
A Review of Single-Cell Microrobots: Classification, Driving Methods and Applications
Abstract
:1. Introduction
2. Types of Single-Cell Robots
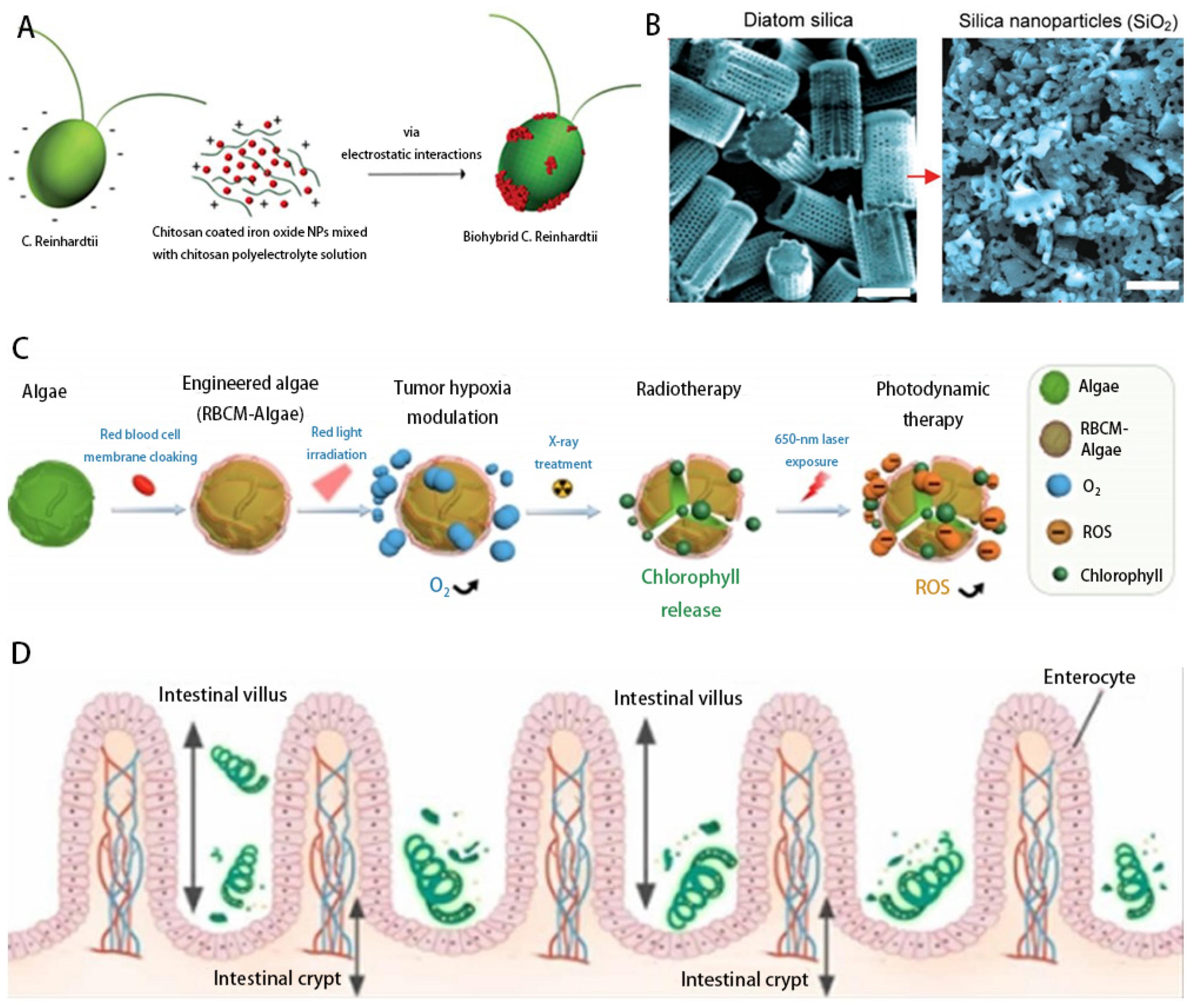
2.1. Algae

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Advantages | Disadvantages | Classification | Features | Target | Application | Efficiency | Reference |
|---|---|---|---|---|---|---|---|---|
| Algae | Self-propelled, self-fluorescent, phototropic | Limited stability and life cycle of algae in the vivo | Rhine Clothier | Phototropic, naturally autofluorescent, biocompatible | Intestinal tract | Cargo handling | 110 μm/s | [48] |
| Chlorella | Contains chlorophyll, which overcomes tumor hypoxia | Tumor tissue | Relieving tumor hypoxia | 80 μm/s | [50] | |||
| Spirulina | Helical structure for noninvasive fluorescence imaging | Gastrointestinal tract | Tumor suppression by drug delivery | 85 μm/s | [25] | |||
| Diatom | Micro- and nanoscale porosity and large internal volume with biocompatibility | Intestines Road | Drug Delivery | 30 μm/s | [24] | |||
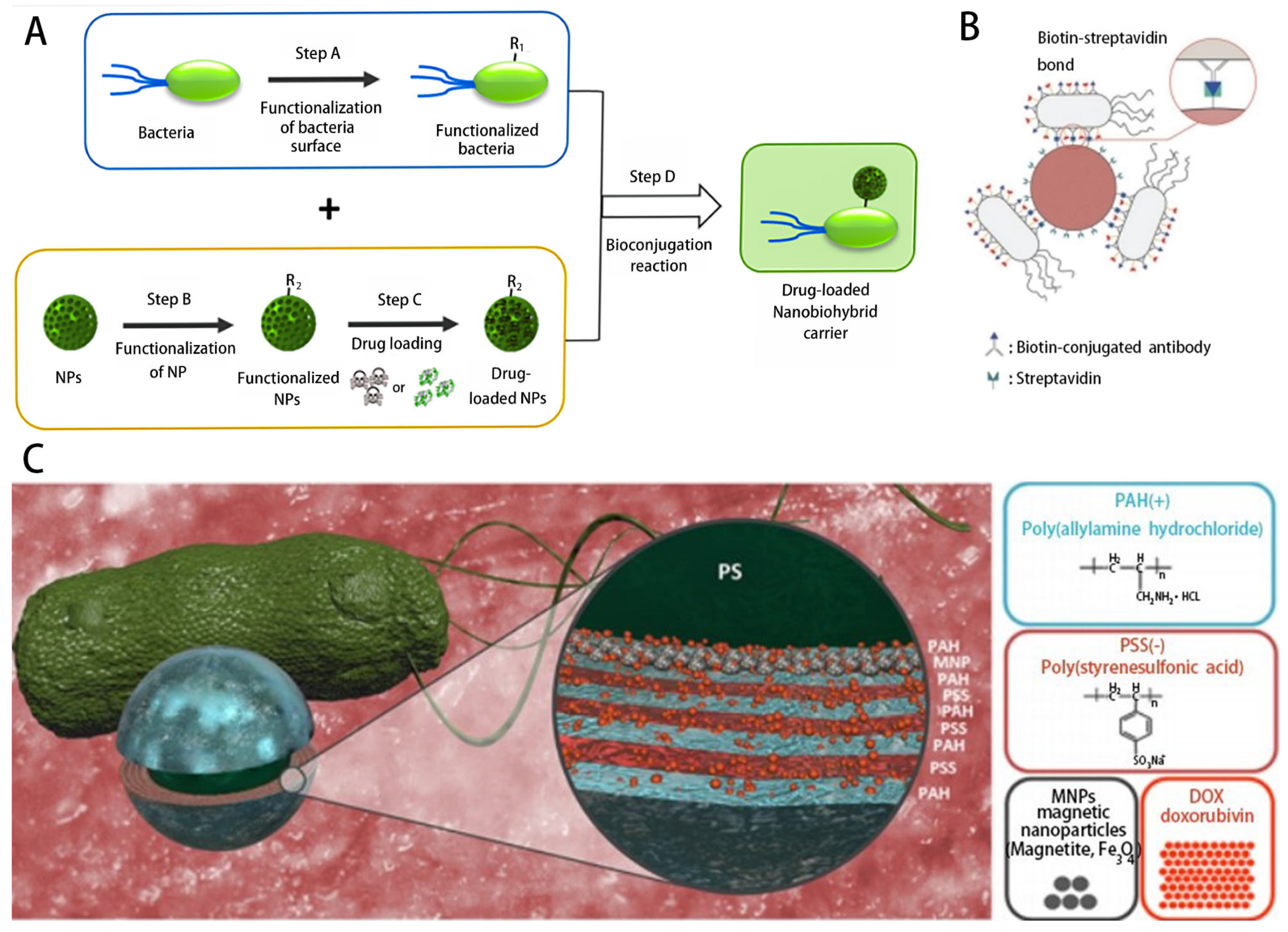
| Bacteria | Self-propelled, perception of physiological gradients | May be cleared by the body’s immune cells | Vibrio lysozyme | Multiple self-propulsion methods | Bacterially driven liposomes | 60 μm/s | [51] | |
| E. coli | Hydrophobicity, wettability, biocoupling and covalent binding | T1 breast cancer cells | Targeted drug delivery | 22.5 μm/s | [52] | |||
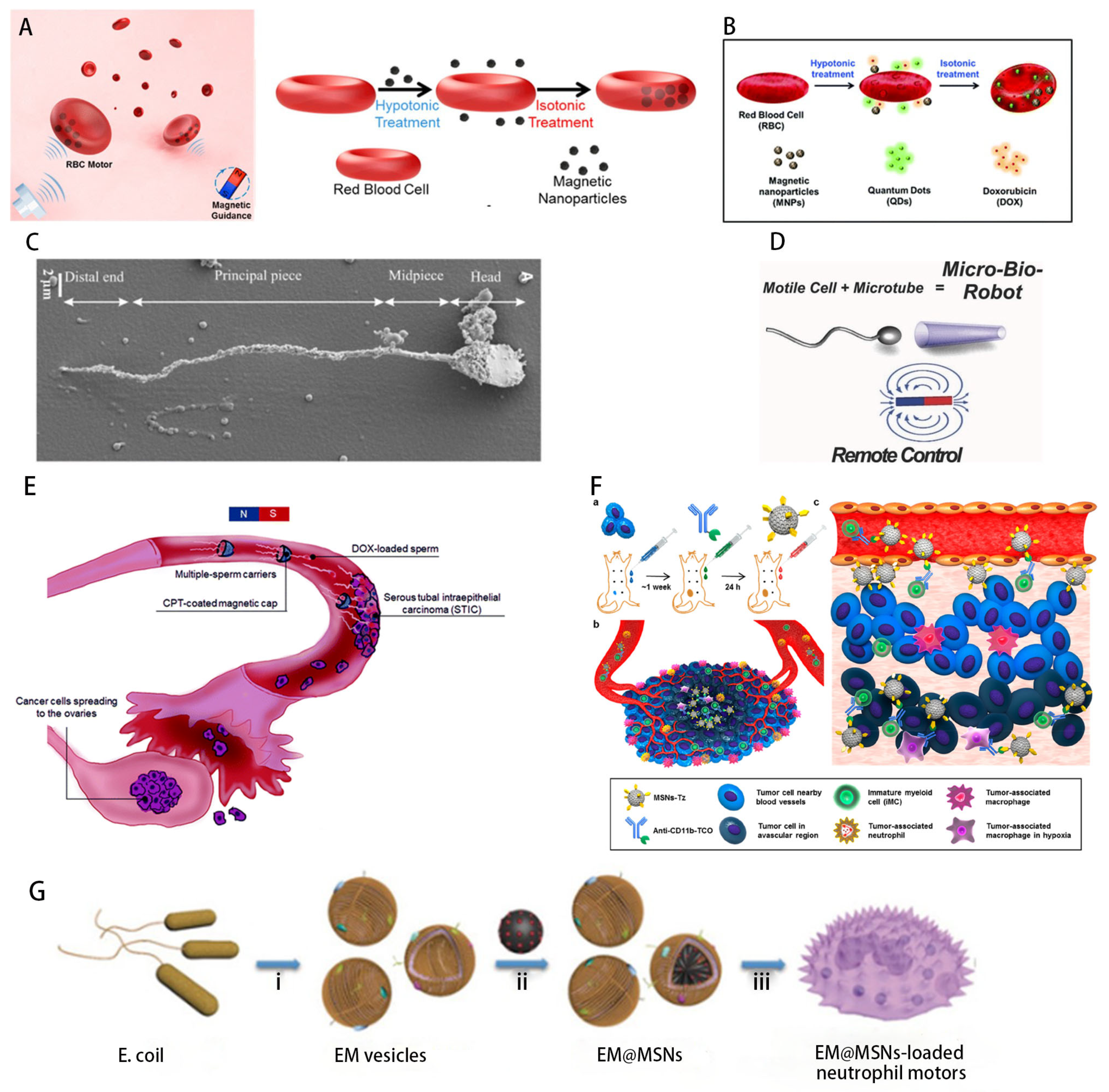
| Cells | Biocompatibility and high drug-carrying capacity | Small size, difficult to operate manually | Red blood cells | Surface immunosuppressive properties | vein endothelial cells | Targeted delivery of anticancer drug | 14 ± 2 μm/s, | [53] |
| Sperm cells | Stronger athletic ability | Reproductive System | 50 μm/s | [54] | ||||
| Neutrophils | Chemotaxis | Inflammation, tumor site | 0.165 μm/s | [55] |
2.2. Bacteria
2.3. Cells

3. External Field Drive
3.1. Optical Drives
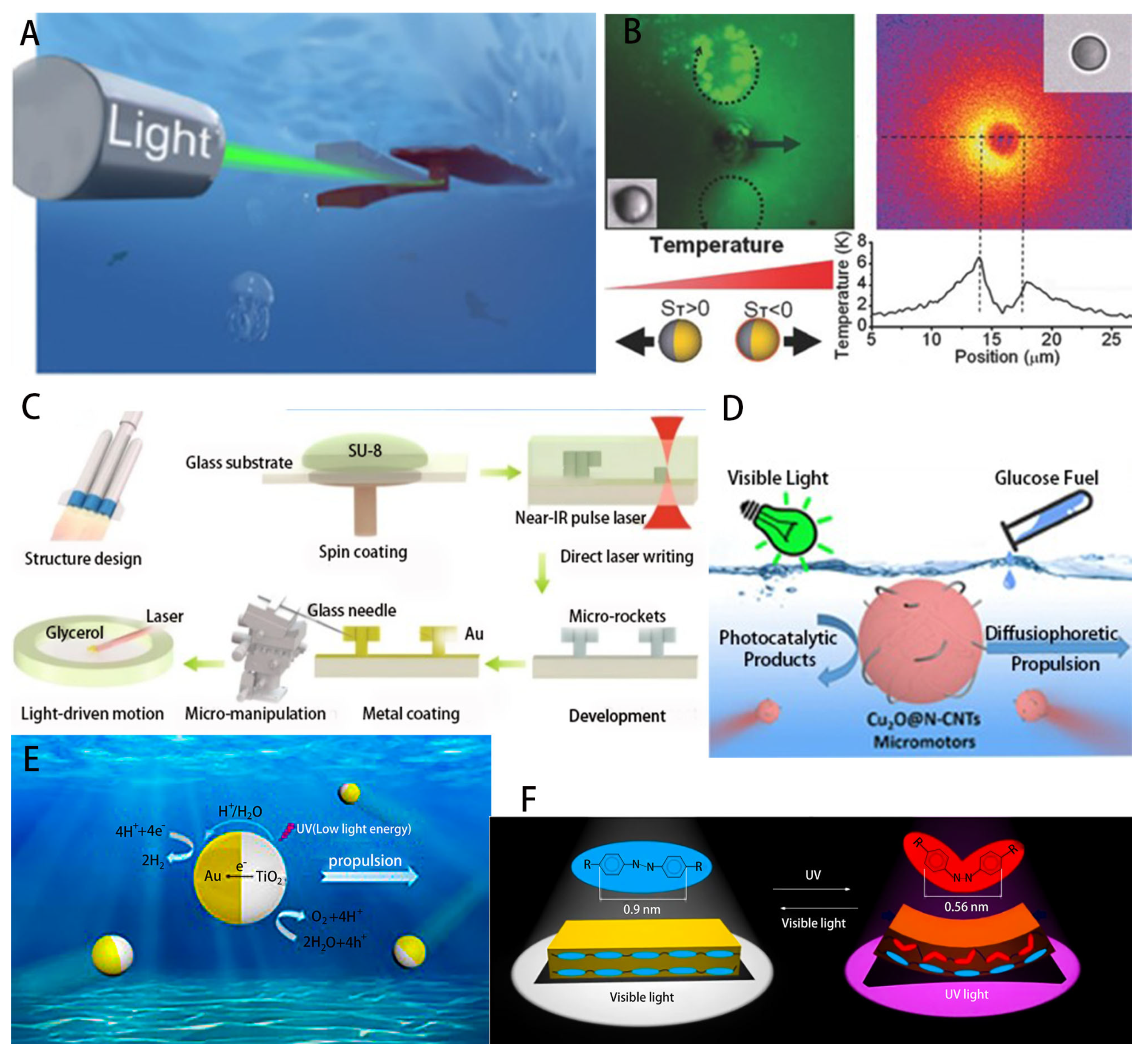
3.1.1. Phototropism
3.1.2. Photothermal or Photocatalytic Propulsion
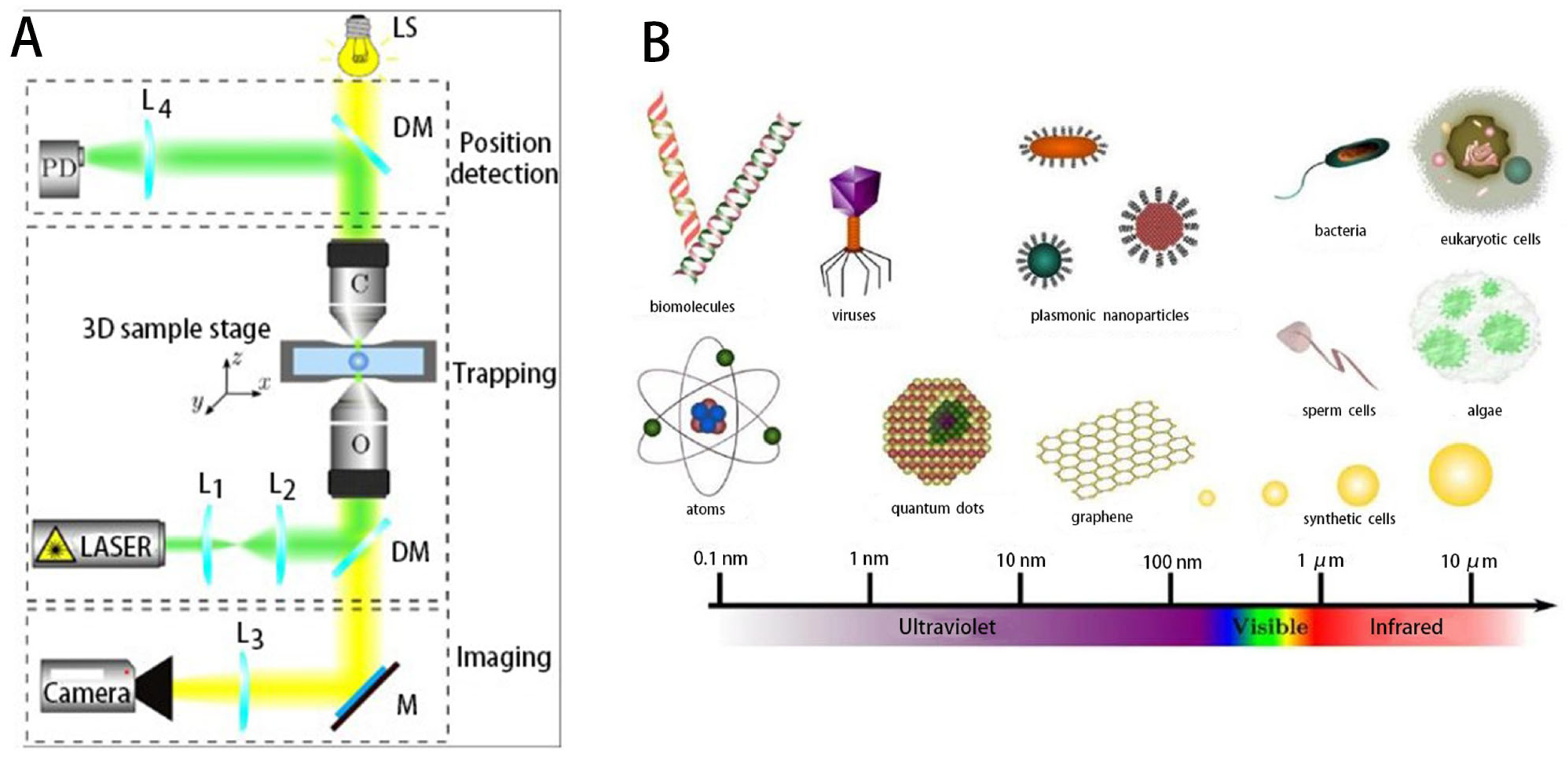
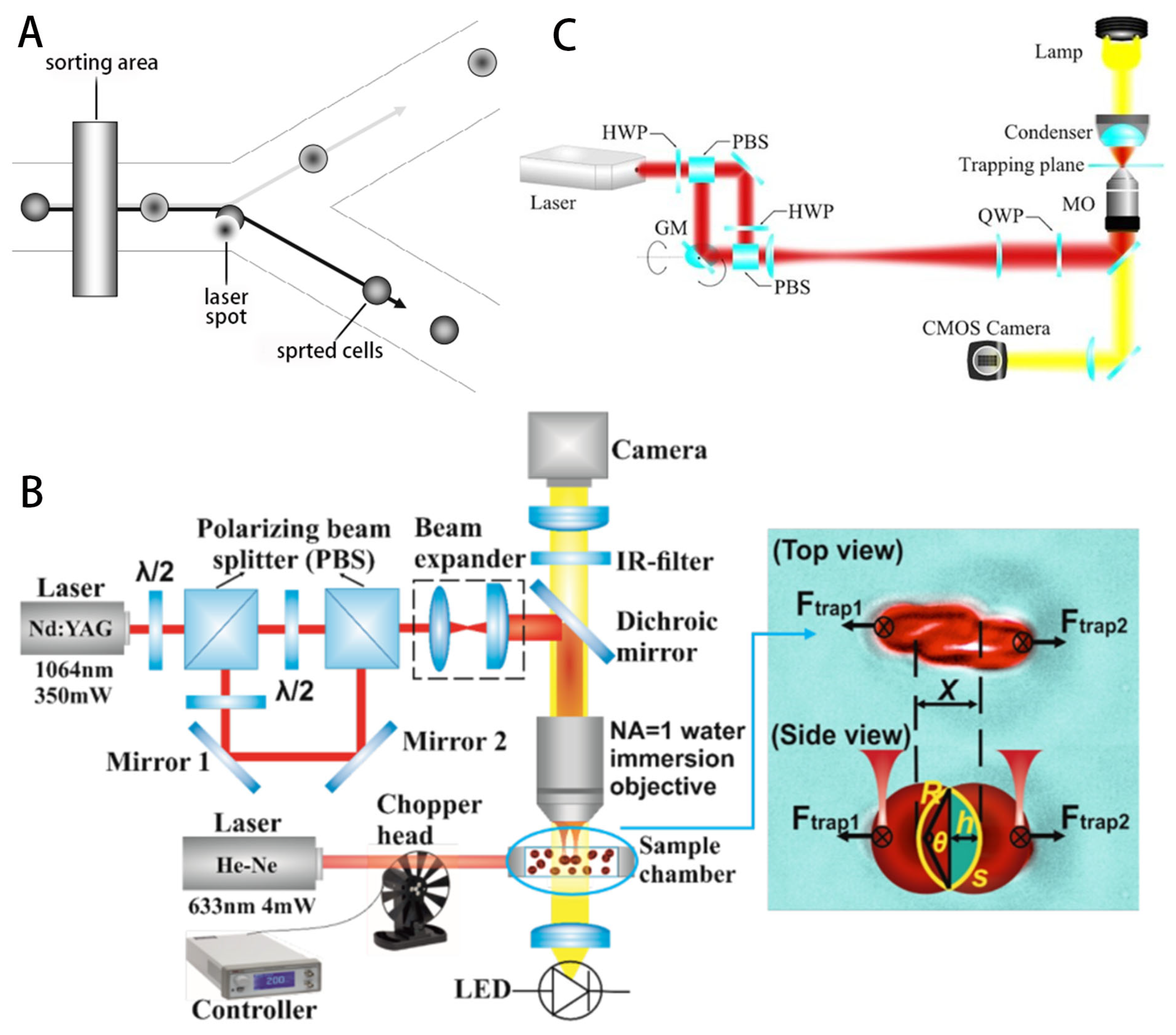
3.1.3. Optical Tweezer-Based Particle Manipulation
3.2. Acoustic Manipulation
3.2.1. Traveling-Wave Tweezers
3.2.2. Standing-Wave Tweezers
3.3. Magnetic Drives
3.3.1. Permanent Magnet System
3.3.2. Electromagnetic Drive System
3.4. Other Stimulus Drivers
4. Use Analysis
4.1. Cell Analysis
4.2. Organ and Tissue Analysis
4.3. Drug Delivery
5. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Y.Y.; Chen, D.X.; Liang, S.Z.; Dai, Y.G.; Bai, X.; Song, B.; Zhang, D.Y.; Chen, H.W.; Feng, L. Recent Advances in Field-Controlled Micro-Nano Manipulations and Micro-Nano Robots. Adv. Intell. Syst. 2022, 4, 2100116. [Google Scholar]
- Ghanbarzadeh-Dagheyan, A.; Jalili, N.; Ahmadian, M.T. A holistic survey on mechatronic Systems in Micro/Nano scale with challenges and applications. J. Microbio Robot. 2021, 17, 1–22. [Google Scholar]
- Halder, A.; Sun, Y. Biocompatible propulsion for biomedical micro/nano robotics. Biosens. Bioelectron. 2019, 139, 111334. [Google Scholar] [PubMed]
- Rathi, K.; Khetan, S.; Samarah, A.; Bagwari, J.; Bagwari, A. Nano-Bots: Designing and Manufacturing. In Proceedings of the 2022 14th International Conference on Computational Intelligence and Communication Networks (CICN), Al-Khobar, Saudi Arabia, 4–6 December 2022; pp. 600–605. [Google Scholar]
- Ye, H.; Wang, Y.; Xu, D.; Liu, X.; Liu, S.; Ma, X. Design and fabrication of micro/nano-motors for environmental and sensing applications. Appl. Mater. Today 2021, 23, 101007. [Google Scholar]
- Congjian, T.; Jun, L.; Xuebo, C.; Huang, T. Micro/nano-robotics in biomedical applications and its progresses. In Proceedings of the 2015 Chinese Automation Congress (CAC), Wuhan, China, 27–29 November 2015; pp. 376–380. [Google Scholar]
- Wich, T.; Mikczinski, M.; Fatikow, S. Micro-/Nano-Integration for MEMS based on nano-robotic assembly. In Proceedings of the ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics), Munich, Germany, 7–9 June 2010; pp. 1–8. [Google Scholar]
- Fu, D.M.; Wang, Z.; Tu, Y.F.; Peng, F. Interactions between Biomedical Micro-/Nano-Motors and the Immune Molecules, Immune Cells, and the Immune System: Challenges and Opportunities. Adv. Healthc. Mater. 2021, 10, 2001788. [Google Scholar]
- Liang, J.; Li, D.; Wang, D.; Liu, K.; Chen, L. Preparation of stable superhydrophobic film on stainless steel substrate by a combined approach using electrodeposition and fluorinated modification. Appl. Surf. Sci. 2014, 293, 265–270. [Google Scholar]
- Feng, L.; Bai, X.; Jia, L.; Zhang, C.; Chen, Y.; Chen, H. Chapter 9—Field-controlled micro-nano manipulations and micro-nano robots. In Micro and Nano Systems for Biophysical Studies of Cells and Small Organisms; Liu, X., Sun, Y., Eds.; Academic Press: Cambridge, MA, USA, 2021; pp. 201–225. [Google Scholar]
- Liu, H.; Jin, X.; Zhou, D.; Yang, Q.; Li, L. Potential application of functional micro-nano structures in petroleum. Pet. Explor. Dev. 2018, 45, 745–753. [Google Scholar]
- Yeo, M.; Kim, G. Micro/nano-hierarchical scaffold fabricated using a cell electrospinning/3D printing process for co-culturing myoblasts and HUVECs to induce myoblast alignment and differentiation. Acta Biomater. 2020, 107, 102–114. [Google Scholar]
- Huska, D.; Mayorga-Martinez, C.C.; Zelinka, R.; Pumera, M. Magnetic Biohybrid Robots as Efficient Drug Carrier to Generate Plant Cell Clones. Small 2022, 18, 2200208. [Google Scholar]
- Lin, Z.; Jiang, T.; Shang, J. The emerging technology of biohybrid micro-robots: A review. Bio Des. Manuf. 2022, 5, 107–132. [Google Scholar]
- Ricotti, L.; Menciassi, A.; Morishima, K. Guest editorial introduction to the Special Issue on bio-hybrid systems and living machines. Biomed. Microdevices 2012, 14, 965–967. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y.; Zhang, L. Recent progress on micro- and nano-robots: Towards in vivo tracking and localization. Quant. Imaging Med. Surg. 2018, 8, 461–479. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Li, Z.; Yu, W.; Li, K.; Xie, Z. Development of a Biomedical Micro/Nano Robot for Drug Delivery. J. Nanosci. Nanotechnol. 2015, 15, 3126–3129. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Xiong, Z.; Wang, J.; Tang, J.; Li, D. Light hybrid micro/nano-robots: From propulsion to functional signals. Nano Res. 2022, 15, 5355–5375. [Google Scholar]
- Li, M.; Liu, L.; Xi, N.; Wang, Y. Applications of Micro/Nano Automation Technology in Detecting Cancer Cells for Personalized Medicine. IEEE Trans. Nanotechnol. 2017, 16, 217–229. [Google Scholar] [CrossRef]
- Lv, Y.; Pu, R.; Tao, Y.; Yang, X.; Mu, H.; Wang, H.; Sun, W. Applications and Future Prospects of Micro/Nanorobots Utilizing Diverse Biological Carriers. Micromachines 2023, 14, 983. [Google Scholar] [CrossRef]
- Xie, S.; Jiao, N.; Xue, Y.; Dai, L.; Chen, F. Transporting and rotating of microstructures actuated by algal microrobots. In Proceedings of the 2021 IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-NANO), Xi’an, China, 2–6 August 2021; pp. 86–89. [Google Scholar]
- Kim, J.; Park, H.; Yoon, C. Advances in Biodegradable Soft Robots. Polymers 2022, 14, 4574. [Google Scholar] [CrossRef] [PubMed]
- Shin, Y.-K.; Shin, Y.; Lee, J.W.; Seo, M.-H. Micro-/Nano-Structured Biodegradable Pressure Sensors for Biomedical Applications. Biosensors 2022, 12, 952. [Google Scholar]
- Maher, S.; Kumeria, T.; Wang, Y.; Kaur, G.; Fathalla, D.; Fetih, G.; Santos, A.; Habib, F.; Evdokiou, A.; Losic, D. From The Mine to Cancer Therapy: Natural and Biodegradable Theranostic Silicon Nanocarriers from Diatoms for Sustained Delivery of Chemotherapeutics. Adv. Healthc. Mater. 2016, 5, 2667–2678. [Google Scholar] [CrossRef]
- Zhong, D.N.; Zhang, D.X.; Chen, W.; He, J.; Ren, C.J.; Zhang, X.C.; Kong, N.; Tao, W.; Zhou, M. Orally deliverable strategy based on microalgal biomass for intestinal disease treatment. Sci. Adv. 2021, 7, 14. [Google Scholar] [CrossRef]
- Garvin, K.A.; Hocking, D.C.; Dalecki, D. Controlling the Spatial Organization of Cells and Extracellular Matrix Proteins in Engineered Tissues Using Ultrasound Standing Wave Fields. Ultrasound Med. Biol. 2010, 36, 1919–1932. [Google Scholar] [CrossRef]
- Shivalkar, S.; Chowdhary, P.; Afshan, T.; Chaudhary, S.; Roy, A.; Samanta, S.K.; Sahoo, A.K. Nanoengineering of biohybrid micro/nanobots for programmed biomedical applications. Colloids Surf. B 2023, 222, 113054. [Google Scholar] [CrossRef]
- Slomovic, S.; Pardee, K.; Collins, J.J. Synthetic biology devices for in vitro and in vivo diagnostics. Proc. Natl. Acad. Sci. USA 2015, 112, 14429–14435. [Google Scholar] [CrossRef] [PubMed]
- Urso, M.; Ussia, M.; Pumera, M. Smart micro- and nanorobots for water purification. Nat. Rev. Bioeng. 2023, 1, 236–251. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Zhang, C.; Wang, X.D.; Wang, W.X.; Xi, N.; Liu, L.Q. Development of micro- and nanorobotics: A review. Sci. China Technol. Sci. 2019, 62, 1–20. [Google Scholar] [CrossRef]
- Mathur, D.; Bhatia, D. Bio-propulsion Techniques for Bio-micro/nano-Robots. In Intelligent Learning for Computer Vision: Proceedings of the Congress on Intelligent Systems 2020; Springer: Singapore, 2021; pp. 431–439. [Google Scholar]
- Meisami, A.H.; Abbasi, M.; Mosleh-Shirazi, S.; Azari, A.; Amani, A.M.; Vaez, A.; Golchin, A. Self-propelled micro/nanobots: A new insight into precisely targeting cancerous cells through intelligent and deep cancer penetration. Eur. J. Pharmacol. 2022, 926, 175011. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Xu, Z.; Zhu, B.; Zhang, Y.; Lin, J.; Wu, Y.; Wu, D. Design, fabrication and application of magnetically actuated micro/nanorobots: A review. Nanotechnology 2022, 33, 152001. [Google Scholar] [CrossRef]
- Zhao, C.; Ou, H.; Shi, L.; Wei, Y.; Qian, F.; Lu, X. Reversible Swarming of Micro Robots Controlled by Acoustic Field. In Proceedings of the 2022 16th Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Nanjing, China, 10–14 October 2022; pp. 47–50. [Google Scholar]
- Pyo, J.; Yoon, S.; Vania, M.; Lee, D. Three Dimensional Microrobot Tracking Using Learning-based System. Int. J. Control Autom. Syst. 2020, 18, 21–28. [Google Scholar]
- Xu, T.Q.; Zhang, J.C.; Salehizadeh, M.; Onaizah, O.; Diller, E. Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Sci. Robot. 2019, 4, eaav4494. [Google Scholar] [CrossRef] [PubMed]
- Ezzat, D.; Amin, S.; Shedeed, H.A.; Tolba, M.F. A New Nano-robots Control Strategy for Killing Cancer Cells Using Quorum Sensing Technique and Directed Particle Swarm Optimization Algorithm. In Proceedings of the International Conference on Advanced Machine Learning Technologies and Applications (AMLTA2019), Cairo, Egypt, 28–30 March 2019; Springer International Publishing: Cham, Switzerland, 2020; pp. 218–226. [Google Scholar]
- Ezzat, D.; Amin, S.E.S.; Shedeed, H.A.; Tolba, M.F. Directed Particle Swarm Optimization Technique for Delivering Nano-robots to Cancer Cells. In Proceedings of the 2018 13th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 18–19 December 2018; pp. 80–84. [Google Scholar]
- Liming, Z.; Changqing, L.; Chengtao, R.; Jiaying, Y. Review and Prospect of Medical Magnetic-Driven Micro-Nano Robots Based on Equipment Maintenance Concept. In Proceedings of the 2020 IEEE 3rd International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 27–29 September 2020; pp. 387–392. [Google Scholar]
- Lyu, T. An Exploration of Application of Micro/Nano Robots in Tumor Treatment. In Proceedings of the 2021 1st International Conference on Control and Intelligent Robotics, Guangzhou, China, 18–20 June 2021; pp. 710–714. [Google Scholar]
- Mertz, L. Tiny Conveyance: Micro- and Nanorobots Prepare to Advance Medicine. IEEE Pulse 2018, 9, 19–23. [Google Scholar] [CrossRef]
- Singh, A.V.; Sitti, M. Patterned and Specific Attachment of Bacteria on Biohybrid Bacteria-Driven Microswimmers. Adv. Healthc. Mater. 2016, 5, 2325–2331. [Google Scholar] [CrossRef]
- Singh, A.V.; Hosseinidoust, Z.; Park, B.W.; Yasa, O.; Sitti, M. Microemulsion-Based Soft Bacteria-Driven Microswimmers for Active Cargo Delivery. ACS Nano 2017, 11, 9759–9769. [Google Scholar] [CrossRef] [PubMed]
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for Minimally Invasive Medicine. In Annual Review of Biomedical Engineering; Yarmush, M.L., Duncan, J.S., Gray, M.L., Eds.; Annual Reviews: Palo Alto, CA, USA, 2010; Volume 12, pp. 55–85. [Google Scholar]
- Weibel, D.B.; Garstecki, P.; Ryan, D.; Diluzio, W.R.; Mayer, M.; Seto, J.E.; Whitesides, G.M. Microoxen: Microorganisms to move microscale loads. Proc. Natl. Acad. Sci. USA 2005, 102, 11963–11967. [Google Scholar] [CrossRef] [PubMed]
- Xie, S.X.; Jiao, N.D.; Tung, S.; Liu, L.Q. Controlled regular locomotion of algae cell microrobots. Biomed. Microdevices 2016, 18, 9. [Google Scholar] [CrossRef]
- Yan, X.H.; Zhou, Q.; Vincent, M.; Deng, Y.; Yu, J.F.; Xu, J.B.; Xu, T.T.; Tang, T.; Bian, L.M.; Wang, Y.X.J.; et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017, 2, 14. [Google Scholar] [CrossRef]
- Zhang, F.Y.; Li, Z.X.; Duan, Y.; Abbas, A.; Mundaca-Uribe, R.; Yin, L.; Luan, H.; Gao, W.W.; Fang, R.H.; Zhang, L.F.; et al. Gastrointestinal tract drug delivery using algae motors embedded in a degradable capsule. Sci. Robot. 2022, 7, 12. [Google Scholar] [CrossRef]
- Akolpoglu, M.B.; Dogan, N.O.; Bozuyuk, U.; Ceylan, H.; Kizilel, S.; Sitti, M. High-Yield Production of Biohybrid Microalgae for On-Demand Cargo Delivery. Adv. Sci. 2020, 7, 10. [Google Scholar] [CrossRef] [PubMed]
- Qiao, Y.; Yang, F.; Xie, T.T.; Du, Z.; Zhong, D.N.; Qi, Y.C.; Li, Y.Y.; Li, W.L.; Lu, Z.M.; Rao, J.H.; et al. Engineered algae: A novel oxygen-generating system for effective treatment of hypoxic cancer. Sci. Adv. 2020, 6, 12. [Google Scholar] [CrossRef] [PubMed]
- Jimenez-Jimenez, C.; Moreno, V.M.; Vallet-Regi, M. Bacteria-Assisted Transport of Nanomaterials to Improve Drug Delivery in Cancer Therapy. Nanomaterials 2022, 12, 288. [Google Scholar] [CrossRef]
- Park, B.W.; Zhuang, J.; Yasa, O.; Sitti, M. Multifunctional Bacteria-Driven Microswimmers for Targeted Active Drug Delivery. ACS Nano 2017, 11, 8910–8923. [Google Scholar] [CrossRef]
- Wu, Z.; de Avila, B.E.F.; Martin, A.; Christianson, C.; Gao, W.W.; Thamphiwatana, S.K.; Escarpa, A.; He, Q.; Zhang, L.F.; Wang, J. RBC micromotors carrying multiple cargos towards potential theranostic applications. Nanoscale 2015, 7, 13680–13686. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.F.; Medina-Sanchez, M.; Magdanz, V.; Schwarz, L.; Hebenstreit, F.; Schmidt, O.G. Sperm-Hybrid Micromotor for Targeted Drug Delivery. ACS Nano 2018, 12, 327–337. [Google Scholar] [CrossRef] [PubMed]
- Shao, J.X.; Xuan, M.J.; Zhang, H.Y.; Lin, X.K.; Wu, Z.G.; He, Q. Chemotaxis-Guided Hybrid Neutrophil Micromotors for Targeted Drug Transport. Angew. Chem. Int. Edit. 2017, 56, 12935–12939. [Google Scholar] [CrossRef]
- Liu, J.; Chen, F. Biology and Industrial Applications of Chlorella: Advances and Prospects. In Microalgae Biotechnology; Advances in Biochemical, Engineering-Biotechnology; Posten, C., Chen, S.F., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; Volume 153, pp. 1–35. [Google Scholar]
- Bedirli, A.; Kerem, M.; Ofluoglu, E.; Salman, B.; Katircioglu, H.; Bedirli, N.; Yilmazer, D.; Alper, M.; Pasaoglu, H. Administration of Chlorella sp. microalgae reduces endotoxemia, intestinal oxidative stress and bacterial translocation in experimental biliary obstruction. Clin. Nutr. 2009, 28, 674–678. [Google Scholar] [CrossRef]
- Tanaka, K.; Koga, T.; Konishi, F.; Nakamura, M.; Mitsuyama, M.; Himeno, K.; Nomoto, K. Augmentation of host defense by a unicellular green alga, Chlorella vulgaris, to Escherichia coli infection. Infect. Immun. 1986, 53, 267–271. [Google Scholar] [CrossRef]
- Chu, M.Q.; Li, H.K.; Wu, Q.; Wo, F.J.; Shi, D.L. Pluronic-encapsulated natural chlorophyll nanocomposites for in vivo cancer imaging and photothermal/photodynamic therapies. Biomaterials 2014, 35, 8357–8373. [Google Scholar] [CrossRef] [PubMed]
- Zhong, D.N.; Li, W.L.; Qi, Y.C.; He, J.; Zhou, M. Photosynthetic Biohybrid Nanoswimmers System to Alleviate Tumor Hypoxia for FL/PA/MR Imaging-Guided Enhanced Radio-Photodynamic Synergetic Therapy. Adv. Funct. Mater. 2020, 30, 11. [Google Scholar] [CrossRef]
- Lewin, R.A. The diatoms—Biology and morphology of the genera. Nature 1990, 346, 619–620. [Google Scholar] [CrossRef]
- Maher, S.; Kumeria, T.; Aw, M.S.; Losic, D. Diatom Silica for Biomedical Applications: Recent Progress and Advances. Adv. Healthc. Mater. 2018, 7, 19. [Google Scholar] [CrossRef]
- Phogat, S.; Saxena, A.; Kapoor, N.; Aggarwal, C.; Tiwari, A. Diatom mediated smart drug delivery system. J. Drug Deliv. Sci. Technol. 2021, 63, 11. [Google Scholar] [CrossRef]
- Felgner, S.; Kocijancic, D.; Frahm, M.; Weiss, S. Bacteria in Cancer Therapy: Renaissance of an Old Concept. Int. J. Microbiol. 2016, 2016, 8451728. [Google Scholar] [CrossRef]
- Li, Z.T.; Wang, Y.X.; Liu, J.; Rawding, P.; Bu, J.Y.; Hong, S.P.; Hu, Q.Y. Chemically and Biologically Engineered Bacteria-Based Delivery Systems for Emerging Diagnosis and Advanced Therapy. Adv. Mater. 2021, 33, 29. [Google Scholar] [CrossRef]
- Carlsen, R.W.; Sitti, M. Bio-Hybrid Cell-Based Actuators for Microsystems. Small 2014, 10, 3831–3851. [Google Scholar] [CrossRef]
- Mostaghaci, B.; Yasa, O.; Zhuang, J.; Sitti, M. Bioadhesive Bacterial Microswimmers for Targeted Drug Delivery in the Urinary and Gastrointestinal Tracts. Adv. Sci. 2017, 4, 9. [Google Scholar] [CrossRef] [PubMed]
- Alapan, Y.; Yasa, O.; Schauer, O.; Giltinan, J.; Tabak, A.F.; Sourjik, V.; Sitti, M. Soft erythrocyte-based bacterial microswimmers for cargo delivery. Sci. Robot. 2018, 3, 10. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.-R.; Yoshinaga, N.; Sano, M. Active Motion of a Janus Particle by Self-Thermophoresis in a Defocused Laser Beam. Phys. Rev. Lett. 2010, 105, 268302. [Google Scholar] [CrossRef]
- Dehaini, D.; Fang, R.H.; Zhang, L.F. Biomimetic strategies for targeted nanoparticle delivery. Bioeng. Transl. Med. 2016, 1, 30–46. [Google Scholar] [CrossRef] [PubMed]
- Rivas, D.; Mallick, S.; Sokolich, M.; Das, S. Cellular Manipulation Using Rolling Microrobots. In Proceedings of the 2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Toronto, ON, Canada, 25–29 July 2022; pp. 1–6. [Google Scholar]
- Bakenecker, A.C.; von Gladiss, A.; Schwenke, H.; Behrends, A.; Friedrich, T.; Ludtke-Buzug, K.; Neumann, A.; Barkhausen, J.; Wegner, F.; Buzug, T.M. Navigation of a magnetic micro-robot through a cerebral aneurysm phantom with magnetic particle imaging. Sci. Rep. 2021, 11, 12. [Google Scholar] [CrossRef]
- Solovev, A.A.; Xi, W.; Gracias, D.H.; Harazim, S.M.; Deneke, C.; Sanchez, S.; Schmidt, O.G. Self-Propelled Nanotools. ACS Nano 2012, 6, 1751–1756. [Google Scholar] [CrossRef]
- Campuzano, S.; de Ávila, B.E.F.; Yáñez-Sedeño, P.; Pingarrón, J.M.; Wang, J. Nano/microvehicles for efficient delivery and (bio)sensing at the cellular level. Chem. Sci. 2017, 8, 6750–6763. [Google Scholar] [CrossRef]
- Fliervoet, L.A.L.; Mastrobattista, E. Drug delivery with living cells. Adv. Drug Deliv. Rev. 2016, 106, 63–72. [Google Scholar] [CrossRef]
- Magnani, M.; Rossi, L. Approaches to erythrocyte-mediated drug delivery. Expert Opin. Drug Deliv. 2014, 11, 677–687. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.G.; Li, T.L.; Li, J.X.; Gao, W.; Xu, T.L.; Christianson, C.; Gao, W.W.; Galarnyk, M.; He, Q.; Zhang, L.F.; et al. Turning Erythrocytes into Functional Micromotors. ACS Nano 2014, 8, 12041–12048. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.F.; Medina-Sanchez, M.; Zhang, W.N.; Seaton, M.P.H.; Brison, D.R.; Edmondson, R.J.; Taylor, S.S.; Nelson, L.; Zeng, K.; Bagley, S.; et al. Human spermbots for patient-representative 3D ovarian cancer cell treatment. Nanoscale 2020, 12, 20467–20481. [Google Scholar] [CrossRef]
- Magdanz, V.; Khalil, I.S.M.; Simmchen, J.; Furtado, G.P.; Mohanty, S.; Gebauer, J.; Xu, H.F.; Klingner, A.; Aziz, A.; Medina-Sanchez, M.; et al. IRONSperm: Sperm-templated soft magnetic microrobots. Sci. Adv. 2020, 6, 15. [Google Scholar] [CrossRef]
- Magdanz, V.; Sanchez, S.; Schmidt, O.G. Development of a Sperm-Flagella Driven Micro-Bio-Robot. Adv. Mater. 2013, 25, 6581–6588. [Google Scholar] [CrossRef]
- Celi, N.; Gong, D.; Cai, J. Artificial flexible sperm-like nanorobot based on self-assembly and its bidirectional propulsion in precessing magnetic fields. Sci. Rep. 2021, 11, 11. [Google Scholar] [CrossRef] [PubMed]
- Kolaczkowska, E.; Kubes, P. Neutrophil recruitment and function in health and inflammation. Nat. Rev. Immunol. 2013, 13, 159–175. [Google Scholar] [CrossRef]
- Gorantla, S.; Dou, H.Y.; Boska, M.; Destache, C.J.; Nelson, J.; Poluektova, L.; Rabinow, B.E.; Gendelman, H.E.; Mosley, R.L. Quantitative magnetic resonance and SPECT imaging for macrophage tissue migration and nanoformulated drug delivery. J. Leukoc. Biol. 2006, 80, 1165–1174. [Google Scholar] [CrossRef]
- Richards, D.M.; Hettinger, J.; Feuerer, M. Monocytes and macrophages in cancer: Development and functions. Cancer Microenviron. ICMS 2013, 6, 179–191. [Google Scholar] [CrossRef]
- Dou, H.Y.; Grotepas, C.B.; McMillan, J.M.; Destache, C.J.; Chaubal, M.; Werling, J.; Kipp, J.; Rabinow, B.; Gendelman, H.E. Macrophage Delivery of Nanoformulated Antiretroviral Drug to the Brain in a Murine Model of NeuroAIDS. J. Immunol. 2009, 183, 661–669. [Google Scholar] [CrossRef]
- Munerati, M.; Cortesi, R.; Ferrari, D.; Divirgilio, F.; Nastruzzi, C. Macrophages loaded with doxorubicin by ATP-mediated permeabilization-potential carriers for antitumor therapy. Biochim. Biophys. Acta Mol. Cell Res. 1994, 1224, 269–276. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.H.; Park, O.K.; Kim, J.; Shin, K.; Pack, C.G.; Kim, K.; Ko, G.; Lee, N.; Kwon, S.H.; Hyeon, T. Deep Tumor Penetration of Drug-Loaded Nanoparticles by Click Reaction-Assisted Immune Cell Targeting Strategy. J. Am. Chem. Soc. 2019, 141, 13829–13840. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.Q.; Vecchio, D.; Wang, C.Y.; Emre, A.; Xiao, X.Y.; Jiang, Z.X.; Bogdan, P.; Huang, Y.D.; Kotov, N.A. Biomorphic structural batteries for robotics. Sci. Robot. 2020, 5, 9. [Google Scholar] [CrossRef] [PubMed]
- Mao, G.Y.; Schiller, D.; Danninger, D.; Hailegnaw, B.; Hartmann, F.; Stockinger, T.; Drack, M.; Arnold, N.; Kaltenbrunner, M. Ultrafast small-scale soft electromagnetic robots. Nat. Commun. 2022, 13, 11. [Google Scholar] [CrossRef]
- Gerena, E.; Legendre, F.; Vitry, Y.; Regnier, S.; Haliyo, S. Robotic Optical-micromanipulation Platform for Teleoperated Single-Cell Manipulation. In Proceedings of the 4th International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Helsinki, Finland, 1–5 July 2019. [Google Scholar]
- Hu, W.Q.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Ichikawa, A.; Sakuma, S.; Shoda, T.; Arai, F.; Akagi, S. On-chip enucleation of oocyte using untetherd micro-robot with gripping mechanism. In Proceedings of the International Symposium on Micro-NanoMechatronics and Human Science (MHS), Nagoya, Japan, 10–13 November 2013. [Google Scholar]
- Leveziel, M.; Haouas, W.; Laurent, G.J.; Gauthier, M.; Dahmouche, R. MiGriBot: A miniature parallel robot with integrated gripping for high-throughput micromanipulation. Sci. Robot. 2022, 7, 10. [Google Scholar] [CrossRef]
- Sinatra, N.R.; Teeple, C.B.; Vogt, D.M.; Parker, K.K.; Gruber, D.F.; Wood, R.J. Ultragentle manipulation of delicate structures using a soft robotic gripper. Sci. Robot. 2019, 4, 11. [Google Scholar] [CrossRef]
- Lu, H.J.; Zhang, M.; Yang, Y.Y.; Huang, Q.; Fukuda, T.; Wang, Z.K.; Shen, Y.J. A bioinspired multilegged soft millirobot that functions in both dry and wet conditions. Nat. Commun. 2018, 9, 7. [Google Scholar] [CrossRef]
- Wu, Y.D.; Dong, X.G.; Kim, J.K.; Wang, C.X.; Sitti, M. Wireless soft millirobots for climbing three-dimensional surfaces in confined spaces. Sci. Adv. 2022, 8, 16. [Google Scholar] [CrossRef]
- Yang, X.F.; Chang, L.L.; Perez-Arancibia, N.O. An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle. Sci. Robot. 2020, 5, 13. [Google Scholar] [CrossRef]
- Yang, X.; Shang, W.F.; Lu, H.J.; Liu, Y.T.; Yang, L.; Tan, R.; Wu, X.Y.; Shen, Y.J. An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedical applications. Sci. Robot. 2020, 5, 12. [Google Scholar] [CrossRef]
- Won, S.; Lee, H.E.; Cho, Y.S.; Yang, K.; Park, J.E.; Yang, S.J.; Wie, J.J. Multimodal collective swimming of magnetically articulated modular nanocomposite robots. Nat. Commun. 2022, 13, 11. [Google Scholar] [CrossRef]
- Huang, H.W.; Uslu, F.E.; Katsamba, P.; Lauga, E.; Sakar, M.S.; Nelson, B.J. Adaptive locomotion of artificial microswimmers. Sci. Adv. 2019, 5, 7. [Google Scholar] [CrossRef] [PubMed]
- Son, D.; Ugurlu, M.C.; Sitti, M. Permanent magnet array-driven navigation of wireless millirobots inside soft tissues. Sci. Adv. 2021, 7, eabi8932. [Google Scholar] [CrossRef] [PubMed]
- Mahoney, A.W.; Abbott, J.J. Five-degree-of-freedom manipulation of an untethered magnetic device in fluid using a single permanent magnet with application in stomach capsule endoscopy. Int. J. Robot. Res. 2016, 35, 129–147. [Google Scholar] [CrossRef]
- Ryan, P.; Diller, E. Magnetic Actuation for Full Dexterity Microrobotic Control Using Rotating Permanent Magnets. IEEE Trans. Robot. 2017, 33, 1398–1409. [Google Scholar] [CrossRef]
- Servant, A.; Qiu, F.M.; Mazza, M.; Kostarelos, K.; Nelson, B.J. Controlled In Vivo Swimming of a Swarm of Bacteria-Like Microrobotic Flagella. Adv. Mater. 2015, 27, 2981–2988. [Google Scholar] [CrossRef]
- Yu, J.F.; Jin, D.D.; Chan, K.F.; Wang, Q.Q.; Yuan, K.; Zhang, L. Active generation and magnetic actuation of microrobotic swarms in bio-fluids. Nat. Commun. 2019, 10, 12. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Gong, D.; Celi, N.; Xu, J.J.; Zhang, D.Y.; Cai, J. Biohybrid magnetic microrobots for enhanced photocatalytic RhB degradation and E. coli inactivation under visible light irradiation. Appl. Surf. Sci. 2022, 579, 9. [Google Scholar] [CrossRef]
- Xu, T.T.; Hwang, G.; Andreff, N.; Regnier, S. Planar Path Following of 3-D Steering Scaled-Up Helical Microswimmers. IEEE Trans. Robot. 2015, 31, 117–127. [Google Scholar] [CrossRef]
- Schuerle, S.; Erni, S.; Flink, M.; Kratochvil, B.E.; Nelson, B.J. Three-Dimensional Magnetic Manipulation of Micro- and Nanostructures for Applications in Life Sciences. IEEE Trans. Magn. 2013, 49, 321–330. [Google Scholar] [CrossRef]
- Alapan, Y.; Bozuyuk, U.; Erkoc, P.; Karacakol, A.C.; Sitti, M. Multifunctional surface microrollers for targeted cargo delivery in physiological blood flow. Sci. Robot. 2020, 5, 10. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Gao, H.; Liu, K.; Lei, D.; Pei, K.; Hu, G. A review on particle assembly in standing wave acoustic field. J. Nanopart. Res. 2022, 24, 81. [Google Scholar] [CrossRef]
- Ding, X.Y.; Lin, S.C.S.; Kiraly, B.; Yue, H.J.; Li, S.X.; Chiang, I.K.; Shi, J.J.; Benkovic, S.J.; Huang, T.J. On-chip manipulation of single microparticles, cells, and organisms using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2012, 109, 11105–11109. [Google Scholar] [CrossRef]
- Han, J.L.; Hu, H.; Huang, Q.Y.; Lei, Y.L. Particle separation by standing surface acoustic waves inside a sessile droplet. Sens. Actuator A Phys. 2021, 326, 112731. [Google Scholar] [CrossRef]
- Jooss, V.M.; Bolten, J.S.; Huwyler, J.; Ahmed, D. In vivo acoustic manipulation of microparticles in zebrafish embryos. Sci. Adv. 2022, 8, eabm2785. [Google Scholar] [CrossRef]
- Maramizonouz, S.; Jia, C.; Rahmati, M.; Zheng, T.; Liu, Q.; Torun, H.; Wu, Q.; Fu, Y. Acoustofluidic Patterning inside Capillary Tubes Using Standing Surface Acoustic Waves. Int. J. Mech. Sci. 2022, 214, 106893. [Google Scholar] [CrossRef]
- Leshno, A.; Kenigsberg, A.; Peleg-Levy, H.; Piperno, S.; Skaat, A.; Shpaisman, H. Acoustic Manipulation of Intraocular Particles. Micromachines 2022, 13, 1362. [Google Scholar] [CrossRef]
- Chiou, P.Y.; Ohta, A.T.; Wu, M.C. Massively parallel manipulation of single cells and microparticles using optical images. Nature 2005, 436, 370–372. [Google Scholar] [CrossRef]
- Neuman, K.C.; Nagy, A. Single-molecule force spectroscopy: Optical tweezers, magnetic tweezers and atomic force microscopy. Nat. Methods 2008, 5, 491–505. [Google Scholar] [CrossRef]
- Guo, F.; Mao, Z.M.; Chen, Y.C.; Xie, Z.W.; Lata, J.P.; Li, P.; Ren, L.Q.; Liu, J.Y.; Yang, J.; Dao, M.; et al. Three-dimensional manipulation of single cells using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2016, 113, 1522–1527. [Google Scholar] [CrossRef]
- Marzo, A.; Seah, S.A.; Drinkwater, B.W.; Sahoo, D.R.; Long, B.; Subramanian, S. Holographic acoustic elements for manipulation of levitated objects. Nat. Commun. 2015, 6, 8661. [Google Scholar] [CrossRef]
- Zhang, R.Q.; Guo, H.L.; Deng, W.Y.; Huang, X.Q.; Li, F.; Lu, J.Y.; Liu, Z.Y. Acoustic tweezers and motor for living cells. Appl. Phys. Lett. 2020, 116, 123503. [Google Scholar] [CrossRef]
- Hong, Z.; Zhang, J.; Drinkwater, B.W. Observation of Orbital Angular Momentum Transfer from Bessel-Shaped Acoustic Vortices to Diphasic Liquid-Microparticle Mixtures. Phys. Rev. Lett. 2015, 114, 214301. [Google Scholar] [CrossRef]
- Cox, L.; Croxford, A.; Drinkwater, B.W.; Marzo, A. Acoustic Lock: Position and orientation trapping of non-spherical sub-wavelength particles in mid-air using a single-axis acoustic levitator. Appl. Phys. Lett. 2018, 113, 054101. [Google Scholar] [CrossRef]
- Yang, Y.; Ma, T.; Zhang, Q.; Huang, J.; Hu, Q.; Li, Y.; Wang, C.; Zheng, H. 3D Acoustic Manipulation of Living Cells and Organisms Based on 2D Array. IEEE. Trans. Biomed. Eng. 2022, 69, 2342–2352. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Han, J.; Go, G.; Zhen, J.; Zheng, S.; Le, V.H.; Park, J.-O.; Park, S. Feasibility study of dual-targeting paclitaxel-loaded magnetic liposomes using electromagnetic actuation and macrophages. Sens. Actuators B Chem. 2017, 240, 1226–1236. [Google Scholar] [CrossRef]
- Cao, H.X.; Nguyen, V.D.; Jung, D.; Choi, E.; Kim, C.S.; Park, J.O.; Kang, B. Acoustically Driven Cell-Based Microrobots for Targeted Tumor Therapy. Pharmaceutics 2022, 14, 2143. [Google Scholar] [CrossRef]
- Baudoin, M.; Gerbedoen, J.C.; Riaud, A.; Matar, O.B.; Smagin, N.; Thomas, J.L. Folding a focalized acoustical vortex on a flat holographic transducer: Miniaturized selective acoustical tweezers. Sci. Adv. 2019, 5, eaav1967. [Google Scholar] [CrossRef]
- Baudoin, M.; Thomas, J.-L.; Sahely, R.A.; Gerbedoen, J.-C.; Gong, Z.; Sivery, A.; Matar, O.B.; Smagin, N.; Favreau, P.; Vlandas, A. Spatially selective manipulation of cells with single-beam acoustical tweezers. Nat. Commun. 2020, 11, 4244. [Google Scholar] [CrossRef] [PubMed]
- Ao, Z.; Cai, H.W.; Wu, Z.H.; Ott, J.; Wang, H.L.; Mackie, K.; Guo, F. Controllable fusion of human brain organoids using acoustofluidics. Lab Chip 2021, 21, 688–699. [Google Scholar] [CrossRef]
- Dillinger, C.; Nama, N.; Ahmed, D. Ultrasound-activated ciliary bands for microrobotic systems inspired by starfish. Nat. Commun. 2021, 12, 6455. [Google Scholar] [CrossRef]
- Luo, T.; Wu, M. Biologically inspired micro-robotic swimmers remotely controlled by ultrasound waves. Lab Chip 2021, 21, 4095–4103. [Google Scholar] [CrossRef] [PubMed]
- Jekely, G. Evolution of phototaxis. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 2795–2808. [Google Scholar] [CrossRef] [PubMed]
- Jekely, G.; Colombelli, J.; Hausen, H.; Guy, K.; Stelzer, E.; Nedelec, F.; Arendt, D. Mechanism of phototaxis in marine zooplankton. Nature 2008, 456, 395–399. [Google Scholar] [CrossRef] [PubMed]
- Xie, S.X.; Qin, L.L.; Li, G.X.; Jiao, N.A.D. Robotized algal cells and their multiple functions. Soft Matter 2021, 17, 3047–3054. [Google Scholar] [CrossRef]
- Wu, Z.G.; Si, T.Y.; Gao, W.; Lin, X.K.; Wang, J.; He, Q. Superfast Near-Infrared Light-Driven Polymer Multilayer Rockets. Small 2016, 12, 577–582. [Google Scholar] [CrossRef]
- Qian, B.; Montiel, D.; Bregulla, A.; Cichos, F.; Yang, H. Harnessing thermal fluctuations for purposeful activities: The manipulation of single micro-swimmers by adaptive photon nudging. Chem. Sci. 2013, 4, 1420–1429. [Google Scholar] [CrossRef]
- Wang, X.L.; Chen, S.X.; Kong, M.; Wang, Z.K.; Costa, K.D.; Li, R.A.; Sun, D. Enhanced cell sorting and manipulation with combined optical tweezer and microfluidic chip technologies. Lab Chip 2011, 11, 3656–3662. [Google Scholar] [CrossRef]
- Bruns, T.; Becsi, L.; Talkenberg, M.; Wagner, M.; Weber, P.; Mescheder, U.; Schneckenburger, H. Microfluidic system for single cell sorting with optical tweezers. In Proceedings of the Conference on Laser Applications in Life Sciences, Oulu, Finland, 9–11 June 2010. [Google Scholar]
- Li, Y.; Guo, Z.Y.; Qu, S.L. Living cell manipulation in a microfluidic device by femtosecond optical tweezers. Opt. Lasers Eng. 2014, 55, 150–154. [Google Scholar] [CrossRef]
- Ma, B.H.; Yao, B.L.; Peng, F.; Yan, S.H.; Lei, M.; Rupp, R. Optical sorting of particles by dual-channel line optical tweezers. J. Opt. 2012, 14, 5. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Zhang, Y.X.; Hu, C.Z.; Liu, Z.H.; Yang, X.H.; Zhang, J.Z.; Yang, J.; Yuan, L.B. HACF-based optical tweezers available for living cells manipulating and sterile transporting. Opt. Commun. 2018, 427, 563–566. [Google Scholar] [CrossRef]
- Khokhlova, M.D.; Lyubin, E.V.; Zhdanov, A.G.; Rykova, S.Y.; Sokolova, I.A.; Fedyanin, A.A. Normal and system lupus erythematosus red blood cell interactions studied by double trap optical tweezers: Direct measurements of aggregation forces. J. Biomed. Opt. 2012, 17, 5. [Google Scholar] [CrossRef]
- Paul, A.; Padmapriya, P.; Natarajan, V. Diagnosis of malarial infection using change in properties of optically trapped red blood cells. Biomed. J. 2017, 40, 101–105. [Google Scholar] [CrossRef]
- Lin, J.Y.; Shao, L.D.; Qiu, S.F.; Huang, X.W.; Liu, M.M.; Zheng, Z.C.; Lin, D.; Xu, Y.L.; Li, Z.H.; Lin, Y.; et al. Application of a near-infrared laser tweezers Raman spectroscopy system for label-free analysis and differentiation of diabetic red blood cells. Biomed. Opt. Express 2018, 9, 984–993. [Google Scholar] [CrossRef]
- Nagai, M.; Hirano, T.; Shibata, T. Phototactic Algae-Driven Unidirectional Transport of Submillimeter-Sized Cargo in a Microchannel. Micromachines 2019, 10, 12. [Google Scholar] [CrossRef]
- Li, D.F.; Liu, C.; Yang, Y.Y.; Wang, L.D.; Shen, Y.J. Micro-rocket robot with all-optic actuating and tracking in blood. Light-Sci. Appl. 2020, 9, 10. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.S.; Xuan, C.; Qian, X.S.; Alsaid, Y.; Hua, M.T.; Jin, L.H.; He, X.M. Soft phototactic swimmer based on self-sustained hydrogel oscillator. Sci. Robot. 2019, 4, 10. [Google Scholar] [CrossRef]
- Dai, B.H.; Wang, J.Z.; Xiong, Z.; Zhan, X.J.; Dai, W.; Li, C.C.; Feng, S.P.; Tang, J.Y. Programmable artificial phototactic microswimmer. Nat. Nanotechnol. 2016, 11, 1087–1092. [Google Scholar] [CrossRef]
- Huang, C.L.; Lv, J.A.; Tian, X.J.; Wang, Y.C.; Yu, Y.L.; Liu, J. Miniaturized Swimming Soft Robot with Complex Movement Actuated and Controlled by Remote Light Signals. Sci. Rep. 2015, 5, 8. [Google Scholar] [CrossRef]
- Yu, Y.L.; Nakano, M.; Ikeda, T. Directed bending of a polymer film by light—Miniaturizing a simple photomechanical system could expand its range of applications. Nature 2003, 425, 145. [Google Scholar] [CrossRef]
- Majidi, C. Soft Robotics: A Perspective-Current Trends and Prospects for the Future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Hu, W.Q.; Ishii, K.S.; Ohta, A.T. Micro-Assembly Using Optically Controlled Bubble Microrobots in Saline Solution. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St. Paul, MN, USA, 14–18 May 2012; pp. 733–738. [Google Scholar]
- Wang, Q.L.; Dong, R.F.; Wang, C.; Xu, S.Y.; Chen, D.C.; Liang, Y.Y.; Ren, B.Y.; Gao, W.; Cai, Y.P. Glucose-Fueled Micromotors with Highly Efficient Visible-Light Photocatalytic Propulsion. Acs Appl. Mater. Interfaces 2019, 11, 6201–6207. [Google Scholar] [CrossRef] [PubMed]
- Dong, R.F.; Zhang, Q.L.; Gao, W.; Pei, A.; Ren, B.Y. Highly Efficient Light-Driven TiO2-Au Janus Micromotors. ACS Nano 2016, 10, 839–844. [Google Scholar] [CrossRef]
- Kong, L.; Mayorga-Martinez, C.C.; Guan, J.G.; Pumera, M. Photocatalytic Micromotors Activated by UV to Visible Light for Environmental Remediation, Micropumps, Reversible Assembly, Transportation, and Biomimicry. Small 2020, 16, 14. [Google Scholar] [CrossRef]
- Dong, R.F.; Hu, Y.; Wu, Y.F.; Gao, W.; Ren, B.Y.; Wang, Q.L.; Cai, Y.P. Visible-Light-Driven BiOI-Based Janus Micromotor in Pure Water. J. Am. Chem. Soc. 2017, 139, 1722–1725. [Google Scholar] [CrossRef]
- Ibele, M.; Mallouk, T.E.; Sen, A. Schooling Behavior of Light-Powered Autonomous Micromotors in Water. Angew. Chem. Int. Edit. 2009, 48, 3308–3312. [Google Scholar] [CrossRef] [PubMed]
- Hong, Y.Y.; Diaz, M.; Cordova-Figueroa, U.M.; Sen, A. Light-Driven Titanium-Dioxide-Based Reversible Microfireworks and Micromotor/Micropump Systems. Adv. Funct. Mater. 2010, 20, 1568–1576. [Google Scholar] [CrossRef]
- Zhang, D.D.; Barbot, A.; Lo, B.; Yang, G.Z. Distributed Force Control for Microrobot Manipulation via Planar Multi-Spot Optical Tweezer. Adv. Opt. Mater. 2020, 8, 15. [Google Scholar] [CrossRef]
- Bustamante, C.J.; Chemla, Y.R.; Liu, S.X.; Wang, M.D. Optical tweezers in single-molecule biophysics. Nat. Rev. Method. Prim. 2021, 1, 29. [Google Scholar] [CrossRef]
- Bui, A.A.M.; Stilgoe, A.B.; Lenton, I.C.D.; Gibson, L.J.; Kashchuk, A.V.; Zhang, S.; Rubinsztein-Dunlop, H.; Nieminen, T.A. Theory and practice of simulation of optical tweezers. J. Quant. Spectrosc. Radiat. Transf. 2017, 195, 66–75. [Google Scholar] [CrossRef]
- Polimeno, P.; Magazzu, A.; Iati, M.A.; Patti, F.; Saija, R.; Boschi, C.D.; Donato, M.G.; Gucciardi, P.G.; Jones, P.H.; Volpe, G.; et al. Optical tweezers and their applications. J. Quant. Spectrosc. Radiat. Transf. 2018, 218, 131–150. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, L.; Chen, Y.H.; Liu, Z.H.; Zhang, Y.X.; Zhao, E.M.; Yang, J.; Yuan, L.B. Single optical tweezers based on elliptical core fiber. Opt. Commun. 2016, 365, 103–107. [Google Scholar] [CrossRef]
- Blazquez-Castro, A. Optical Tweezers: Phototoxicity and Thermal Stress in Cells and Biomolecules. Micromachines 2019, 10, 42. [Google Scholar] [CrossRef] [PubMed]
- Dholakia, K.; Reece, P.; Gu, M. Optical micromanipulation. Chem. Soc. Rev. 2008, 37, 42–55. [Google Scholar] [CrossRef] [PubMed]
- Jonas, A.; Zemanek, P. Light at work: The use of optical forces for particle manipulation, sorting, and analysis. Electrophoresis 2008, 29, 4813–4851. [Google Scholar] [CrossRef]
- Padgett, M.; Di Leonardo, R. Holographic optical tweezers and their relevance to lab on chip devices. Lab Chip 2011, 11, 1196–1205. [Google Scholar] [CrossRef] [PubMed]
- Marago, O.M.; Jones, P.H.; Gucciardi, P.G.; Volpe, G.; Ferrari, A.C. Optical trapping and manipulation of nanostructures. Nat. Nanotechnol. 2013, 8, 807–819. [Google Scholar] [CrossRef]
- Preece, D.; Warren, R.; Evans, R.M.L.; Gibson, G.M.; Padgett, M.J.; Cooper, J.M.; Tassieri, M. Optical tweezers: Wideband microrheology. J. Opt. 2011, 13, 6. [Google Scholar] [CrossRef]
- Tassieri, M.; Evans, R.M.L.; Warren, R.L.; Bailey, N.J.; Cooper, J.M. Microrheology with optical tweezers: Data analysis. New J. Phys. 2012, 14, 19. [Google Scholar] [CrossRef]
- Petrov, D.V. Raman spectroscopy of optically trapped particles. J. Opt. A Pure Appl. Opt. 2007, 9, S139–S156. [Google Scholar] [CrossRef]
- Robertson-Anderson, R.M. Optical Tweezers Microrheology: From the Basics to Advanced Techniques and Applications. ACS Macro Lett. 2018, 7, 968–975. [Google Scholar] [CrossRef] [PubMed]
- Gieseler, J.; Millen, J. Levitated Nanoparticles for Microscopic Thermodynamics—A Review. Entropy 2018, 20, 23. [Google Scholar] [CrossRef]
- Martinez, I.A.; Roldan, E.; Dinis, L.; Rica, R.A. Colloidal heat engines: A review. Soft Matter 2017, 13, 22–36. [Google Scholar] [CrossRef] [PubMed]
- Gieseler, J.; Gomez-Solano, J.R.; Magazzu, A.; Castillo, I.P.; Garcia, L.P.; Gironella-Torrent, M.; Viader-Godoy, X.; Ritort, F.; Pesce, G.; Arzola, A.V.; et al. Optical tweezers—From calibration to applications: A tutorial. Adv. Opt. Photonics 2021, 13, 74–241. [Google Scholar] [CrossRef]
- Shoji, T.; Tsuboi, Y. Plasmonic Optical Tweezers toward Molecular Manipulation: Tailoring Plasmonic Nanostructure, Light Source, and Resonant Trapping. J. Phys. Chem. Lett. 2014, 5, 2957–2967. [Google Scholar] [CrossRef]
- Juan, M.L.; Righini, M.; Quidant, R. Plasmon nano-optical tweezers. Nat. Photonics 2011, 5, 349–356. [Google Scholar] [CrossRef]
- Mandal, S.; Serey, X.; Erickson, D. Nanomanipulation Using Silicon Photonic Crystal Resonators. Nano Lett. 2010, 10, 99–104. [Google Scholar] [CrossRef]
- Agate, B.; Brown, C.T.A.; Sibbett, W.; Dholakia, K. Femtosecond optical tweezers for in-situ control of two-photon fluorescence. Opt. Express 2004, 12, 3011–3017. [Google Scholar] [CrossRef]
- Usman, A.; Chiang, W.Y.; Masuhara, H. Femtosecond Trapping Efficiency Enhanced for Nano-sized Silica Spheres. In Proceedings of the Conference on Optical Trapping and Optical Micromanipulation IX, San Diego, CA, USA, 12–16 August 2012. [Google Scholar]
- Hohlbein, J.; Gryte, K.; Heilemann, M.; Kapanidis, A.N. Surfing on a new wave of single-molecule fluorescence methods. Phys. Biol. 2010, 7, 22. [Google Scholar] [CrossRef]
- Hashemi Shabestari, M.; Meijering, A.E.C.; Roos, W.H.; Wuite, G.J.L.; Peterman, E.J.G. Chapter Four—Recent Advances in Biological Single-Molecule Applications of Optical Tweezers and Fluorescence Microscopy. Methods Enzymol. 2017, 582, 85–119. [Google Scholar]
- Van Dijk, M.A.; Kapitein, L.C.; van Mameren, J.; Schmidt, C.F.; Peterman, E.J.G. Combining optical trapping and single-molecule fluorescence spectroscopy: Enhanced photobleaching of fluorophores. J. Phys. Chem. B 2004, 108, 6479–6484. [Google Scholar] [CrossRef] [PubMed]
- Gao, D.L.; Ding, W.Q.; Nieto-Vesperinas, M.; Ding, X.M.; Rahman, M.; Zhang, T.H.; Lim, C.; Qiu, C.W. Optical manipulation from the microscale to the nanoscale: Fundamentals, advances and prospects. Light-Sci. Appl. 2017, 6, 15. [Google Scholar] [CrossRef]
- Nussenzveig, H.M. Cell membrane biophysics with optical tweezers. Eur. Biophys. J. Biophys. Lett. 2018, 47, 499–514. [Google Scholar] [CrossRef]
- Keloth, A.; Anderson, O.; Risbridger, D.; Paterson, L. Single Cell Isolation Using Optical Tweezers. Micromachines 2018, 9, 21. [Google Scholar] [CrossRef]
- Kelley, M.; Cooper, J.; Devito, D.; Mushi, R.; Aguinaga, M.D.; Erenso, D.B. Laser trap ionization for identification of human erythrocytes with variable hemoglobin quantitation. J. Biomed. Opt. 2018, 23, 10. [Google Scholar] [CrossRef]
- Kelley, M.; Gao, Y.; Erenso, D. Single cell ionization by a laser trap: A preliminary study in measuring radiation dose and charge in BT20 breast carcinoma cells. Biomed. Opt. Express 2016, 7, 3438–3448. [Google Scholar] [CrossRef]
- Mills, J.P.; Qie, L.; Dao, M.; Lim, C.T.; Suresh, S. Nonlinear elastic and viscoelastic deformation of the human red blood cell with optical tweezers. Mech. Chem. Biosyst. MCB 2004, 1, 169–180. [Google Scholar]
- Zhu, R.X.; Popov, A.; Meglinski, I. Probing the red blood cell interaction in individual cell pairs by optical tweezers. In Proceedings of the Conference on Lasers and Electro-Optics (CLEO), San Jose, CA, USA, 10–15 May 2020. [Google Scholar]
- Zhu, R.; Avsievich, T.; Popov, A.; Meglinski, I. Influence of interaction time on the red blood cell (dis)aggregation dynamics in vitro studied by optical tweezers. In Proceedings of the Clinical and Preclinical Optical Diagnostics II, Munich, Germany, 23–25 June 2019; p. 11075_12. [Google Scholar]
- Lee, K.; Kinnunen, M.; Khokhlova, M.D.; Lyubin, E.V.; Priezzhev, A.V.; Meglinski, I.; Fedyanin, A.A. Optical tweezers study of red blood cell aggregation and disaggregation in plasma and protein solutions. J. Biomed. Opt. 2016, 21, 10. [Google Scholar] [CrossRef] [PubMed]
- Dao, M.; Lim, C.T.; Suresh, S. Mechanics of the human red blood cell deformed by optical tweezers. J. Mech. Phys. Solids 2003, 51, 2259–2280, Erratum in J. Mech. Phys. Solids 2005, 53, 493–494. [Google Scholar] [CrossRef]
- Zhu, R.; Avsievich, T.; Bykov, A.; Popov, A.; Meglinski, I. Influence of Pulsed He-Ne Laser Irradiation on the Red Blood Cell Interaction Studied by Optical Tweezers. Micromachines 2019, 10, 853. [Google Scholar] [CrossRef]
- Agrawal, R.; Smart, T.; Nobre-Cardoso, J.; Richards, C.; Bhatnagar, R.; Tufail, A.; Shima, D.; Jones, P.H.; Pavesio, C. Assessment of red blood cell deformability in type 2 diabetes mellitus and diabetic retinopathy by dual optical tweezers stretching technique. Sci. Rep. 2016, 6, 12. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, K.K. Optical tweezers for single cells. J. R. Soc. Interface 2008, 5, 671–690. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, D.; Lu, M.; Nourhani, A.; Lammert, P.E.; Stratton, Z.; Muddana, H.S.; Crespi, V.H.; Huang, T.J. Selectively manipulable acoustic-powered microswimmers. Sci. Rep. 2015, 5, 9744. [Google Scholar] [CrossRef]
- Sitti, M.; Wiersma, D.S. Pros and Cons: Magnetic versus Optical Microrobots. Adv. Mater. 2020, 32, 9. [Google Scholar] [CrossRef]
- Kim, Y.; Yuk, H.; Zhao, R.K.; Chester, S.A.; Zhao, X.H. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef] [PubMed]
- Rikken, R.S.M.; Nolte, R.J.M.; Maan, J.C.; van Hest, J.C.M.; Wilson, D.A.; Christianen, P.C.M. Manipulation of micro- and nanostructure motion with magnetic fields. Soft Matter 2014, 10, 1295–1308. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.X.; Yang, L.D.; Zhang, L. Autonomous Navigation of Magnetic Microrobots in a Large Workspace Using Mobile-Coil System. IEEE-ASME Trans. Mechatron. 2021, 26, 3163–3174. [Google Scholar] [CrossRef]
- Hunter, E.E.; Steager, E.B.; Hsu, A.; Wong-Foy, A.; Pelrine, R.; Kumar, V. Nanoliter Fluid Handling for Microbiology Via Levitated Magnetic Microrobots. IEEE Robot. Autom. Lett. 2019, 4, 997–1004. [Google Scholar] [CrossRef]
- Yasa, O.; Erkoc, P.; Alapan, Y.; Sitti, M. Microalga-Powered Microswimmers toward Active Cargo Delivery. Adv. Mater. 2018, 30, 10. [Google Scholar] [CrossRef] [PubMed]
- Santomauro, G.; Singh, A.V.; Park, B.W.; Mohammadrahimi, M.; Erkoc, P.; Goering, E.; Schutz, G.; Sitti, M.; Bill, J. Incorporation of Terbium into a Microalga Leads to Magnetotactic Swimmers. Adv. Biosyst. 2018, 2, 10. [Google Scholar] [CrossRef]
- Du, X.Z.; Zhang, M.Q.; Yu, J.F.; Yang, L.D.; Chiu, P.W.Y.; Zhang, L. Design and Real-Time Optimization for a Magnetic Actuation System with Enhanced Flexibility. IEEE-ASME Trans. Mechatron. 2021, 26, 1524–1535. [Google Scholar] [CrossRef]
- Yigit, B.; Alapan, Y.; Sitti, M. Programmable Collective Behavior in Dynamically Self-Assembled Mobile Microrobotic Swarms. Adv. Sci. 2019, 6, 10. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.D.; Giltinan, J.; Zakharchenko, S.; Sitti, M. Dynamic and programmable self-assembly of micro-rafts at the air-water interface. Sci. Adv. 2017, 3, 9. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.G.; Troll, J.; Jeong, H.H.; Wei, Q.; Stang, M.; Ziemssen, F.; Wang, Z.G.; Dong, M.D.; Schnichels, S.; Qiu, T.; et al. A swarm of slippery micropropellers penetrates the vitreous body of the eye. Sci. Adv. 2018, 4, 10. [Google Scholar] [CrossRef]
- Xu, T.T.; Yu, J.F.; Yan, X.H.; Choi, H.; Zhang, L. Magnetic Actuation Based Motion Control for Microrobots: An Overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef]
- Salehizadeh, M.; Li, Z.X.; Diller, E. Independent Position Control of Two Magnetic Microrobots via Rotating Magnetic Field in Two Dimensions. In Proceedings of the 2019 4th International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS 2019), Helsinki, Finland, 1–5 July 2019. [Google Scholar]
- Li, D.F.; Niu, F.Z.; Li, J.Y.; Li, X.J.; Sun, D. Gradient-Enhanced Electromagnetic Actuation System with a New Core Shape Design for Microrobot Manipulation. IEEE Trans. Ind. Electron. 2020, 67, 4700–4710. [Google Scholar] [CrossRef]
- Xing, L.X.; Li, D.F.; Cao, H.; Fan, L.; Zheng, L.S.; Zhang, L.; Sun, D. A New Drive System for Microagent Control in Targeted Therapy Based on Rotating Gradient Magnetic Fields. Adv. Intell. Syst. 2022, 4, 2100214. [Google Scholar] [CrossRef]
- Ebbens, S.J.; Howse, J.R. In pursuit of propulsion at the nanoscale. Soft Matter 2010, 6, 726–738. [Google Scholar] [CrossRef]
- Hong, Y.; Velegol, D.; Chaturvedi, N.; Sen, A. Biomimetic behavior of synthetic particles: From microscopic randomness to macroscopic control. Phys. Chem. Chem. Phys. 2010, 12, 1423–1435. [Google Scholar] [CrossRef]
- Kwon, G.H.; Park, J.Y.; Kim, J.Y.; Frisk, M.L.; Beebe, D.J.; Lee, S.H. Biomimetic Soft Multifunctional Miniature Aquabots. Small 2008, 4, 2148–2153. [Google Scholar] [CrossRef] [PubMed]
- Sokolov, I.L.; Cherkasov, V.R.; Tregubov, A.A.; Buiucli, S.R.; Nikitin, M.P. Smart materials on the way to theranostic nanorobots: Molecular machines and nanomotors, advanced biosensors, and intelligent vehicles for drug delivery. Biochim. Biophys. Acta Gen. Subj. 2017, 1861, 1530–1544. [Google Scholar] [CrossRef]
- Palleau, E.; Morales, D.; Dickey, M.D.; Velev, O.D. Reversible patterning and actuation of hydrogels by electrically assisted ionoprinting. Nat. Commun. 2013, 4, 7. [Google Scholar] [CrossRef] [PubMed]
- Ueno, S.; Takemura, K.; Yokota, S.; Edamura, K. Micro inchworm robot using electro-conjugate fluid. Sens. Actuator A Phys. 2014, 216, 36–42. [Google Scholar] [CrossRef]
- Mather, P.T.; Luo, X.; Rousseau, I.A. Shape Memory Polymer Research. Annu. Rev. Mater. Sci. 2009, 39, 445–471. [Google Scholar] [CrossRef]
- Shen, X.Y.; Viney, C.; Johnson, E.R.; Wang, C.C.; Lu, J.Q. Large negative thermal expansion of a polymer driven by a submolecular conformational change. Nat. Chem. 2013, 5, 1035–1041, Erratum in Nat. Chem. 2014, 6, 453. [Google Scholar] [CrossRef]
- Kim, Y.S.; Liu, M.J.; Ishida, Y.; Ebina, Y.; Osada, M.; Sasaki, T.; Hikima, T.; Takata, M.; Aida, T. Thermoresponsive actuation enabled by permittivity switching in an electrostatically anisotropic hydrogel. Nat. Mater. 2015, 14, 1002–1007. [Google Scholar] [CrossRef]
- Wang, H.; Liang, Y.; Gao, W.; Dong, R.; Wang, C. Emulsion Hydrogel Soft Motor Actuated by Thermal Stimulation. ACS Appl. Mater. Interfaces 2017, 9, 43211–43219. [Google Scholar] [CrossRef]
- Yoshida, R. Self-Oscillating Gels Driven by the Belousov-Zhabotinsky Reaction as Novel Smart Materials. Adv. Mater. 2010, 22, 3463–3483. [Google Scholar] [CrossRef]
- Wang, B.; Chan, K.F.; Yuan, K.; Wang, Q.Q.; Xia, X.F.; Yang, L.D.; Ko, H.; Wang, Y.X.J.; Sung, J.J.Y.; Chiu, P.W.Y.; et al. Endoscopy-assisted magnetic navigation of biohybrid soft microrobots with rapid endoluminal delivery and imaging. Sci. Robot. 2021, 6, 15. [Google Scholar] [CrossRef]
- Tang, S.S.; Zhang, F.Y.; Gong, H.; Wei, F.N.; Zhuang, J.; Karshalev, E.; de Avila, B.E.F.; Huang, C.Y.; Zhou, Z.D.; Li, Z.X.; et al. Enzyme-powered Janus platelet cell robots for active and targeted drug delivery. Sci. Robot. 2020, 5, 11. [Google Scholar] [CrossRef]
- Hortelao, A.C.; Simo, C.; Guix, M.; Guallar-Garrido, S.; Julian, E.; Vilela, D.; Rejc, L.; Ramos-Cabrer, P.; Cossio, U.; Gomez-Vallejo, V.; et al. Swarming behavior and in vivo monitoring of enzymatic nanomotors within the bladder. Sci. Robot. 2021, 6, 14. [Google Scholar] [CrossRef]
- Ma, X.; Jannasch, A.; Albrecht, U.R.; Hahn, K.; Miguel-Lopez, A.; Schaffer, E.; Sanchez, S. Enzyme-Powered Hollow Mesoporous Janus Nanomotors. Nano Lett. 2015, 15, 7043–7050. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.H.; Arque, X.; Patino, T.; Guillerm, V.; Blersch, P.R.; Perez-Carvajal, J.; Imaz, I.; Maspoch, D.; Sanchez, S. Enzyme-Powered Porous Micromotors Built from a Hierarchical Micro- and Mesoporous UiO-Type Metal-Organic Framework. J. Am. Chem. Soc. 2020, 142, 20962–20967. [Google Scholar] [CrossRef] [PubMed]
- Hayakawa, M.; Onoe, H.; Nagai, K.H.; Takinoue, M. Complex-shaped three-dimensional multi-compartmental microparticles generated by diffusional and Marangoni microflows in centrifugally discharged droplets. Sci. Rep. 2016, 6, 9. [Google Scholar] [CrossRef]
- Ismagilov, R.F.; Schwartz, A.; Bowden, N.; Whitesides, G.M. Autonomous Movement and Self-Assembly. Angew. Chem. Int. Ed. 2002, 41, 652–654. [Google Scholar] [CrossRef]
- Mirkovic, T.; Zacharia, N.S.; Scholes, G.D.; Ozin, G.A. Fuel for Thought: Chemically Powered Nanomotors Out-Swim Nature’s Flagellated Bacteria. ACS Nano 2010, 4, 1782–1789, Erratum in ACS Nano 2010, 4, 3534. [Google Scholar] [CrossRef]
- Kagan, D.; Laocharoensuk, R.; Zimmerman, M.; Clawson, C.; Balasubramanian, S.; Kong, D.; Bishop, D.; Sattayasamitsathit, S.; Zhang, L.F.; Wang, J. Rapid Delivery of Drug Carriers Propelled and Navigated by Catalytic Nanoshuttles. Small 2010, 6, 2741–2747. [Google Scholar] [CrossRef]
- Vicario, J.; Eelkema, R.; Browne, W.R.; Meetsma, A.; La Crois, R.M.; Feringa, B.L. Catalytic molecular motors: Fuelling autonomous movement by a surface bound synthetic manganese catalase. Commun. Chem. 2005, 3936–3938. [Google Scholar] [CrossRef] [PubMed]
- Gibbs, J.G.; Zhao, Y.P. Autonomously motile catalytic nanomotors by bubble propulsion. Appl. Phys. Lett. 2009, 94, 3. [Google Scholar] [CrossRef]
- Wu, Y.J.; Lin, X.K.; Wu, Z.G.; Mohwald, H.; He, Q. Self-Propelled Polymer Multilayer Janus Capsules for Effective Drug Delivery and Light-Triggered Release. ACS Appl. Mater. Interfaces 2014, 6, 10476–10481. [Google Scholar] [CrossRef]
- Tu, Y.F.; Peng, F.; Andre, A.A.M.; Men, Y.J.; Srinivas, M.; Wilson, D.A. Biodegradable Hybrid Stomatocyte Nanomotors for Drug Delivery. ACS Nano 2017, 11, 1957–1963. [Google Scholar] [CrossRef]
- Mei, Y.F.; Solovev, A.A.; Sanchez, S.; Schmidt, O.G. Rolled-up nanotech on polymers: From basic perception to self-propelled catalytic microengines. Chem. Soc. Rev. 2011, 40, 2109–2119. [Google Scholar] [CrossRef]
- Sharma, R.; Chang, S.T.; Velev, O.D. Gel-Based Self-Propelling Particles Get Programmed to Dance. Langmuir 2012, 28, 10128–10135. [Google Scholar] [CrossRef] [PubMed]
- Zhao, G.; Pumera, M. Macroscopic Self-Propelled Objects. Chem. Asian J. 2012, 7, 1994–2002. [Google Scholar] [CrossRef]
- Yoshida, K.; Yamawaki, S.; Onoe, H. Ethanol driven micro-robots with photonic colloidal crystal hydrogel for exploring and sensing stimuli. In Proceedings of the 34th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Electr Network, Gainesville, FL, USA, 25–29 January 2021; pp. 47–50. [Google Scholar]
- Shen, F.; Hwang, H.; Hahn, Y.K.; Park, J.-K. Label-Free Cell Separation Using a Tunable Magnetophoretic Repulsion Force. Anal. Chem. 2012, 84, 3075–3081. [Google Scholar] [CrossRef]
- Plouffe, B.D.; Mahalanabis, M.; Lewis, L.H.; Klapperich, C.M.; Murthy, S.K. Clinically Relevant Microfluidic Magnetophoretic Isolation of Rare-Cell Populations for Diagnostic and Therapeutic Monitoring Applications. Anal. Chem. 2012, 84, 1336–1344. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.H.; Cho, S.H.; Chiang, H.-I.; Tsai, F.; Zhang, K.; Lo, Y.-H. Specific Sorting of Single Bacterial Cells with Microfabricated Fluorescence-Activated Cell Sorting and Tyramide Signal Amplification Fluorescence in Situ Hybridization. Anal. Chem. 2011, 83, 7269–7275. [Google Scholar] [CrossRef] [PubMed]
- Forbes, T.P.; Forry, S.P. Microfluidic magnetophoretic separations of immunomagnetically labeled rare mammalian cells. Lab Chip 2012, 12, 1471–1479. [Google Scholar] [CrossRef]
- Salieb-Beugelaar, G.B.; Simone, G.; Arora, A.; Philippi, A.; Manz, A. Latest Developments in Microfluidic Cell Biology and Analysis Systems. Anal. Chem. 2010, 82, 4848–4864. [Google Scholar] [CrossRef] [PubMed]
- Xie, M.Y.; Shakoor, A.; Wu, C.C. Manipulation of Biological Cells Using a Robot-Aided Optical Tweezers System. Micromachines 2018, 9, 13. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.J.; Wen, C.; Xie, H.M.; Ye, A.P.; Yin, Y.J. Mechanical property analysis of stored red blood cell using optical tweezers. Colloids Surf. B 2009, 70, 169–173. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.G.; Li, Y.M.; Lu, D.; Liu, Z.; Cheng, Z.D.; He, L.Q. Measurement of the membrane elasticity of red blood cell with osmotic pressure by optical tweezers. Cryo Lett. 2009, 30, 89–95. [Google Scholar]
- Jing, P.F.; Wu, J.D.; Liu, G.W.; Keeler, E.G.; Pun, S.H.; Lin, L.Y. Photonic Crystal Optical Tweezers with High Efficiency for Live Biological Samples and Viability Characterization. Sci. Rep. 2016, 6, 7. [Google Scholar] [CrossRef]
- Grexa, I.; Fekete, T.; Molnar, J.; Molnar, K.; Vizsnyiczai, G.; Ormos, P.; Kelemen, L. Single-Cell Elasticity Measurement with an Optically Actuated Microrobot. Micromachines 2020, 11, 13. [Google Scholar] [CrossRef] [PubMed]
- Hou, X.M.; DeSantis, M.C.; Tian, C.J.; Cheng, W. Optical manipulation of a single human virus for study of viral-cell interactions. In Proceedings of the Conference on Optical Trapping and Optical Micromanipulation XIII, San Diego, CA, USA, 28 August–1 September 2016. [Google Scholar]
- Zhao, Q.; Wang, H.W.; Yu, P.P.; Zhang, S.H.; Zhou, J.H.; Li, Y.M.; Gong, L. Trapping and Manipulation of Single Cells in Crowded Environments. Front. Bioeng. Biotechnol. 2020, 8, 6. [Google Scholar] [CrossRef]
- Ding, X.; Lin, S.-C.S.; Lapsley, M.I.; Li, S.; Guo, X.; Chan, C.Y.; Chiang, I.K.; Wang, L.; McCoy, J.P.; Huang, T.J. Standing surface acoustic wave (SSAW) based multichannel cell sorting. Lab Chip 2012, 12, 4228–4231. [Google Scholar] [CrossRef]
- Antfolk, M.; Laurell, T. Continuous flow microfluidic separation and processing of rare cells and bioparticles found in blood—A review. Anal. Chim. Acta 2017, 965, 9–35. [Google Scholar] [CrossRef]
- Wang, C.; Ma, Y.T.; Pei, Z.G.; Song, F.F.; Zhong, J.F.; Wang, Y.; Yan, X.T.; Dai, P.; Jiang, Y.; Qiu, J.P.; et al. Sheathless acoustic based flow cell sorter for enrichment of rare cells. Cytom. A 2022, 101, 311–324. [Google Scholar] [CrossRef]
- Hwang, J.Y.; Lee, C.; Lam, K.H.; Kim, H.H.; Lee, J.; Shung, K.K. Cell membrane deformation induced by a fibronectin-coated polystyrene microbead in a 200-MHz acoustic trap. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 399–406. [Google Scholar] [CrossRef] [PubMed]
- Lee, O.J.; Lim, H.G.; Shung, K.K.; Kim, J.-T.; Kim, H.H. Automated estimation of cancer cell deformability with machine learning and acoustic trapping. Sci. Rep. 2022, 12, 6891. [Google Scholar] [CrossRef]
- Ahmed, D.; Ozcelik, A.; Bojanala, N.; Nama, N.; Upadhyay, A.; Chen, Y.; Hanna-Rose, W.; Huang, T.J. Rotational manipulation of single cells and organisms using acoustic waves. Nat. Commun. 2016, 7, 11085. [Google Scholar] [CrossRef]
- Lee, J.J.; Jeong, K.J.; Hashimoto, M.; Kwon, A.H.; Rwei, A.; Shankarappa, S.A.; Tsui, J.H.; Kohane, D.S. Synthetic Ligand-Coated Magnetic Nanoparticles for Microfluidic Bacterial Separation from Blood. Nano Lett. 2014, 14, 1–5. [Google Scholar] [CrossRef]
- Martin, A.B.; Wu, W.T.; Kameneva, M.V.; Antaki, J.F. Development of a High-Throughput Magnetic Separation Device for Malaria-Infected Erythrocytes. Ann. Biomed. Eng. 2017, 45, 2888–2898. [Google Scholar] [CrossRef]
- Shen, M.J.; Olsthoorn, R.C.L.; Zeng, Y.; Bakkum, T.; Kros, A.; Boyle, A.L. Magnetic-Activated Cell Sorting Using Coiled-Coil Peptides: An Alternative Strategy for Isolating Cells with High Efficiency and Specificity. Acs Appl. Mater. Interfaces 2021, 13, 11621–11630. [Google Scholar] [CrossRef]
- Lewis, A.; Koukoura, A.; Tsianos, G.-I.; Gargavanis, A.A.; Nielsen, A.A.; Vassiliadis, E. Organ donation in the US and Europe: The supply vs demand imbalance. Transplant. Rev. 2021, 35, 100585. [Google Scholar] [CrossRef] [PubMed]
- Zhong, M.C.; Wei, X.B.; Zhou, J.H.; Wang, Z.Q.; Li, Y.M. Trapping red blood cells in living animals using optical tweezers. Nat. Commun. 2013, 4, 7. [Google Scholar] [CrossRef]
- Johansen, P.L.; Fenaroli, F.; Evensen, L.; Griffiths, G.; Koster, G. Optical micromanipulation of nanoparticles and cells inside living zebrafish. Nat. Commun. 2016, 7, 8. [Google Scholar] [CrossRef] [PubMed]
- Horner, F.; Meissner, R.; Polali, S.; Pfeiffer, J.; Betz, T.; Denz, C.; Raz, E. Holographic optical tweezers-based in vivo manipulations in zebrafish embryos. J. Biophotonics 2017, 10, 1492–1501. [Google Scholar] [CrossRef]
- Foresti, D.; Kroll, K.T.; Amissah, R.; Sillani, F.; Homan, K.A.; Poulikakos, D.; Lewis, J.A. Acoustophoretic printing. Sci. Adv. 2018, 4, eaat1659. [Google Scholar] [CrossRef]
- Gherardini, L.; Radel, S.; Sielemann, S.; Doblhoff-Dier, O.; Gröschl, M.; Benes, E.; McLoughlin, A.J. A study of the spatial organisation of microbial cells in a gel matrix subjected to treatment with ultrasound standing waves. Bioseparation 2001, 10, 153–162. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.R.; Bachman, H.; Ozcelik, A.; Huang, T.J. Acoustic Microfluidics. Annu. Rev. Anal. Chem. 2020, 13, 17–43. [Google Scholar] [CrossRef] [PubMed]
- Gesellchen, F.; Bernassau, A.L.; Déjardin, T.; Cumming, D.R.S.; Riehle, M.O. Cell patterning with a heptagon acoustic tweezer—Application in neurite guidance. Lab Chip 2014, 14, 2266–2275. [Google Scholar] [CrossRef]
- Gupta, S.; Alrabaiah, H.; Christophe, M.; Rahimi-Gorji, M.; Nadeem, S.; Bit, A. Evaluation of silk-based bioink during pre and post 3D bioprinting: A review. J. Biomed. Mater. Res. Part B Appl. Biomater. 2021, 109, 279–293. [Google Scholar] [CrossRef] [PubMed]
- Singh, Y.P.; Bandyopadhyay, A.; Mandal, B.B. 3D Bioprinting Using Cross-Linker-Free Silk-Gelatin Bioink for Cartilage Tissue Engineering. ACS Appl. Mater. Interfaces 2019, 11, 33684–33696. [Google Scholar] [CrossRef]
- Kim, S.H.; Hong, H.; Ajiteru, O.; Sultan, M.T.; Lee, Y.J.; Lee, J.S.; Lee, O.J.; Lee, H.; Park, H.S.; Choi, K.Y.; et al. 3D bioprinted silk fibroin hydrogels for tissue engineering. Nat. Protoc. 2021, 16, 5484–5532. [Google Scholar] [CrossRef]
- Kim, S.H.; Yeon, Y.K.; Lee, J.M.; Chao, J.R.; Lee, Y.J.; Seo, Y.B.; Sultan, M.T.; Lee, O.J.; Lee, J.S.; Yoon, S.I.; et al. Precisely printable and biocompatible silk fibroin bioink for digital light processing 3D printing. Nat. Commun. 2018, 9, 1620. [Google Scholar] [CrossRef]
- Li, X.; Wang, H.P.; Liu, J.X.; Shi, Q.; Wang, Z.; Ferraro, P.; Huang, Q.; Fukuda, T. Holographic Display-Based Control for High-Accuracy Photolithography of Cellular Micro-Scaffold with Heterogeneous Architecture. IEEE-ASME Trans. Mechatron. 2022, 27, 1117–1127. [Google Scholar] [CrossRef]
- You, S.T.; Xiang, Y.; Hwang, H.H.; Berry, D.B.; Kiratitanaporn, W.; Guan, J.A.; Yao, E.; Tang, M.; Zhong, Z.; Ma, X.Y.; et al. High cell density and high-resolution 3D bioprinting for fabricating vascularized tissues. Sci. Adv. 2023, 9, eade7923. [Google Scholar] [CrossRef]
- Zhou, Y.F. The Application of Ultrasound in 3D Bio-Printing. Molecules 2016, 21, 590. [Google Scholar] [CrossRef] [PubMed]
- Gong, Z.Y.; Huang, L.X.; Tang, X.; Chen, K.K.; Wu, Z.H.; Zhang, L.L.; Sun, Y.; Xia, Y.; Chen, H.; Wei, Y.C.; et al. Acoustic Droplet Printing Tumor Organoids for Modeling Bladder Tumor Immune Microenvironment within a Week. Adv. Healthc. Mater. 2021, 10, 2101312. [Google Scholar] [CrossRef] [PubMed]
- Martel, S.; Mohammadi, M.; Felfoul, O.; Lu, Z.; Pouponneau, P. Flagellated Magnetotactic Bacteria as Controlled MRI-trackable Propulsion and Steering Systems for Medical Nanorobots Operating in the Human Microvasculature. Int. J. Robot. Res. 2009, 28, 571–582. [Google Scholar] [CrossRef]
- Sitti, M.; Ceylan, H.; Hu, W.Q.; Giltinan, J.; Turan, M.; Yim, S.; Diller, E. Biomedical Applications of Untethered Mobile Milli/Microrobots. Proc. IEEE Inst. Electr. Electron. Eng. 2015, 103, 205–224. [Google Scholar] [CrossRef] [PubMed]
- Li, J.X.; de Avila, B.E.F.; Gao, W.; Zhang, L.F.; Wang, J. Micro/nanorobots for biomedicine: Delivery, surgery, sensing, and detoxification. Sci. Robot. 2017, 2, 9. [Google Scholar] [CrossRef]
- Vartholomeos, P.; Fruchard, M.; Ferreira, A.; Mavroidis, C. MRI-Guided Nanorobotic Systems for Therapeutic and Diagnostic Applications. In Annual Review of Biomedical Engineering; Yarmush, M.L., Duncan, J.S., Gray, M.L., Eds.; Annual Reviews: Palo Alto, CA, USA, 2011; Volume 13, pp. 157–184. [Google Scholar]
- Zhong, D.N.; Zhang, D.X.; Xie, T.T.; Zhou, M. Biodegradable Microalgae-Based Carriers for Targeted Delivery and Imaging-Guided Therapy toward Lung Metastasis of Breast Cancer. Small 2020, 16, 10. [Google Scholar] [CrossRef]
- Ensign, L.M.; Cone, R.; Hanes, J. Oral drug delivery with polymeric nanoparticles: The gastrointestinal mucus barriers. Adv. Drug Deliv. Rev. 2012, 64, 557–570. [Google Scholar] [CrossRef]
- Rummer, J.L.; McKenzie, D.J.; Innocenti, A.; Supuran, C.T.; Brauner, C.J. Root Effect Hemoglobin May Have Evolved to Enhance General Tissue Oxygen Delivery. Science 2013, 340, 1327–1329. [Google Scholar] [CrossRef]
- Xu, S.T.; Zhu, X.Y.; Zhang, C.; Huang, W.; Zhou, Y.F.; Yan, D.Y. Oxygen and Pt(ll) self-generating conjugate for synergistic photo-chemo therapy of hypoxic tumor. Nat. Commun. 2018, 9, 9. [Google Scholar]
- Peters, C.; Ergeneman, O.; Nelson, B.J.; Hierold, C. Superparamagnetic swimming microrobots with adjusted magnetic anisotropy. In Proceedings of the 26th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 564–567. [Google Scholar]
- Yan, X.H.; Zhou, Q.; Yu, J.F.; Xu, T.T.; Deng, Y.; Tang, T.; Feng, Q.; Bian, L.M.; Zhang, Y.; Ferreira, A.; et al. Magnetite Nanostructured Porous Hollow Helical Microswimmers for Targeted Delivery. Adv. Funct. Mater. 2015, 25, 5333–5342. [Google Scholar] [CrossRef]
- Mager, D.L. Bacteria and cancer: Cause, coincidence or cure? A review. J. Transl. Med. 2006, 4, 18. [Google Scholar] [CrossRef]
- Roberts, N.J.; Zhang, L.P.; Janku, F.; Collins, A.; Bai, R.Y.; Staedtke, V.; Rusk, A.W.; Tung, D.; Miller, M.; Roix, J.; et al. Intratumoral injection of Clostridium novyi-NT spores induces antitumor responses. Sci. Transl. Med. 2014, 6, 263ra158. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.D.; Han, J.W.; Choi, Y.J.; Cho, S.; Zheng, S.; Ko, S.Y.; Park, J.O.; Park, S. Active tumor-therapeutic liposomal bacteriobot combining a drug (paclitaxel)-encapsulated liposome with targeting bacteria (Salmonella typhimurium). Sens. Actuator B Chem. 2016, 224, 217–224. [Google Scholar] [CrossRef]
- Zhuang, J.; Park, B.W.; Sitti, M. Propulsion and Chemotaxis in Bacteria-Driven Microswimmers. Adv. Sci. 2017, 4, 12. [Google Scholar] [CrossRef]
- Felfoul, O.; Mohammadi, M.; Taherkhani, S.; de Lanauze, D.; Xu, Y.Z.; Loghin, D.; Essa, S.; Jancik, S.; Houle, D.; Lafleur, M.; et al. Magneto-aerotactic bacteria deliver drug-containing nanoliposomes to tumour hypoxic regions. Nat. Nanotechnol. 2016, 11, 941–947. [Google Scholar] [CrossRef] [PubMed]
- Ren, Z.; Zhang, R.; Soon, R.H.; Liu, Z.; Hu, W.; Onck, P.R.; Sitti, M. Soft-bodied adaptive multimodal locomotion strategies in fluid-filled confined spaces. Sci. Adv. 2021, 7, eabh2022. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, H.; Dong, L.; Shi, Q.; Li, J.; Sun, T.; Huang, Q.; Fukuda, T. Ionic shape-morphing microrobotic end-effectors for environmentally adaptive targeting, releasing, and sampling. Nat Commun 2021, 12, 411. [Google Scholar] [CrossRef]









| Power | Penetration Capability | Advantages | Disadvantages | Classification | Features | Reference |
|---|---|---|---|---|---|---|
| Magnetic fields | Strong | Strong control and spatial resolution, high robustness | Metals added to the core material or surface coating will limit its application in vivo | Permanent magnet system | Low energy loss, greater convenience and stronger magnetic field | [101,102,103] |
| Electromagne-tic drive system | Free to change direction and intensity | [81,104,105,106,107,108,109] | ||||
| Soun fields | penetrate the entire human body | Capable of contactless control, low power, small size and high safety | The application of ultrasound might cause oxidative stress in cells | Standing wave | High precision, simple system and low cost | [110,111,112,113,114,115,116,117,118] |
| Traveling wave | High flexibility and large operating space | [119,120,121,122,123,124,125,126,127] | ||||
| Acoustic flow | Ability to manipulate individual objects in groups | [128,129,130] | ||||
| Light fields | penetrate up to 1–2 cm under the skin | High instantaneous drive energy, reflecting a certain degree of programmability; noninvasive | The stability and controllability of light control are not strong; cannot penetrate tissues | Phototropism | Organisms have a natural phototropism | [46,131,132,133] |
| Photothermal or photocatalytic | Driving nanorobots by light-energy-induced catalytic reactions inside the robot | [69,134,135] | ||||
| Optical tweezers | Manipulating cells or organisms at the microscopic scale with high flexibility | [69,136,137,138,139,140,141,142,143] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chen, J.; Su, G.; Mei, J.; Li, J. A Review of Single-Cell Microrobots: Classification, Driving Methods and Applications. Micromachines 2023, 14, 1710. https://doi.org/10.3390/mi14091710
Wang Y, Chen J, Su G, Mei J, Li J. A Review of Single-Cell Microrobots: Classification, Driving Methods and Applications. Micromachines. 2023; 14(9):1710. https://doi.org/10.3390/mi14091710
Chicago/Turabian StyleWang, Yuhang, Jun Chen, Guangfei Su, Jiaxi Mei, and Junyang Li. 2023. "A Review of Single-Cell Microrobots: Classification, Driving Methods and Applications" Micromachines 14, no. 9: 1710. https://doi.org/10.3390/mi14091710