
Saturation-Induced Phase Error Compensation Method Using Complementary Phase


Abstract
:1. Introduction
2. Methods
2.1. N-Step Phase-Shifting Algorithm
2.2. Saturation-Induced Phase Error Analysis
2.3. Phase Error Compensation Using a Complementary Phase
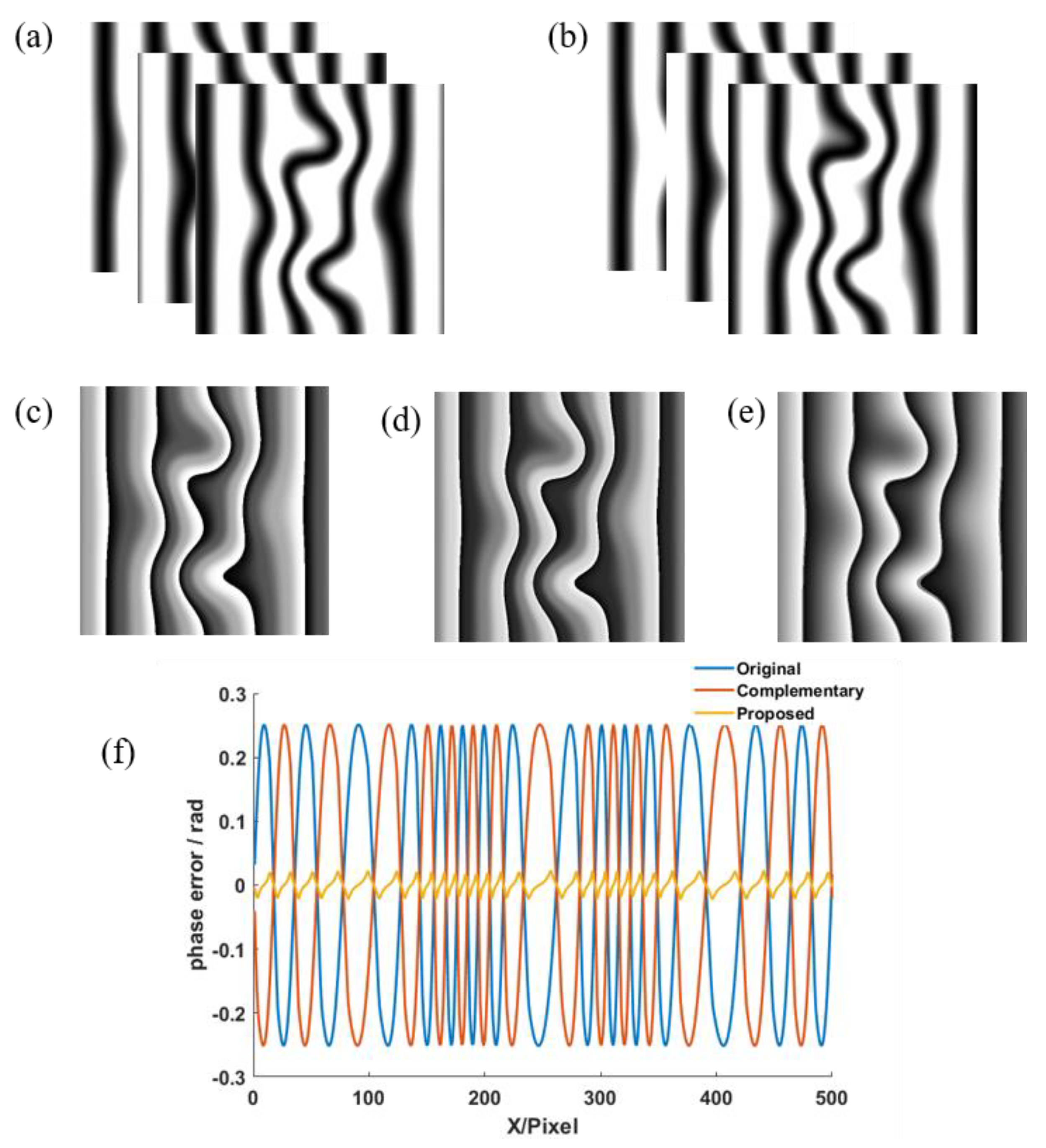
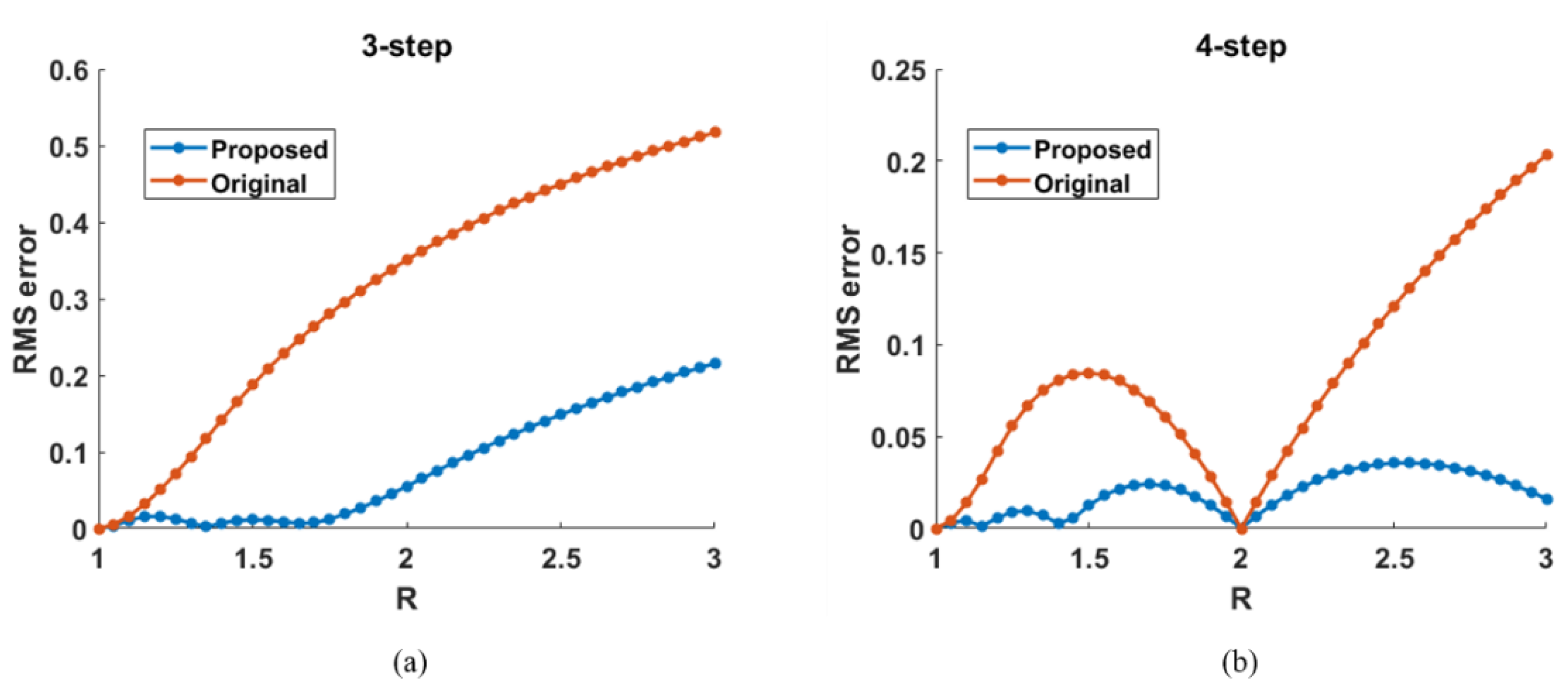
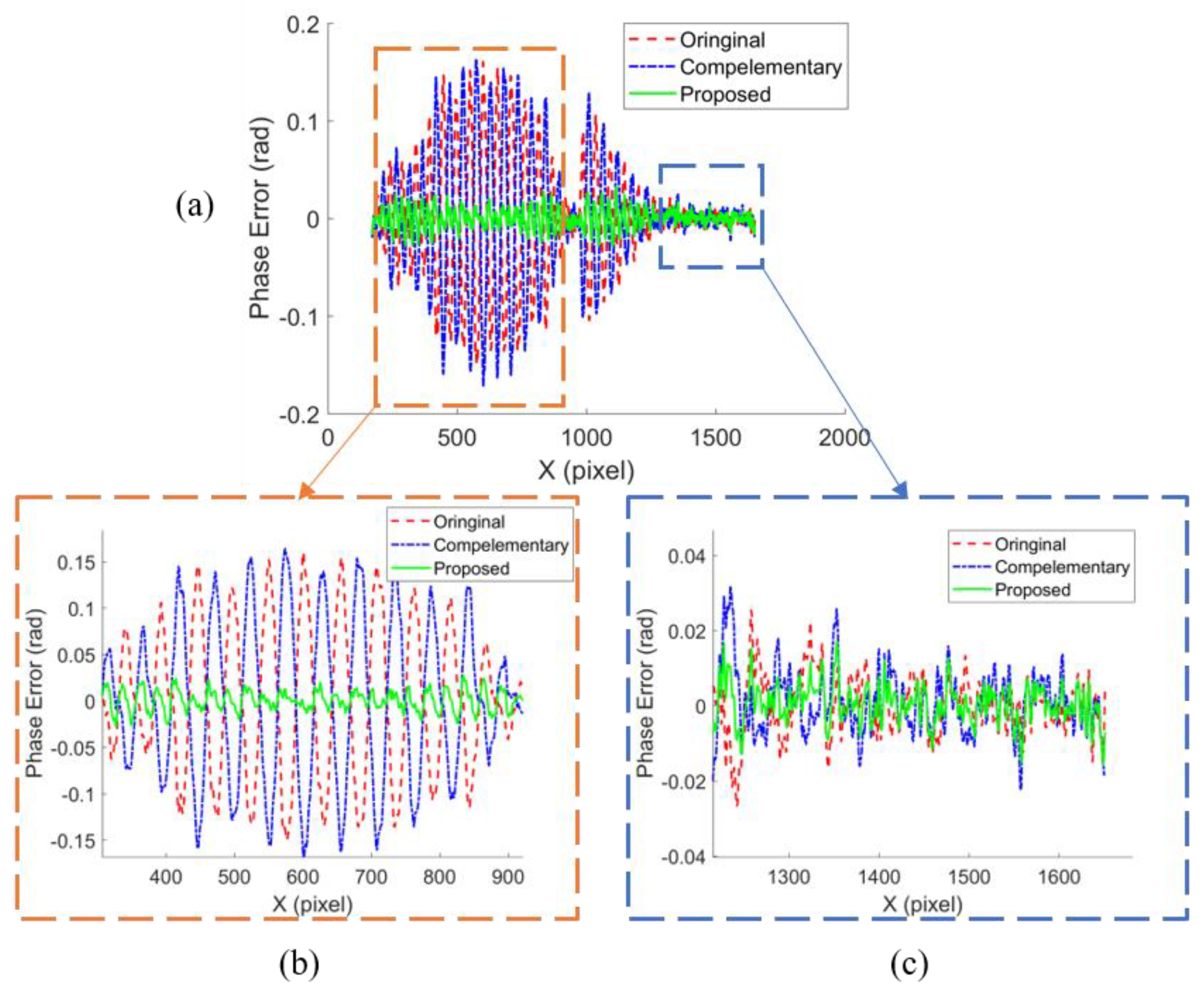
3. Simulations
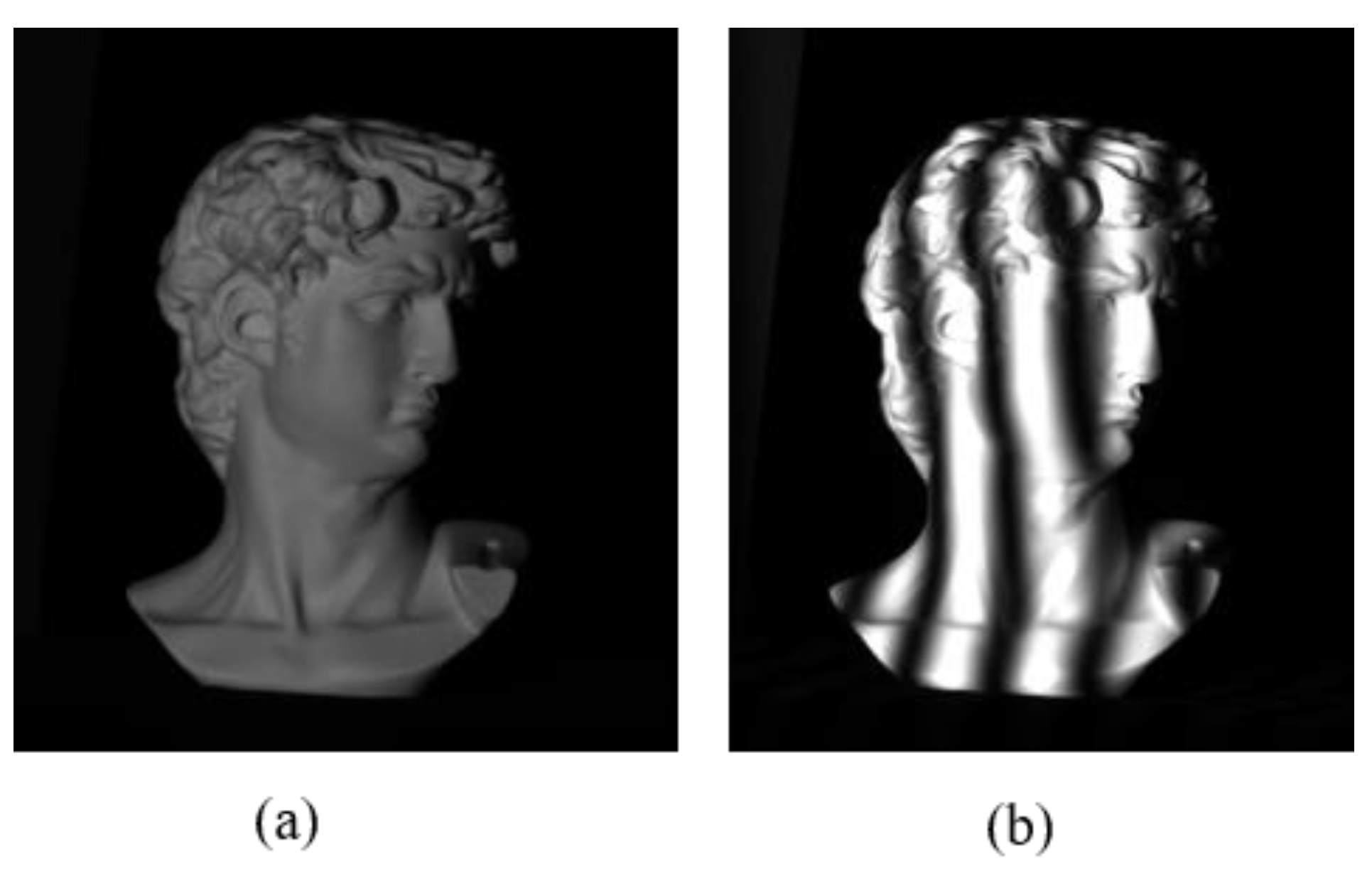
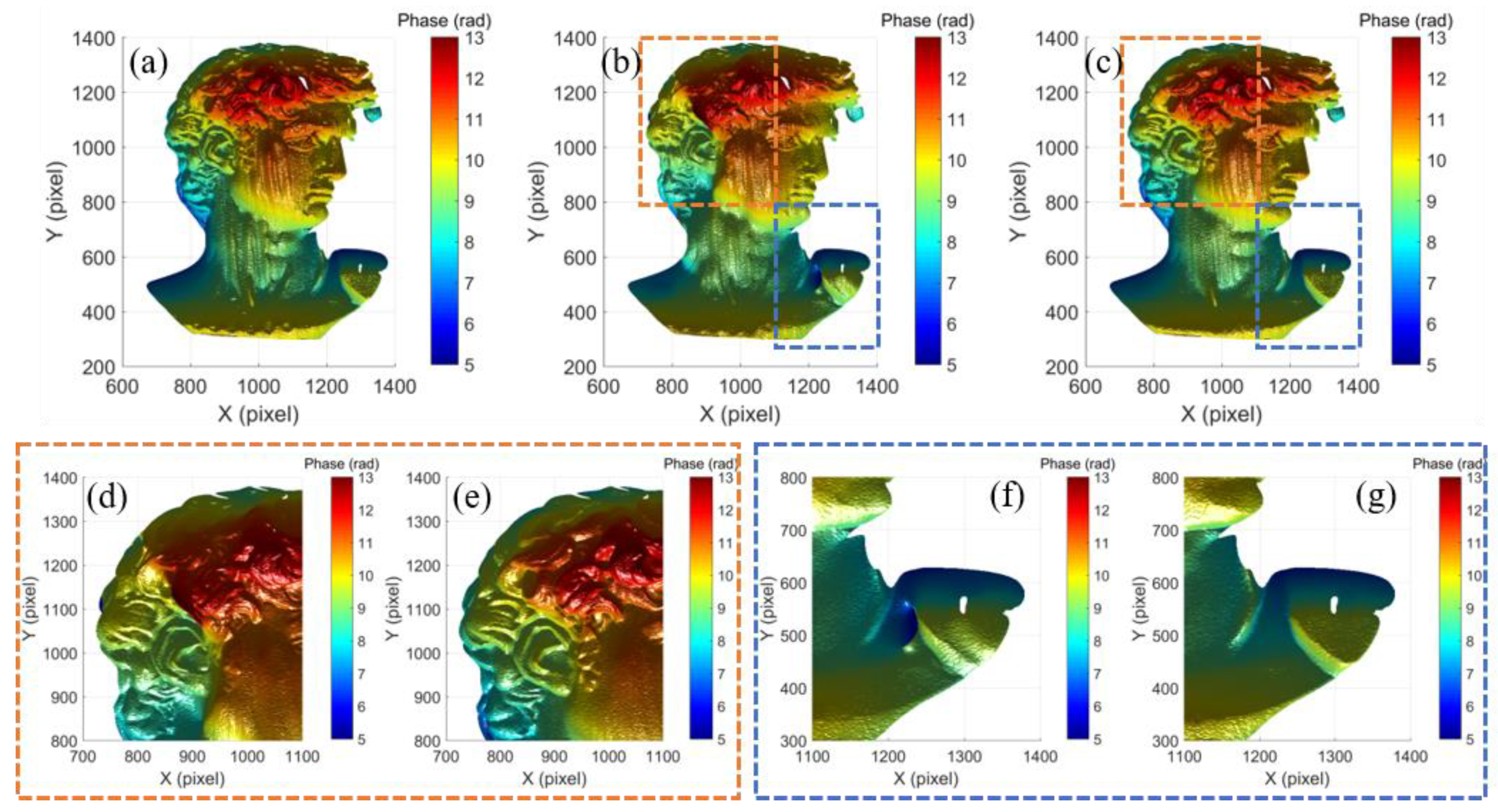
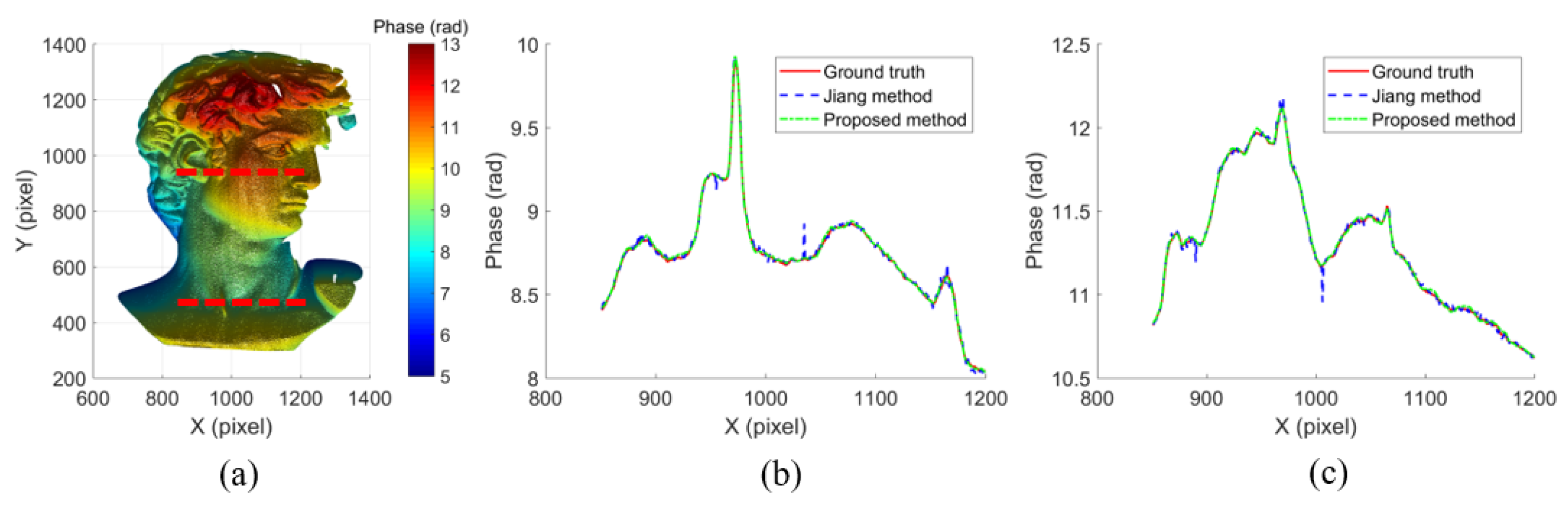
4. Experiments and Results
4.1. Effectiveness Evaluation Measurement
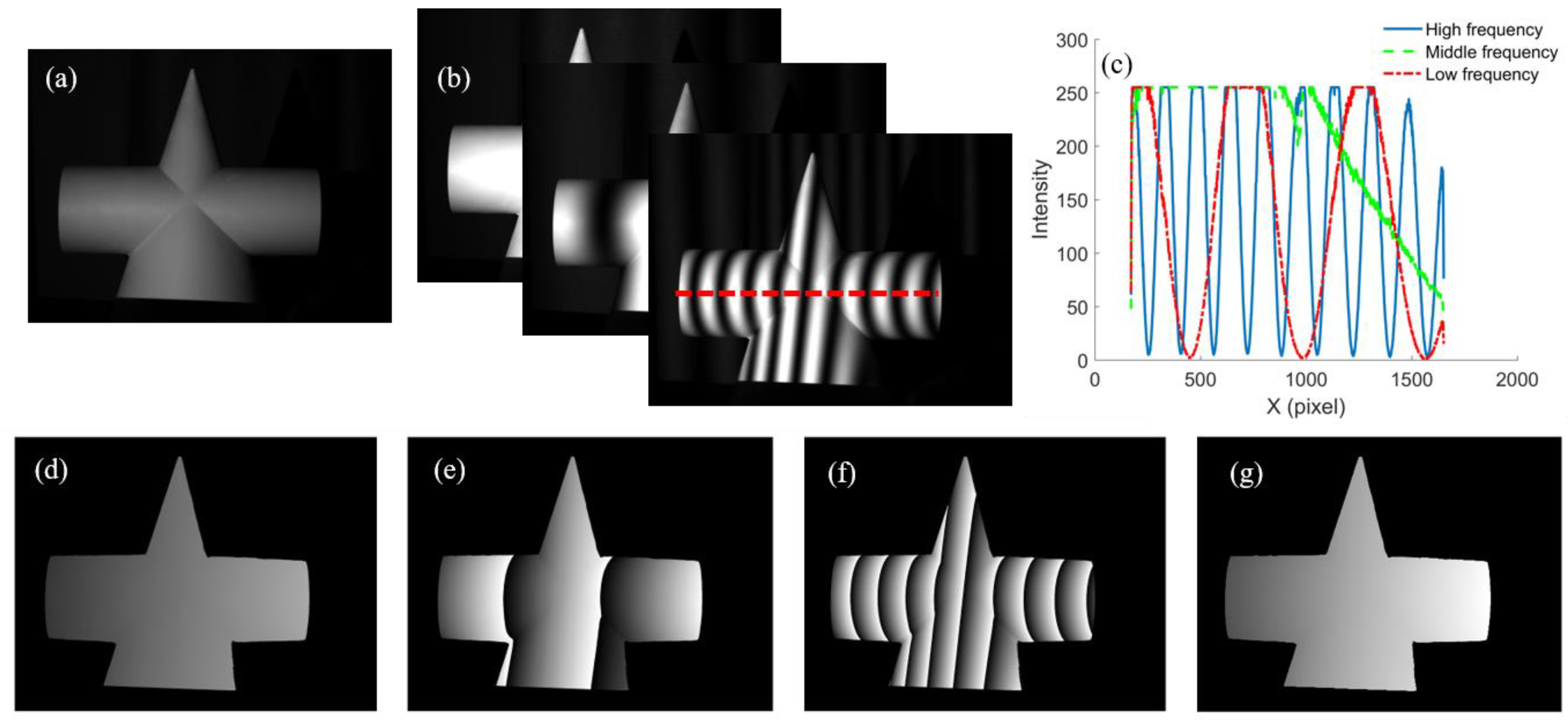
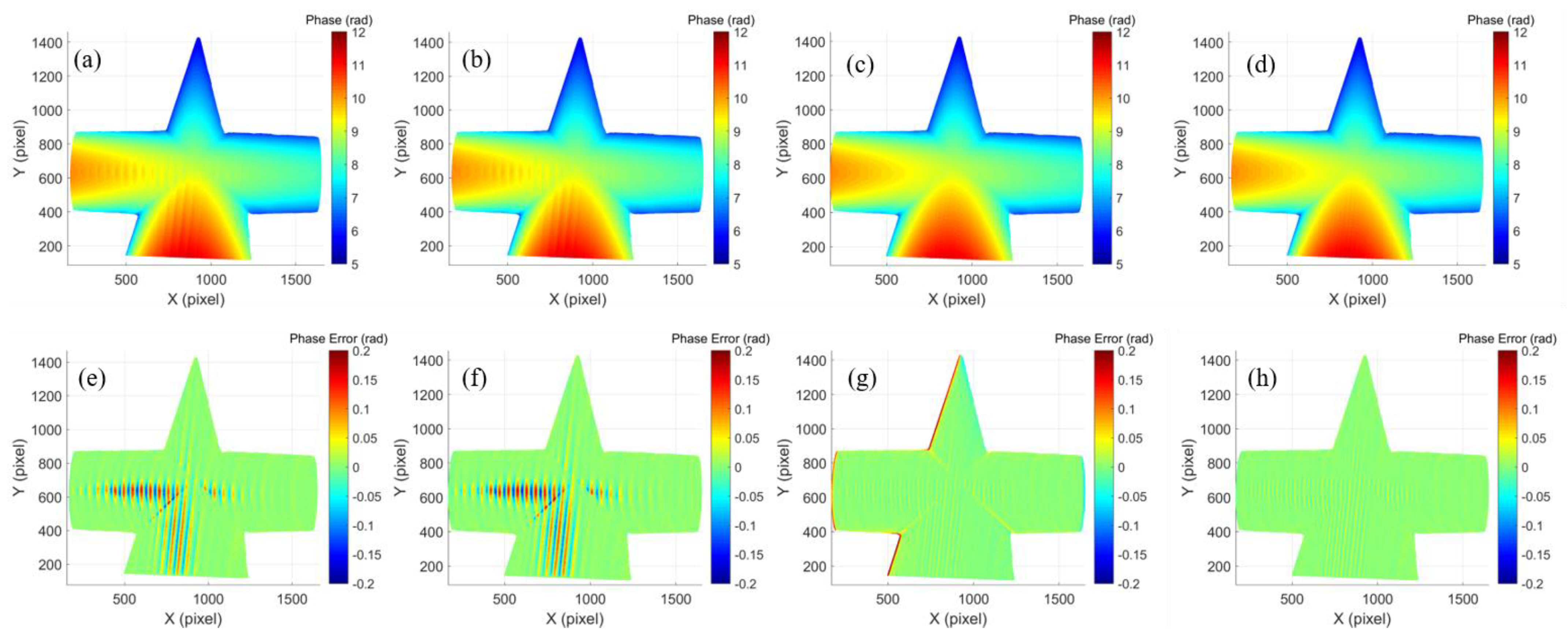
4.2. Comparison Measurement of Complex Surface
4.3. Measurements for an HDR Scenario
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, R.; Xu, J.; Zhang, S. Comparative study on 3D optical sensors for short range applications. Opt. Laser Eng. 2022, 149, 106763. [Google Scholar] [CrossRef]
- Li, Y.; Li, N.; Wang, D.; Chu, F.; Lee, S.; Zheng, Y.; Wang, Q. Tunable liquid crystal grating based holographic 3D display system with wide viewing angle and large size. Light Sci. Appl. 2022, 11, 188. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Liu, C.; Shen, C.; Xing, Y.; Wang, Q. Holographic capture and projection system of real object based on tunable zoom lens. PhotoniX 2020, 1, 6. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Suresh, V.; Zheng, Y.; Wang, Y.; Xi, J.; Li, B. Motion induced error reduction methods for phase shifting profilometry: A review. Opt. Laser Eng. 2021, 141, 106573. [Google Scholar] [CrossRef]
- Gorthi, S.S.; Rastogi, P. Fringe projection techniques: Whither we are? Opt. Lasers Eng. 2010, 48, 133–140. [Google Scholar] [CrossRef] [Green Version]
- Zuo, C.; Feng, S.; Huang, L.; Tao, T.; Yin, W.; Chen, Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt. Lasers Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, S. Status, challenges, and future perspectives of fringe projection profilometry. Opt. Laser Eng. 2020, 135, 106193. [Google Scholar] [CrossRef]
- Geng, J. Structured-light 3D surface imaging: A tutorial. Adv. Opt. Photonics 2011, 3, 128–160. [Google Scholar] [CrossRef]
- Wan, Y.; Cao, Y.; Kofman, J. High-accuracy 3d surface measurement using hybrid multi-frequency composite-pattern temporal phase unwrapping. Opt. Express 2020, 28, 39165. [Google Scholar] [CrossRef] [PubMed]
- Wan, Y.; Cao, Y.; Liu, X.; Tao, T.; Kofman, J. High-frequency color-encoded fringe-projection profilometry based on geometry constraint for large depth range. Opt. Express 2020, 28, 13043–13058. [Google Scholar] [CrossRef] [PubMed]
- An, H.; Cao, Y.; Wu, H. The spatial phase-shifting measuring profilometry based on dual-frequency grating. Opt. Lasers Eng. 2021, 143, 106638. [Google Scholar] [CrossRef]
- Feng, S.; Zhang, L.; Zuo, C.; Tao, T.; Chen, Q.; Gu, G. High dynamic range 3d measurements with fringe projection profilometry: A review. Meas. Sci. Technol. 2018, 29, 122001. [Google Scholar] [CrossRef]
- Qi, Z.; Wang, Z.; Huang, J.; Xue, Q.; Gao, J. Improving the quality of stripes in structured-light three-dimensional profile measurement. Opt. Eng. 2016, 56, 031208. [Google Scholar] [CrossRef]
- Zhang, S. Rapid and automatic optimal exposure control for digital fringe projection technique. Opt. Lasers Eng. 2020, 128, 106029. [Google Scholar] [CrossRef]
- Li, D.; Kofman, J. Adaptive fringe-pattern projection for image saturation avoidance in 3D surface-shape measurement. Opt. Express 2014, 22, 9887–9901. [Google Scholar] [CrossRef] [PubMed]
- Zhou, P.; Cheng, Y.; Zhu, J. High-dynamic-range 3D shape measurement with adaptive speckle projection through segmentation-based mapping. IEEE Trans. Instrum. Meas. 2022, 72, 5003512. [Google Scholar]
- Cai, Z.; Liu, X.; Peng, X.; Yin, Y.; Li, A.; Wu, J.; Gao, B. Structured light field 3D imaging. Opt. Express 2016, 24, 20324–20334. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, J.; Luo, B. High dynamic range 3D measurement based on spectral modulation and hyperspectral imaging. Opt. Express 2018, 26, 34442–34450. [Google Scholar] [CrossRef]
- Wu, K.; Tan, J.; Xia, H.; Liu, C. An exposure fusion-based structured light approach for the 3D measurement of a specular Surface. IEEE Sens. J. 2021, 21, 6314–6324. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, Q.; Feng, S. Real-time high dynamic range 3D measurement using fringe projection. Opt. Express 2020, 28, 24363–24378. [Google Scholar] [CrossRef]
- Liu, Y.; Fu, Y.; Zhuan, Y. High dynamic range real-time 3D measurement based on Fourier transform profilometry. Opt. Laser Technol. 2021, 138, 106833. [Google Scholar] [CrossRef]
- Zhu, Z.; You, D.; Zhou, F. Rapid 3D reconstruction method based on the polarization-enhanced fringe pattern of an HDR object. Opt. Express 2021, 49, 2162–2171. [Google Scholar] [CrossRef]
- Guan, X.; Qu, X.; Zhang, F. Pixel-level mapping method in high dynamic range imaging system based on DMD modulation. Opt. Commun. 2021, 499, 127278. [Google Scholar] [CrossRef]
- Cao, J.; Li, C.; Zhang, X. High-reflectivity surface measurement in structured-light technique by using a transparent screen. Measurement 2022, 196, 111273. [Google Scholar] [CrossRef]
- Zhu, Z.; Dong, Y.; You, D.; Sun, X. Accurate three-dimensional measurement based on polarization-defocused encoded structured light. Measurement 2022, 205, 112128. [Google Scholar] [CrossRef]
- Zhu, Z.; Li, M.; Zhou, F.; You, D. Stable 3D measurement method for high dynamic range surfaces based on fringe projection profilometry. Opt. Lasers Eng. 2023, 166, 107542. [Google Scholar] [CrossRef]
- Hu, E.; He, Y.; Chen, Y. Study on a novel phase-recovering algorithm for partial intensity saturation in digital projection grating phase-shifting profilometry. Opt. Int. J. Light Electron Opt. 2010, 121, 23–28. [Google Scholar] [CrossRef]
- Chen, B.; Zhang, S. High-quality 3D shape measurement using saturated fringe patterns. Opt. Lasers Eng. 2016, 87, 83–89. [Google Scholar] [CrossRef] [Green Version]
- Qi, Z.; Wang, Z.; Huang, J.; Xing, C.; Gao, J. Error of image saturation in the structured-light method. Appl. Opt. 2018, 57, A181–A188. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Bell, T.; Zhang, S. High dynamic range real-time 3D shape measurement. Opt. Express 2016, 24, 7337–7346. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Yang, Y.; Xu, P.; Liu, J. Saturation-induced phase error correction method in 3-D measurement based on inverted fringes. Appl. Opt. 2023, 62, 492–499. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.; Su, W.; He, Z.; Bai, Y.; Dong, B.; Xie, S. Generic saturation-induced phase error correction for structured light 3D shape measurement. Opt. Lett. 2022, 47, 3387–3390. [Google Scholar] [CrossRef]
- Li, Z.; Shi, Y.; Wang, C.; Wang, Y. Accurate calibration method for a structured light system. Opt. Eng. 2008, 47, 053604. [Google Scholar] [CrossRef]
- Zuo, C.; Huang, L.; Zhang, M.; Chen, Q.; Asundi, A. Temporal phase unwrapping algorithms for fringe projection profilometry: A comparative review. Opt. Lasers Eng. 2016, 85, 84–103. [Google Scholar] [CrossRef]
- Chen, C.; Wan, Y.; Cao, Y. Instability of projection light source and real-time phase error correction method for phase-shifting profilometry. Opt. Express 2018, 26, 4258–4270. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method Using Original Fringe Patterns | Method Using π/N Fringe Patterns | Method with Fourier Filtering | Proposed Method without Fourier Filtering | |
|---|---|---|---|---|
| MAE | 0.1879 | 0.2169 | 0.4160 | 0.0702 |
| RMS | 0.0254 | 0.0276 | 0.0175 | 0.0083 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, Y.; Cao, Y.; Xu, M.; Tang, T. Saturation-Induced Phase Error Compensation Method Using Complementary Phase. Micromachines 2023, 14, 1258. https://doi.org/10.3390/mi14061258
Wan Y, Cao Y, Xu M, Tang T. Saturation-Induced Phase Error Compensation Method Using Complementary Phase. Micromachines. 2023; 14(6):1258. https://doi.org/10.3390/mi14061258
Chicago/Turabian StyleWan, Yingying, Yiping Cao, Min Xu, and Tao Tang. 2023. "Saturation-Induced Phase Error Compensation Method Using Complementary Phase" Micromachines 14, no. 6: 1258. https://doi.org/10.3390/mi14061258