
Numerical Solution of the Electric Field and Dielectrophoresis Force of Electrostatic Traveling Wave System
Abstract
:1. Introduction
1.1. Background of the Electric Potential Problem
1.2. Methods Development
2. Theory of the Charge Simulation Method (CSM)
2.1. Basic Principle
2.2. Implementation of CSM
2.3. Accuracy Evaluation
3. Theory of the Boundary Element Method (BEM)
3.1. Formulation
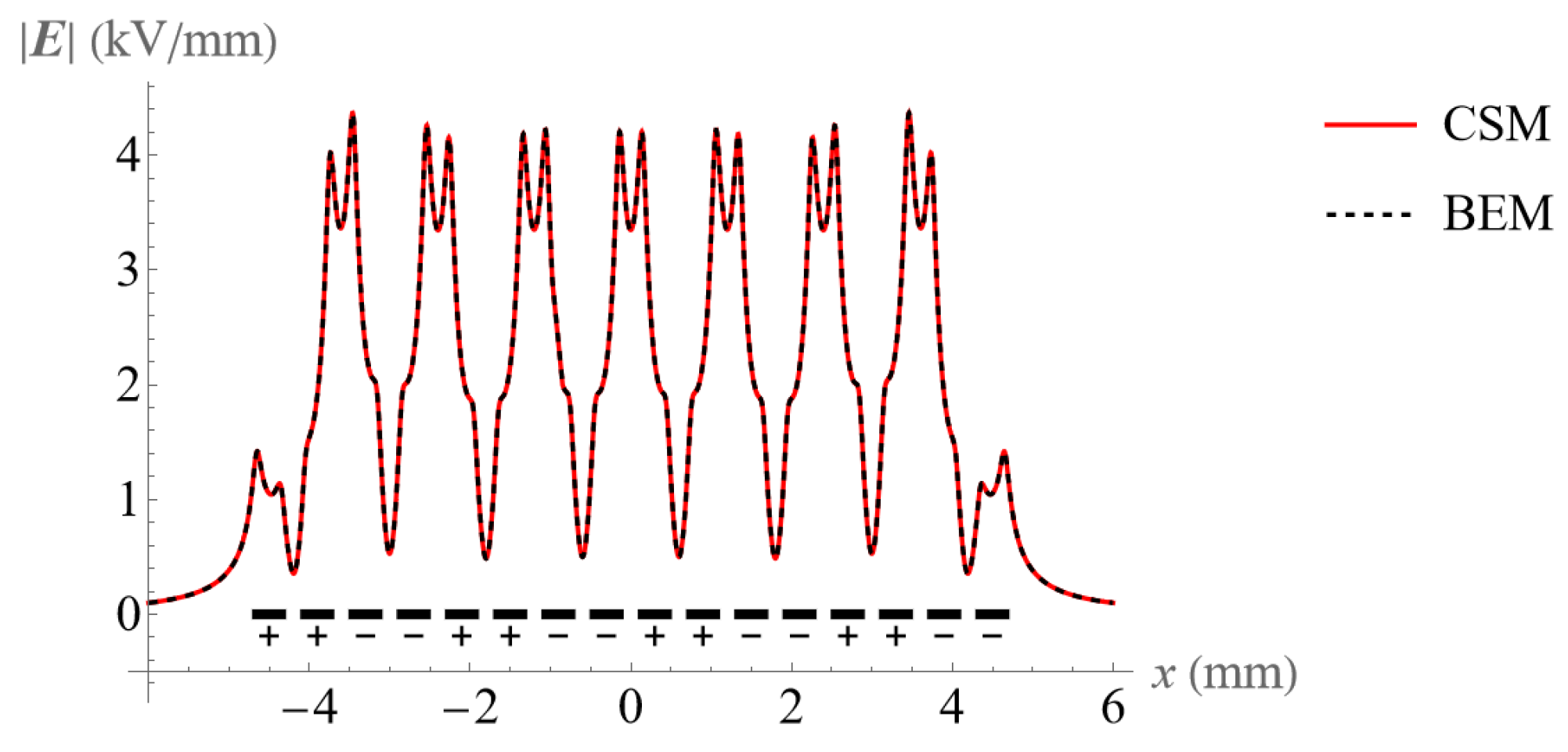
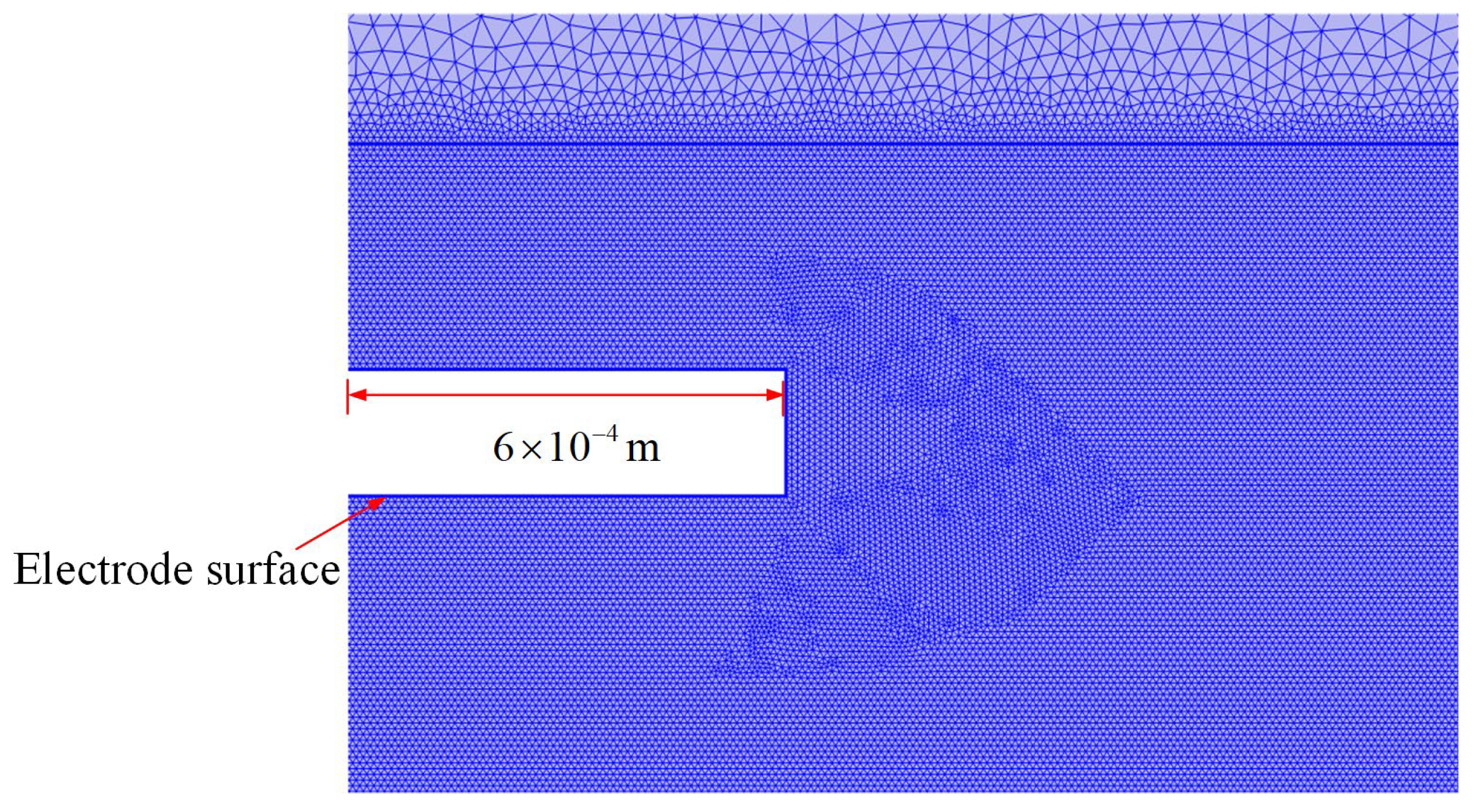
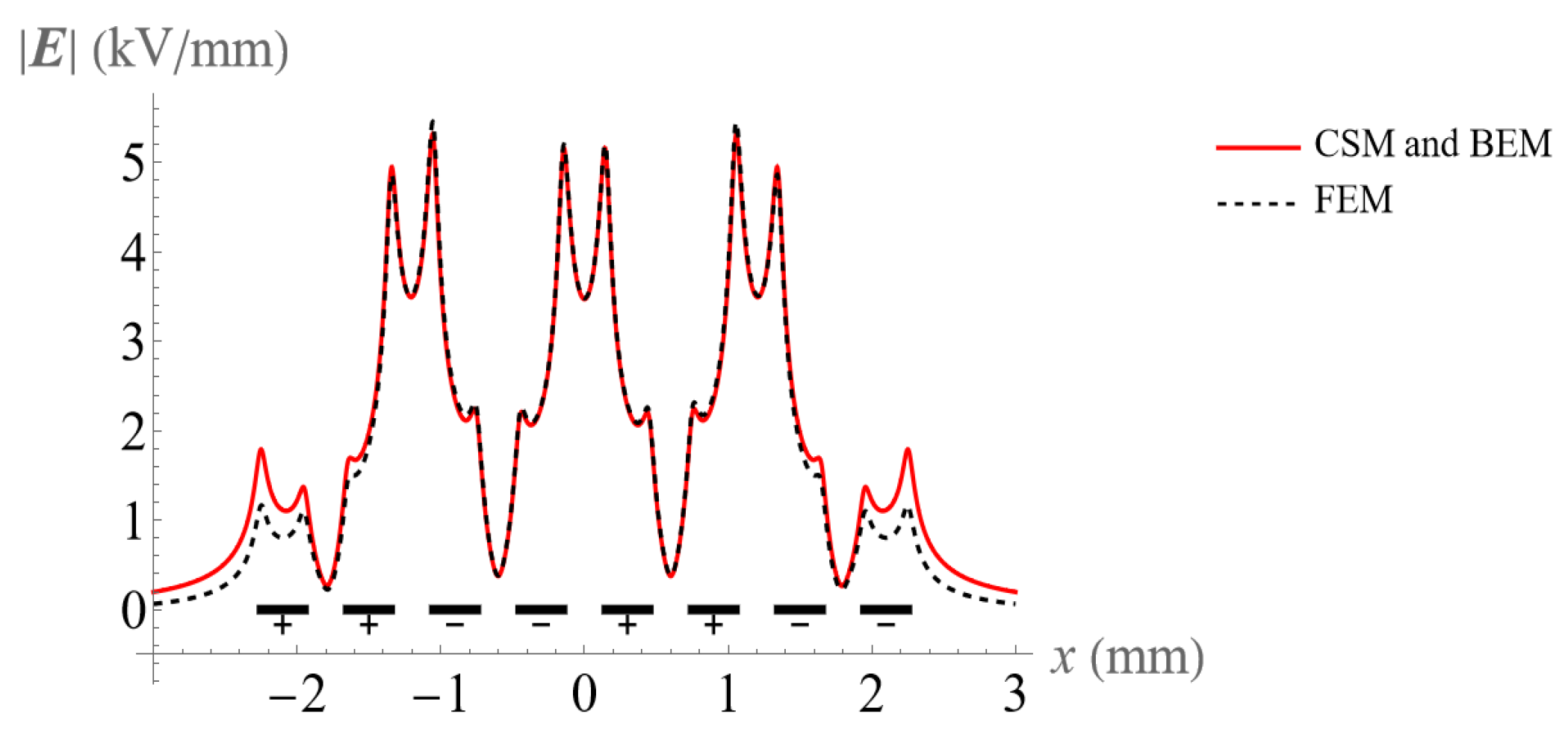
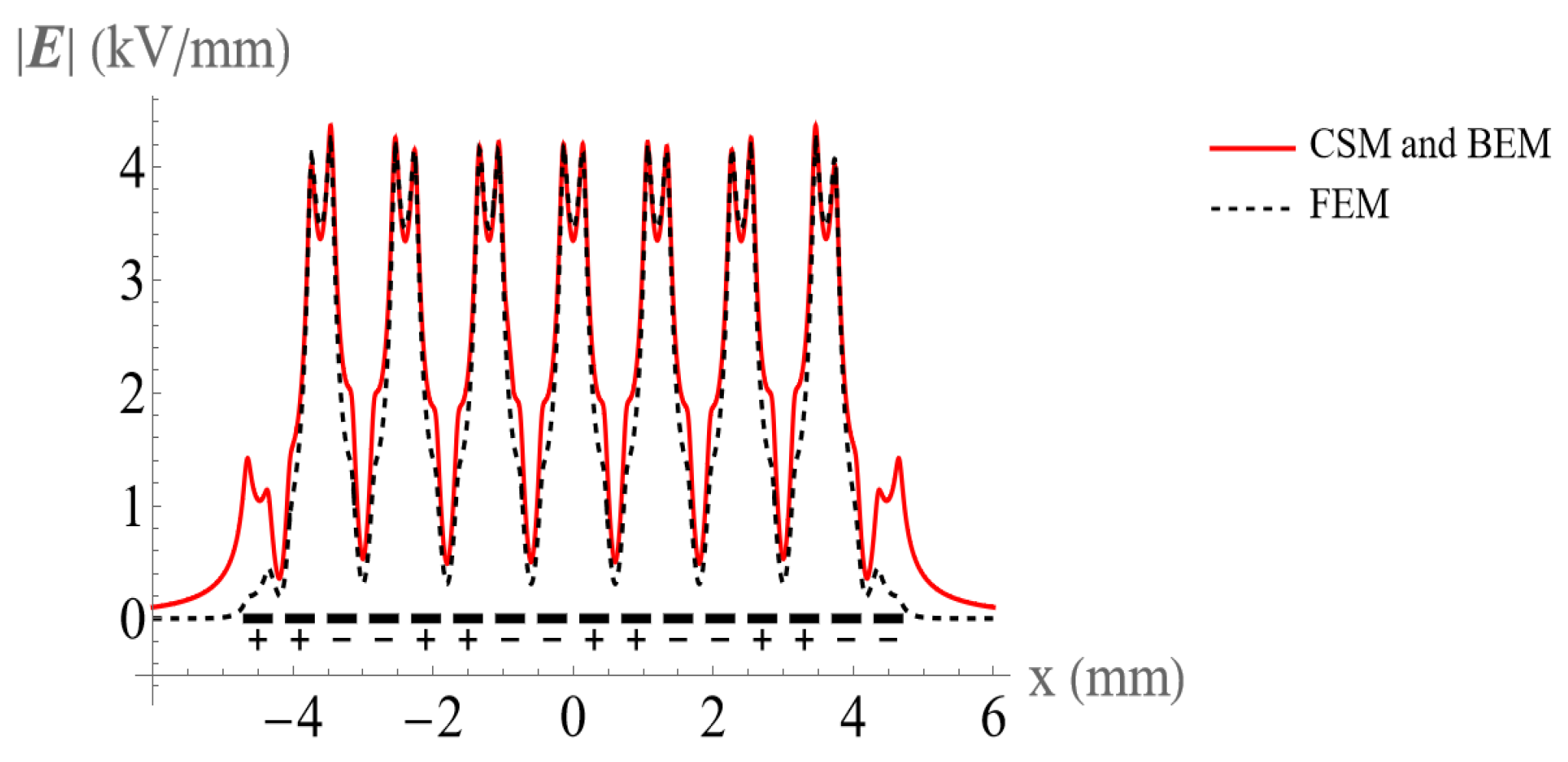
3.2. Comparison of CSM, BEM, and FEM
4. Electric Field and Dielectrophoretic Component Analysis
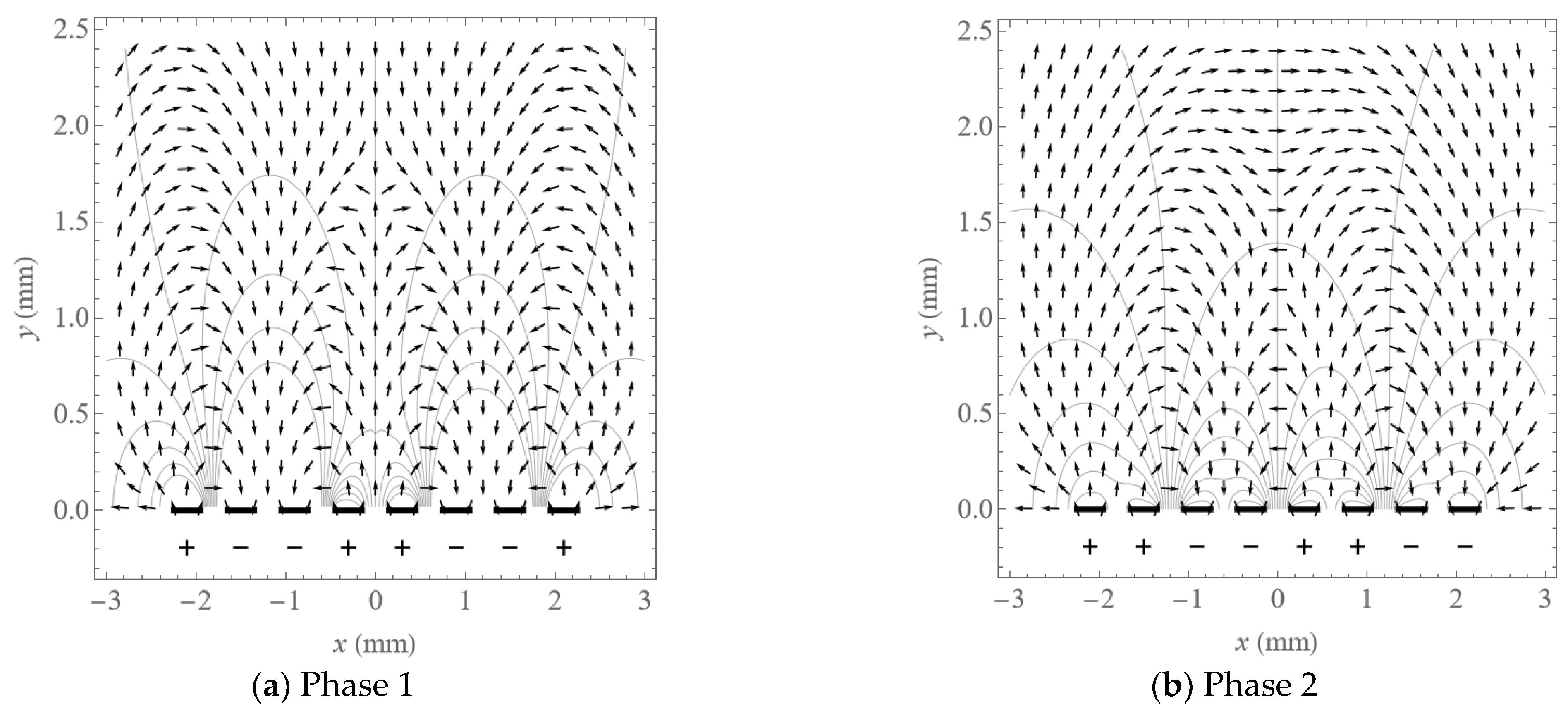
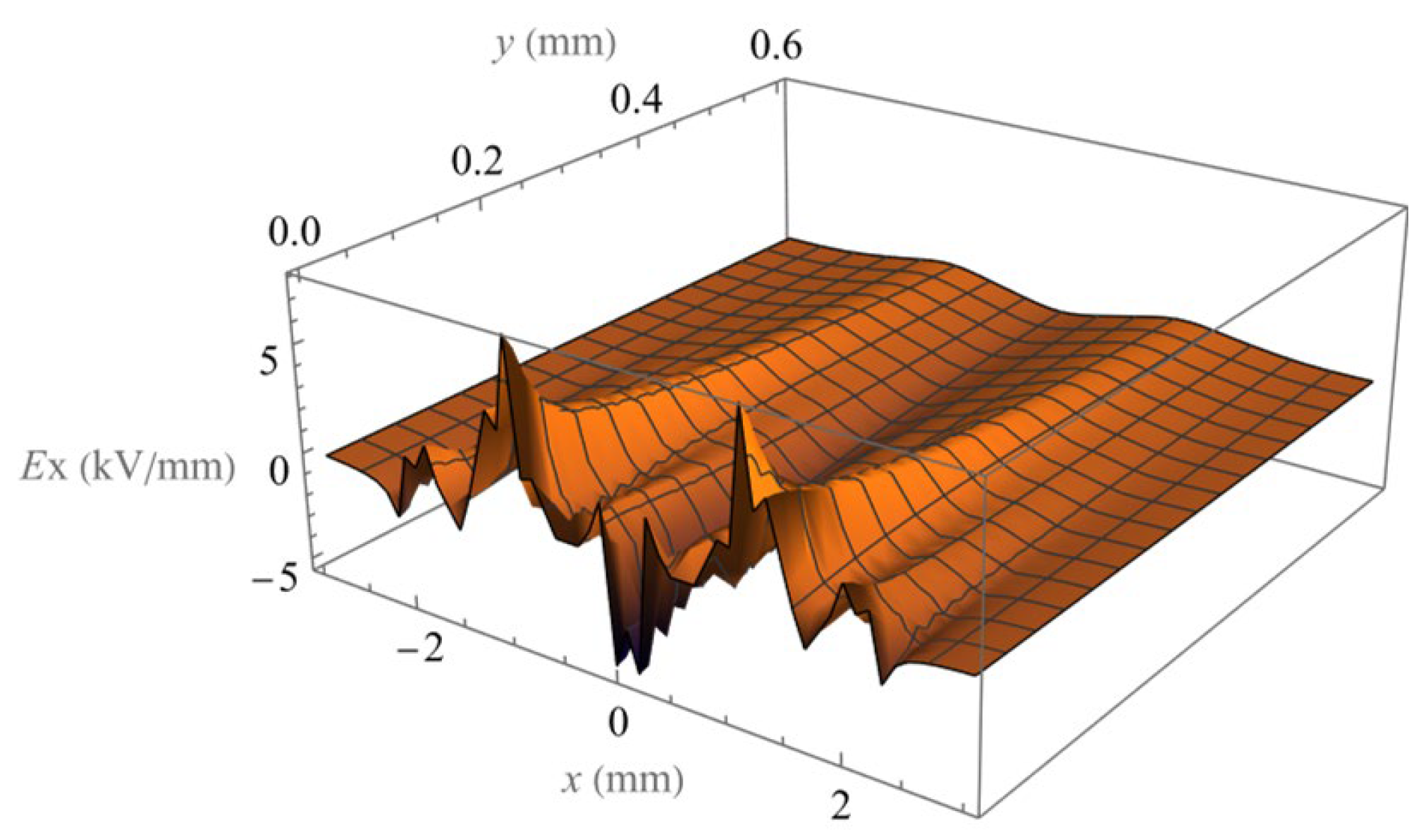
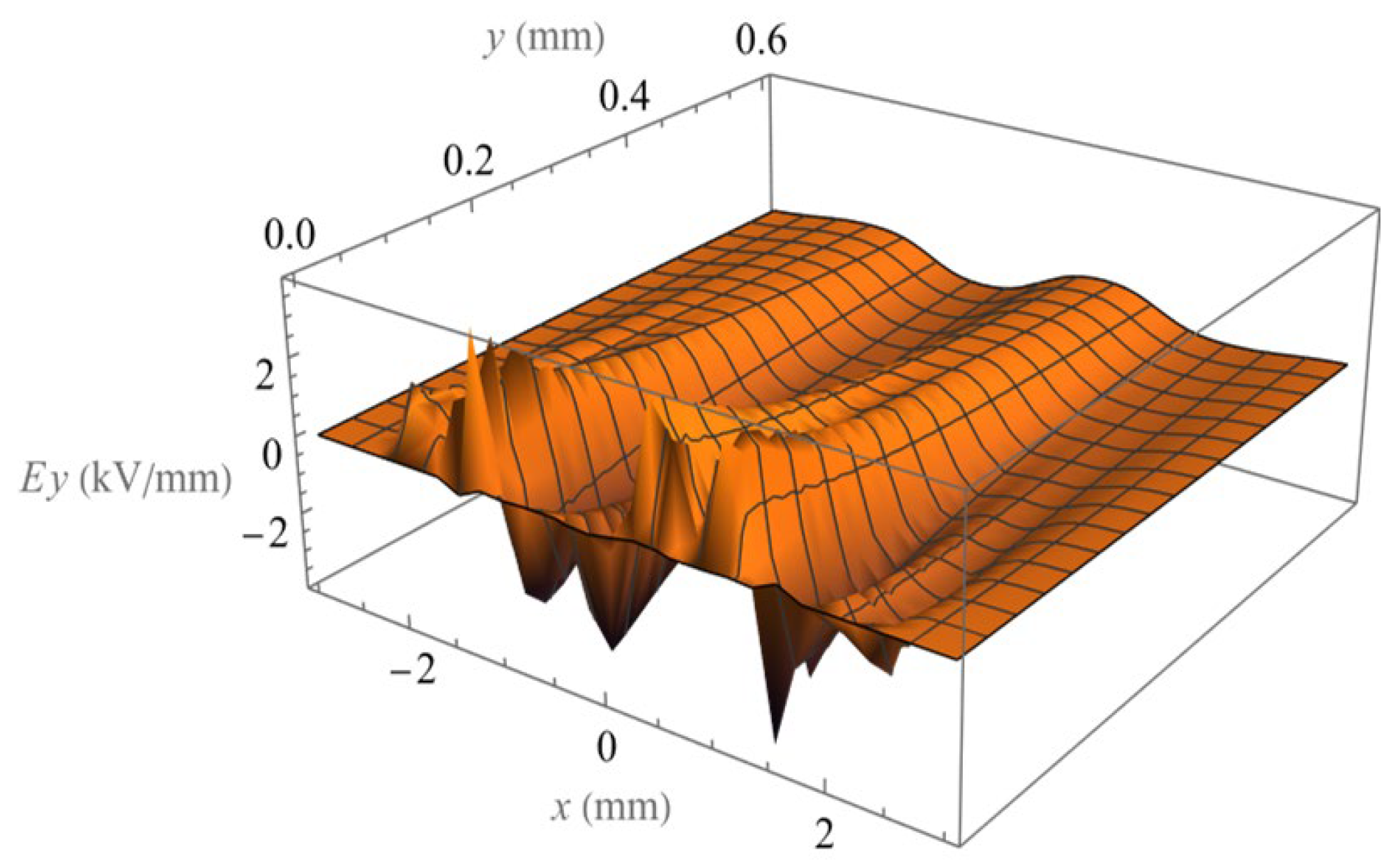
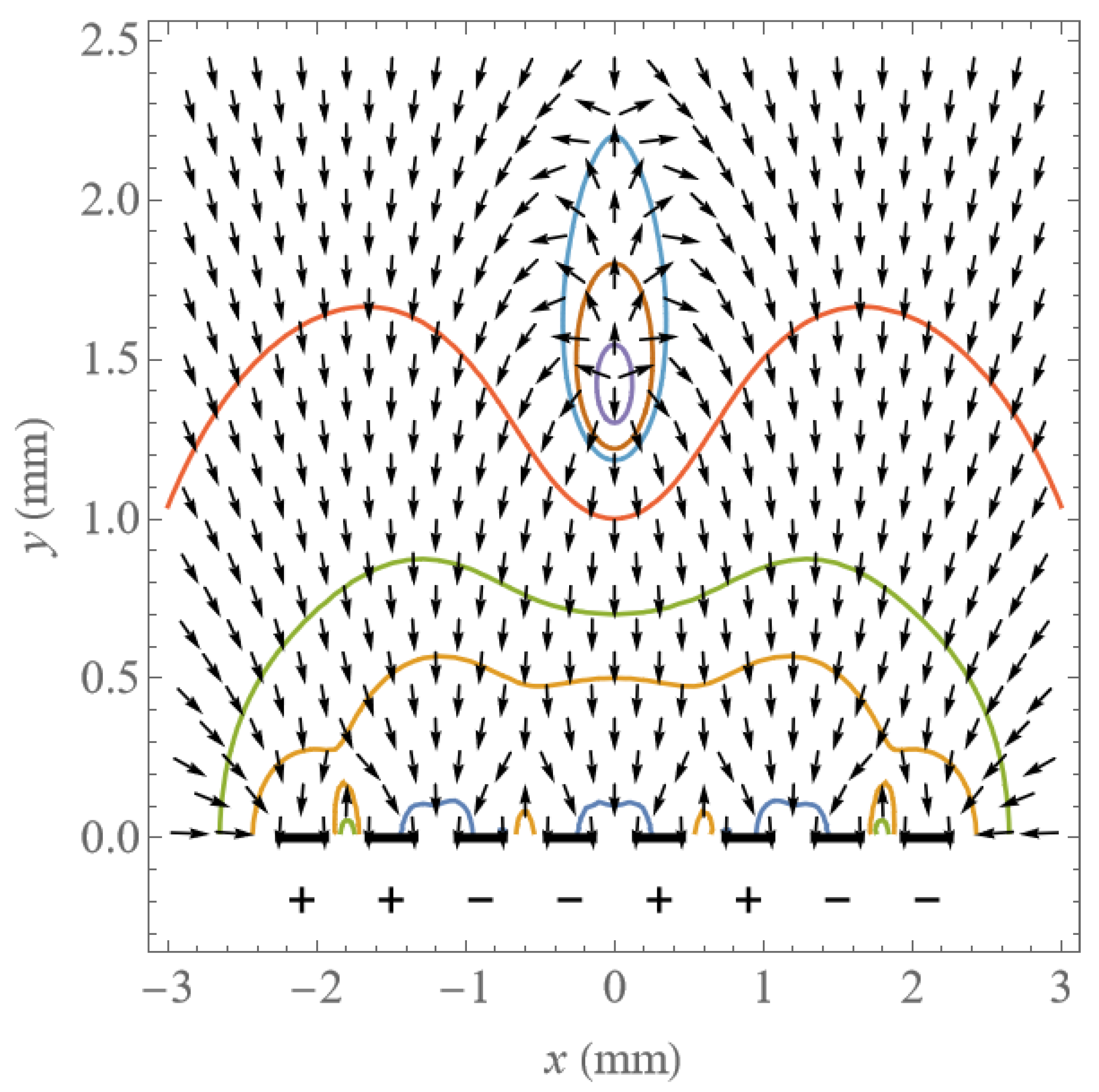
4.1. Distribution of Potential and Electric Field
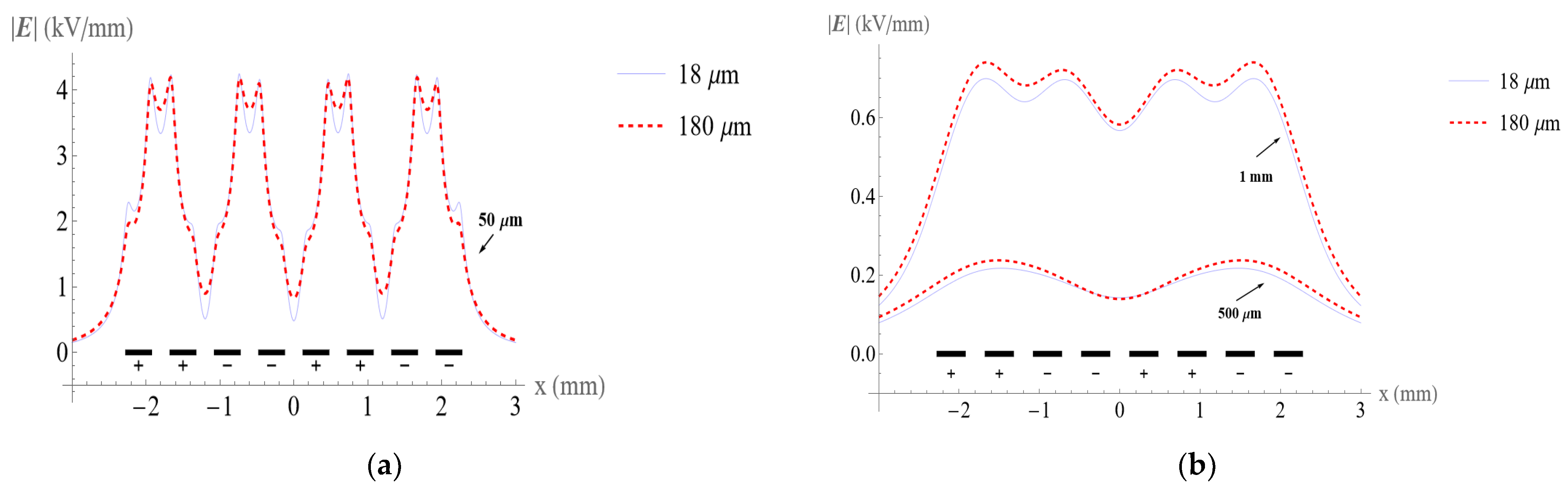
4.2. Electric Fields with Different Electrode Thickness
4.3. Dielectrophoretic Component Analysis
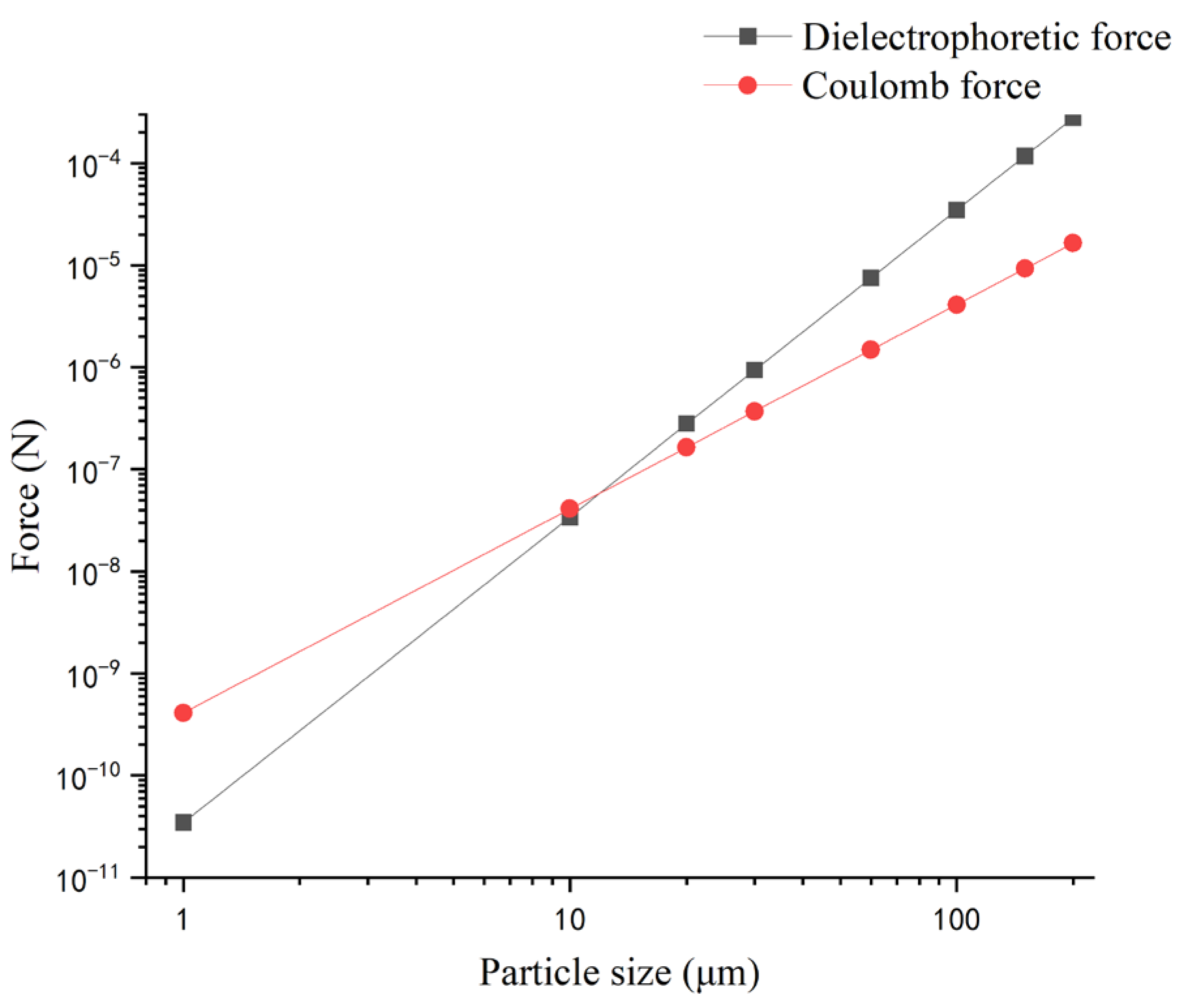
4.4. Real Case of Using Dielectrophoresis
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pohl, H.A. The motion and precipitation of suspensoids in divergent electric fields. J. Appl. Phys. 1951, 22, 869–871. [Google Scholar] [CrossRef]
- Pohl, H.A. Some effects of nonuniform fields on dielectrics. J. Appl. Phys. 1958, 29, 1182–1188. [Google Scholar] [CrossRef]
- Washizu, M.; Jones, T. Multipolar dielectrophoretic force calculation. J. Electrost. 1994, 33, 187–198. [Google Scholar] [CrossRef]
- Wang, X.-B.; Huang, Y.; Becker, F.; Gascoyne, P. A unified theory of dielectrophoresis and travelling wave dielectrophoresis. J. Phys. D Appl. Phys. 1994, 27, 1571. [Google Scholar] [CrossRef]
- Taniguchi, K.; Yamamoto, H.; Nakano, Y.; Sakai, T.; Morikuni, S.; Watanabe, S. A New Technique for Measuring the Distribution of Charge-to-Mass Ration for Toner Particles with On-Line Use. J. Imaging Sci. Technol. 2003, 47, 224–228. [Google Scholar] [CrossRef]
- Mazumder, M.; Sharma, R.; Biris, A.S.; Zhang, J.; Calle, C.; Zahn, M. Self-Cleaning Transparent Dust Shields for Protecting Solar Panels and Other Devices. Part. Sci. Technol. 2007, 25, 5–20. [Google Scholar] [CrossRef]
- Wang, X.-B.; Huang, Y.; Burt, J.P.H.; Markx, G.H.; Pethig, R. Selective dielectrophoretic confinement of bioparticles in potential energy wells. J. Phys. D Appl. Phys. 1993, 26, 1278–1285. [Google Scholar] [CrossRef]
- Kawamoto, H.; Kato, M.; Adachi, M. Electrostatic transport of regolith particles for sample return mission from asteroids. J. Electrost. 2016, 84, 42–47. [Google Scholar] [CrossRef]
- Gu, J.; Zhang, G.; Wang, Q.; Wang, C.; Liu, Y.; Yao, W.; Lyu, J. Experimental study on particles directed transport by an alternating travelling-wave electrostatic field. Powder Technol. 2022, 397, 117107. [Google Scholar] [CrossRef]
- Hewlin, R.L.; Edwards, M.; Schultz, C. Design and Development of a Traveling Wave Ferro-Microfluidic Device and System Rig for Potential Magnetophoretic Cell Separation and Sorting in a Water-Based Ferrofluid. Micromachines 2023, 14, 889. [Google Scholar] [CrossRef]
- Kawamoto, H.; Seki, K.; Kuromiya, N. Mechanism of travelling-wave transport of particles. J. Phys. D Appl. Phys. 2006, 39, 1249–1256. [Google Scholar] [CrossRef]
- Zouaghi, A.; Zouzou, N.; Dascalescu, L. Assessment of forces acting on fine particles on a traveling-wave electric field conveyor: Application to powder manipulation. Powder Technol. 2019, 343, 375–382. [Google Scholar] [CrossRef]
- Sayyah, A.; Eriksen, R.S.; Horenstein, M.N.; Mazumder, M.K. Performance Analysis of Electrodynamic Screens Based on Residual Particle Size Distribution. IEEE J. Photovolt. 2017, 7, 221–229. [Google Scholar] [CrossRef]
- Liu, G.Q.; Marshall, J.S. Effect of particle adhesion and interactions on motion by traveling waves on an electric curtain. J. Electrost. 2010, 68, 179–189. [Google Scholar] [CrossRef]
- Johnson, C.E.; Srirama, P.K.; Sharma, R.; Pruessner, K.; Zhang, J.; Mazumder, M.K. Effect of particle size distribution on the performance of electrodynamic screens. In Proceedings of the 40th IAS Annual Meeting, Hong Kong, China, 2–6 October 2005; pp. 341–345. [Google Scholar]
- Wang, X.; Wang, X.; Becker, F.F.; Gascoyne, P.R.C. A theoretical method of electrical field analysis for dielectrophoretic electrode arrays using Green’s theorem. J. Phys. D Appl. Phys. 1996, 29, 1649–1660. [Google Scholar] [CrossRef]
- Green, N.G.; Ramos, A.; Morgan, H. Numerical solution of the dielectrophoretic and travelling wave forces for interdigitated electrode arrays using the finite element method. J. Electrost. 2002, 56, 235–254. [Google Scholar] [CrossRef] [Green Version]
- Morgan, H.; Izquierdo, A.G.; Bakewell, D.; Green, N.G.; Ramos, A. The dielectrophoretic and travelling wave forces generated by interdigitated electrode arrays: Analytical solution using Fourier series. J. Phys. D Appl. Phys. 2001, 34, 1553–1561. [Google Scholar] [CrossRef] [Green Version]
- Sun, T.; Morgan, H.; Green, N.G. Analytical solutions of ac electrokinetics in interdigitated electrode arrays: Electric field, dielectrophoretic and traveling-wave dielectrophoretic forces. Phys. Rev. E Cover. Stat. Nonlinear Biol. Soft Matter Phys. 2007, 76, 046610. [Google Scholar] [CrossRef] [Green Version]
- Gauthier, V.; Bolopion, A.; Gauthier, M. Analytical Formulation of the Electric Field Induced by Electrode Arrays: Towards Automated Dielectrophoretic Cell Sorting. Micromachines 2017, 8, 253. [Google Scholar] [CrossRef] [Green Version]
- Chappell, D.J. Boundary integral solution of potential problems arising in the modelling of electrified oil films. J. Integral Equ. Appl. 2015, 27, 407–430. [Google Scholar] [CrossRef] [Green Version]
- Singer, H.; Steinbigler, H.; Weiss, P. A charge simulation method for the calculation of high voltage fields. IEEE Trans. Power Appar. Syst. 1974, 5, 1660–1668. [Google Scholar] [CrossRef] [Green Version]
- Masuda, S.; Kamimura, T. Approximate methods for calculating a non-uniform travelling. J. Electrost. 1975, 1, 351–370. [Google Scholar] [CrossRef]
- Trefftz, E. Ein Gegensttick zum Ritzschen Verfahren. In Proceedings of the 2nd International Congress on Applied Mechanics, Zürich, Switzerland, 12–17 September 1926; pp. 131–137. [Google Scholar]
- Kołodziej, J.A.; Grabski, J.K. Many names of the Trefftz method. Eng. Anal. Bound. Elem. 2018, 96, 169–178. [Google Scholar] [CrossRef]
- Yializis, A.; Kuffel, E.; Alexander, P. An Optimized Charge Simulation Method for the Calculation of High Voltage Fields. IEEE Trans. Power Appar. Syst. 1978, PAS-97, 2434–2440. [Google Scholar] [CrossRef]
- Kawamoto, H.; Shirai, K. Electrostatic Transport of Lunar Soil for In Situ Resource Utilization. J. Aerosp. Eng. 2012, 25, 132–138. [Google Scholar] [CrossRef]
- Riley, K.F.; Hobson, M.P.; Bence, S.J. Mathematical Methods for Physics and Engineering; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Fichtenholz, G. Calculus Tutorial; Highe Education Press: Beijing, China, 2006; Volume 1. [Google Scholar]
- Luo, Y.; Theodoulidis, T.; Zhou, X.; Kyrgiazoglou, A. Calculation of AC resistance of single-layer coils using boundary-element method. IET Electr. Power Appl. 2020, 15, 1–12. [Google Scholar] [CrossRef]
- Sayyah, A.; Horenstein, M.N.; Mazumder, M.K.; Ahmadi, G. Electrostatic force distribution on an electrodynamic screen. J. Electrost. 2016, 81, 24–36. [Google Scholar] [CrossRef] [Green Version]
- Zouaghi, A.; Zouzou, N. Numerical modeling of particle motion in traveling wave solar panels cleaning device. J. Electrost. 2021, 110, 103552. [Google Scholar] [CrossRef]
- Sayyah, A.; Horenstein, M.N.; Mazumder, M.K. A comprehensive analysis of the electric field distribution in an electrodynamic screen. J. Electrost. 2015, 76, 115–126. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, N.-V.; Manh, T.L.; Nguyen, T.S.; Le, V.T.; Hieu, N.V. Applied electric field analysis and numerical investigations of the continuous cell separation in a dielectrophoresis-based microfluidic channel. J. Sci. Adv. Mater. Devices 2021, 6, 11–18. [Google Scholar] [CrossRef]
- Krupke, R.; Hennrich, F.; Löhneysen, H.V.; Kappes, M. Separation of Metallic from Semiconducting Single-Walled Carbon Nanotubes. Science 2003, 301, 344–347. [Google Scholar] [CrossRef] [Green Version]
- Pauthenier, M.; Moreau-Hanot, M. La charge des particules sphériques dans un champ ionisé. J. De Phys. Radium 1932, 3, 590–613. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Calculating parameters | k1 = 1/6 k2 = 1/6 | n1 = 200 n2 = 10 | n1 = 150 n2 = 10 | n1 = 100 n2 = 10 | n1 = 100 n2 = 15 | n1 = 100 n2 = 20 |
| Standard norm error | Phase 1 | 0.03% | 0.04% | 0.07% | 0.08% | 0.12% |
| Phase 2 | 0.02% | 0.03% | 0.05% | 0.03% | 0.09% | |
| Time | 11.6 s | 7.6 s | 3.9 s | 4.1 s | 4.5 s | |
| Calculating parameters | n1 = 200 n2 = 10 | k1 = 1/6 k2 = 1/6 | k1 = 1/5 k2 = 1/5 | k1 = 1/3 k2 = 1/3 | k1 = 1/2 k2 = 1/2 | k1 = 1/3 k2 = 1/6 |
| Standard norm error | Phase 1 | 0.03% | 0.03% | 0.04% | 0.06% | 0.06% |
| Phase 2 | 0.02% | 0.02% | 0.03% | 0.05% | 0.04% | |
| Time: | 12.0 s | 12.1 s | 12.3 s | 12.1 s | 12.1 s |
| Calculating parameters | n1 = 200 n2 = 10 | n1 = 150 n2 = 10 | n1 = 100 n2 = 10 | n1 = 100 n2 = 15 | n1 = 100 n2 = 20 | |
| Accumulated error | Phase 1 | 0.13% | 0.16% | 0.19% | 0.19% | 0.18% |
| Phase 2 | 0.10% | 0.12% | 0.15% | 0.14% | 0.13% | |
| Time | 12.0 s | 8.1 s | 4.9 s | 5.3 s | 5.4 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Luo, Y.; Cilliers, J.; Hadler, K.; Starr, S.; Wang, Y. Numerical Solution of the Electric Field and Dielectrophoresis Force of Electrostatic Traveling Wave System. Micromachines 2023, 14, 1347. https://doi.org/10.3390/mi14071347
Yu Y, Luo Y, Cilliers J, Hadler K, Starr S, Wang Y. Numerical Solution of the Electric Field and Dielectrophoresis Force of Electrostatic Traveling Wave System. Micromachines. 2023; 14(7):1347. https://doi.org/10.3390/mi14071347
Chicago/Turabian StyleYu, Yue, Yao Luo, Jan Cilliers, Kathryn Hadler, Stanley Starr, and Yanghua Wang. 2023. "Numerical Solution of the Electric Field and Dielectrophoresis Force of Electrostatic Traveling Wave System" Micromachines 14, no. 7: 1347. https://doi.org/10.3390/mi14071347