

A Microfluidic Chip for Single-Cell Capture Based on Stagnation Point Flow and Boundary Effects
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Microfluidic Channel Theory with Stagnation Point
2.2. The Combination of the Boundary Effect, Stagnation Point Flow, and Resistance Channel
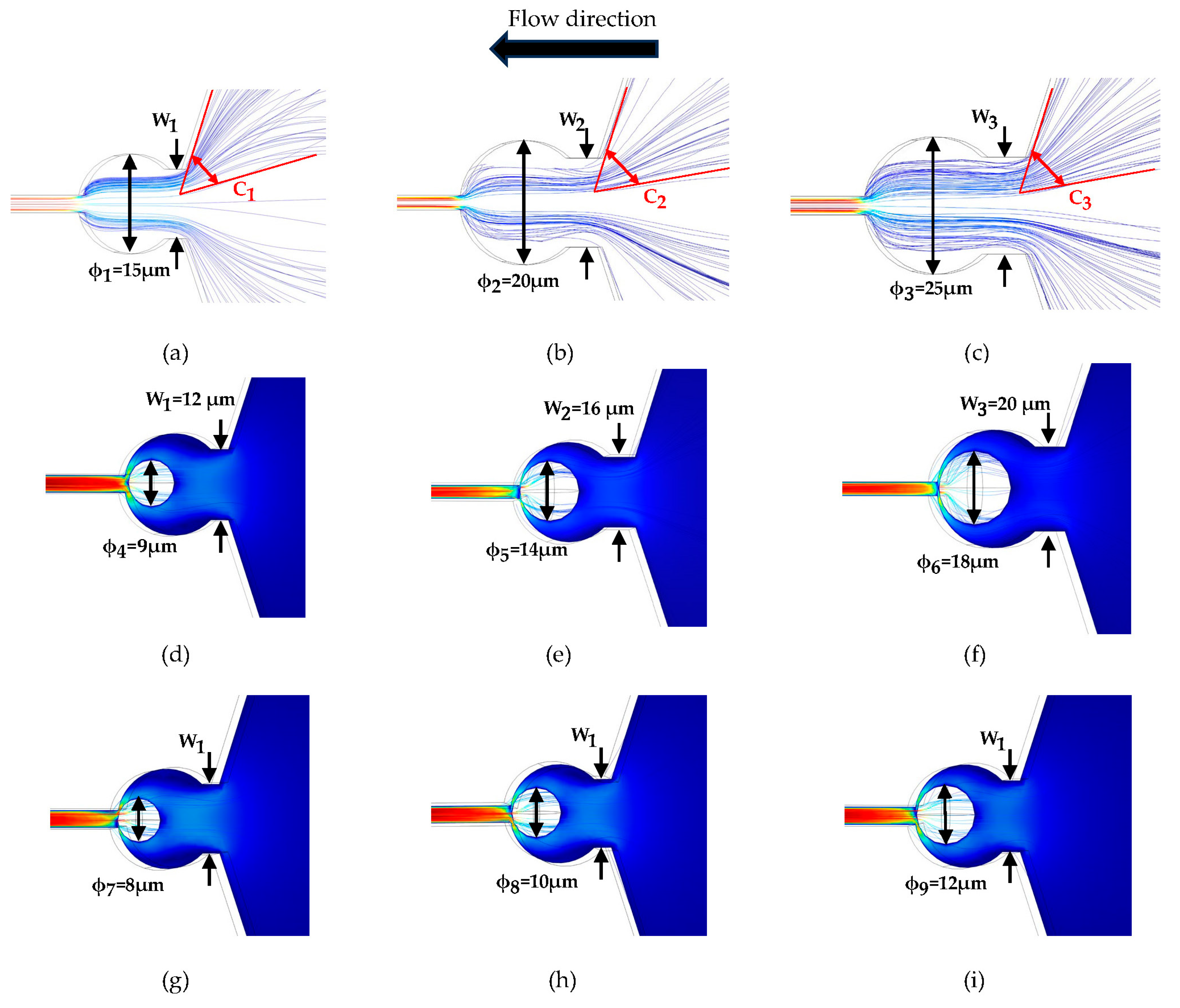
2.3. Flow Chamber Simulation
2.4. Design and Fabrication of Microfluidic Chip
2.5. Cell Suspension Preparation
2.6. Construction of Microfluidic Integrated System
3. Results
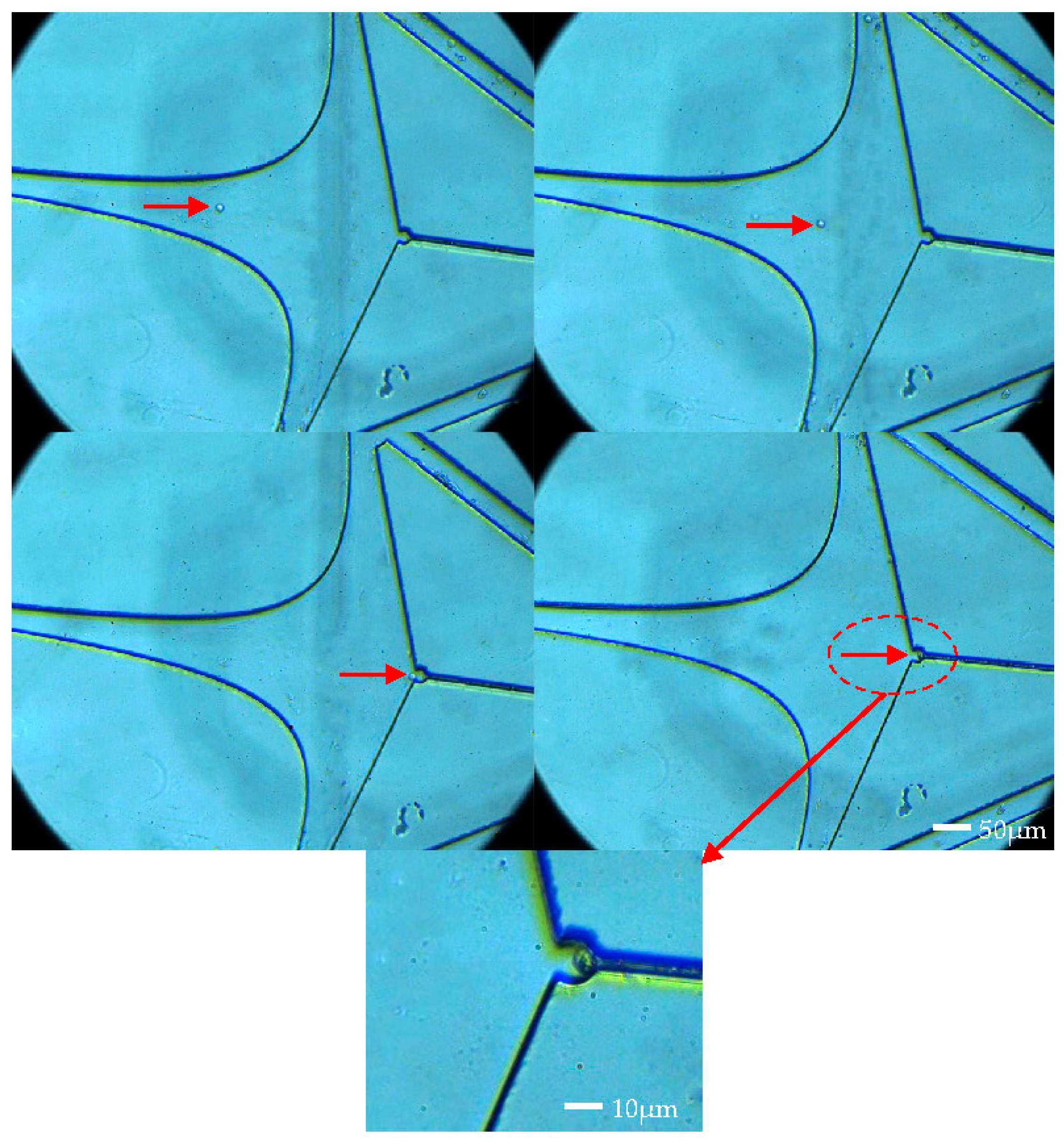
3.1. Single-Cell Capture Experiments
3.2. Stable Capture under Flow Disturbances
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.; Fan, Z.; Qiao, L.; Liu, B. Advances in Microfluidic Strategies for Single-Cell Research. TrAC Trends Anal. Chem. 2022, 157, 116822. [Google Scholar] [CrossRef]
- Jiang, Z.; Shi, H.; Tang, X.; Qin, J. Recent Advances in Droplet Microfluidics for Single-Cell Analysis. TrAC Trends Anal. Chem. 2023, 159, 116932. [Google Scholar] [CrossRef]
- Terada, Y.; Obara, A.; Briones, J.C.; Luo, X.; Espulgar, W.V.; Saito, M.; Takamatsu, H.; Tamiya, E. Development of Nano–Micro Fused LSPR Chip for In Situ Single-Cell Secretion Analysis. Micromachines 2023, 14, 1404. [Google Scholar] [CrossRef] [PubMed]
- Cai, L.; Friedman, N.; Xie, X.S. Stochastic Protein Expression in Individual Cells at the Single Molecule Level. Nature 2006, 440, 358–362. [Google Scholar] [CrossRef] [PubMed]
- Xu, D.; Zhang, W.; Li, H.; Li, N.; Lin, J.-M. Advances in Droplet Digital Polymerase Chain Reaction on Microfluidic Chips. Lab Chip 2023, 23, 1258–1278. [Google Scholar] [CrossRef]
- Li, G.; Ji, Y.; Wu, Y.; Liu, Y.; Li, H.; Wang, Y.; Chi, M.; Sun, H.; Zhu, H. Multistage Microfluidic Cell Sorting Method and Chip Based on Size and Stiffness. Biosens. Bioelectron. 2023, 237, 115451. [Google Scholar] [CrossRef]
- Ma, J.; Wu, Y.; Liu, Y.; Ji, Y.; Yang, M.; Zhu, H. Cell-Sorting Centrifugal Microfluidic Chip with a Flow Rectifier. Lab Chip 2021, 21, 2129–2141. [Google Scholar] [CrossRef] [PubMed]
- Clark, I.C.; Fontanez, K.M.; Meltzer, R.H.; Xue, Y.; Hayford, C.; May-Zhang, A.; D’Amato, C.; Osman, A.; Zhang, J.Q.; Hettige, P.; et al. Microfluidics-Free Single-Cell Genomics with Templated Emulsification. Nat. Biotechnol. 2023, 41, 1557–1566. [Google Scholar] [CrossRef] [PubMed]
- Jiao, Y.; Gao, L.; Ji, Y.; Liu, W. Recent Advances in Microfluidic Single-Cell Analysis and Its Applications in Drug Development. TrAC Trends Anal. Chem. 2022, 157, 116796. [Google Scholar] [CrossRef]
- Wu, Y.; Meng, Y. Cell Manipulation and Single Cell Characterization on Microfluidic Devices. TrAC Trends Anal. Chem. 2023, 168, 117301. [Google Scholar] [CrossRef]
- Kulkarni, M.B.; Ayachit, N.H.; Aminabhavi, T.M. A Short Review on Miniaturized Biosensors for the Detection of Nucleic Acid Biomarkers. Biosensors 2023, 13, 412. [Google Scholar] [CrossRef] [PubMed]
- Sims, C.E.; Allbritton, N.L. Analysis of Single Mammalian Cells On-Chip. Lab Chip 2007, 7, 423. [Google Scholar] [CrossRef] [PubMed]
- Kulkarni, M.B.; Velmurugan, K.; Nirmal, J.; Goel, S. Development of Dexamethasone Loaded Nanomicelles Using a 3D Printed Microfluidic Device for Ocular Drug Delivery Applications. Sens. Actuators A Phys. 2023, 357, 114385. [Google Scholar] [CrossRef]
- Kulkarni, M.B.; Goel, S. Mini-Thermal Platform Integrated with Microfluidic Device with on-Site Detection for Real-Time DNA Amplification. BioTechniques 2023, 74, 158–171. [Google Scholar] [CrossRef] [PubMed]
- Yu, M.; Li, Y.-J.; Yang, Y.-N.; Xue, C.-D.; Xin, G.-Y.; Liu, B.; Qin, K.-R. A Microfluidic Array Enabling Generation of Identical Biochemical Stimulating Signals to Trapped Biological Cells for Single-Cell Dynamics. Talanta 2024, 267, 125172. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Jia, D.; Sha, X.; Zhang, G.; Li, W. Determination of the Three-Dimensional Rate of Cancer Cell Rotation in an Optically-Induced Electrokinetics Chip Using an Optical Flow Algorithm. Micromachines 2018, 9, 118. [Google Scholar] [CrossRef] [PubMed]
- Abedini-Nassab, R.; Emamgholizadeh, A. Controlled Transport of Magnetic Particles and Cells Using C-Shaped Magnetic Thin Films in Microfluidic Chips. Micromachines 2022, 13, 2177. [Google Scholar] [CrossRef] [PubMed]
- Deng, Y.; Renaud, P.; Guo, Z.; Huang, Z.; Chen, Y. Single Cell Isolation Process with Laser Induced Forward Transfer. J. Biol. Eng. 2017, 11, 2. [Google Scholar] [CrossRef]
- Tan, W.-H.; Takeuchi, S. Dynamic Microarray System with Gentle Retrieval Mechanism for Cell-Encapsulating Hydrogel Beads. Lab Chip 2008, 8, 259–266. [Google Scholar] [CrossRef] [PubMed]
- Jin, D.; Deng, B.; Li, J.X.; Cai, W.; Tu, L.; Chen, J.; Wu, Q.; Wang, W.H. A Microfluidic Device Enabling High-Efficiency Single Cell Trapping. Biomicrofluidics 2015, 9, 014101. [Google Scholar] [CrossRef]
- Yoon, Y.; Lee, J.; Yoo, K.-C.; Sul, O.; Lee, S.-J.; Lee, S.-B. Deterministic Capture of Individual Circulating Tumor Cells Using a Flow-Restricted Microfluidic Trap Array. Micromachines 2018, 9, 106. [Google Scholar] [CrossRef] [PubMed]
- Nagai, M.; Kato, K.; Oohara, K.; Shibata, T. Pick-and-Place Operation of Single Cell Using Optical and Electrical Measurements for Robust Manipulation. Micromachines 2017, 8, 350. [Google Scholar] [CrossRef] [PubMed]
- Dockx, G.; Verwijlen, T.; Sempels, W.; Nagel, M.; Moldenaers, P.; Hofkens, J.; Vermant, J. Simple Microfluidic Stagnation Point Flow Geometries. Biomicrofluidics 2016, 10, 043506. [Google Scholar] [CrossRef] [PubMed]
- Dang, Y.; Hu, S.; Ou, Z.; Zhang, Q. Microparticle Manipulation Performed on a Swirl-Based Microfluidic Chip Featured by Dual-Stagnation Points. Langmuir 2023, 39, 11245–11258. [Google Scholar] [CrossRef] [PubMed]
- Qin, K.; Hu, X.; Liu, Z. Analysis of Pulsatile Flow in the Parallel-Plate Flow Chamber with Spatial Shear Stress Gradient. J. Hydrodyn. 2007, 19, 113–120. [Google Scholar] [CrossRef]
- Usami, S.; Chen, H.-H.; Zhao, Y.; Chien, S.; Skalak, R. Design and Construction of a Linear Shear Stress Flow Chamber. Ann. Biomed. Eng. 1993, 21, 77–83. [Google Scholar] [CrossRef] [PubMed]
- Yu, M.; Chen, Z.; Xiang, C.; Liu, B.; Xie, H.; Qin, K. Microfluidic-Based Single Cell Trapping Using a Combination of Stagnation Point Flow and Physical Barrier. Acta Mech. Sin. 2016, 32, 422–429. [Google Scholar] [CrossRef]
- Judy, J.; Maynes, D.; Webb, B.W. Characterization of Frictional Pressure Drop for Liquid Flows through Microchannels. Int. J. Heat Mass Transf. 2002, 45, 3477–3489. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| n | 2.5 |
| 3/4π | |
| Cell diameter | 8~12 μm |
| 12 μm | |
| 15 μm | |
| Length L (x-direction) | 1 mm |
| The width of the inlet W (y-direction) | 50 μm |
| Height H (z-direction) | 60 μm |
| 5 μm | |
| The rest of the channel widths | 50 μm |
| Inlet flow rate | 60 μL/min, 80 μL/min, and 120 μL/min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, L.; Lv, X.; Zhou, W.; Li, H.; Yang, Q.; Chen, X.; Wu, Y. A Microfluidic Chip for Single-Cell Capture Based on Stagnation Point Flow and Boundary Effects. Micromachines 2024, 15, 456. https://doi.org/10.3390/mi15040456
Cheng L, Lv X, Zhou W, Li H, Yang Q, Chen X, Wu Y. A Microfluidic Chip for Single-Cell Capture Based on Stagnation Point Flow and Boundary Effects. Micromachines. 2024; 15(4):456. https://doi.org/10.3390/mi15040456
Chicago/Turabian StyleCheng, Long, Xiao Lv, Wenchao Zhou, Huan Li, Qiushuang Yang, Xing Chen, and Yihui Wu. 2024. "A Microfluidic Chip for Single-Cell Capture Based on Stagnation Point Flow and Boundary Effects" Micromachines 15, no. 4: 456. https://doi.org/10.3390/mi15040456