
Virtual Coriolis-Force-Based Mode-Matching Micromachine-Optimized Tuning Fork Gyroscope without a Quadrature-Nulling Loop

Abstract
:1. Introduction
2. Theoretical Analysis of VCF-Based Mode Matching and Matching Error
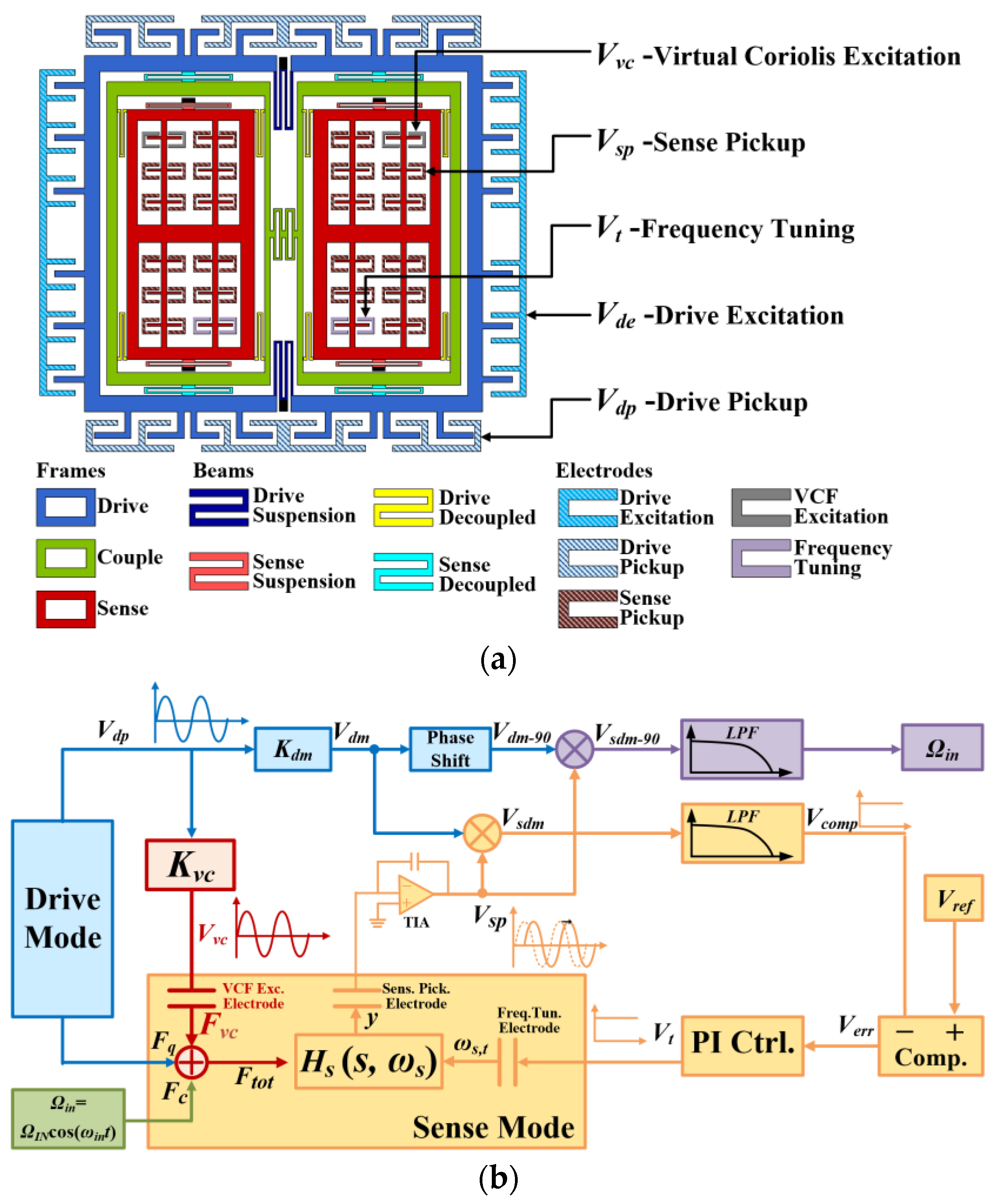
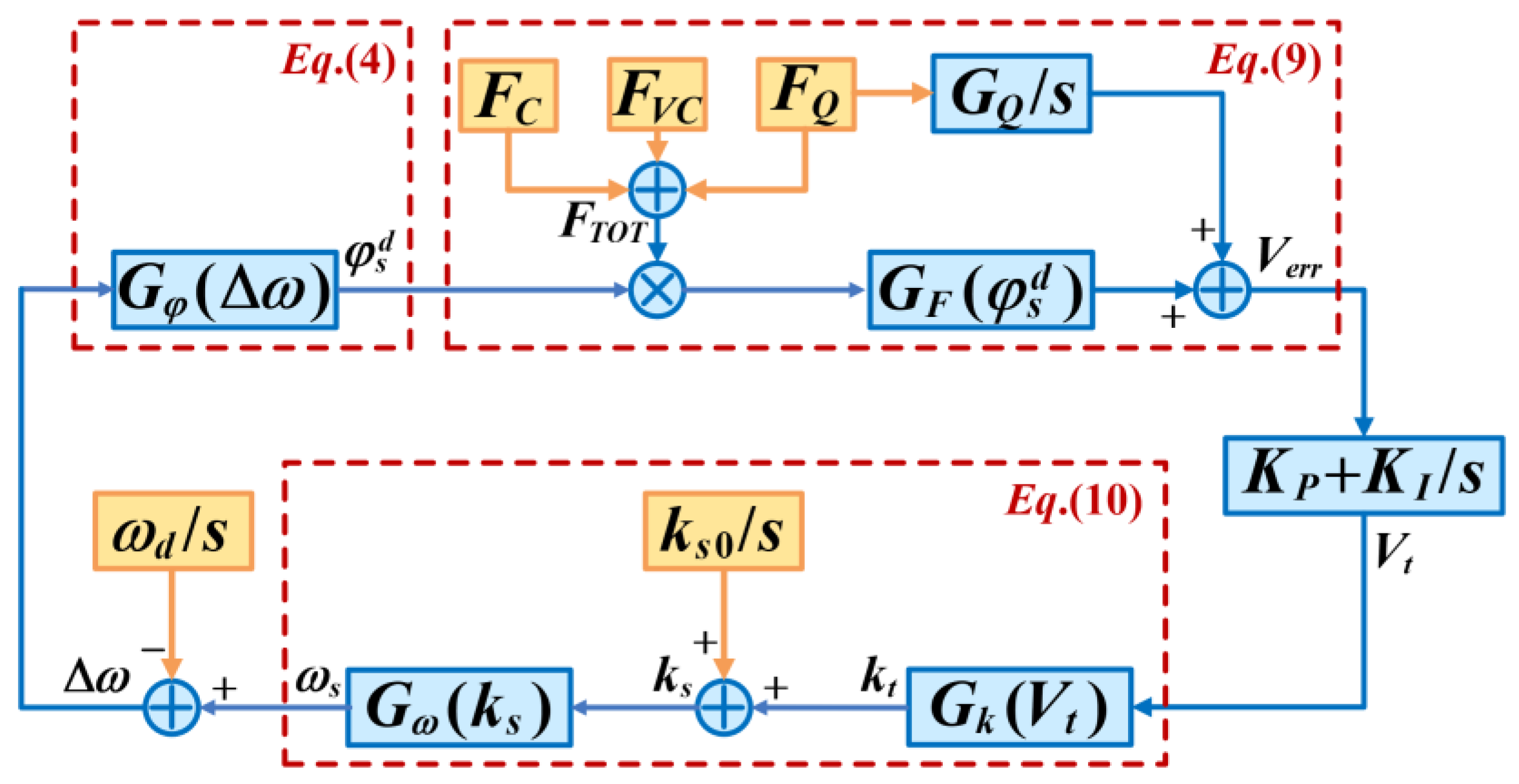
2.1. Mode Matching System Design
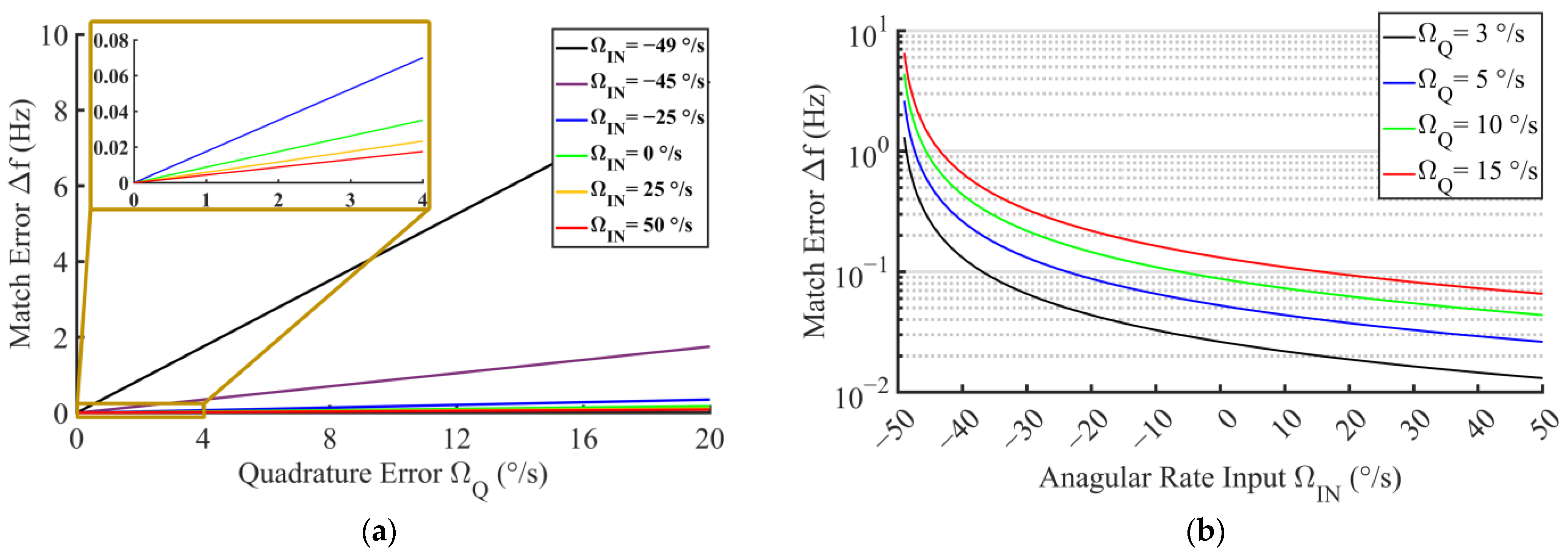
2.2. Quantification of Matching Errors
- Case
- Case
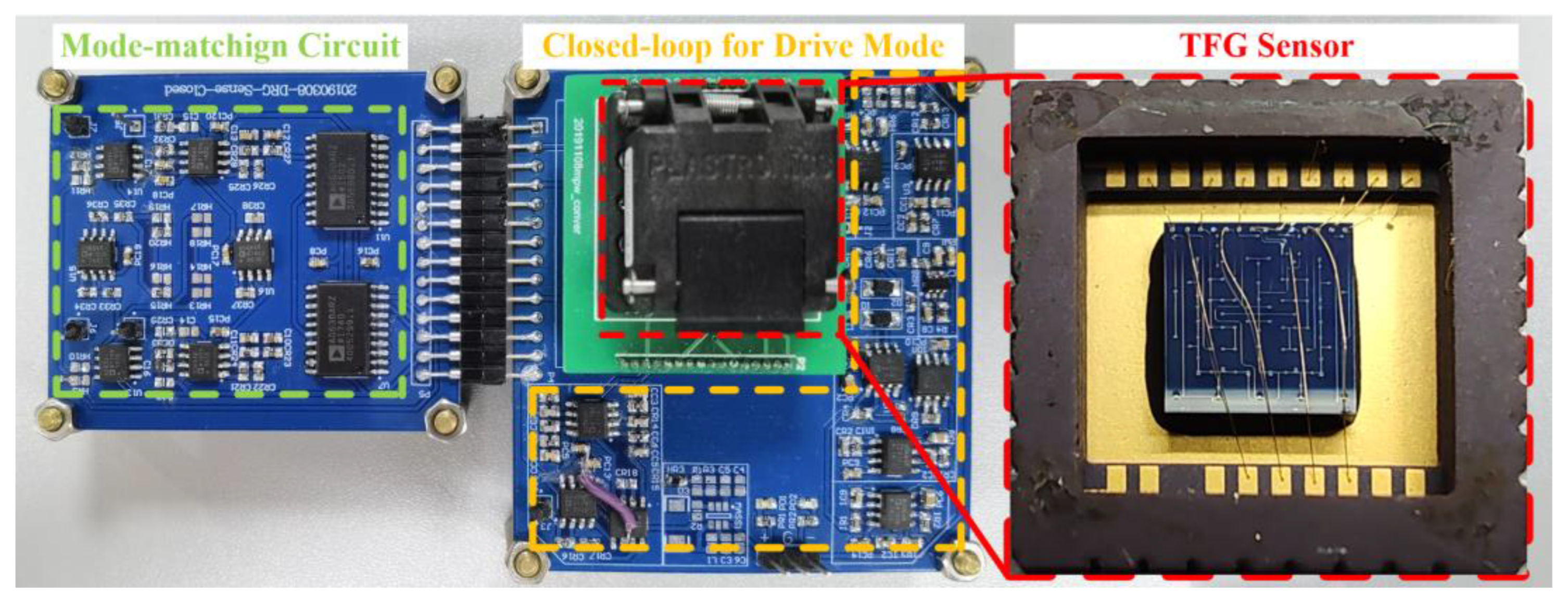
3. System Implementation
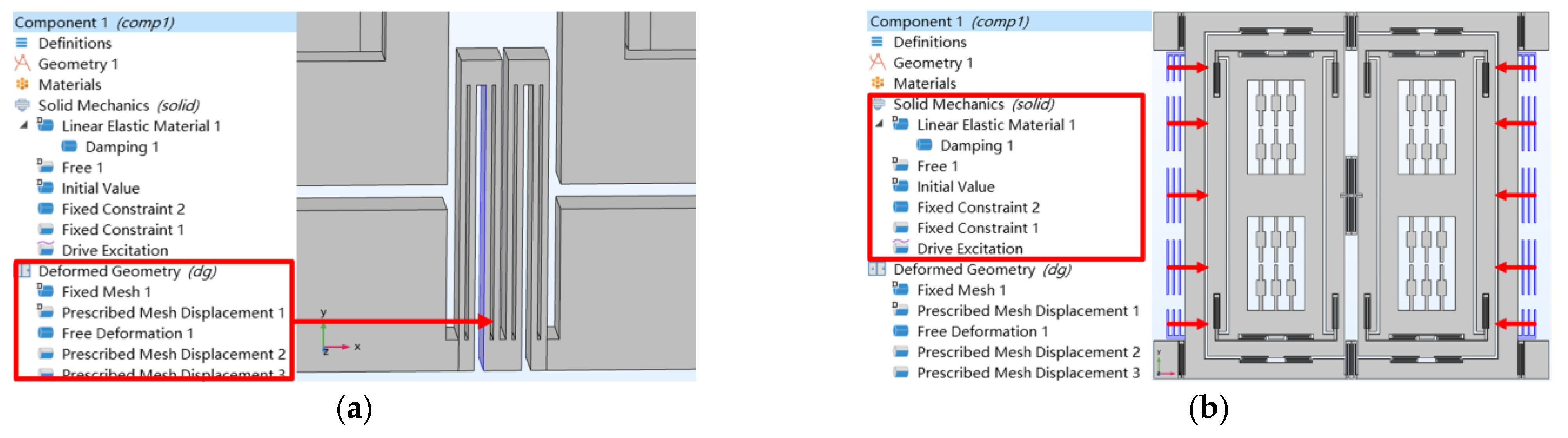
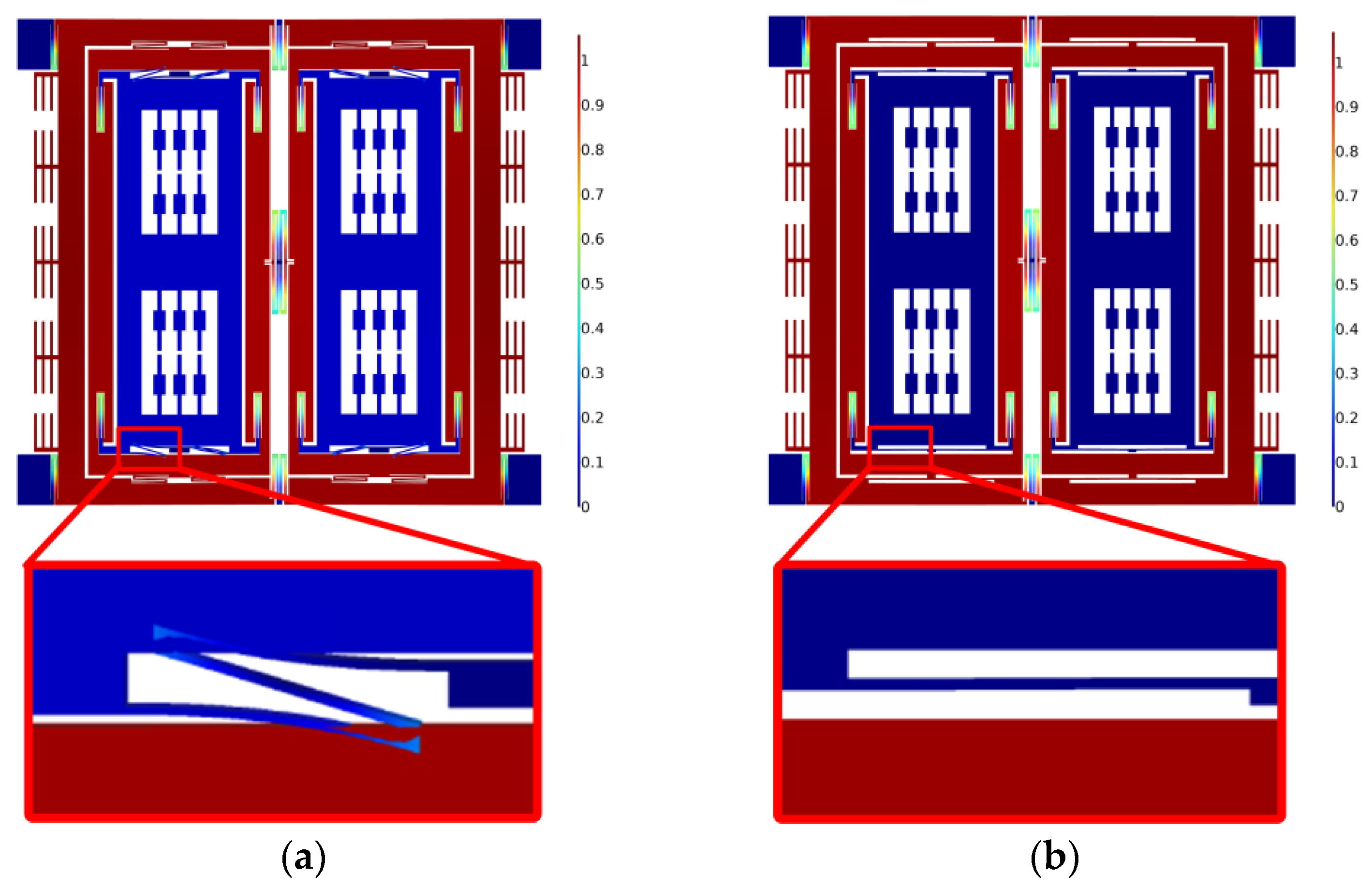
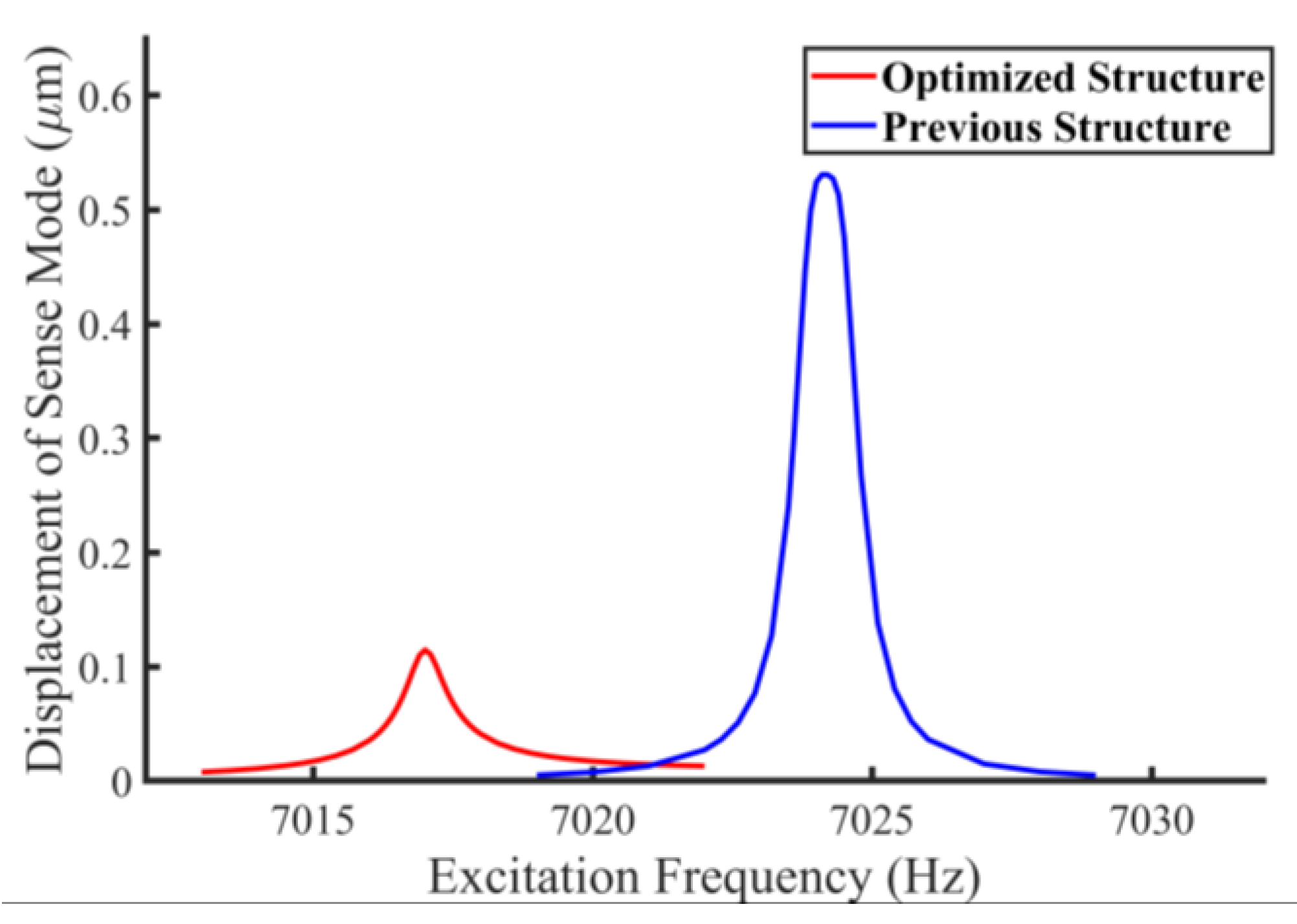
3.1. Optimization of the Gyro Sensor
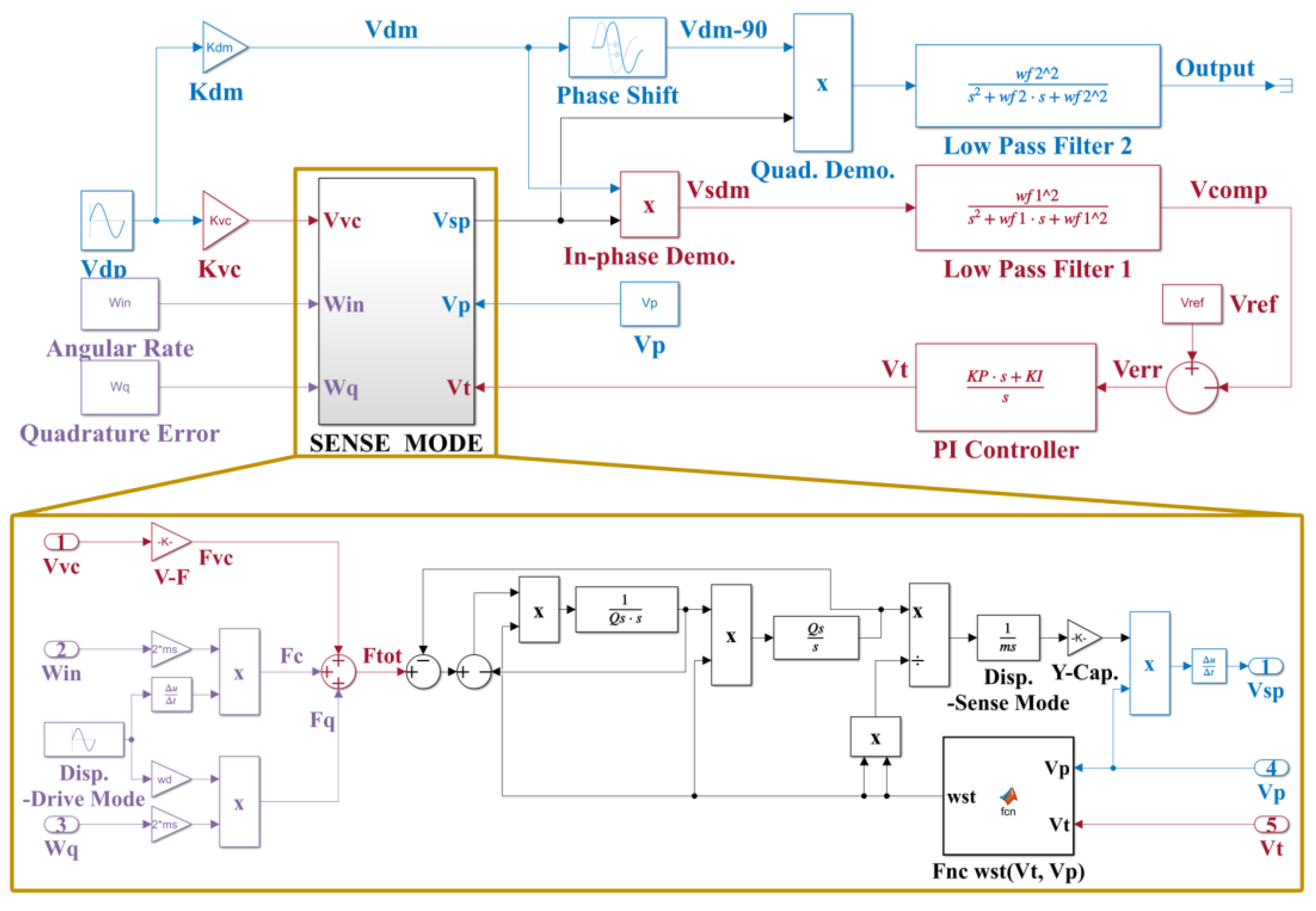
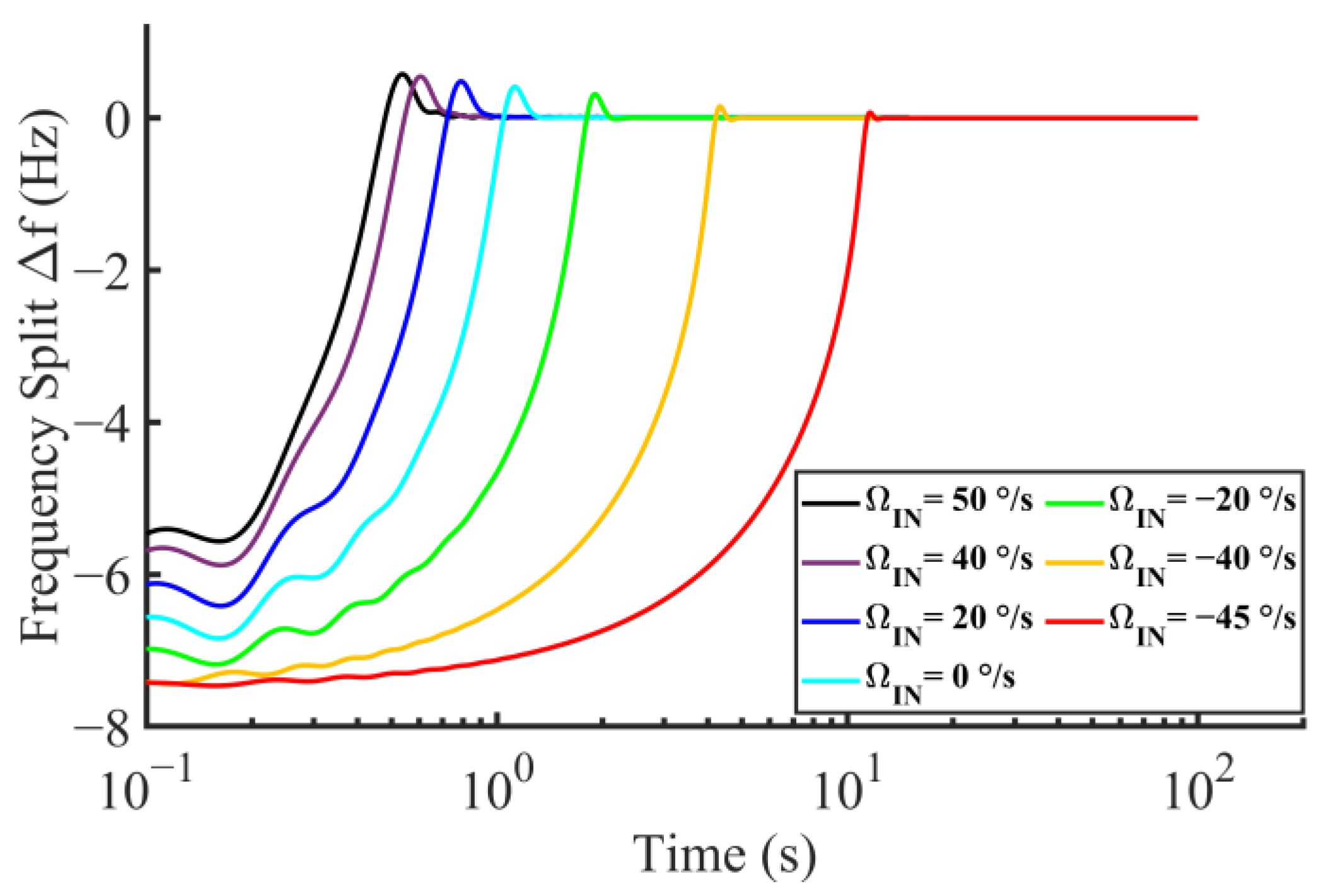
3.2. Simulation System Construction
4. Experiment
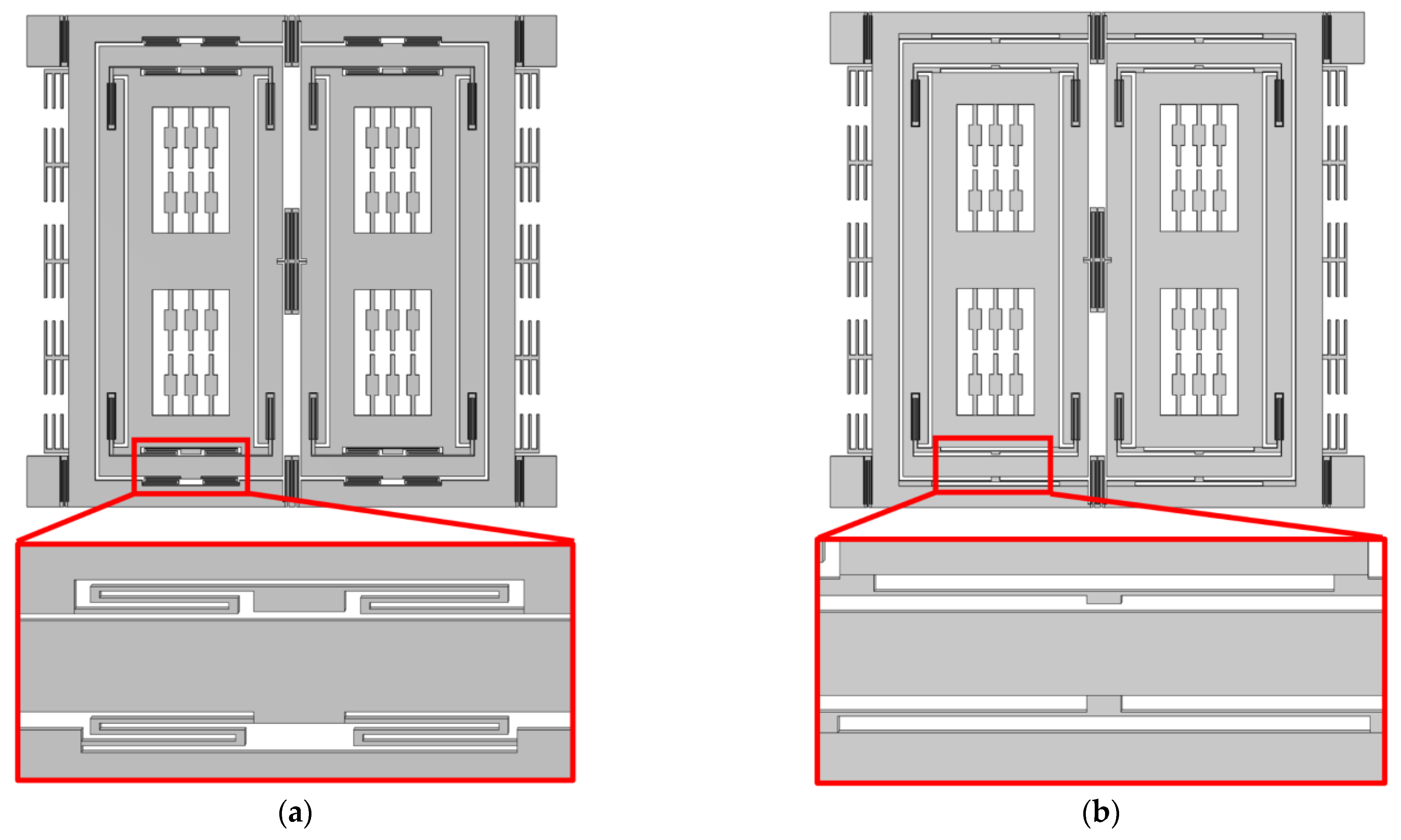
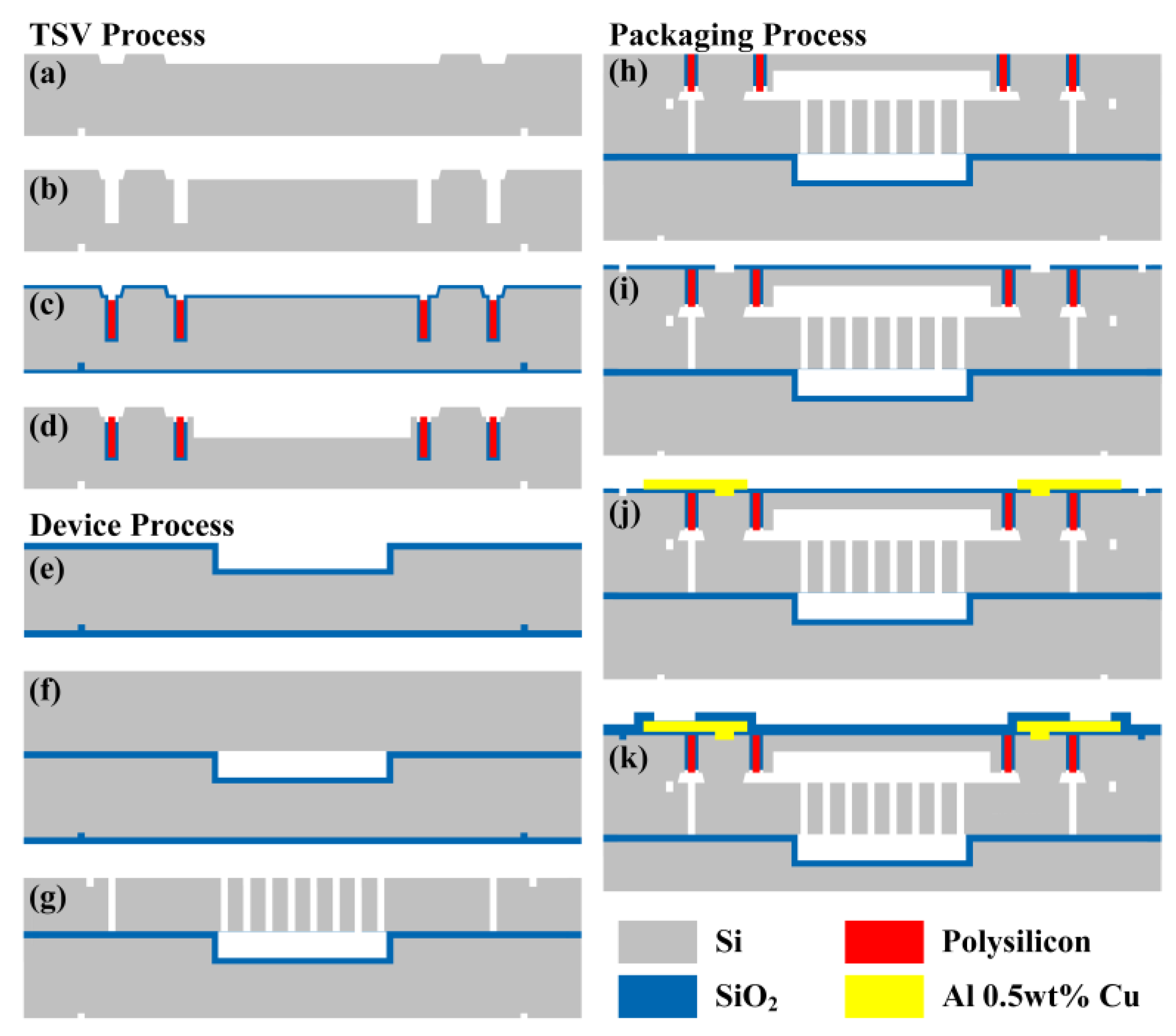
4.1. TFG Sensor Fabrication
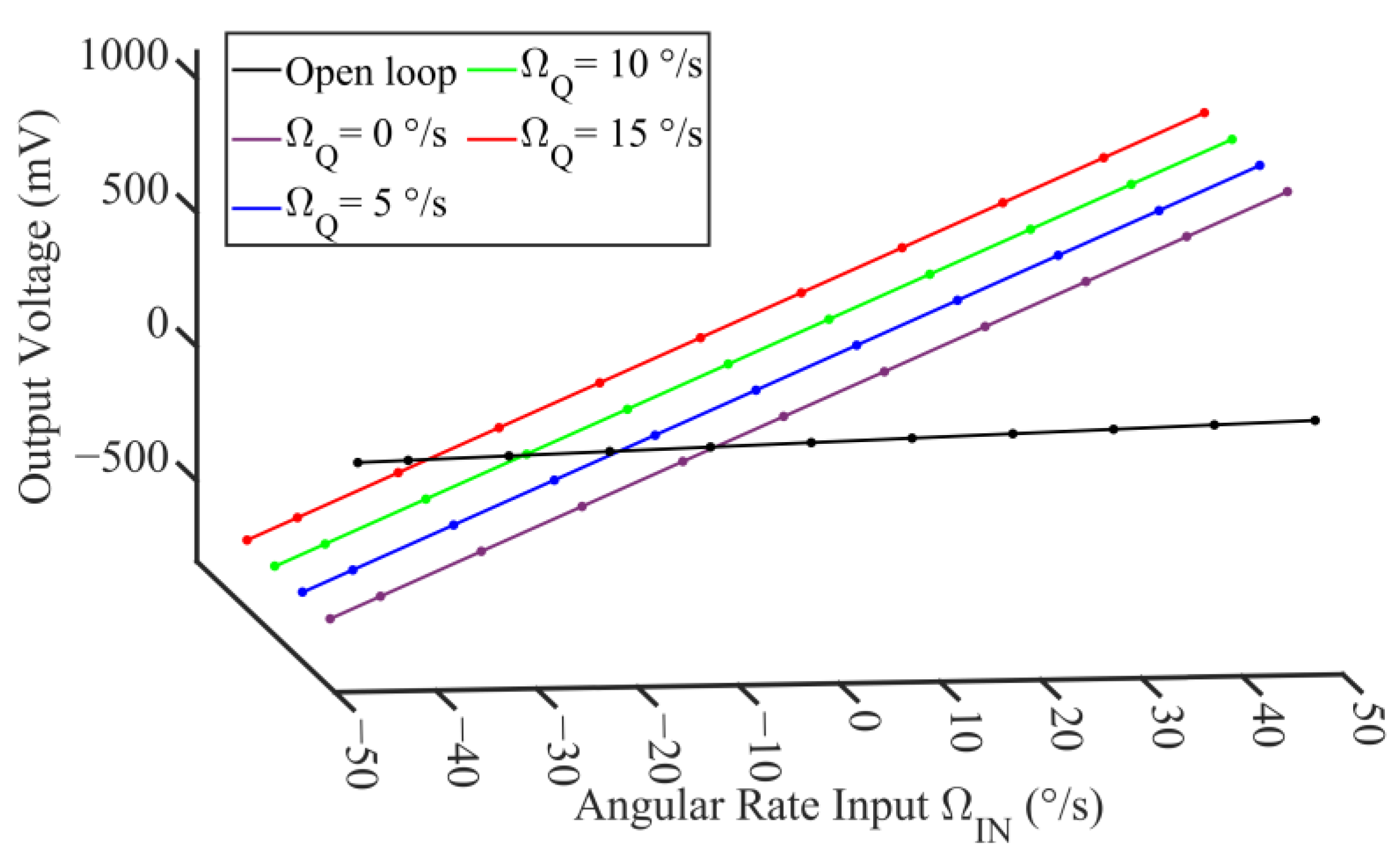
4.2. TFG Sensor Tests
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Passaro, V.; Cuccovillo, A.; Vaiani, L.; De Carlo, M.; Campanella, C. Gyroscope technology and applications: A review in the industrial perspective. Sensors 2017, 17, 2284. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Zhang, W.; Chen, W.; Li, K.; Dai, F.; Cui, F.; Wu, X.; Ma, G.; Xiao, Q. The development of micro-gyroscope technology. J. Micromech. Microeng. 2009, 19, 13001. [Google Scholar] [CrossRef]
- Dell’Olio, F.; Brunetti, G.; Conteduca, D.; Sasanelli, N.; Ciminelli, C.; Armenise, M. Planar photonic gyroscopes for satellite attitude control. In Proceedings of the 2017 7th IEEE International Workshop on Advances in Sensors and Interfaces (IWASI), Venice, Italy, 15–16 June 2017; pp. 167–169. [Google Scholar]
- Woodman, K.; Franks, P.; Richards, M. The nuclear magnetic resonance gyroscope: A review. J. Navig. 1987, 40, 366–384. [Google Scholar] [CrossRef]
- Ezekiel, S.; Arditty, H. Fiber-optic rotation sensors. Tutorial review. In Fiber-Optic Rotation Sensors and Related Technologies: Proceedings of the First International Conference MIT, Cambridge, MA, USA, 9–11 November 1981; Springer: Berlin/Heidelberg, Germany, 1981; pp. 2–26. [Google Scholar]
- Gadola, M.; Buffoli, A.; Sansa, M.; Berthelot, A.; Robert, P.; Langfelder, G. 1.3 mm2 nav-grade NEMS-based gyroscope. J. Microelectromech. Syst. 2021, 30, 513–520. [Google Scholar] [CrossRef]
- Wang, P.; Li, Q.; Zhang, Y.; Wu, Y.; Wu, X.; Xiao, D. Bias thermal stability improvement of mode-matching MEMS gyroscope using mode deflection. J. Microelectromech. Syst. 2023, 32, 1–3. [Google Scholar] [CrossRef]
- Shen, Q.; Chang, H.; Wu, Y.; Xie, J. Turn-on bias behavior prediction for micromachined Coriolis vibratory gyroscopes. Measurement 2019, 131, 380–393. [Google Scholar] [CrossRef]
- She, Q.; Yang, D.; Li, J.; Chang, H. Bias accuracy maintenance under unknown disturbances by multiple homogeneous MEMS gyroscopes fusion. IEEE Trans. Ind. Electron. 2023, 70, 3178–3187. [Google Scholar]
- Shu, Y.; Hirai, Y.; Tsuchiya, T.; Tabata, O. Geometrical compensation of (100) single-crystal silicon mode-matched vibratory ring gyroscope. In Proceedings of the 2018 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Lake Como, Italy, 26–29 March 2018. [Google Scholar]
- Shu, Y.; Yoshikazu, H.; Toshiyuki, T.; Osamu, T. Geometrical compensation for mode-matching of a (100) silicon ring resonator for a vibratory gyroscope. Jpn. J. Appl. Phys. 2019, 58, SDDL06. [Google Scholar] [CrossRef]
- Chen, J.; Tsukamoto, T.; Tanaka, S. Mode-Matched Multi-Ring Disk Resonator Using Single Crystal (100) Silicon. In Proceedings of the 2021 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kailua-Kona, HI, USA, 22–25 March 2021. [Google Scholar]
- Wang, S.; Chen, J.; Tsukamoto, T.; Tanaka, S. Mode-matched multi-ring disk resonator using (100) single crystal silicon. In Proceedings of the 2022 IEEE 35th International Conference on Micro Electro Mechanical Systems Conference (MEMS), Tokyo, Japan, 9–13 January 2022. [Google Scholar]
- Giner, J.; Maeda, D.; Ono, K.; Shkel, A.M.; Sekiguchi, T. MEMS gyroscope with concentrated springs suspensions demonstrating single digit frequency split and temperature robustness. J. Microelectromechanical Syst. 2019, 28, 25–35. [Google Scholar] [CrossRef]
- Chen, J.; Tsukamoto, T.; Tanaka, S. Quad mass gyroscope with 16 ppm frequency mismatch trimmed by focus ion beam. In Proceedings of the 2019 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Naples, FL, USA, 1–5 April 2019. [Google Scholar]
- Schwartz, D.M.; Kim, D.; Stupar, P.; DeNatale, J.; M’Closkey, R.T. Modal parameter tuning of an axisymmetric resonator via mass perturbation. J. Microelectromech. Syst. 2015, 24, 545–555. [Google Scholar] [CrossRef]
- Chen, C.; Wu, K.; Lu, K.; Li, Q.; Wang, C.; Wu, X.; Wang, B.; Xiao, D. A novel mechanical frequency tuning method based on mass-stiffness decoupling for MEMS gyroscopes. Micromachines 2022, 7, 1052. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Wen, H.; Wisher, S.; Norouzpour-Shirazi, A.; Lei, J.Y.; Chen, H.; Ayazi, F. An FPGA-based interface system for high-frequency bulk-acoustic-wave microgyroscopes with in-run automatic mode-matching. IEEE Trans. Instrum. Meas. 2020, 69, 1783–1793. [Google Scholar] [CrossRef]
- He, C.; Zhao, Q.; Huang, Q.; Liu, D.; Yang, Z.; Zhang, D.; Yan, G. A MEMS vibratory gyroscope with real-time mode-matching and robust control for the sense mode. IEEE Sens. J. 2015, 15, 2069–2077. [Google Scholar] [CrossRef]
- Marx, M.; De Dorigo, D.; Nessler, S.; Rombach, S.; Manoli, Y. A 27 μW 0.06 mm2 background resonance frequency tuning circuit based on noise observation for a 1.71 mW CT-ΔΣ MEMS gyroscope readout system with 0.9°/h bias instability. IEEE J. Solid-State Circuits 2018, 53, 174–186. [Google Scholar] [CrossRef]
- Marx, M.; Cuignet, X.; Nessler, S.; De Dorigo, D.; Manoli, Y. An automatic mems gyroscope mode matching circuit based on noise observation. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 743–747. [Google Scholar] [CrossRef]
- Ding, X.; Ruan, Z.; Jia, J.; Huang, L.; Li, H.; Zhao, L. In-run mode-matching of mems gyroscopes based on power symmetry of readout signal in sense mode. IEEE Sens. J. 2021, 21, 23806–23817. [Google Scholar] [CrossRef]
- Cheng, L.; Yang, B.; Guo, X.; Wu, L. A digital calibration technique of mems gyroscope for closed-loop mode-matching control. Micromachines 2019, 10, 496. [Google Scholar]
- Sharma, A.; Zaman, M.F.; Ayazi, F. A sub-0.2°/hr bias drift micromechanical silicon gyroscope with automatic CMOS mode-matching. IEEE J. Solid-State Circuits 2009, 44, 1593–1608. [Google Scholar] [CrossRef]
- Sonmezoglu, S.; Alper, S.E.; Akin, T. A high performance automatic mode-matched MEMS gyroscope with an improved thermal stability of the scale factor. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013. [Google Scholar]
- Yesil, F.; Alper, S.E.; Akin, T. An automatic mode matching system for a high Q-factor MEMS gyroscope using a decoupled perturbation signal. In Proceedings of the Transducers—2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015. [Google Scholar]
- Xu, L.; Li, H.; Ni, Y.; Liu, J.; Huang, L. Frequency tuning of work modes in z-axis dual-mass silicon microgyroscope. J. Sens. 2014, 2014, 891735. [Google Scholar] [CrossRef]
- Xu, L.; Li, H.; Yang, C.; Huang, L. Comparison of three automatic mode-matching methods for silicon micro-gyroscopes based on phase characteristic. IEEE Sens. J. 2015, 16, 610–619. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Y.; Yan, J. Mode-matching control system design of silicon MEMS gyroscope. J. Chin. Inert. Technol. 2017. [Google Scholar] [CrossRef]
- Ruan, Z.; Ding, X.; Qin, Z.; Jia, J.; Li, H. Automatic mode-matching method for MEMS disk resonator gyroscopes based on virtual coriolis force. Micromachines 2020, 11, 210. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.; Zhao, H.; Bu, F.; Yu, L.; Xu, D.; Guo, S. An automatically mode-matched MEMS gyroscope based on phase characteristics. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 2466–2470. [Google Scholar]
- Wang, P.; Xu, Y.; Song, G.; Li, Q.; Wu, Y.; Wu, X.; Xiao, D. Calibration and compensation of the misalignment angle errors for the disk resonator gyroscopes. In Proceedings of the 2020 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Hiroshima, Japan, 23–26 March 2020; pp. 1–3. [Google Scholar]
- Wu, Z.; Feng, R.; Sun, C.; Wang, P.; Wu, G. A dual-mass fully decoupled MEMS gyroscope with optimized structural design for minimizing mechanical quadrature coupling. Microelectron. Eng. 2023, 269, 111918. [Google Scholar] [CrossRef]
- Adams, S.G.; Bertsch, F.M.; Shaw, K.A.; Hartwell, P.G.; MacDonald, N.C.; Moon, F.C. Capacitance based tunable micromechanical resonators. In Proceedings of the International Conference on Solid-State Sensors and Actuators Conference, Stockholm, Sweden, 25–29 June 1995; pp. 438–441. [Google Scholar]
- Hao, Y.; Xie, J.; Yuan, W.; Chang, H. Dicing-free SOI process based on wet release technology. Micro Nano Lett. 2016, 11, 775–778. [Google Scholar] [CrossRef]
- Adams, S.G.; Bertsch, F.M.; Shaw, K.A.; MacDonald, N.C. Independent tuning of linear and nonlinear stiffness coefficients. J. Microelectromech. Syst. 1998, 7, 172–180. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| vacuum dielectric constant | |
| mass of the sense mode | |
| , stiffness of sense mode | |
| stiffness of the sense mode when | |
| thickness of the device layer | |
| overlap length of the combs | |
| upper gap of the electrodes | |
| lower gap of the electrodes | |
| number of capacitor pairs for the sense pick-up | |
| number of capacitor pairs for the VCF feedback | |
| number of capacitor pairs for frequency tuning |
| Parameter | Value |
|---|---|
| 7000 Hz | |
| 6990 Hz | |
| 8000 | |
| −45°/s~50°/s | |
| 50°/s | |
| 5°/s~15°/s |
| (°/s) | ||||||
|---|---|---|---|---|---|---|
| −45 | −20 | 0 | 20 | 50 | ||
| (°/s) | 5 | 0.41 | 0.09 | 0.06 | 0.05 | 0.04 |
| 10 | 0.88 | 0.16 | 0.10 | 0.08 | 0.08 | |
| 15 | 1.36 | 0.15 | 0.15 | 0.11 | 0.09 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Yuan, W.; Xue, Y.; Chang, H.; Shen, Q. Virtual Coriolis-Force-Based Mode-Matching Micromachine-Optimized Tuning Fork Gyroscope without a Quadrature-Nulling Loop. Micromachines 2023, 14, 1704. https://doi.org/10.3390/mi14091704
Wu Y, Yuan W, Xue Y, Chang H, Shen Q. Virtual Coriolis-Force-Based Mode-Matching Micromachine-Optimized Tuning Fork Gyroscope without a Quadrature-Nulling Loop. Micromachines. 2023; 14(9):1704. https://doi.org/10.3390/mi14091704
Chicago/Turabian StyleWu, Yixuan, Weizheng Yuan, Yanjun Xue, Honglong Chang, and Qiang Shen. 2023. "Virtual Coriolis-Force-Based Mode-Matching Micromachine-Optimized Tuning Fork Gyroscope without a Quadrature-Nulling Loop" Micromachines 14, no. 9: 1704. https://doi.org/10.3390/mi14091704