
Development of a Novel Piezoelectric Actuator Based on Stick–Slip Principle by Using Asymmetric Constraint
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
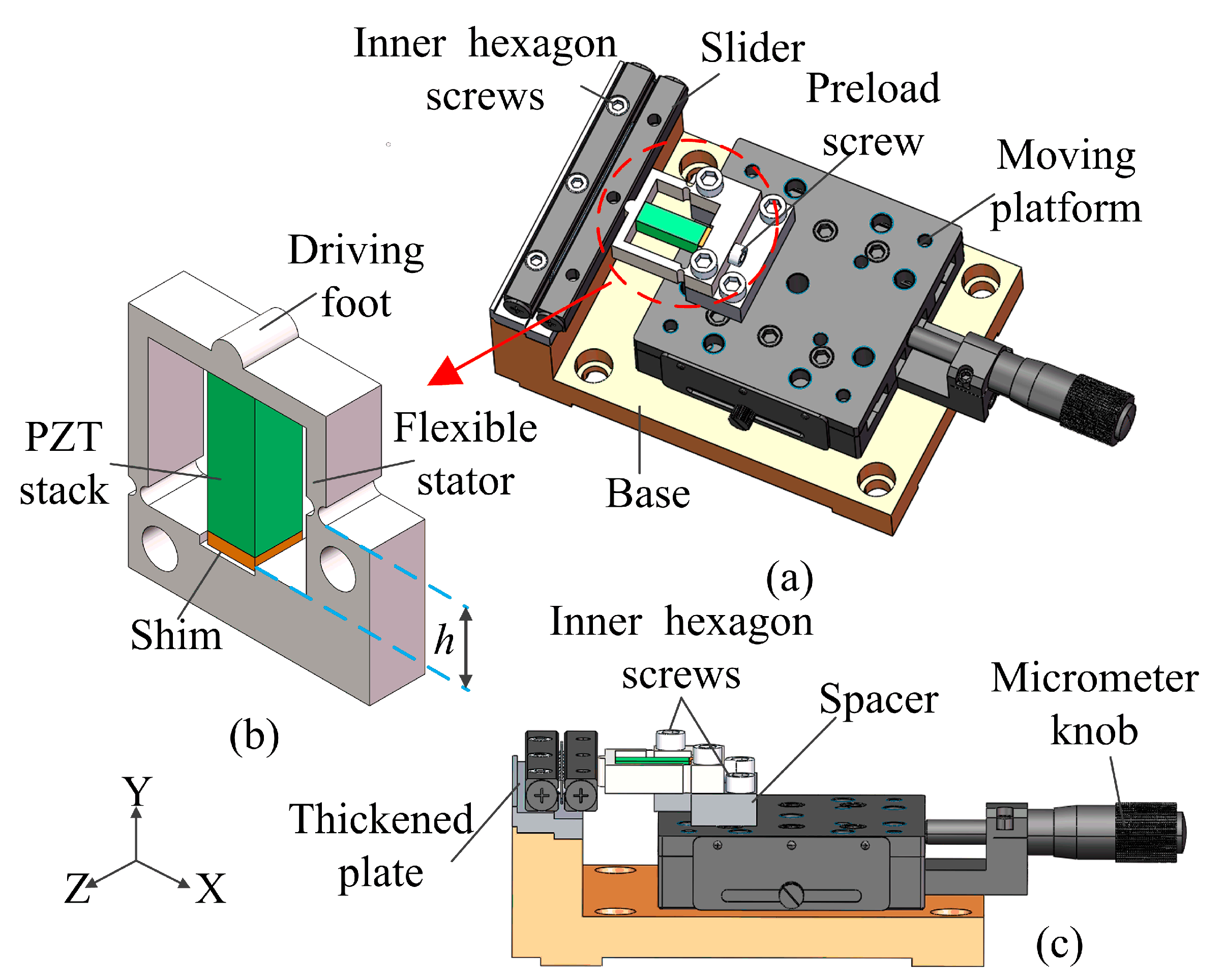
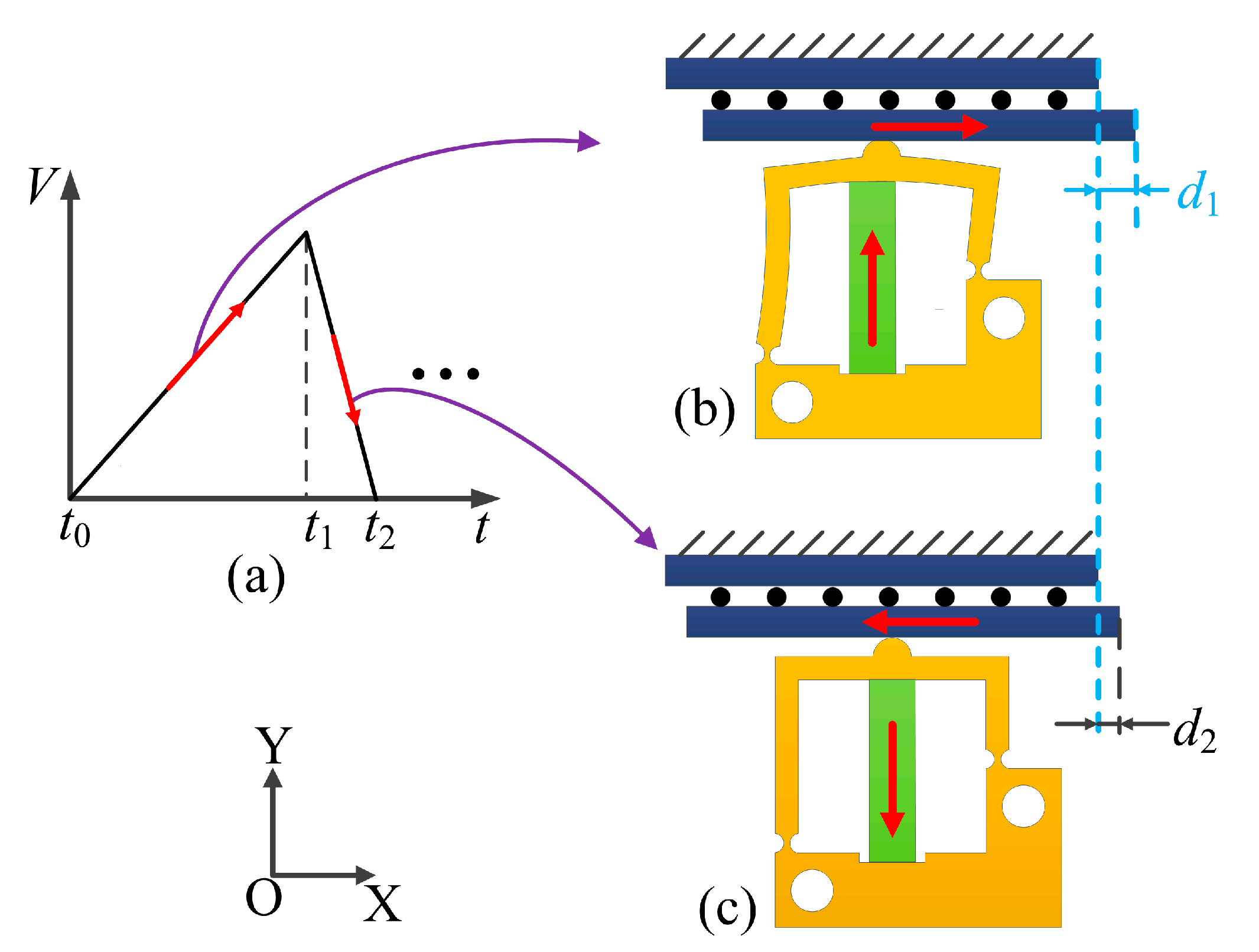
2. Structure and Principle
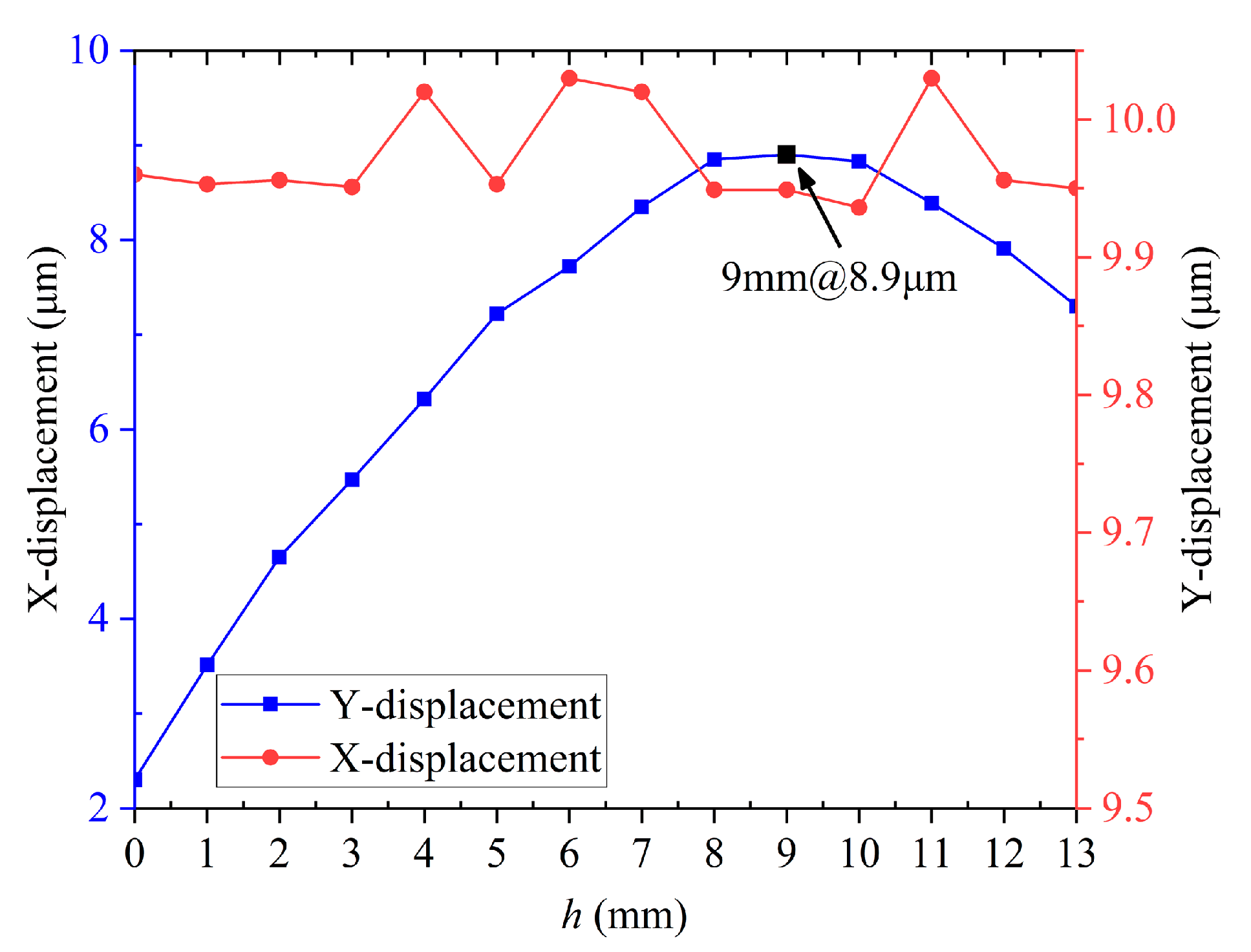
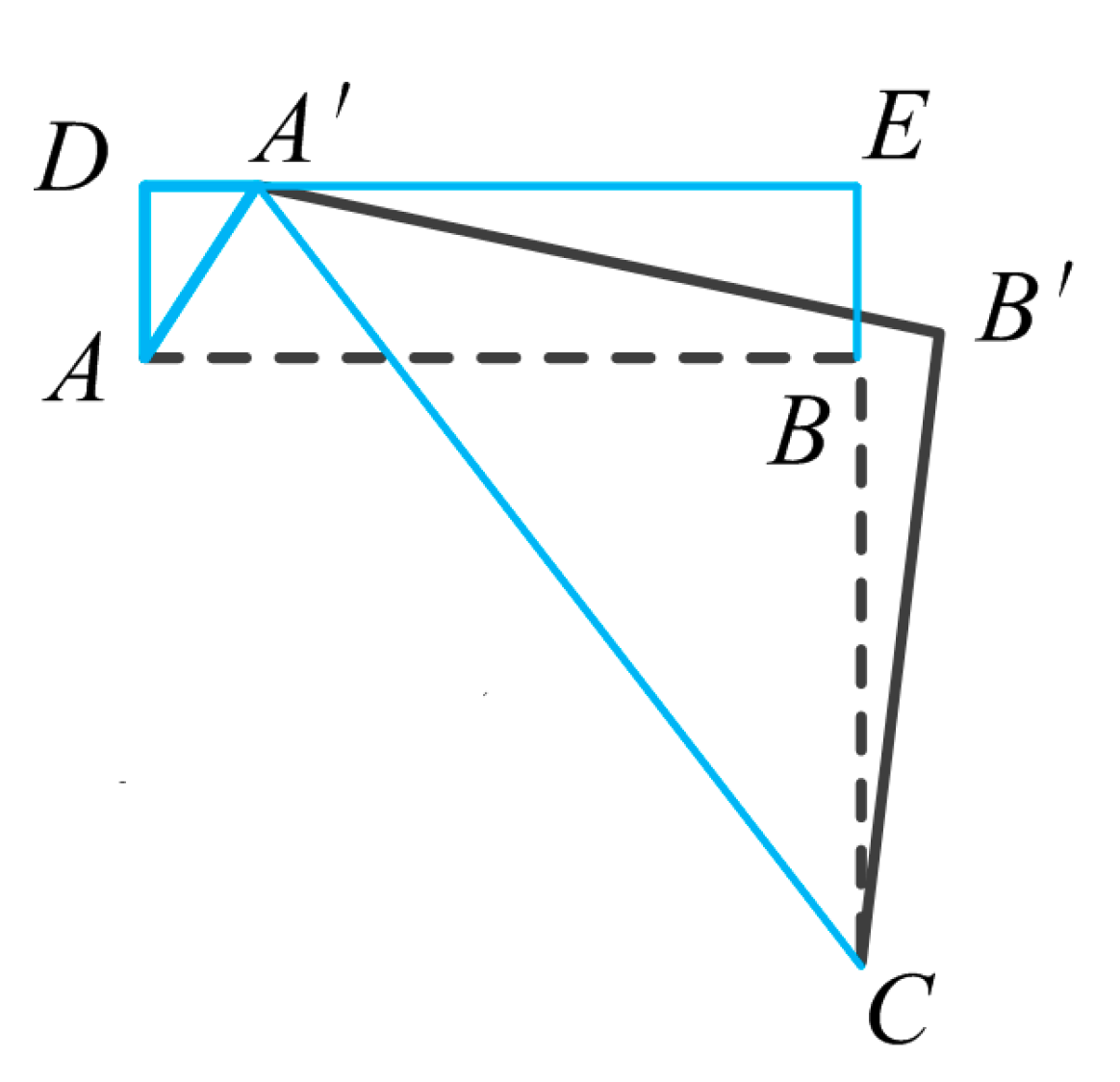
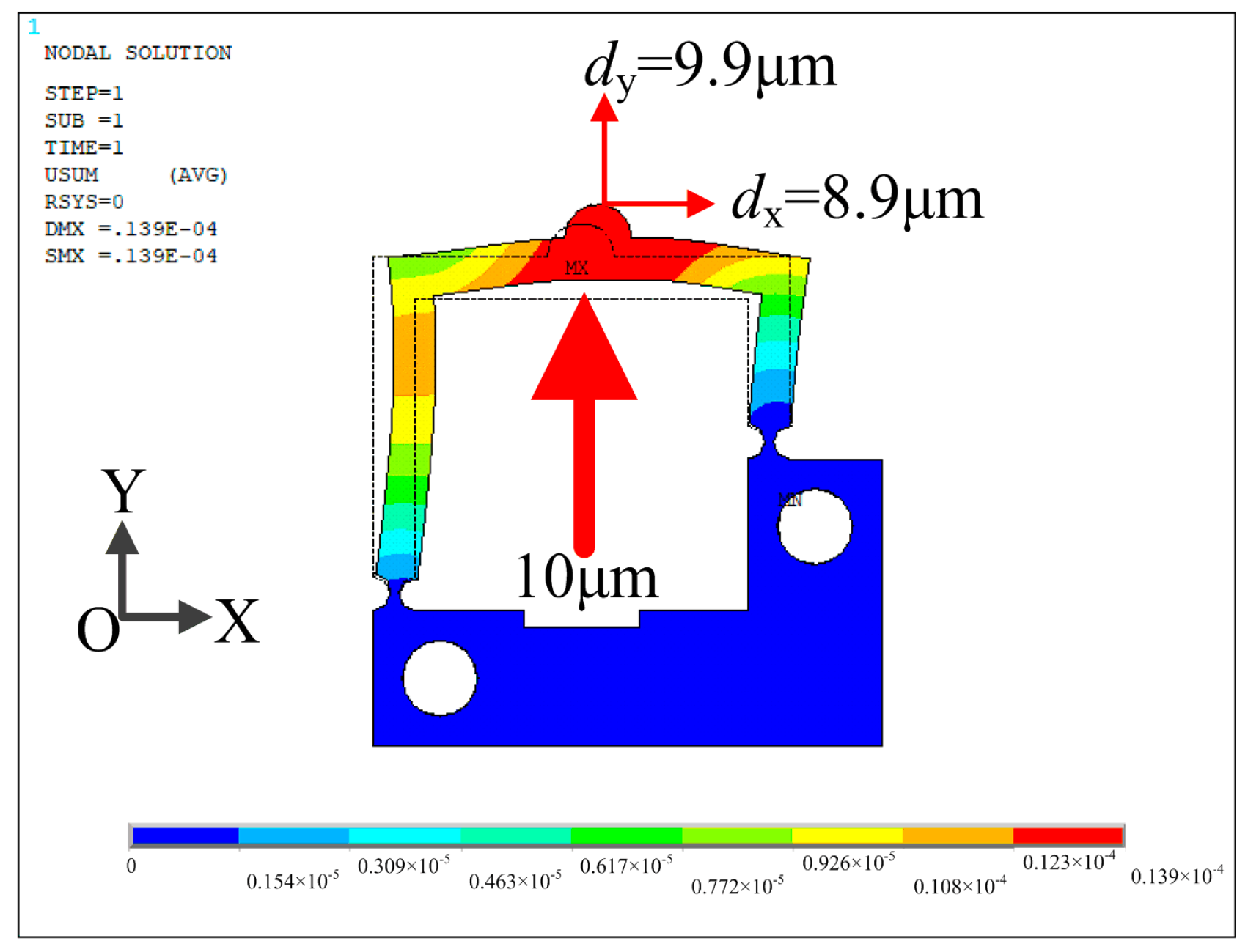
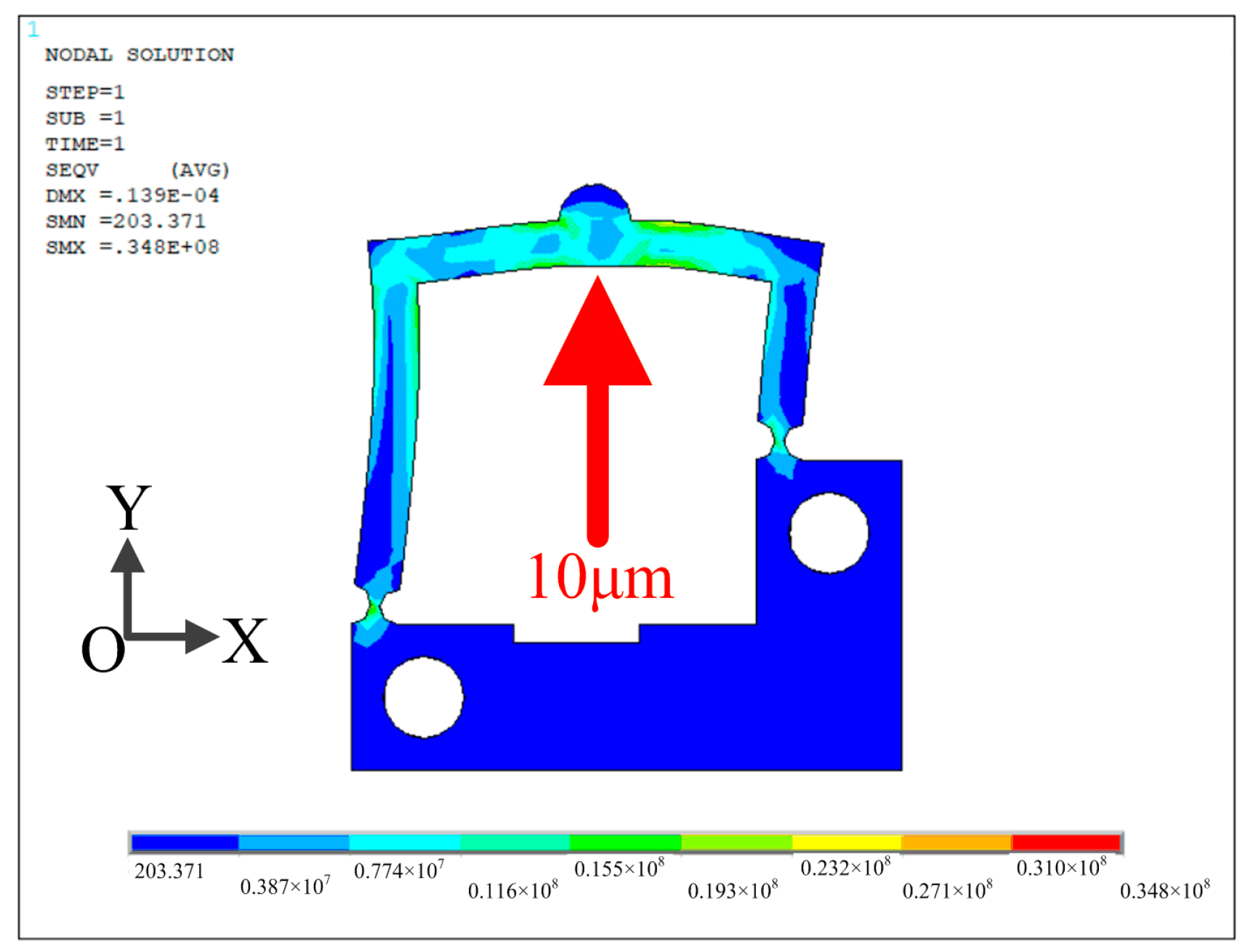
3. Simulations and Analyses
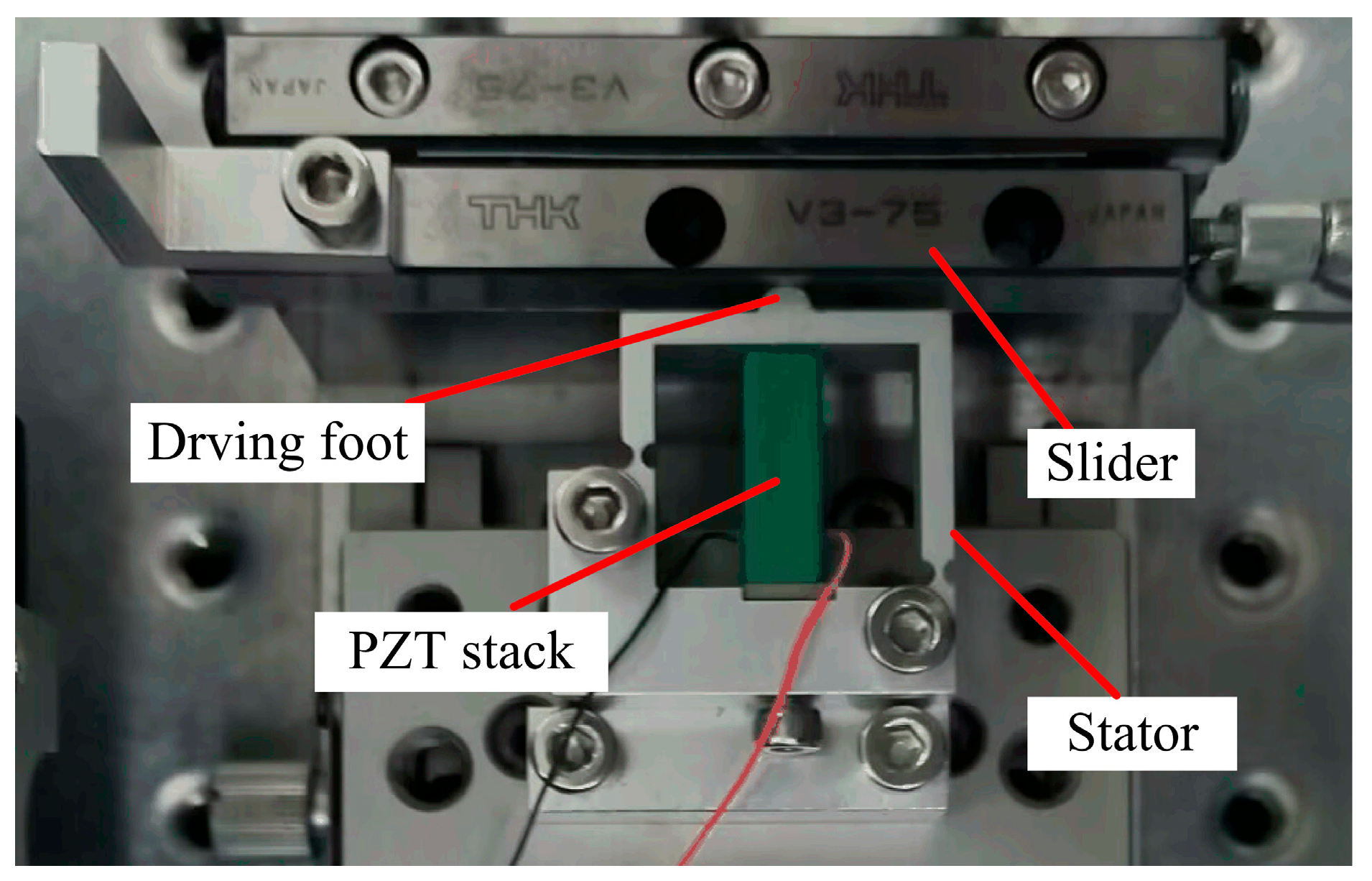
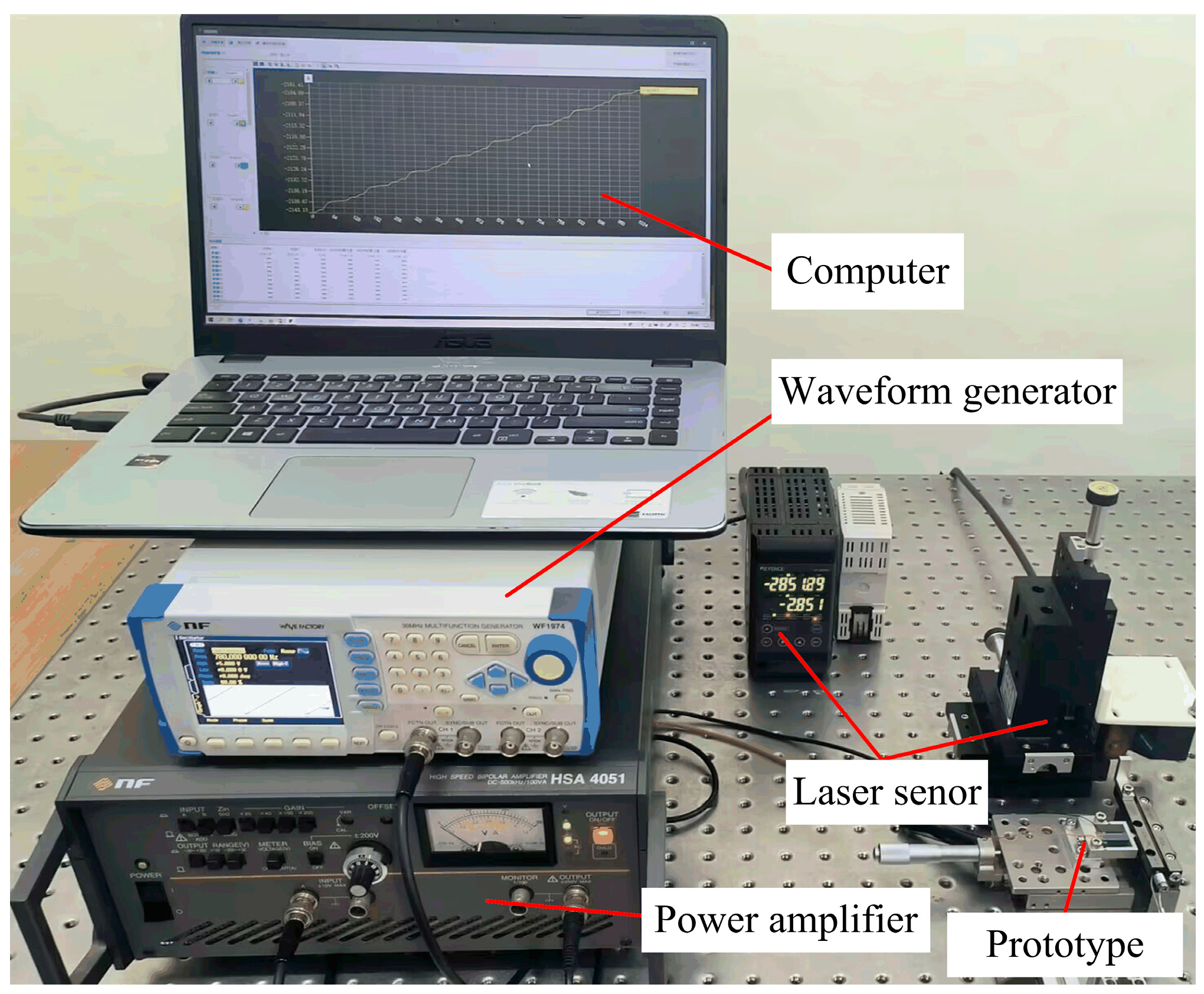
4. Experiment and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, M.; Fan, Z.; Ma, Z.; Zhao, H.; Guo, Y.; Hong, K.; Li, T.; Liu, H.; Wu, D. Design and Experimental Research of a Novel Stick-Slip Type Piezoelectric Actuator. Micromachines 2017, 8, 150. [Google Scholar] [CrossRef]
- Ali, A.; Pasha, R.; Elahi, H.; Sheeraz, M.; Bibi, S.; Hassan, Z.; Eugeni, M.; Gaudenzi, P. Investigation of Deformation in Bimorph Piezoelectric Actuator: Analytical, Numerical and Experimental Approach. Integr. Ferroelectr. 2019, 201, 94–109. [Google Scholar] [CrossRef]
- Wang, L.; Wang, H.; Cheng, T. Design and performance of a compact stick-slip type piezoelectric actuator based on right triangle flexible stator. Smart Mater. Struct. 2022, 31, 55013. [Google Scholar] [CrossRef]
- Singh, K.; Sharma, S.; Kumar, R.; Talha, M. Vibration control of cantilever beam using poling tuned piezoelectric actuator. Mech. Based Des. Struct. Mech. 2023, 51, 2217–2240. [Google Scholar] [CrossRef]
- Zhou, K.; Urasaki, S.; Yabuno, H. Cantilever self-excited with a higher mode by a piezoelectric actuator. Nonlinear Dyn. 2021, 106, 295–307. [Google Scholar] [CrossRef]
- Li, J.; Zhao, H.; Shao, M.; Zhou, X.; Fan, Z. Design and experimental research of an improved stick–slip type piezo-driven linear actuator. Adv. Mech. Eng. 2015, 7, 2071728589. [Google Scholar] [CrossRef]
- Wang, S.; Rong, W.; Wang, L.; Pei, Z.; Sun, L. Design, Analysis and Experimental Performance of a Bionic Piezoelectric Rotary Actuator. J. Bionic Eng. 2017, 14, 348–355. [Google Scholar] [CrossRef]
- Shao, Y.; Xu, M.; Shao, S.; Song, S. Effective dynamical model for piezoelectric stick–slip actuators in bi-directional motion. Mech. Syst. Signal Process. 2020, 145, 106964. [Google Scholar] [CrossRef]
- Zhong, B.; Zhu, J.; Jin, Z.; He, H.; Wang, Z.; Sun, L. A large thrust trans-scale precision positioning stage based on the inertial stick–slip driving. Microsyst. Technol. 2019, 25, 3713–3721. [Google Scholar] [CrossRef]
- Guo, Z.; Tian, Y.; Zhang, D.; Wang, T.; Wu, M. A novel stick-slip based linear actuator using bi-directional motion of micropositioner. Mech. Syst. Signal Process. 2019, 128, 37–49. [Google Scholar] [CrossRef]
- Gao, Q.; He, M.; Lu, X.; Zhang, C.; Cheng, T. Simple and high-performance stick-slip piezoelectric actuator based on an asymmetrical flexure hinge driving mechanism. J. Intell. Mater. Syst. Struct. 2019, 30, 2125–2134. [Google Scholar] [CrossRef]
- Huang, W.; Sun, M. Design, Analysis, and Experiment on a Novel Stick-Slip Piezoelectric Actuator with a Lever Mechanism. Micromachines 2019, 10, 863. [Google Scholar] [CrossRef]
- Hunstig, M. Piezoelectric inertia motors—A critical review of history, concepts, design, applications, and perspectives. Actuators 2017, 6, 7. [Google Scholar] [CrossRef]
- Chu, X.; Zhong, Z.; Zhu, C.; Zhao, Y.; Li, L. A novel low-voltage non-resonant piezoelectric linear actuator based on two alternative principles. Ferroelectrics 2016, 505, 147–158. [Google Scholar] [CrossRef]
- Delibas, B.; Koc, B. Electromechanical Model for Bi-Phase Piezo Inertia Drives. Actuator 2022, 256–259. [Google Scholar]
- Chen, W.; Wei, D.; Mei, Y.; Xu, Z.; Sun, Q.; Liu, Y.; Huang, H. A stick-slip piezoelectric actuator with an integrated sensing unit for the measurement and active control of the contact force. Mechatronics 2023, 91, 102954. [Google Scholar] [CrossRef]
- Huang, H.; Liu, Y.; Xu, Z.; Li, X.; Sun, W.; Wu, H. Design, analysis and experimental performances of a multi-mode friction inertial piezoelectric actuator. Precis. Eng. 2023, 80, 180–197. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Xu, Z.; Qin, F.; Wang, Z.; Zhu, H.; Zhao, H. Analysis and comparison of the effect of different drive feet on the output performance of stick–slip piezoelectric actuators. Mech. Syst. Signal Process. 2023, 186, 109752. [Google Scholar] [CrossRef]
- Li, J.; Huang, H.; Morita, T. Stepping piezoelectric actuators with large working stroke for nano-positioning systems: A review. Sens. Actuators A Phys. 2019, 292, 39–51. [Google Scholar] [CrossRef]
- Lin, S.; Ma, J.; Li, J.; Li, S.; Wang, M.; Hu, Y.; Wen, J. A novel inertial impact piezoelectric actuator with adjustable angle vibrators. Int. J. Mech. Sci. 2023, 244, 108071. [Google Scholar] [CrossRef]
- Wang, L.; Wang, H.; Zhang, Y.; Qiu, Z.; Cheng, T. Development of a piezoelectric actuator based on stick–slip principle inspired by the predation of snake. Rev. Sci. Instrum. 2023, 94, 25003. [Google Scholar] [CrossRef] [PubMed]
- Deng, J.; Yang, C.; Liu, Y.; Zhang, S.; Li, J.; Ma, X.; Xie, H. Design and experiments of a small resonant inchworm piezoelectric robot. Sci. China Technol. Sci. 2023, 66, 821–829. [Google Scholar] [CrossRef]
- Qiao, G.; Ning, P.; Xia, X.; Yu, Y.; Lu, X.; Cheng, T. Achieving Smooth Motion for Piezoelectric Stick–Slip Actuator with the Inertial Block Structure. IEEE Trans. Ind. Electron. 2022, 69, 3948–3958. [Google Scholar] [CrossRef]
- Cheng, C.; Hung, S. A Piezoelectric Two-Degree-of-Freedom Nanostepping Motor with Parallel Design. IEEE ASME Trans. Mechatron. 2016, 21, 2197–2199. [Google Scholar] [CrossRef]
- Yu, P.; Wang, L.; Zhang, S.; Jin, J. Transfer matrix modeling and experimental verification of forked piezoelectric actuators. Int. J. Mech. Sci. 2022, 232, 107604. [Google Scholar] [CrossRef]
- Qiu, C.; Ling, J.; Zhang, Y.; Ming, M.; Feng, Z.; Xiao, X. A novel cooperative compensation method to compensate for return stroke of stick-slip piezoelectric actuators. Mech. Mach. Theory 2021, 159, 104254. [Google Scholar] [CrossRef]
- Ning, P.; Xia, X.; Qiao, G.; Yang, S.; Ruan, W.; Lu, X.; Zheng, R.; Cheng, T. A dual-mode excitation method of flexure hinge type piezoelectric stick-slip actuator for suppressing backward motion. Sens. Actuators A Phys. 2021, 330, 112853. [Google Scholar] [CrossRef]
- Li, J.; Cai, J.; Wen, J.; Yao, J.; Huang, J.; Zhao, T.; Wan, N. A walking type piezoelectric actuator with two umbrella-shaped flexure mechanisms. Smart Mater. Struct. 2020, 29, 85014. [Google Scholar] [CrossRef]
- Lu, X.; Gao, Q.; Gao, Q.; Yu, Y.; Zhang, X.; Qiao, G.; Zhao, H.; Cheng, T. Design, modeling, and performance of a bidirectional stick-slip piezoelectric actuator with coupled asymmetrical flexure hinge mechanisms. J. Intell. Mater. Syst. Struct. 2020, 31, 1961–1972. [Google Scholar] [CrossRef]
- Huang, H.; Xu, Z.; Wang, J.; Dong, J. A low frequency operation high speed stick-slip piezoelectric actuator achieved by using a L-shape flexure hinge. Smart Mater. Struct. 2020, 29, 65007. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Z.; Huang, H. A novel stick-slip piezoelectric rotary actuator designed by employing a centrosymmetric flexure hinge mechanism. Smart Mater. Struct. 2020, 29, 125006. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, X.; Huang, H. Structure dependence of the output performances of a self-deformation driving (SDD) piezoelectric actuator. Sens. Actuators A Phys. 2020, 302, 111808. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, L.; Yu, X. A novel stick-slip piezoelectric actuator based on two-stage flexible hinge structure. Rev. Sci. Instrum. 2020, 91, 55006. [Google Scholar] [CrossRef]
- Lu, X.; Gao, Q.; Li, Y.; Yu, Y.; Zhang, X.; Qiao, G.; Cheng, T. A Linear Piezoelectric Stick-Slip Actuator via Triangular Displacement Amplification Mechanism. IEEE Access 2020, 8, 6515–6522. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Wang, H.; Jiang, J.; Luo, T. Development of a Novel Piezoelectric Actuator Based on Stick–Slip Principle by Using Asymmetric Constraint. Micromachines 2023, 14, 1140. https://doi.org/10.3390/mi14061140
Wang L, Wang H, Jiang J, Luo T. Development of a Novel Piezoelectric Actuator Based on Stick–Slip Principle by Using Asymmetric Constraint. Micromachines. 2023; 14(6):1140. https://doi.org/10.3390/mi14061140
Chicago/Turabian StyleWang, Liang, Heran Wang, Junxiang Jiang, and Tianwen Luo. 2023. "Development of a Novel Piezoelectric Actuator Based on Stick–Slip Principle by Using Asymmetric Constraint" Micromachines 14, no. 6: 1140. https://doi.org/10.3390/mi14061140