
Analysis of the Frequency-Dependent Vibration Rectification Error in Area-Variation-Based Capacitive MEMS Accelerometers
 , ,
, ,
Abstract
:1. Introduction
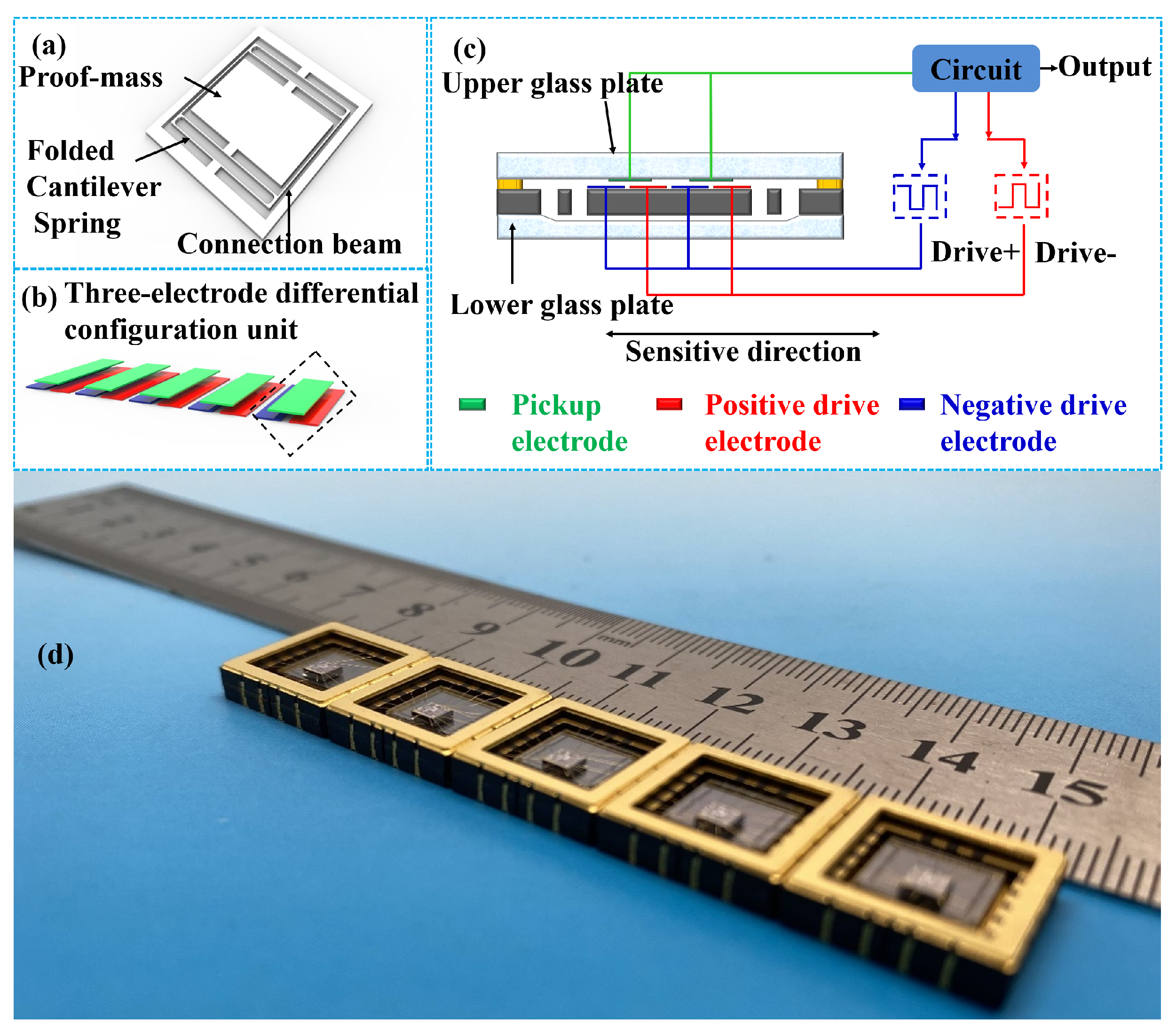
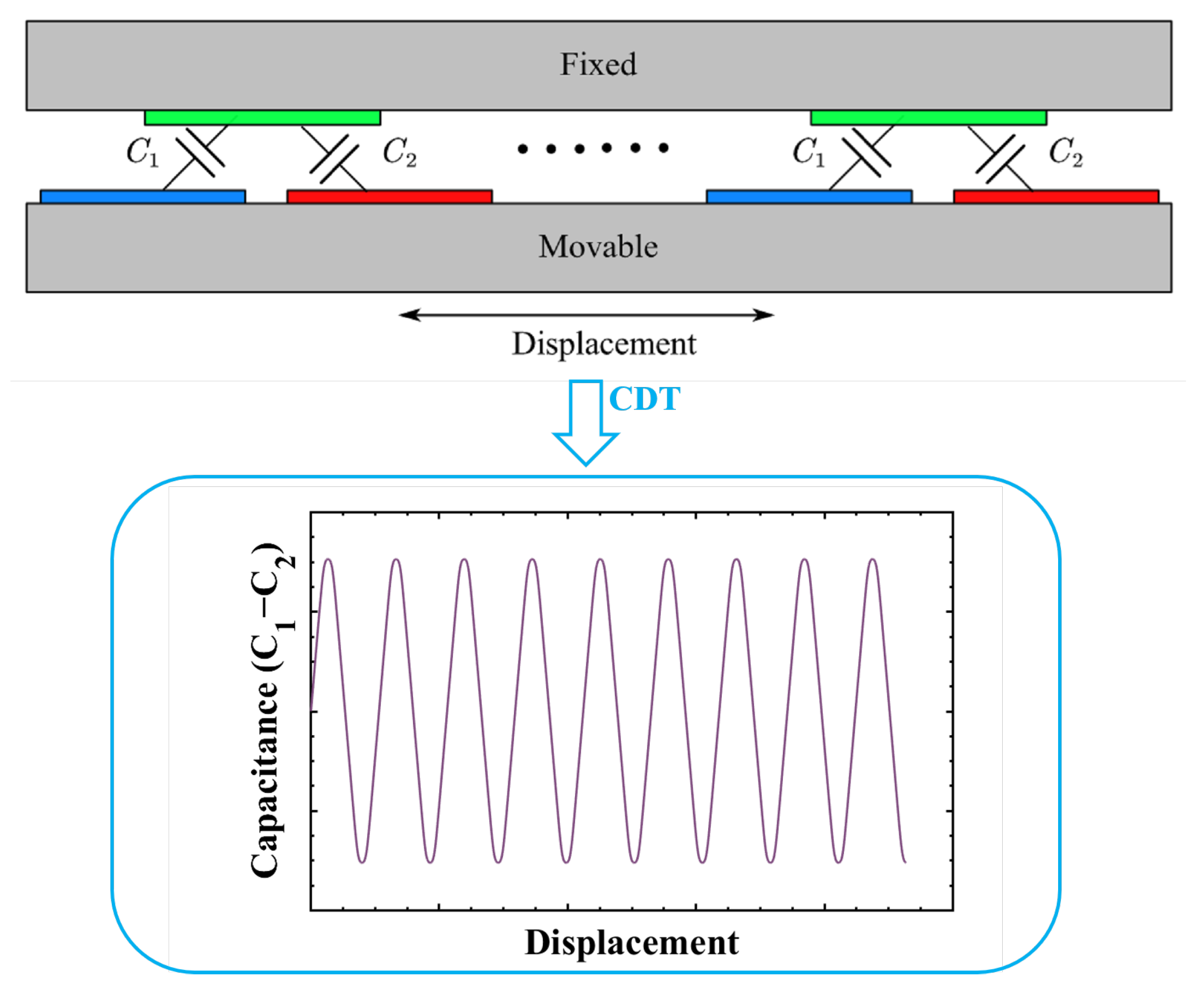
2. Description of the MEMS Accelerometer
3. Model of the Accelerometer and Its VRE
3.1. Output Model of the Accelerometer and Its VRE
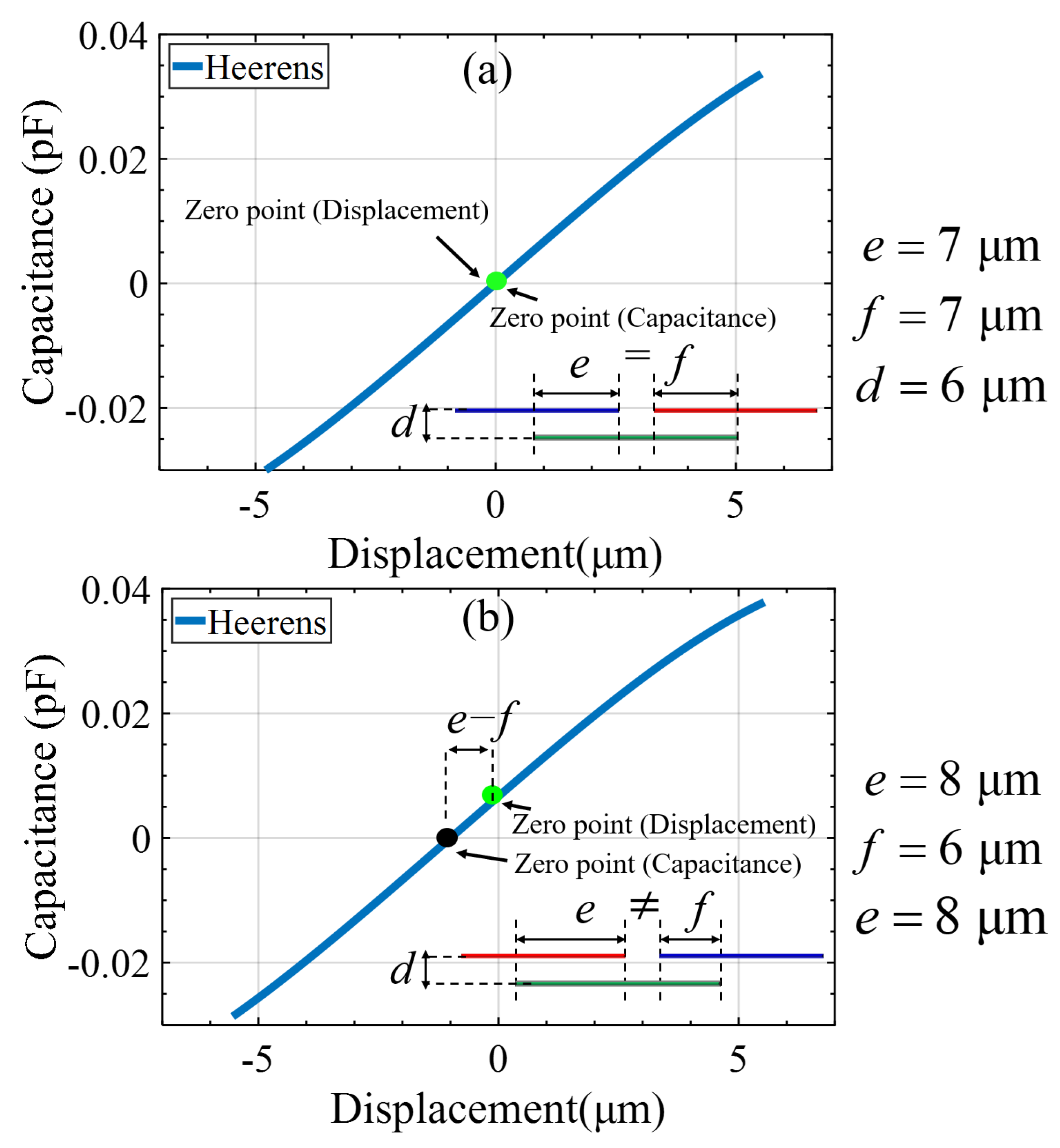
3.2. Analysis of Accelerometer’s Signal Conversion Process by Steps and Origin of Second-Order Nonlinearity
3.3. Nonlinearity Analysis in Terms of the Model Equation
4. Experiments and Results
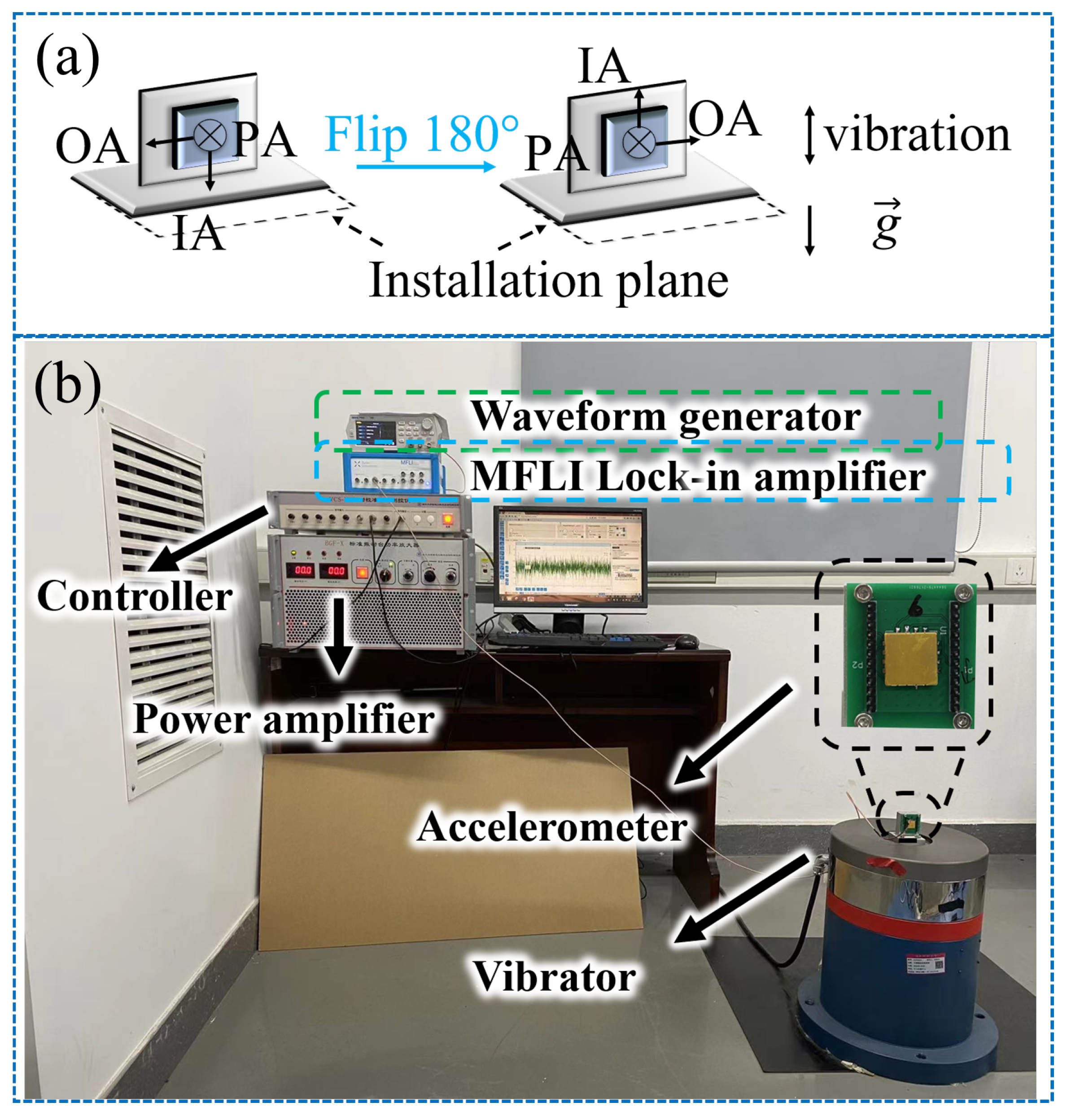
4.1. Test Method and Setup
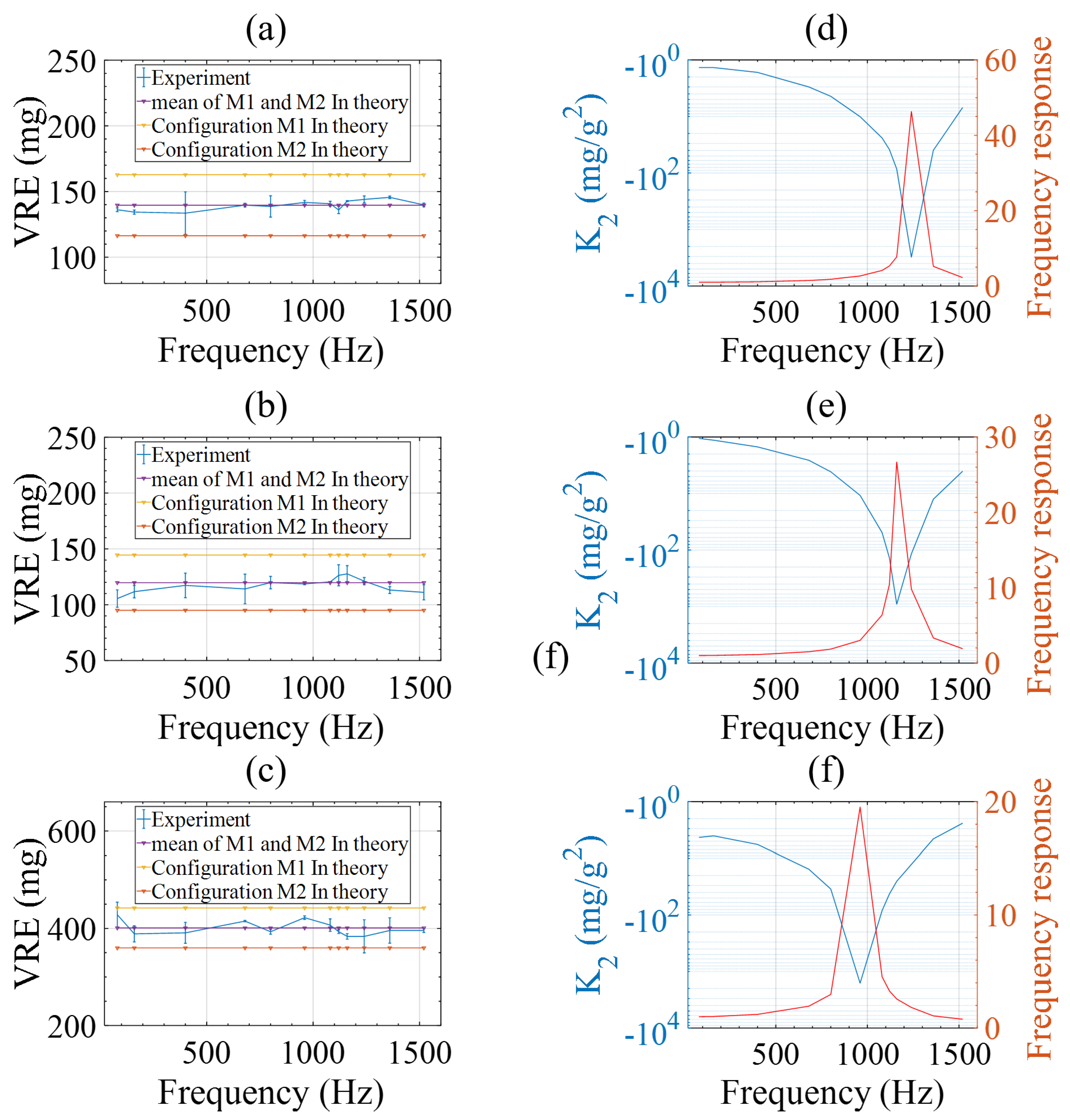
4.2. Preliminary Test of Accelerometer Nonlinearity
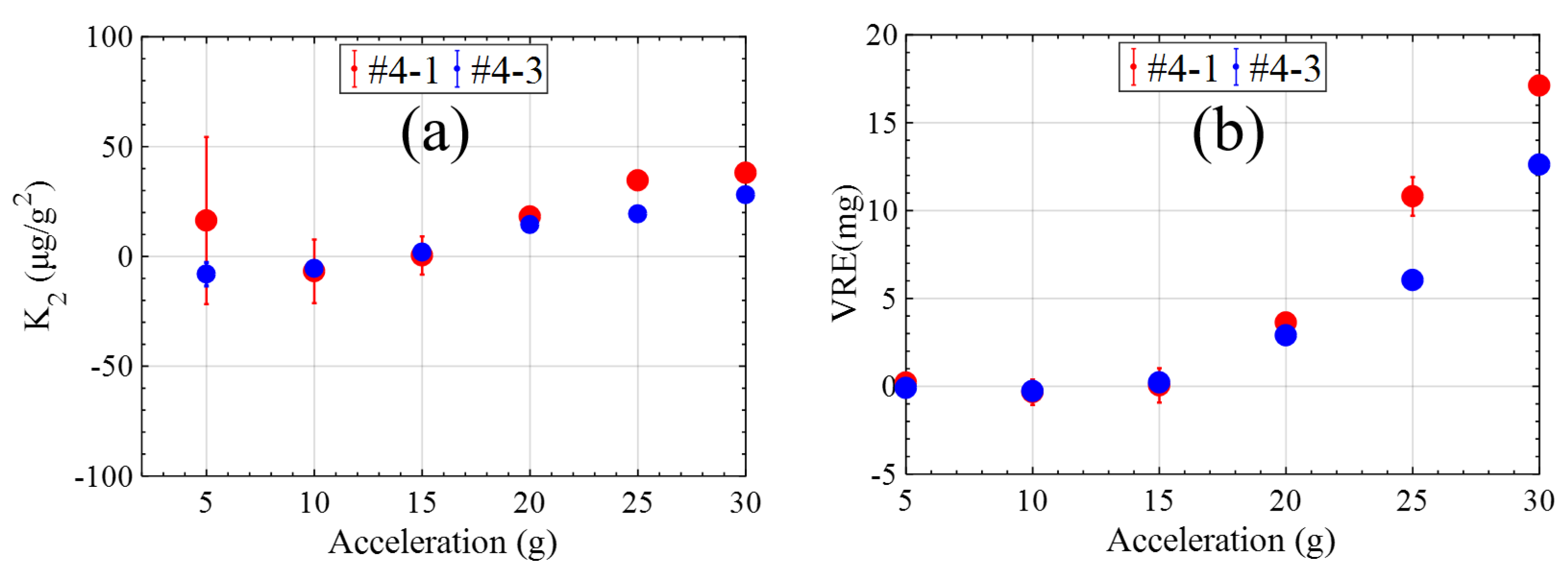
4.3. Improvement of Accelerometer Nonlinearity
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Langfelder, G.; Bestetti, M.; Gadola, M. Silicon MEMS inertial sensors evolution over a quarter century. J. Micromech. Microeng. 2021, 31, 084002. [Google Scholar] [CrossRef]
- Pham, L.; DeSimone, A. Vibration Rectification in MEMS Accelerometers; Analog Devices, Inc.: Wilmington, MA, USA, 2017. [Google Scholar]
- Diaz, M.C. Use of Visco-Elastic Polymer to Reduce Acoustic and/or Vibration Induced Error in Microelectromechanical Devices and Systems. U.S. Patent 7,298,014, 20 November 2007. [Google Scholar]
- Zhao, M.; Zhao, Q.; Chen, Z.; Lu, W.; Zhang, Y.; Yan, G. A 0.084% nonlinearity open-loop capacitive micro-accelerometer with on-chip digital nonlinearity calibration and embedded EEPROM. In Proceedings of the 2021 IEEE International Symposium on Circuits and Systems (ISCAS), Daegu, Republic of Korea, 22–28 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Odira, I.; Keraita, J.; Byiringiro, J. Multimode TED-tuned beam mass damper for low-g capacitive MEMS accelerometers VRE reduction. J. Vib. Control 2023. [Google Scholar] [CrossRef]
- Lafond, P.H. Low vibration rectification in a closed-loop, in-plane MEMS device. Acoust. Soc. Am. J. 2010, 128, 3264. [Google Scholar] [CrossRef]
- Habibi, S.; Cooper, S.J.; Stauffer, J.M.; Dutoit, B. Gun hard inertial measurement unit based on MEMS capacitive accelerometer and rate sensor. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 232–237. [Google Scholar]
- Li, Z.; Zhang, S.; Zhou, Y.; Wu, W.; Tu, L.; Liu, J. Calibrating nonlinearity coefficients of a nano-g accelerometer by dual-frequency excitation on a shaker. Measurement 2023, 225, 114016. [Google Scholar] [CrossRef]
- Belyaev, Y.; Yurchenko, V.; Piatak, I. Error Calculation for Accelerometer Calibration by Broadband Random Vibration Analysis. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg, Moscow, Russia, 26–29 January 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1156–1159. [Google Scholar]
- Xia, G.; Zhao, Y.; Shi, Q.; Huang, J.; Qiu, A. A Novel Frequency Readout Method and Circuit for Navigation-Grade Vibrating Beam Accelerometers. IEEE Sensors J. 2023, 23, 21363–21373. [Google Scholar] [CrossRef]
- Zaiss, C. IMU Design for High Vibration Environments with Special Consideration for Vibration Rectification. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2012. [Google Scholar]
- Zwahlen, P.; Dong, Y.; Nguyen, A.; Rudolf, F.; Stauffer, J.; Ullah, P.; Ragot, V. Breakthrough in high performance inertial navigation grade Sigma-Delta MEMS accelerometer. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 15–19. [Google Scholar]
- Lafond, P.H.; Yu, L. MEMS Vertical Comb Drive with Improved Vibration Performance. U.S. Patent 7,469,588, 30 December 2008. [Google Scholar]
- Wei, Y.; Yang, J.; Li, P.; Zhang, X.; Liang, P. Analysis and Optimization Method of the Vibration Rectification Error of a Pendulous Accelerometer. IEEE Sens. J. 2021, 21, 19847–19856. [Google Scholar] [CrossRef]
- Beitia, J. Miniature high-performance Quartz accelerometer for High-Dynamic, precision guided systems. In Proceedings of the 2017 DGON Inertial Sensors and Systems (ISS), Karlsruhe, Germany, 19–20 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–13. [Google Scholar]
- Feingold, A.; Grinberg, B. In-plane Bulk-Micromachining fabrication of high dynamic range tactical grade open loop and closed loop MEMS accelerometers. In Proceedings of the 2015 IEEE SENSORS, Busan, Republic of Korea, 1–4 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–4. [Google Scholar]
- Zwahlen, P.; Nguyen, A.M.; Dong, Y.; Rudolf, F.; Pastre, M.; Schmid, H. Navigation grade MEMS accelerometer. In Proceedings of the 2010 IEEE 23rd International Conference on Micro Electro Mechanical Systems (MEMS), Hong Kong, China, 24–28 January 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 631–634. [Google Scholar]
- Rao, K.; Liu, H.; Wei, X.; Wu, W.; Hu, C.; Fan, J.; Liu, J.; Tu, L. A high-resolution area-change-based capacitive MEMS tilt sensor. Sensors Actuators A Phys. 2020, 313, 112191. [Google Scholar] [CrossRef]
- Rao, K.; Wei, X.; Zhang, S.; Zhang, M.; Hu, C.; Liu, H.; Tu, L.C. A MEMS micro-g capacitive accelerometer based on through-silicon-wafer-etching process. Micromachines 2019, 10, 380. [Google Scholar] [CrossRef] [PubMed]
- IEEE Std 1293-2018; IEEE Standard Specification Format Guide and Test Procedure for Linear Single-Axis, Nongyroscopic Accelerometers (Revision of IEEE Std 1293-1998). IEEE: Piscataway, NJ, USA, 2019; pp. 1–271. [CrossRef]
- Heerens, W.C. Application of capacitance techniques in sensor design. J. Phys. E Sci. Instrum. 1986, 19, 897. [Google Scholar] [CrossRef]
- Christel, L.A.; Bernstein, M.; Craddock, R.; Petersen, K. Vibration rectification in silicon micromachined accelerometers. In Proceedings of the TRANSDUCERS’91: 1991 International Conference on Solid-State Sensors and Actuators. Digest of Technical Papers, San Francisco, CA, USA, 24–27 June 1991; IEEE: Piscataway, NJ, USA, 1991; pp. 89–92. [Google Scholar]
- Yang, T.; Yang, G.; Lu, W.; Wang, J.; Han, D.; Yin, Y.; Xu, J.; Ren, T.; Zhang, F.; Liu, P.; et al. A Miniature Quartz Vibrating Beam Accelerometer. In Proceedings of the 2020 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 15–16 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–13. [Google Scholar]
- Guan, W.; Meng, X.; Dong, X. Testing vibration rectification error with vibrafuge. Mapan 2014, 29, 289–294. [Google Scholar] [CrossRef]
- Guan, W.; Meng, X.; Dong, X. Testing accelerometer rectification error caused by multidimensional composite inputs with double turntable centrifuge. Rev. Sci. Instrum. 2014, 85, 125003. [Google Scholar] [CrossRef] [PubMed]
- Yucetas, M.; Pulkkinen, M.; Kalanti, A.; Salomaa, J.; Aaltonen, L.; Halonen, K. A high-resolution accelerometer with electrostatic damping and improved supply sensitivity. IEEE J. Solid-State Circuits 2012, 47, 1721–1730. [Google Scholar] [CrossRef]
- Fain, B.; Souchon, F.; Berthelot, A.; Anciant, R.; Robert, P.; Jourdan, G. Dynamic control of an accelerometer bandwidth through tunable damping factor and effective moment of inertia. In Proceedings of the 2018 IEEE Micro Electro Mechanical Systems (MEMS), Belfast, UK, 21–25 January 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 948–951. [Google Scholar]
- Deimerly, Y.; Rey, P.; Robert, P.; Bourouina, T.; Jourdan, G. Electromechanical damping in MEMS accelerometers: A way towards single chip gyrometer accelerometer co-integration. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 725–728. [Google Scholar]
- Yücetaş, M.; Aaltonen, L.; Pulkkinen, M.; Salomaa, J.; Kalanti, A.; Halonen, K. A charge balancing accelerometer interface with electrostatic damping. In Proceedings of the 2011 Proceedings of the ESSCIRC (ESSCIRC), Helsinki, Finland, 12–16 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 291–294. [Google Scholar]
- Lavinia, C.; Olivier, B.; Hélène, T.; Jérôme, E.; Thierry, C. 3-axis high Q MEMS accelerometer with simultaneous damping control. In Proceedings of the 2016 14th IEEE International New Circuits and Systems Conference (NEWCAS), Vancouver, BC, Canada, 26–29 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–4. [Google Scholar]
- Petkov, V.P.; Balachandran, G.K.; Beintner, J. A fully differential charge-balanced accelerometer for electronic stability control. IEEE J. Solid-State Circuits 2013, 49, 262–270. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometers | Width of Drive Electrodes () | Distance between Pickup and Drive Electrodes () | Position Offset of the Pickup Electrodes () | Resonance Frequency |
|---|---|---|---|---|
| #1 | 14 | 6.5 | 0.9 | 1216 |
| #2 | 14 | 6.0 | 0.7 | 1163 |
| #3 | 14 | 5.5 | 1.8 | 982 |
| Unit | m | m | m | Hz |
| Frequency (Hz) | Amplitude (g) | Frequency Response | Displacement Amplitude of Proof Mass (m) |
|---|---|---|---|
| 80 | 10 | 1 | 1.85 |
| 160 | 9.93 | 1.01 | |
| 400 | 8.98 | 1.11 | |
| ⋯ | ⋯ | ⋯ | |
| 1220 (near resonance) | 1.88 | 5.32 | |
| ⋯ | ⋯ | ⋯ | |
| 1360 | 1.92 | 5.21 | |
| 1520 | 4.50 | 2.23 |
| Accelerometers | Width of Drive Electrodes () | Distance between Pickup and Drive Electrodes () | Position Offset of the Pickup Electrodes () | Resonance Frequency |
|---|---|---|---|---|
| #4-1 | 42 | 6 | 1 | 1020 |
| #4-3 | 42 | 6 | 1 | 1060 |
| Unit | m | m | m | Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Li, Z.; Wang, Q.; Yang, Y.; Wang, Y.; He, W.; Liu, J.; Tu, L.; Liu, H. Analysis of the Frequency-Dependent Vibration Rectification Error in Area-Variation-Based Capacitive MEMS Accelerometers. Micromachines 2024, 15, 65. https://doi.org/10.3390/mi15010065
Zhang S, Li Z, Wang Q, Yang Y, Wang Y, He W, Liu J, Tu L, Liu H. Analysis of the Frequency-Dependent Vibration Rectification Error in Area-Variation-Based Capacitive MEMS Accelerometers. Micromachines. 2024; 15(1):65. https://doi.org/10.3390/mi15010065
Chicago/Turabian StyleZhang, Shaolin, Zhi Li, Qiu Wang, Yuanxia Yang, Yongzhen Wang, Wen He, Jinquan Liu, Liangcheng Tu, and Huafeng Liu. 2024. "Analysis of the Frequency-Dependent Vibration Rectification Error in Area-Variation-Based Capacitive MEMS Accelerometers" Micromachines 15, no. 1: 65. https://doi.org/10.3390/mi15010065