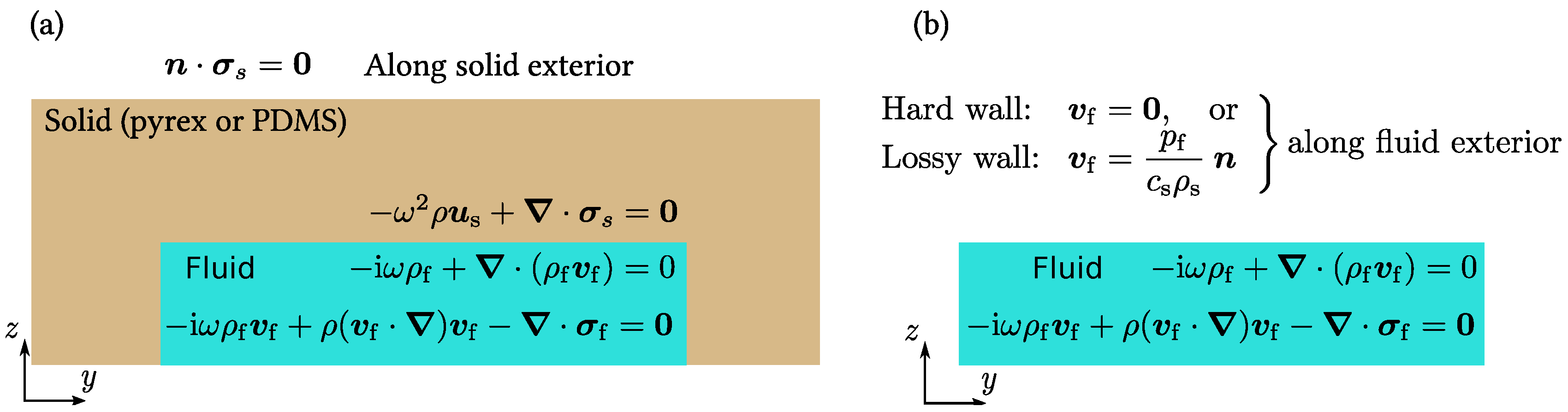
4.1. Governing Equations
4.2. Boundary Conditions
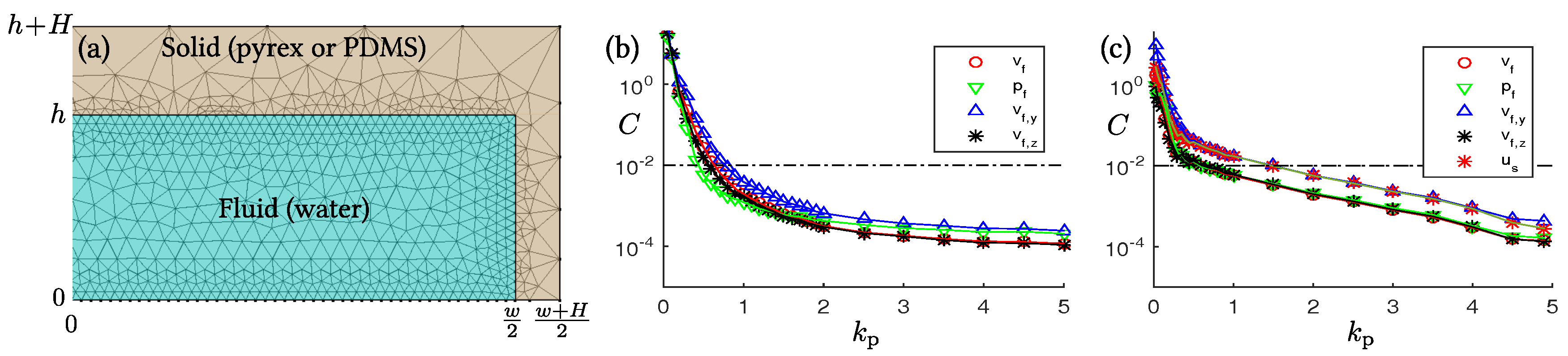
4.3. Numerical Implementation and Validation
5. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| Pyrex | Borosilicate glass |
| PDMS | Polydimethylsiloxane |
| SAW | Surface acoustic wave |
| BAW | Bulk acoustic wave |
| IDT | Interdigital transducer |
References
- Petersson, F.; Åberg, L.; Sward-Nilsson, A.M.; Laurell, T. Free flow acoustophoresis: Microfluidic-based mode of particle and cell separation. Anal. Chem. 2007, 79, 5117–5123. [Google Scholar] [CrossRef] [PubMed]
- Amini, H.; Lee, W.; Di Carlo, D. Inertial microfluidic physics. Lab Chip 2014, 14, 2739–2761. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.; Huang, H.; Stratton, Z.; Huang, Y.; Huang, T.J. Continuous particle separation in a microfluidic channel via standing surface acoustic waves (SSAW). Lab Chip 2009, 9, 3354–3359. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.; Yazdi, S.; Lin, S.C.S.; Ding, X.; Chiang, I.K.; Sharp, K.; Huang, T.J. Three-dimensional continuous particle focusing in a microfluidic channel via standing surface acoustic waves (SSAW). Lab Chip 2011, 11, 2319–2324. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Nawaz, A.A.; Zhao, Y.; Huang, P.H.; McCoy, J.P.; Levine, S.J.; Wang, L.; Huang, T.J. Standing surface acoustic wave (SSAW)-based microfluidic cytometer. Lab Chip 2014, 14, 916–923. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.; Shao, H.; Weissleder, R.; Lee, H. Acoustic purification of extracellular microvesicles. ACS Nano 2015, 9, 2321–2327. [Google Scholar] [CrossRef] [PubMed]
- Liga, A.; Vliegenthart, A.D.B.; Oosthuyzen, W.; Dear, J.W.; Kersaudy-Kerhoas, M. Exosome isolation: A microfluidic road-map. Lab Chip 2015, 15, 2388–2394. [Google Scholar] [CrossRef] [PubMed]
- Pamme, N. Continuous flow separations in microfluidic devices. Lab Chip 2007, 7, 1644. [Google Scholar] [CrossRef] [PubMed]
- Sethu, P.; Sin, A.; Toner, M. Microfluidic diffusive filter for apheresis (leukapheresis). Lab Chip 2006, 6, 83–89. [Google Scholar] [CrossRef] [PubMed]
- Huh, D.; Bahng, J.H.; Ling, Y.; Wei, H.H.; Kripfgans, O.D.; Fowlkes, J.B.; Grotberg, J.B.; Takayama, S. Gravity-driven microfluidic particle sorting device with hydrodynamic separation amplification. Anal. Chem. 2007, 79, 1369–1376. [Google Scholar] [CrossRef] [PubMed]
- Sugiyama, D.; Teshima, Y.; Yamanaka, K.; Briones-Nagata, M.P.; Maeki, M.; Yamashita, K.; Takahashi, M.; Miyazaki, M. Simple density-based particle separation in a microfluidic chip. Anal. Methods 2014, 6, 308–311. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, S.; Yuan, D.; Alici, G.; Nguyen, N.T.; Warkiani, M.E.; Li, W. Fundamentals and applications of inertial microfluidics: A review. Lab Chip 2016, 16, 10–34. [Google Scholar] [CrossRef] [PubMed]
- Pamme, N.; Wilhelm, C. Continuous sorting of magnetic cells via on-chip free-flow magnetophoresis. Lab Chip 2006, 6, 974–980. [Google Scholar] [CrossRef] [PubMed]
- Guldiken, R.; Jo, M.C.; Gallant, N.D.; Demirci, U.; Zhe, J. Sheathless size-based acoustic particle separation. Sensors 2012, 12, 905–922. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Travagliati, M.; Shilton, R.; Beltram, F.; Cecchini, M. Fabrication, Operation and flow visualization in surface-acoustic-wave-driven acoustic-counterflow microfluidics. J. Vis. Exp. 2013, 78, e50524. [Google Scholar] [CrossRef] [PubMed]
- Guo, F.; Mao, Z.; Chen, Y.; Xie, Z.; Lata, J.P.; Li, P.; Ren, L.; Liu, J.; Yang, J.; Dao, M.; et al. Three-dimensional manipulation of single cells using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2016, 113, 1522–1527. [Google Scholar] [CrossRef] [PubMed]
- Bruus, H.; Dual, J.; Hawkes, J.; Hill, M.; Laurell, T.; Nilsson, J.; Radel, S.; Sadhal, S.; Wiklund, M. Forthcoming lab on a chip tutorial series on acoustofluidics: Acoustofluidics-exploiting ultrasonic standing wave forces and acoustic streaming in microfluidic systems for cell and particle manipulation. Lab Chip 2011, 11, 3579–3580. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Evander, M.; Gidlof, O.; Olde, B.; Erlinge, D.; Laurell, T. Non-contact acoustic capture of microparticles from small plasma volumes. Lab Chip 2015, 15, 2588–2596. [Google Scholar] [CrossRef] [PubMed]
- Wiklund, M. Acoustofluidics 12: Biocompatibility and cell viability in microfluidic acoustic resonators. Lab Chip 2012, 12, 2018–2028. [Google Scholar] [CrossRef] [PubMed]
- Collins, D.J.; Morahan, B.; Garcia-Bustos, J.; Doerig, C.; Plebanski, M.; Neild, A. Two-dimensional single-cell patterning with one cell per well driven by surface acoustic waves. Nat. Commun. 2015, 6, 8686. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, D.; Ozcelik, A.; Bojanala, N.; Nama, N.; Upadhyay, A.; Chen, Y.; Hanna-Rose, W.; Huang, T.J. Rotational manipulation of single cells and organisms using acoustic waves. Nat. Commun. 2016, 7, 11085. [Google Scholar] [CrossRef] [PubMed]
- Augustsson, P.; Karlsen, J.T.; Su, H.W.; Bruus, H.; Voldman, J. Iso-acoustic focusing of cells for size-insensitive acousto-mechanical phenotyping. Nat. Commun. 2016, 7, 11556. [Google Scholar] [CrossRef] [PubMed]
- Hammarström, B.; Laurell, T.; Nilsson, J. Seed particle enabled acoustic trapping of bacteria and nanoparticles in continuous flow systems. Lab Chip 2012, 12, 4296–4304. [Google Scholar] [CrossRef] [PubMed]
- Carugo, D.; Octon, T.; Messaoudi, W.; Fisher, A.L.; Carboni, M.; Harris, N.R.; Hill, M.; Glynne-Jones, P. A thin-reflector microfluidic resonator for continuous-flow concentration of microorganisms: A new approach to water quality analysis using acoustofluidics. Lab Chip 2014, 14, 3830–3842. [Google Scholar] [CrossRef] [PubMed]
- Sitters, G.; Kamsma, D.; Thalhammer, G.; Ritsch-Marte, M.; Peterman, E.J.G.; Wuite, G.J.L. Acoustic force spectroscopy. Nat. Meth. 2015, 12, 47–50. [Google Scholar] [CrossRef] [PubMed]
- Augustsson, P.; Magnusson, C.; Nordin, M.; Lilja, H.; Laurell, T. Microfluidic, label-Free enrichment of prostate cancer cells in blood based on acoustophoresis. Anal. Chem. 2012, 84, 7954–7962. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Mao, Z.; Peng, Z.; Zhou, L.; Chen, Y.; Huang, P.H.; Truica, C.I.; Drabick, J.J.; El-Deiry, W.S.; Dao, M.; et al. Acoustic separation of circulating tumor cells. Proc. Natl. Acad. Sci. USA 2015, 112, 4970–4975. [Google Scholar] [CrossRef] [PubMed]
- Hammarström, B.; Nilson, B.; Laurell, T.; Nilsson, J.; Ekström, S. Acoustic trapping for bacteria identification in positive blood cultures with MALDI-TOF MS. Anal. Chem. 2014, 86, 10560–10567. [Google Scholar] [CrossRef] [PubMed]
- Muller, P.B.; Barnkob, R.; Jensen, M.J.H.; Bruus, H. A numerical study of microparticle acoustophoresis driven by acoustic radiation forces and streaming-induced drag forces. Lab Chip 2012, 12, 4617–4627. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leibacher, I.; Schatzer, S.; Dual, J. Impedance matched channel walls in acoustofluidic systems. Lab Chip 2014, 14, 463–470. [Google Scholar] [CrossRef] [PubMed]
- Muller, P.B.; Bruus, H. Theoretical study of time-dependent, ultrasound-induced acoustic streaming in microchannels. Phys. Rev. E 2015, 92, 063018. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arruda, E.M.; Boyce, M.C. A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef]
- Yu, Y.S.; Zhao, Y.P. Deformation of PDMS membrane and microcantilever by a water droplet: Comparison between Mooney–Rivlin and linear elastic constitutive models. J. Colloid Interface Sci. 2009, 332, 467–476. [Google Scholar] [CrossRef] [PubMed]
- Bourbaba, H.; achaiba, C.B.; Mohamed, B. Mechanical behavior of polymeric membrane: Comparison between PDMS and PMMA for micro fluidic application. Energy Procedia 2013, 36, 231–237. [Google Scholar] [CrossRef]
- Darinskii, A.N.; Weihnacht, M.; Schmidt, H. Computation of the pressure field generated by surface acoustic waves in microchannels. Lab Chip 2016, 16, 2701–2709. [Google Scholar] [CrossRef] [PubMed]
- Nama, N.; Barnkob, R.; Mao, Z.; Kähler, C.J.; Costanzo, F.; Huang, T.J. Numerical study of acoustophoretic motion of particles in a PDMS microchannel driven by surface acoustic waves. Lab Chip 2015, 15, 2700–2709. [Google Scholar] [CrossRef] [PubMed]
- Mao, Z.; Xie, Y.; Guo, F.; Ren, L.; Huang, P.H.; Chen, Y.; Rufo, J.; Costanzo, F.; Huang, T.J. Experimental and numerical studies on standing surface acoustic wave microfluidics. Lab Chip 2016, 16, 515–524. [Google Scholar] [CrossRef] [PubMed]
- Bruus, H. Acoustofluidics 2: Perturbation theory and ultrasound resonance modes. Lab Chip 2012, 12, 20–28. [Google Scholar] [CrossRef] [PubMed]
- Weis, R.; Gaylord, T. Lithium niobate: Summary of physical properties and crystal structure. Appl. Phys. A 1985, 37, 191–203. [Google Scholar] [CrossRef]
- Narottam, P.; Bansal, N.P.; Bansal, R.H.D. Handbook of Glass Properties; Elsevier LTD: Amsterdam, The Netherlands, 1986. [Google Scholar]
- Hahn, P.; Dual, J. A numerically efficient damping model for acoustic resonances in microfluidic cavities. Phys. Fluids 2015, 27, 062005. [Google Scholar] [CrossRef]
- Madsen, E.L. Ultrasonic shear wave properties of soft tissues and tissuelike materials. J. Acoust. Soc. Am. 1983, 74, 1346–1355. [Google Scholar] [CrossRef] [PubMed]
- Zell, K.; Sperl, J.I.; Vogel, M.W.; Niessner, R.; Haisch, C. Acoustical properties of selected tissue phantom materials for ultrasound imaging. Phys. Med. Biol. 2007, 52, N475. [Google Scholar] [CrossRef] [PubMed]
- Muller, P.B.; Bruus, H. Numerical study of thermoviscous effects in ultrasound-induced acoustic streaming in microchannels. Phys. Rev. E 2014, 90, 043016. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.H.; Song, J.; Choi, W.M.; Kim, H.S.; Kim, R.H.; Liu, Z.; Huang, Y.Y.; Hwang, K.C.; Zhang, Y.W.; Rogers, J.A. Materials and noncoplanar mesh designs for integrated circuits with linear elastic responses to extreme mechanical deformations. Proc. Natl. Acad. Sci. USA 2008, 105, 18675–18680. [Google Scholar] [CrossRef] [PubMed]
- Schneider, F.; Fellner, T.; Wilde, J.; Wallrabe, U. Mechanical properties of silicones for MEMS. J. Micromech. Microeng. 2008, 18, 065008. [Google Scholar] [CrossRef]
- Hohne, D.N.; Younger, J.G.; Solomon, M.J. Flexible microfluidic device for mechanical property characterization of soft viscoelastic solids Such as bacterial biofilms. Langmuir 2009, 25, 7743–7751. [Google Scholar] [CrossRef] [PubMed]
- Still, T.; Oudich, M.; Auerhammer, G.K.; Vlassopoulos, D.; Djafari-Rouhani, B.; Fytas, G.; Sheng, P. Soft silicone rubber in phononic structures: Correct elastic moduli. Phys. Rev. B 2013, 88, 094102. [Google Scholar] [CrossRef]
- Johnston, I.D.; McCluskey, D.K.; Tan, C.K.L.; Tracey, M.C. Mechanical characterization of bulk Sylgard 184 for microfluidics and microengineering. J. Micromech. Microeng. 2014, 24, 035017. [Google Scholar] [CrossRef]
- Lin, I.K.; Ou, K.S.; Liao, Y.M.; Liu, Y.; Chen, K.S.; Zhang, X. Viscoelastic characterization and modeling of polymer transducers for biological applications. J. Microelectromechan. Syst. 2009, 18, 1087–1099. [Google Scholar]
- COMSOL Multiphysics, Version 5.2. Available online: http://www.comsol.com (accessed on 25 September 2015).
- Köster, D. Numerical simulation of acoustic streaming on surface acoustic wave-driven biochips. SIAM J. Sci. Comput. 2007, 29, 2352–2380. [Google Scholar] [CrossRef]
- Muller, P.B.; Rossi, M.; Marin, A.G.; Barnkob, R.; Augustsson, P.; Laurell, T.; Kähler, C.J.; Bruus, H. Ultrasound-induced acoustophoretic motion of microparticles in three dimensions. Phys. Rev. E 2013, 88, 023006. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ha, B.H.; Lee, K.S.; Destgeer, G.; Park, J.; Choung, J.S.; Jung, J.H.; Shin, J.H.; Sung, H.J. Acoustothermal heating of polydimethylsiloxane microfluidic system. Sci. Rep. 2015, 5, 11851. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MHz | MHz | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| m) | H (m) | m) | H (m) | ||||||
| 60 | 600 | 1500 | 60 | 600 | 1500 | ||||
| 600 | 0.100 | 1.000 | 2.500 | 600 | 0.100 | 1.000 | 2.500 | ||
| 1200 | 0.050 | 0.500 | 1.250 | 225 | 0.267 | 2.667 | 6.667 | ||
| 2745 | 0.022 | 0.219 | 0.546 | 515 | 0.117 | 1.165 | 2.913 | ||
| 4483 | 0.013 | 0.134 | 0.335 | 841 | 0.071 | 0.713 | 1.784 | ||
| 80 | 0.750 | 7.500 | 18.750 | 15 | 4.000 | 40.000 | 100.000 | ||
| 826 | 0.073 | 0.726 | 1.816 | 155 | 0.387 | 3.871 | 9.677 | ||
| Quantity | Symbol | Unit | Pyrex | Polydimethylsiloxane (PDMS) | Water | SAW |
|---|---|---|---|---|---|---|
| [40] | [42,43] | [44] | [36] | |||
| Width | or w | 30–900 | 30–750 | 600 | - | |
| Height | H or h | 60–1800 | 60–1500 | 125 | - | |
| Density | or | 2230 | 1070 | 997 | - | |
| Bulk modulus | or | 38.46 | 1.12 | 2.23 | - | |
| Longitudinal sound speed | or | 5591 | 1030 | 1496 | - | |
| Transversal sound speed | 3424 | 100 | - | - | ||
| Damping coefficient | or | 1 | 0.001 | 0.001 | 0.002 | 0 |
| Acoustic impedance ratio | 1 | 8.4 | 0.7 | 1 | - | |
| SAW wavelength | - | - | - | 600 | ||
| SAW displacement amplitude | - | - | - | 0.1 | ||
| SAW on-resonance frequency | MHz | - | - | - | 1.24 | |
| SAW off-resonance frequency | MHz | - | - | - | 6.65 |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skov, N.R.; Bruus, H. Modeling of Microdevices for SAW-Based Acoustophoresis — A Study of Boundary Conditions. Micromachines 2016, 7, 182. https://doi.org/10.3390/mi7100182
Skov NR, Bruus H. Modeling of Microdevices for SAW-Based Acoustophoresis — A Study of Boundary Conditions. Micromachines. 2016; 7(10):182. https://doi.org/10.3390/mi7100182
Chicago/Turabian StyleSkov, Nils Refstrup, and Henrik Bruus. 2016. "Modeling of Microdevices for SAW-Based Acoustophoresis — A Study of Boundary Conditions" Micromachines 7, no. 10: 182. https://doi.org/10.3390/mi7100182