
Experimental Investigation of Vibration Isolator for Large Aperture Electromagnetic MEMS Micromirror
Abstract
:1. Introduction
2. Deformation Analysis of Micromirror
2.1. Modal Analysis
2.2. Deformation Analysis
3. Design of Mechanical LPF
3.1. Principle
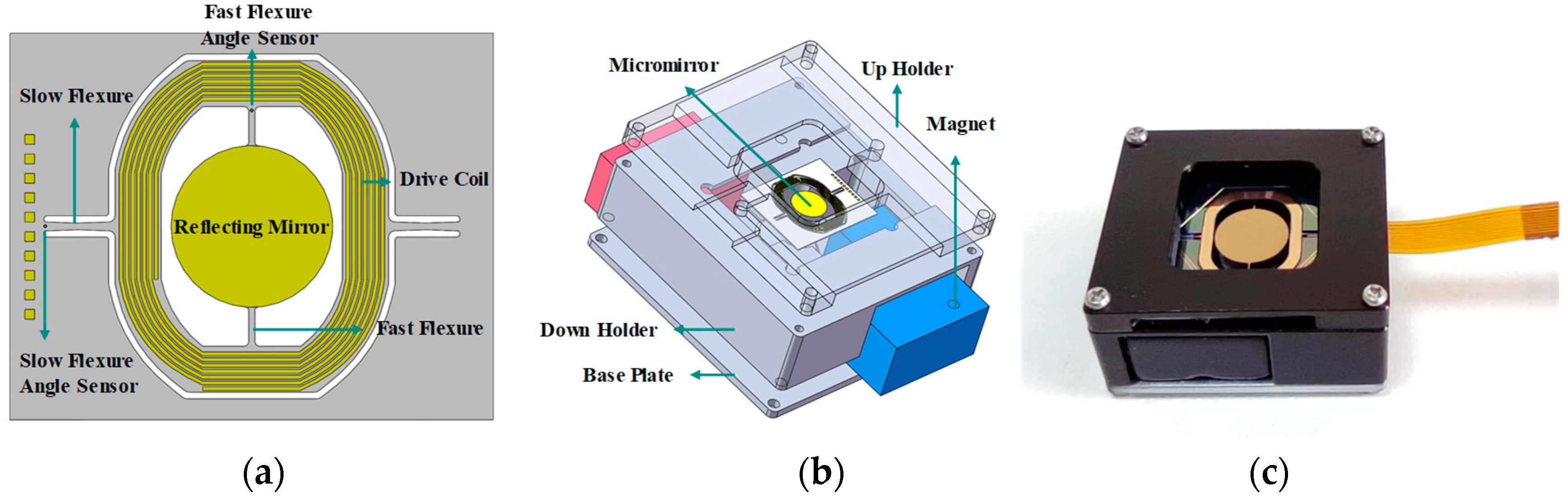
3.2. Structure Design
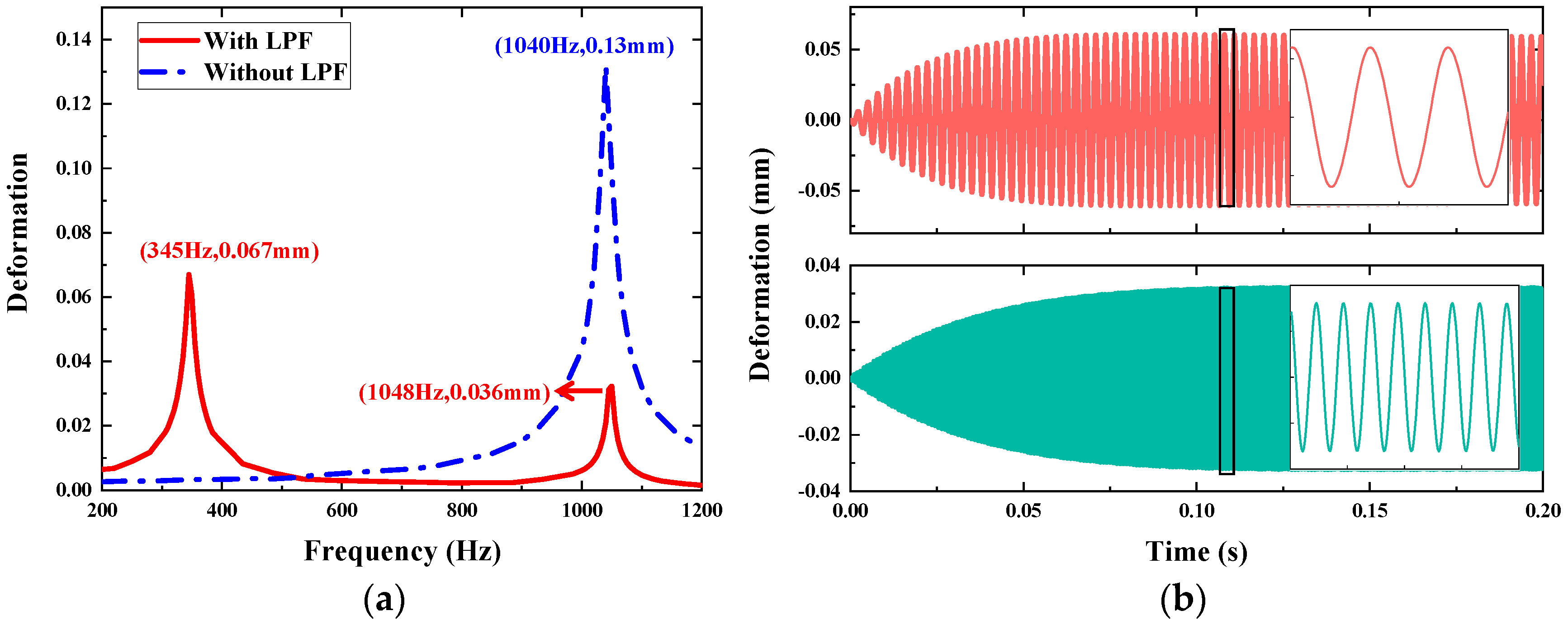
3.3. Deformation Analysis of Micromirror with LPF
4. Experiments and Results
4.1. Piezoresistive Sense Principle
4.2. Experimental Setup
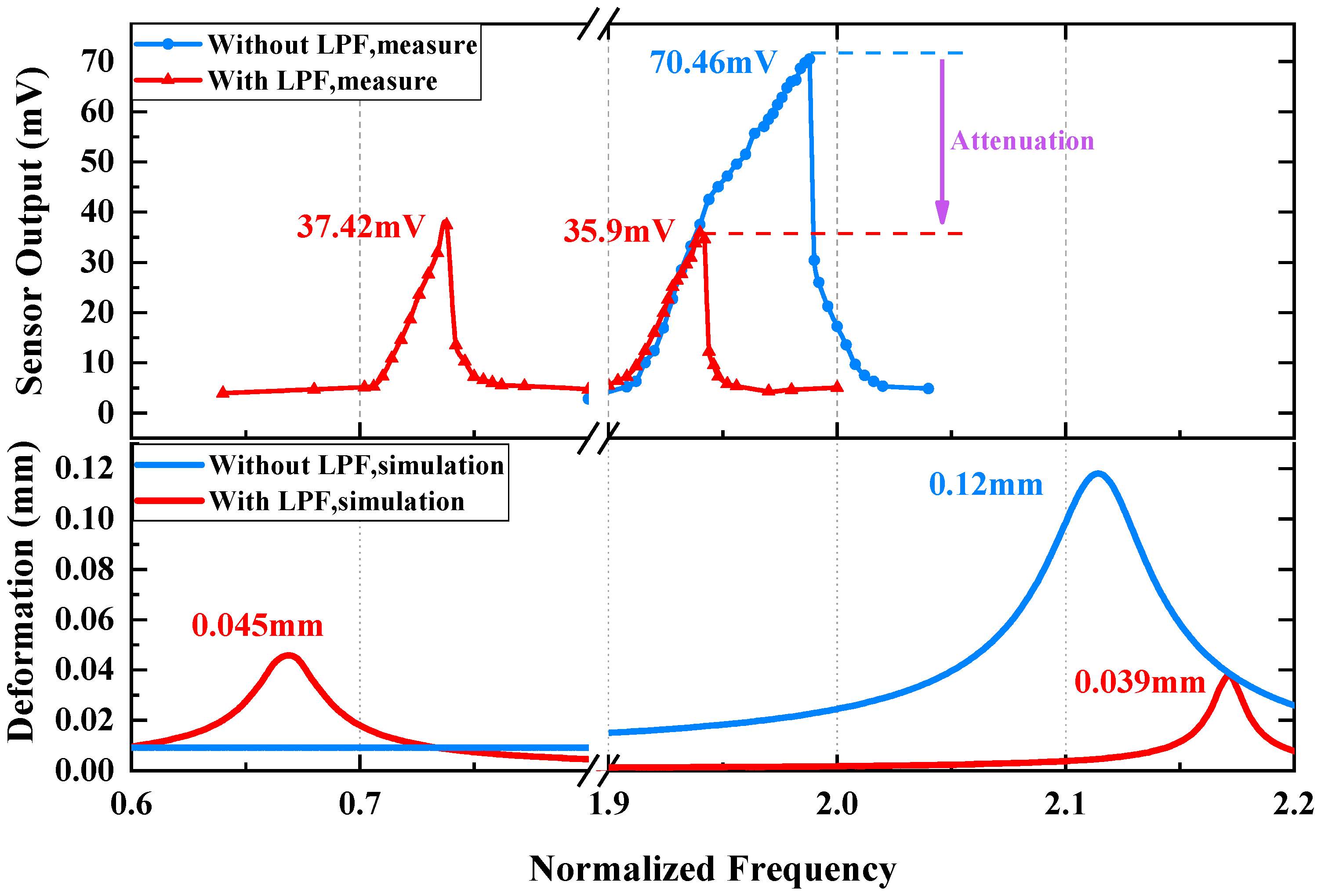
4.3. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, J.; Liu, X.; Shi, Q.; He, T.; Sun, Z.; Guo, X.; Liu, W.; Sulaiman, O.B.; Dong, B.; Lee, C. Development Trends and Perspectives of Future Sensors and MEMS/NEMS. Micromachines 2019, 11, 7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined Inertial Sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef]
- Gong, X.; Kuo, Y.-C.; Zhou, G.; Wu, W.-J.; Liao, W.-H. An Aerosol Deposition Based MEMS Piezoelectric Accelerometer for Low Noise Measurement. Microsyst. Nanoeng. 2023, 9, 23. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Shim, E.S.; Choi, W.; Kim, Y.; Kwon, Y.; Cho, D.I. A Non-Contact-Type RF MEMS Switch for 24-GHz Radar Applications. J. Microelectromech. Syst. 2009, 18, 163–173. [Google Scholar] [CrossRef]
- Groschup, R.; Grosse, C. MEMS Microphone Array Sensor for Air-Coupled Impact-Echo. Sensors 2015, 15, 14932–14945. [Google Scholar] [CrossRef] [Green Version]
- Holmstrom, S.T.S.; Baran, U.; Urey, H. MEMS Laser Scanners: A Review. J. Microelectromech. Syst. 2014, 23, 259–275. [Google Scholar] [CrossRef]
- Yano, M.; Yamagishi, F.; Tsuda, T. Optical MEMS for Photonic Switching-Compact and Stable Optical Crossconnect Switches for Simple, Fast, and Flexible Wavelength Applications in Recent Photonic Networks. IEEE J. Sel. Top. Quantum Electron. 2005, 11, 383–394. [Google Scholar] [CrossRef]
- Yu, H.; Zhou, P.; Wang, K.; Huang, Y.; Shen, W. Optimization of MOEMS Projection Module Performance with Enhanced Piezoresistive Sensitivity. Micromachines 2020, 11, 651. [Google Scholar] [CrossRef]
- Yoo, H.W.; Druml, N.; Brunner, D.; Schwarzl, C.; Thurner, T.; Hennecke, M.; Schitter, G. MEMS-Based Lidar for Autonomous Driving. E I Elektrotechnik Informationstechnik 2018, 135, 408–415. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Watkins, C.; Xie, H. MEMS Mirrors for LiDAR: A Review. Micromachines 2020, 11, 456. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, G.; You, Z. Improved Sampling Scheme for LiDAR in Lissajous Scanning Mode. Microsyst. Nanoeng. 2022, 8, 64. [Google Scholar] [CrossRef] [PubMed]
- Hofmann, U.; Aikio, M.; Janes, J.; Senger, F.; Stenchly, V.; Hagge, J.; Quenzer, H.-J.; Weiss, M.; von Wantoch, T.; Mallas, C.; et al. Resonant Biaxial 7-Mm MEMS Mirror for Omnidirectional Scanning. J. Micro/Nanolith. MEMS MOEMS 2013, 13, 011103. [Google Scholar] [CrossRef]
- Jiang, B.; Peng, M.; Liu, Y.; Zhou, T.; Su, Y. The Fabrication of 2D Micromirror with Large Electromagnetic Driving Forces. Sens. Actuators A Phys. 2019, 286, 163–168. [Google Scholar] [CrossRef]
- Peng, T.; You, Z. Reliability of MEMS in Shock Environments: 2000–2020. Micromachines 2021, 12, 1275. [Google Scholar] [CrossRef]
- Lall, P.; Panchagade, D.R.; Choudhary, P.; Gupte, S.; Suhling, J.C. Failure-Envelope Approach to Modeling Shock and Vibration Survivability of Electronic and MEMS Packaging. IEEE Trans. Compon. Packag. Technol. 2008, 31, 104–113. [Google Scholar] [CrossRef]
- Huang, Y.; Sai, A.; Doraiswami, R.; Osterman, M.; Pecht, M. MEMS Reliability Review. IEEE Trans. Device Mater. Reliab. 2012, 12, 482–493. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Broas, M.; Makkonen, J.; Mattila, T.T.; Hokka, J.; Paulasto-Krockel, M. Shock Impact Reliability and Failure Analysis of a Three-Axis MEMS Gyroscope. J. Microelectromech. Syst. 2014, 23, 347–355. [Google Scholar] [CrossRef]
- Bottenfield, B.; Bond, A.G.; Kranz, M.S.; Dean, R.N.; Adams, M.L. Variations in Micromachined Isolator Geometries for Sensor Performance in Harsh Environments. IEEE Trans. Compon. Packag. Manuf. Technol. 2020, 10, 659–668. [Google Scholar] [CrossRef]
- Tao, Y.-K.; Liu, Y.-F.; Dong, J.-X. Flexible Stop and Double-Cascaded Stop to Improve Shock Reliability of MEMS Accelerometer. Microelectron. Reliab. 2014, 54, 1328–1337. [Google Scholar] [CrossRef]
- Dean, R.; Flowers, G.; Sanders, N.; Horvath, R.; Kranz, M.; Whitley, M. Micromachined Vibration Isolation Filters to Enhance Packaging for Mechanically Harsh Environments. J. Microelectron. Electron. Packag. 2005, 2, 223–231. [Google Scholar] [CrossRef]
- Yoon, S.W.; Lee, S.; Perkins, N.C.; Najafi, K. Analysis and Wafer-Level Design of a High-Order Silicon Vibration Isolator for Resonating MEMS Devices. J. Micromech. Microeng. 2010, 21, 015017. [Google Scholar] [CrossRef]
- Yao, Z.; Zega, V.; Su, Y.; Zhou, Y.; Ren, J.; Zhang, J.; Corigliano, A. Design, Fabrication and Experimental Validation of a Metaplate for Vibration Isolation in MEMS. J. Microelectromech. Syst. 2020, 29, 1401–1410. [Google Scholar] [CrossRef]
- Bottenfield, B.; Bond, A.G.; English, B.A.; Flowers, G.T.; Dean, R.N.; Adams, M.L. Microfibrous Mesh and Polymer Damping of Micromachined Vibration Isolators. IEEE Trans. Compon. Packag. Manuf. Technol. 2021, 11, 543–556. [Google Scholar] [CrossRef]
- Fang, X.-Y.; Li, X.-Y.; Hu, K.-M.; Yan, G.; Wu, J.-H.; Zhang, W.-M. Destructive Reliability Analysis of Electromagnetic MEMS Micromirror under Vibration Environment. IEEE J. Sel. Top. Quantum Electron. 2022, 28, 1–8. [Google Scholar] [CrossRef]
- Fang, X.-Y.; Hu, K.-M.; Yan, G.; Wu, Z.-Y.; Wu, J.-H.; Zhang, W.-M. Shock Destructive Reliability Analysis of Electromagnetic MEMS Micromirror for Automotive LiDAR. J. Microelectromech. Syst. 2022, 31, 134–142. [Google Scholar] [CrossRef]
- Yoo, H.W.; Riegler, R.; Brunner, D.; Albert, S.; Thurner, T.; Schitter, G. Experimental Evaluation of Vibration Influence on a Resonant MEMS Scanning System for Automotive Lidars. IEEE Trans. Ind. Electron. 2022, 69, 3099–3108. [Google Scholar] [CrossRef]
- Hopcroft, M.A.; Nix, W.D.; Kenny, T.W. What Is the Young’s Modulus of Silicon? J. Microelectromech. Syst. 2010, 19, 229–238. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.P.; Chen, H.L. A Study on the Coupled Dynamic Characteristics for a Torsional Micromirror. Microsyst. Technol. 2005, 11, 1301–1309. [Google Scholar] [CrossRef]
- Younis, M.I.; Alsaleem, F.; Jordy, D. The Response of Clamped–Clamped Microbeams under Mechanical Shock. Int. J. Non-Linear Mech. 2007, 42, 643–657. [Google Scholar] [CrossRef]
- Yoon, S. Vibration Isolation and Shock Protection for MEMS. Ph.D. Thesis, The University of Michigan, Ann Arbor, MI, USA, 2009. [Google Scholar]
- Merlijn van Spengen, W. MEMS Reliability from a Failure Mechanisms Perspective. Microelectron. Reliab. 2003, 43, 1049–1060. [Google Scholar] [CrossRef]
- Nagel, N. Beryllium and Copper-Beryllium Alloys. ChemBioEng Rev. 2017, 5, 30–33. [Google Scholar] [CrossRef]
- Altenberger, I.; Kuhn, H.A.; Müller, H.R.; Mhaede, M.; Gholami–Kermanshahi, M.; Wagner, L. Material Properties of High-Strength Beryllium-Free Copper Alloys. Int. J. Mater. Prod. Technol. 2015, 50, 124–146. [Google Scholar] [CrossRef]
- Scott, J.; Enikov, E.T. Novel Temperature Compensation Technique for Force-Sensing Piezoresistive Devices. J. Micromech. Microeng. 2011, 21, 115017. [Google Scholar] [CrossRef]
- Kanda, Y. A Graphical Representation of the Piezoresistance Coefficients in Silicon. IEEE Trans. Electron. Devices 1982, 29, 64–70. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Width of slow flexure | 210 μm |
| Length of slow flexure | 1980 μm |
| Thickness of slow flexure | 55 μm |
| Density of silicon | 2.33 × 103 Kg/m3 |
| Density of gold | 19.3 × 103 Kg/m3 |
| Young’s modulus of silicon | 130 GPa |
| Poisson’s ratio of silicon | 0.28 |
| Shear modulus of silicon | 79.6 GPa |
| Parameters | Value |
|---|---|
| Width of beam | 2.5 mm |
| Length of beam | 13.75 mm |
| Thickness of beam | 300 μm |
| Thickness of platform | 600 μm |
| Mass of equivalent mass | 1.6 g |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, L.; Shan, Y.; Wang, J.; Li, H.; Wang, K.; Yu, H.; Zhou, P.; Shen, W. Experimental Investigation of Vibration Isolator for Large Aperture Electromagnetic MEMS Micromirror. Micromachines 2023, 14, 1490. https://doi.org/10.3390/mi14081490
Qian L, Shan Y, Wang J, Li H, Wang K, Yu H, Zhou P, Shen W. Experimental Investigation of Vibration Isolator for Large Aperture Electromagnetic MEMS Micromirror. Micromachines. 2023; 14(8):1490. https://doi.org/10.3390/mi14081490
Chicago/Turabian StyleQian, Lei, Yameng Shan, Junduo Wang, Haoxiang Li, Kewei Wang, Huijun Yu, Peng Zhou, and Wenjiang Shen. 2023. "Experimental Investigation of Vibration Isolator for Large Aperture Electromagnetic MEMS Micromirror" Micromachines 14, no. 8: 1490. https://doi.org/10.3390/mi14081490