
An Electromagnetic-Driven Microshutter Array in a Field-of-View Gated Image System for All-Time Star Sensors
 ,
,  ,
,
Abstract
:1. Introduction
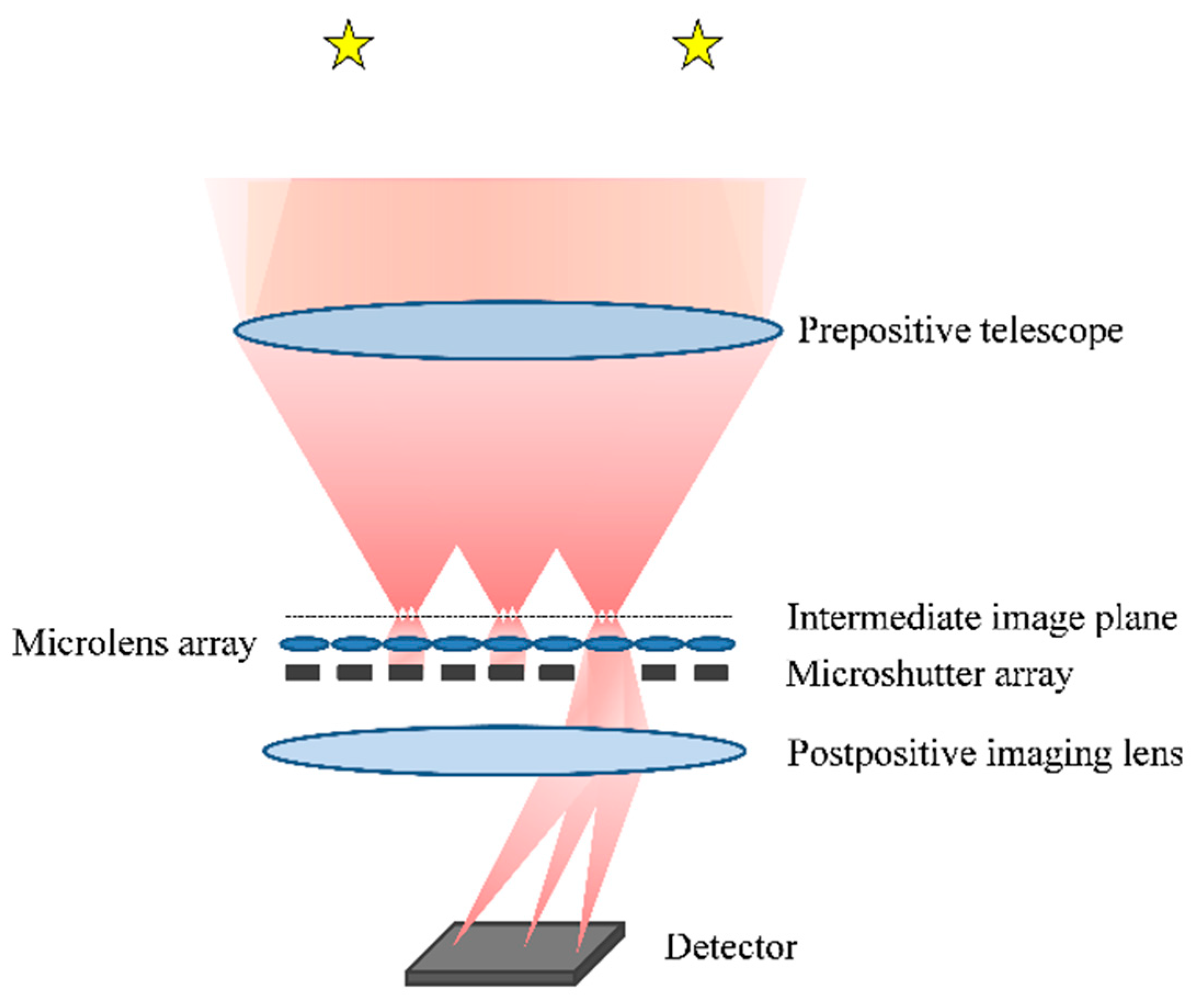
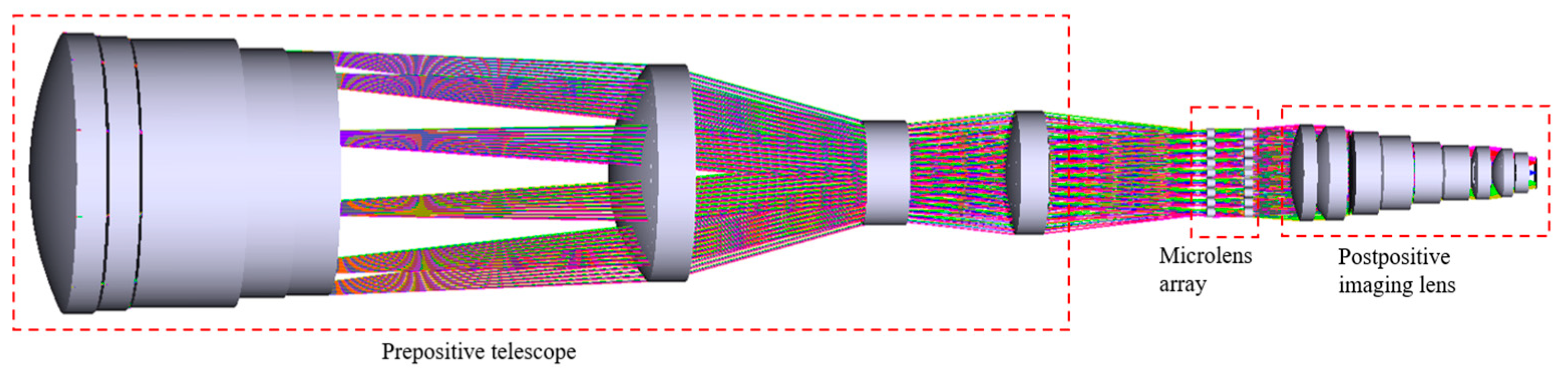
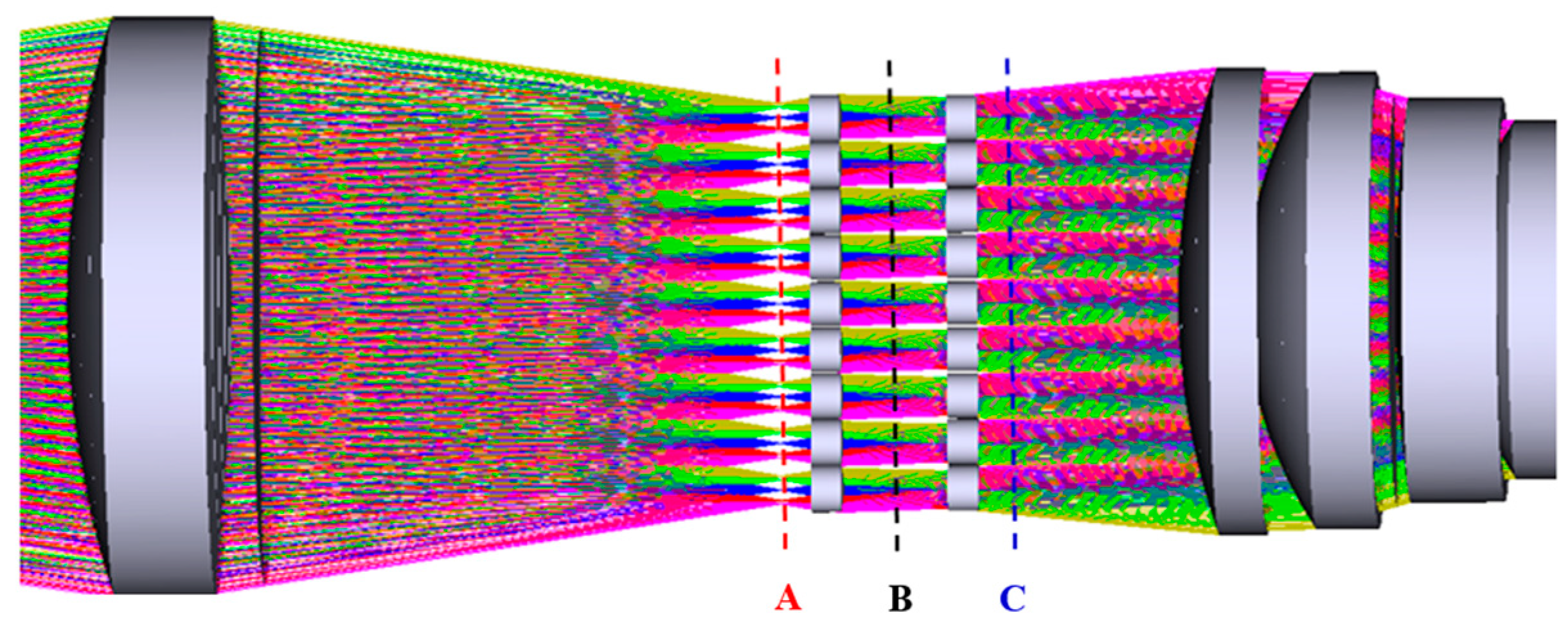
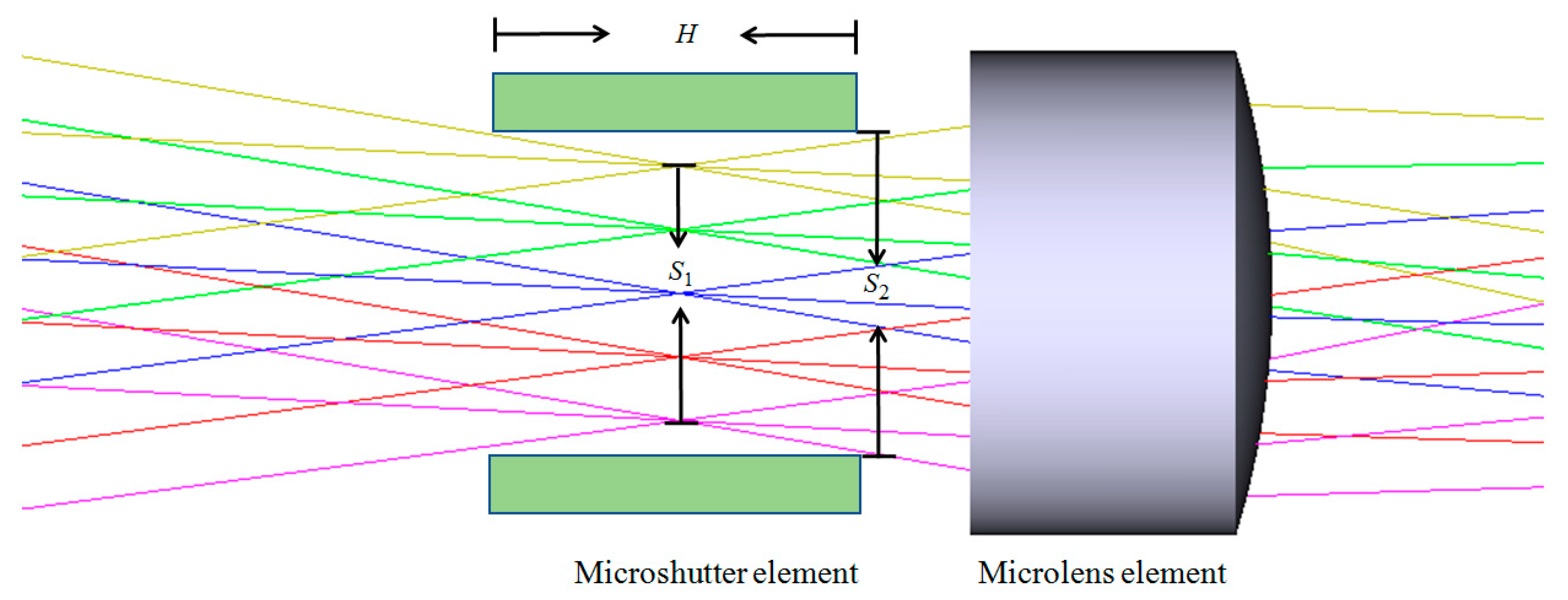
2. Design Requirements of a Microshutter Array in FOV-Gated Imaging System
3. Microshutter Array Design
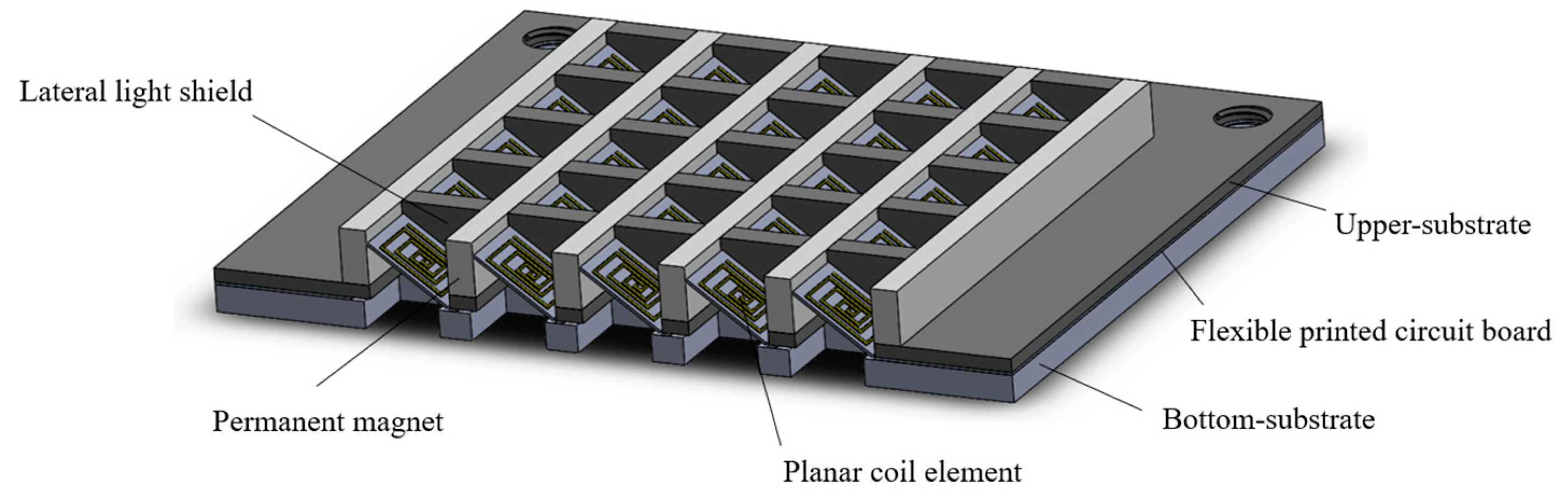
3.1. Microshutter Array Based on Electromagnetic Actuation
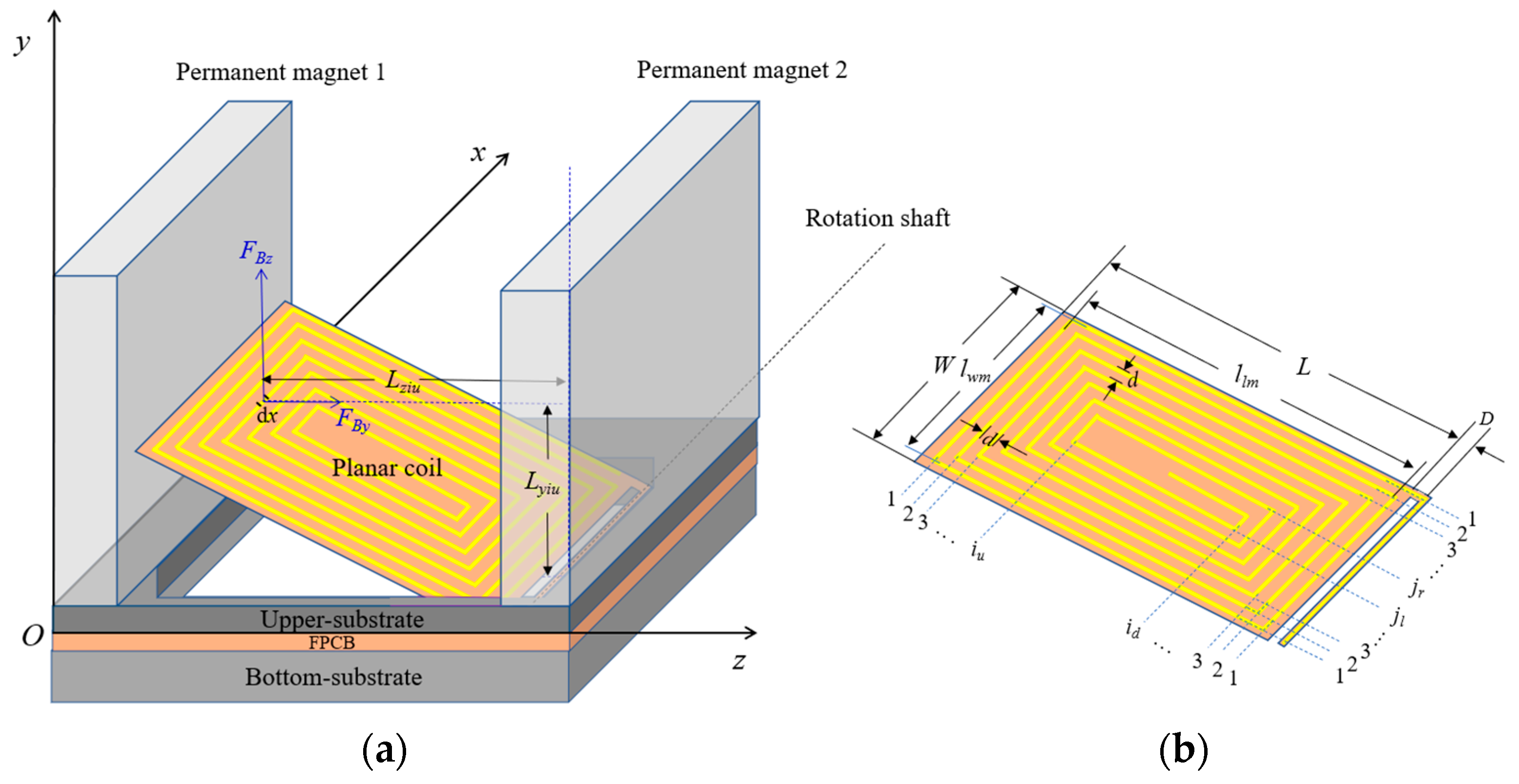
3.2. Electromagnetic Coil Element Design
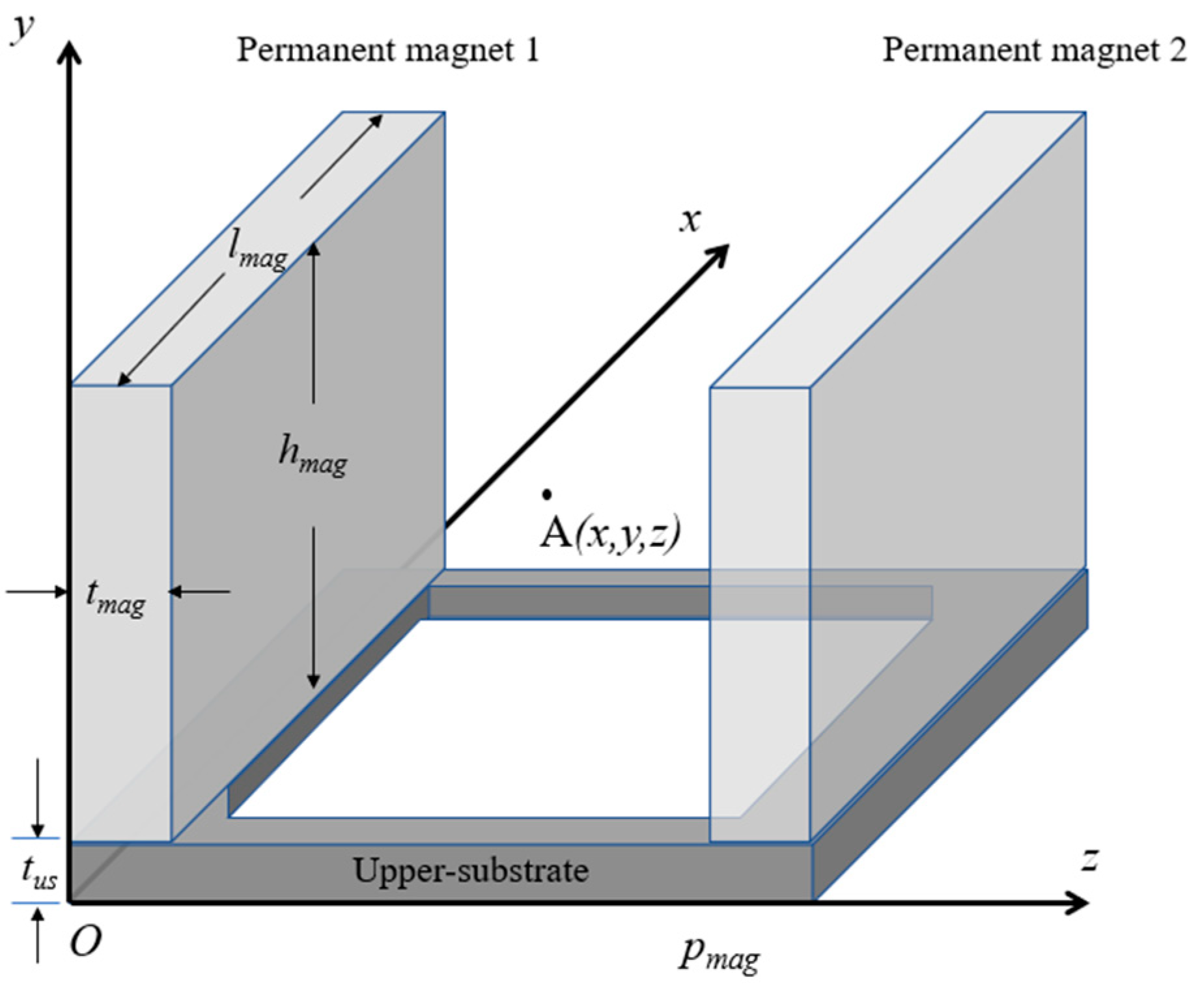
3.2.1. Magnetic Field Distribution in Microshutter Element
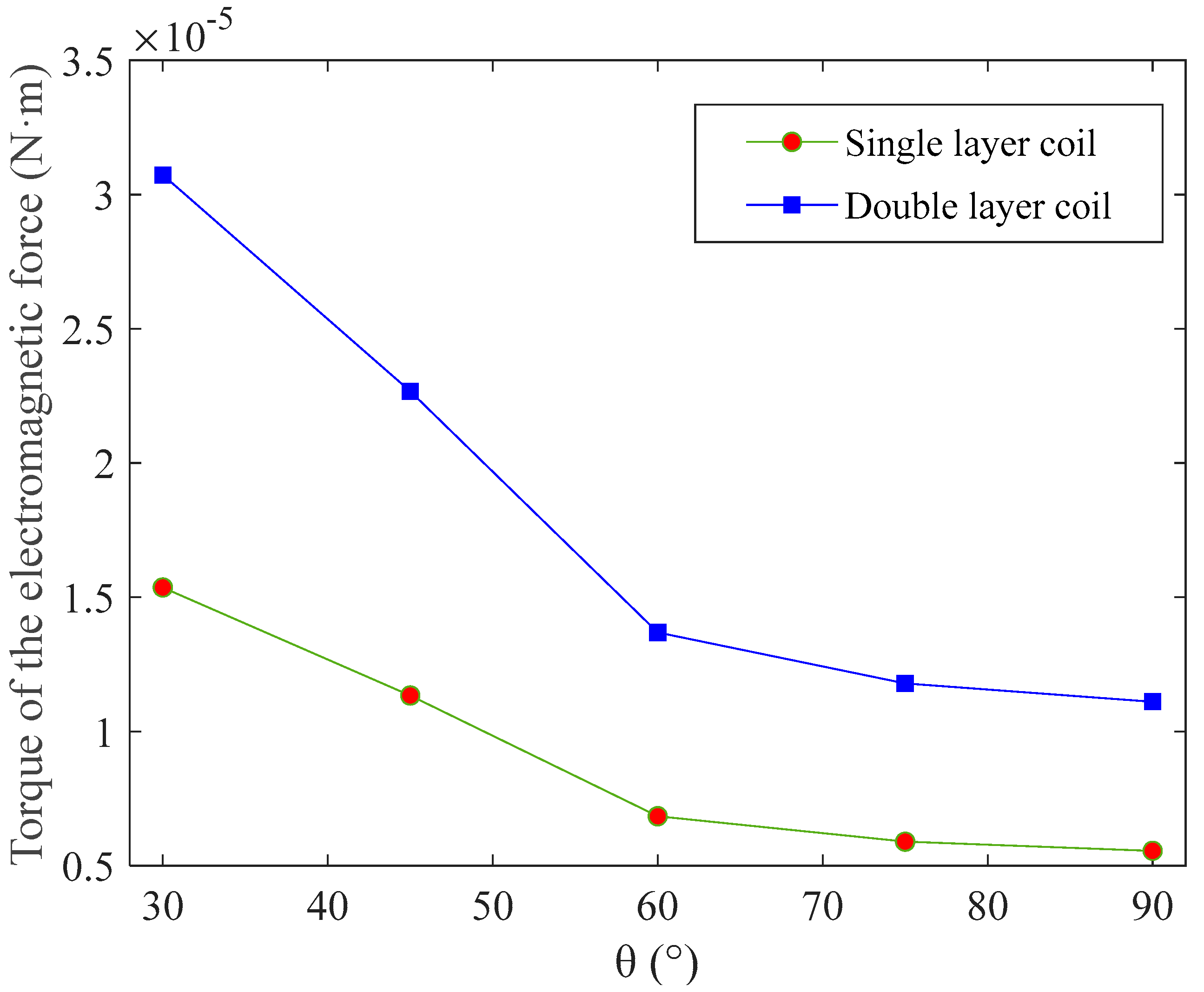
3.2.2. Effect of Coil Parameters on Electromagnetic Force Torque
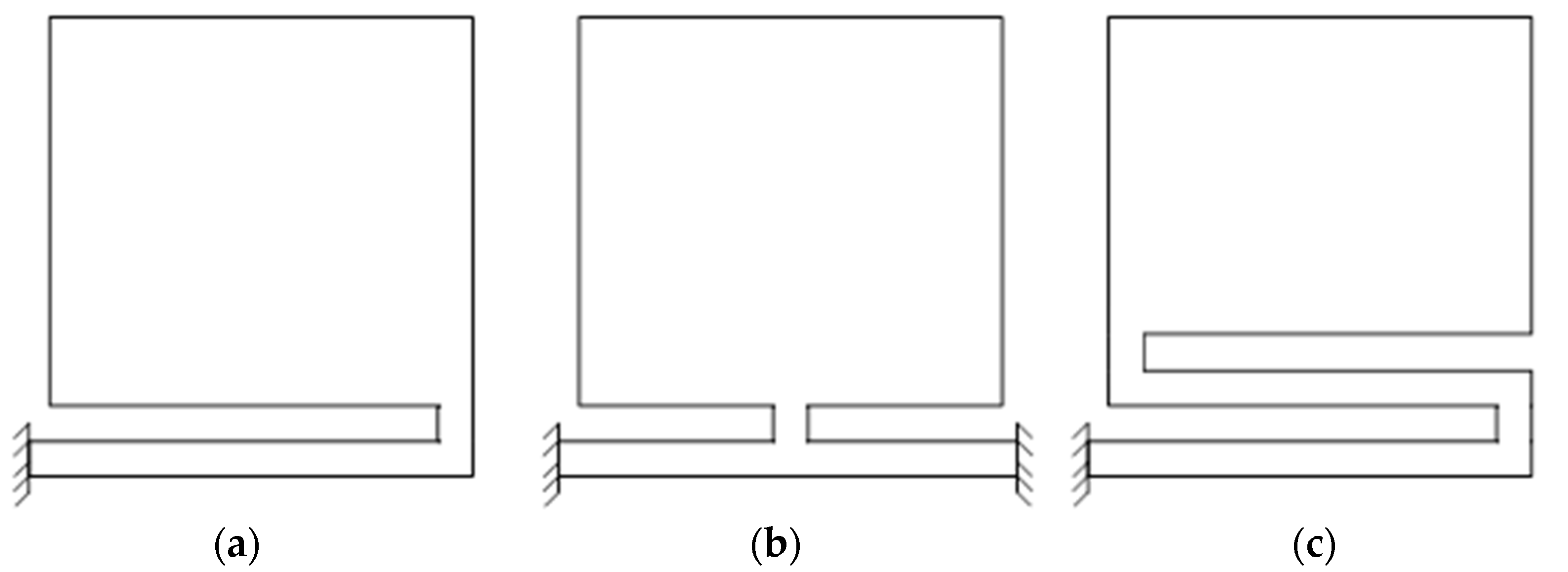
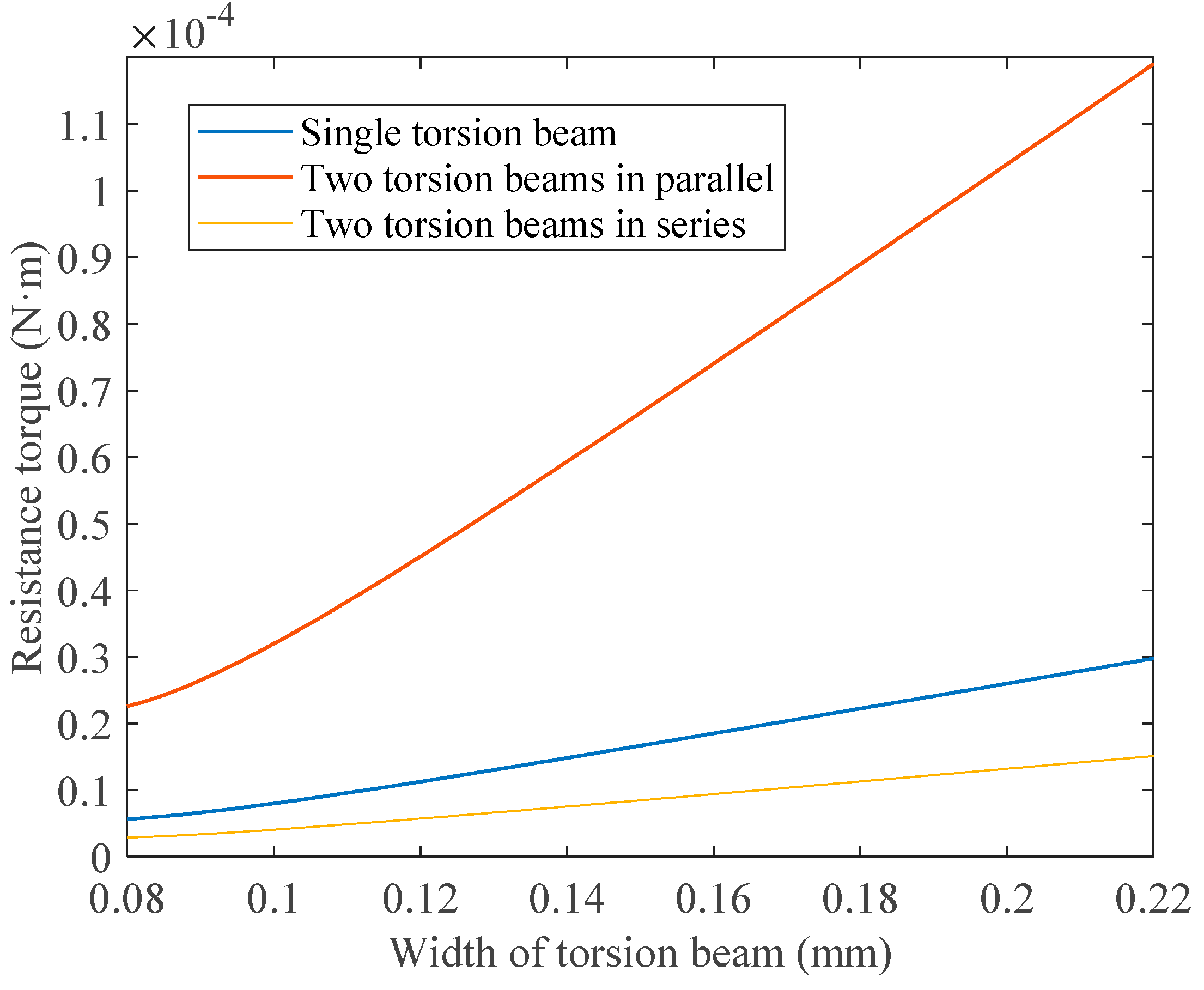
3.2.3. Effect of Torsion Beam Parameters on Resistance Torque
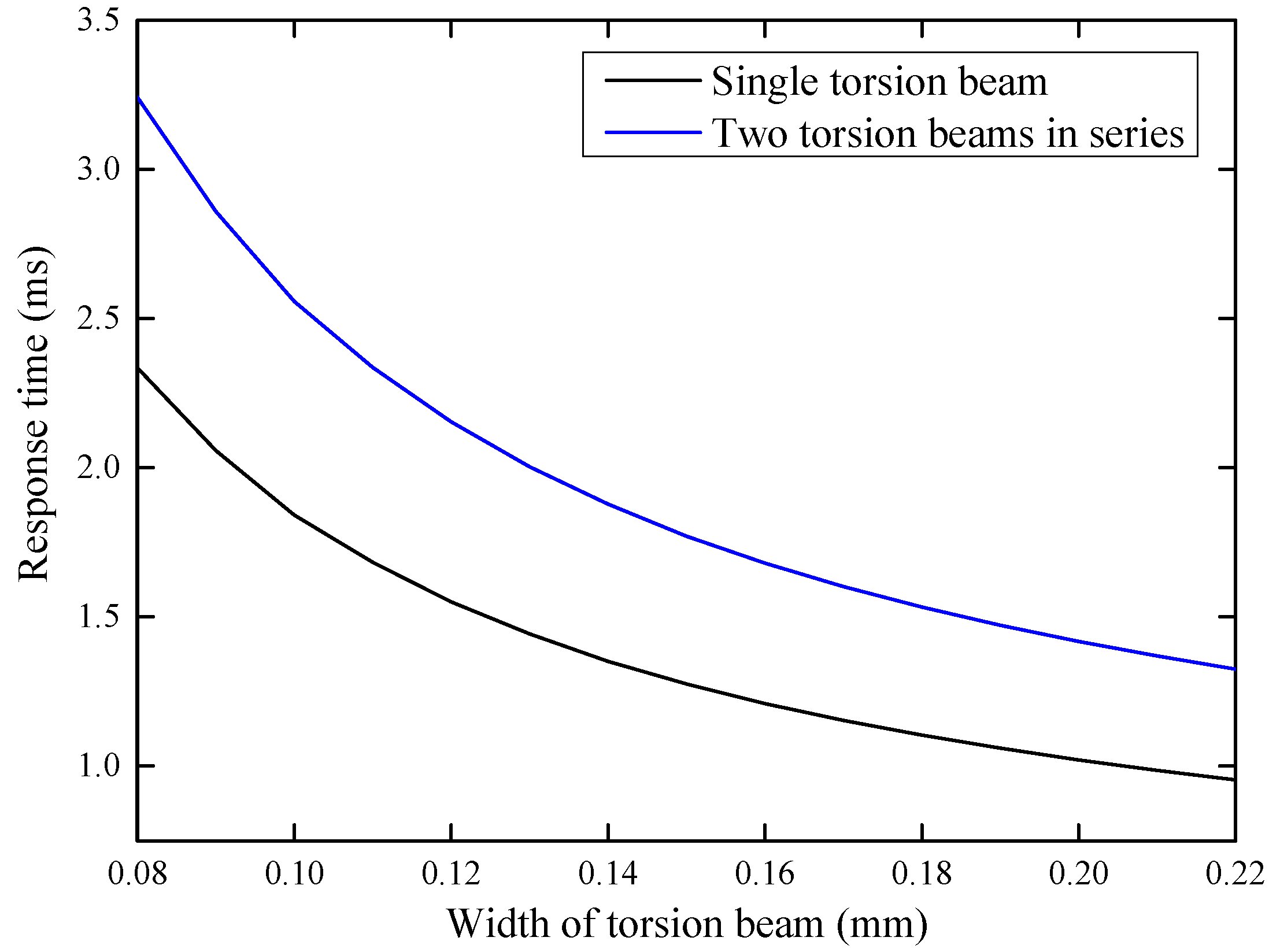
3.2.4. Effect of Coil Element Parameters on Switching Response Time
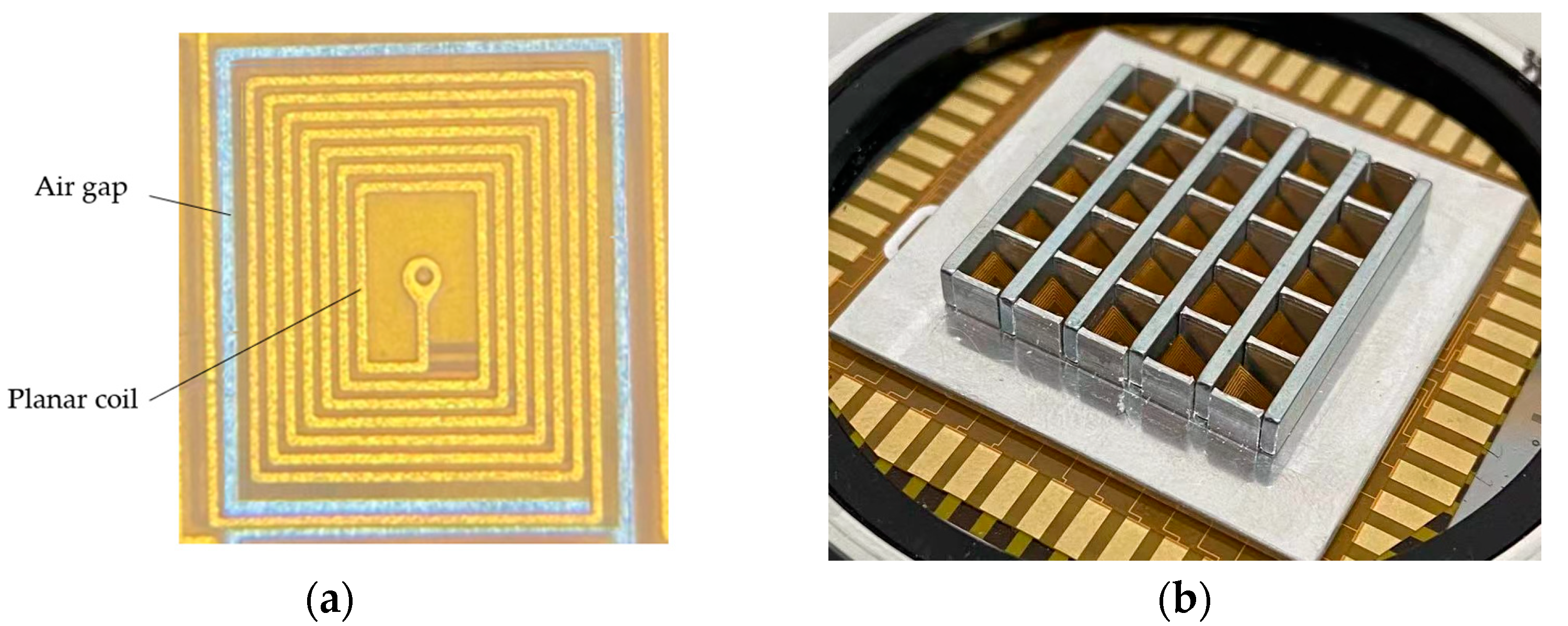
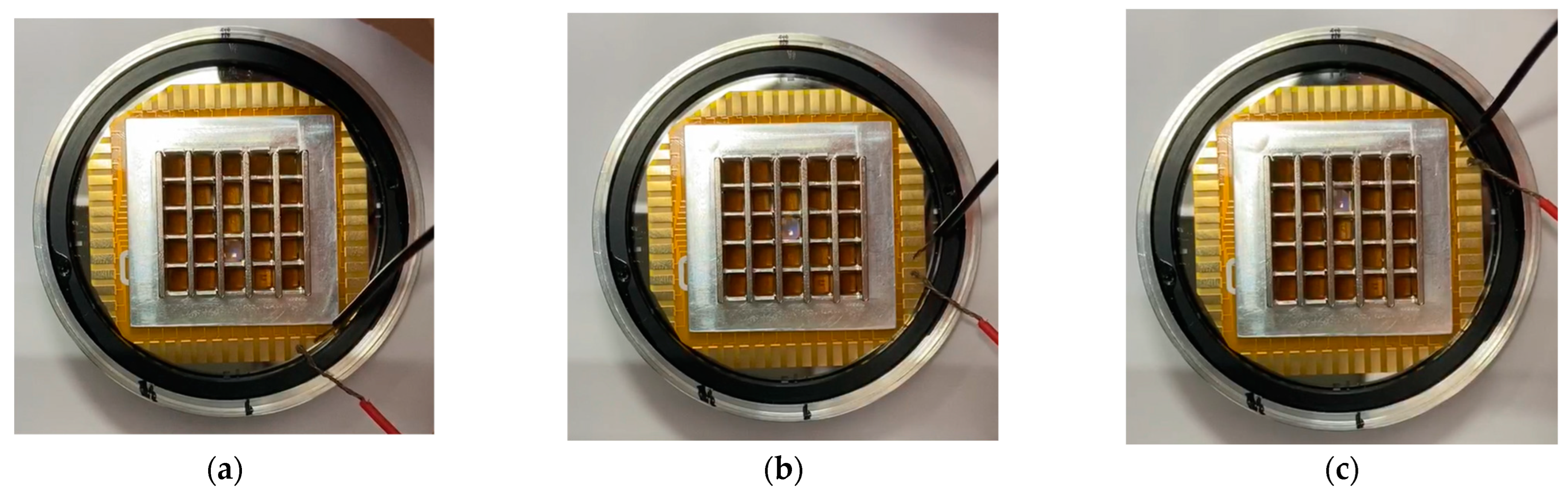
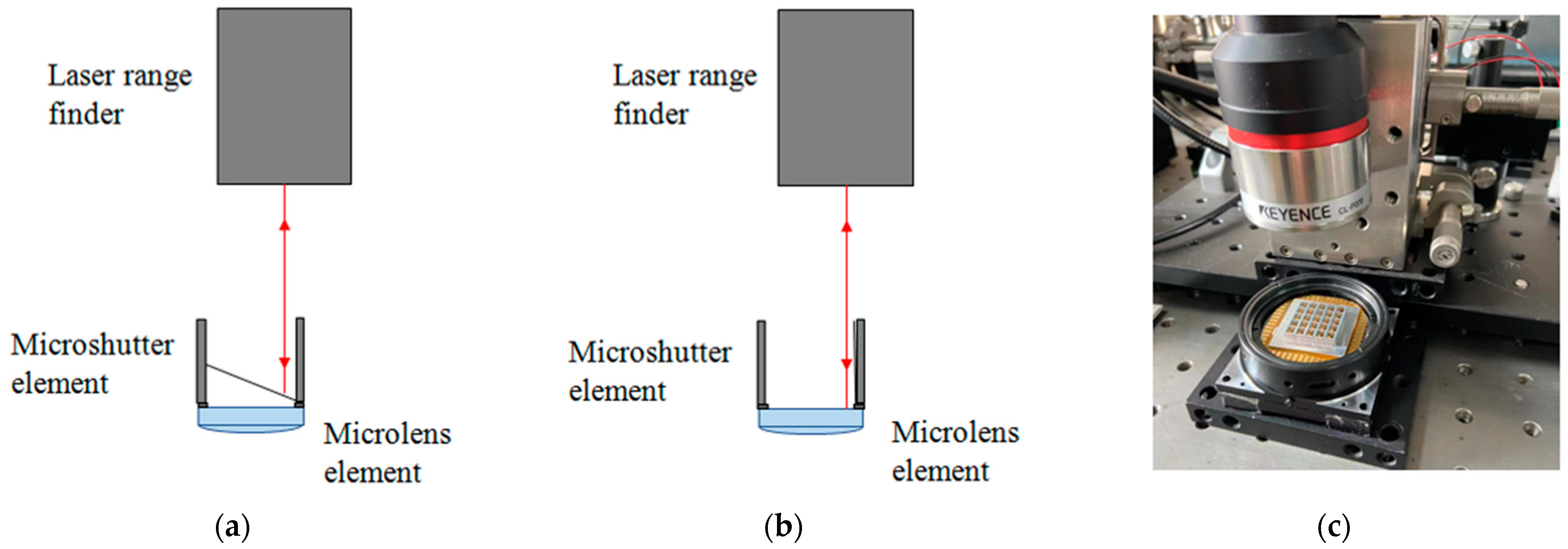
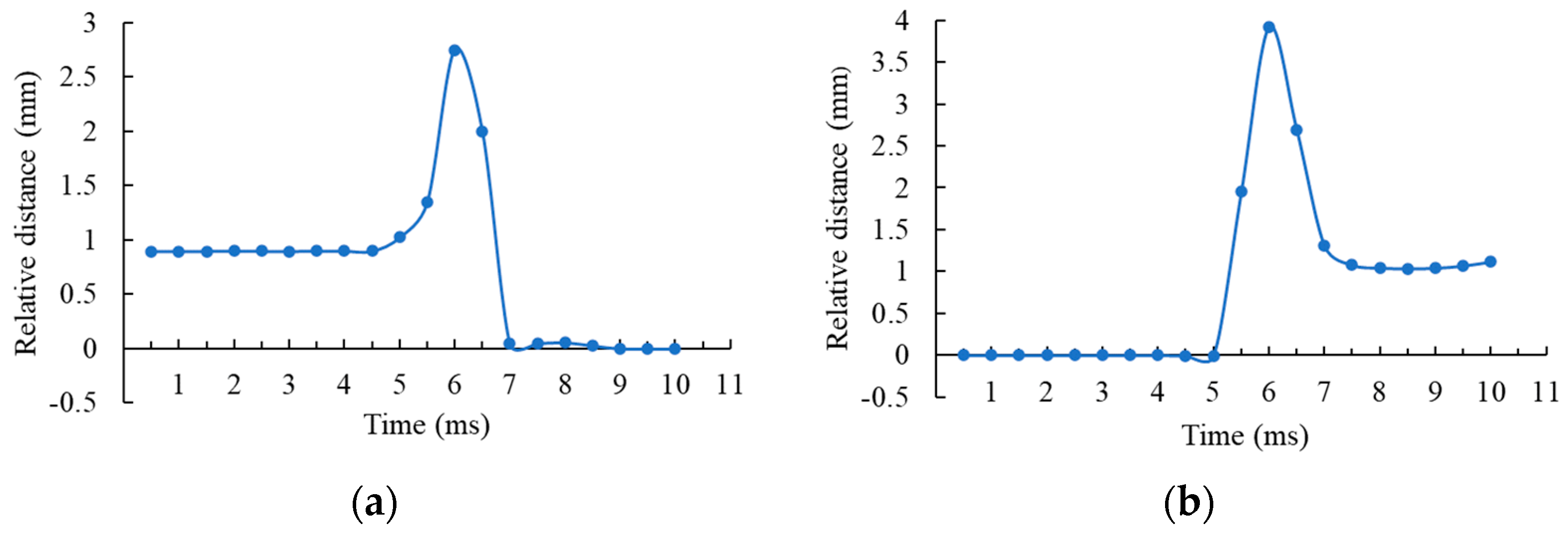
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liebe, C.C. Accuracy performance of star trackers—A tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Zhao, Y.; Wei, X.; Li, J.; Wang, G. Star identification algorithm based on K-L transformation and star walk formation. IEEE Sens. J. 2016, 16, 5202–5210. [Google Scholar] [CrossRef]
- Wei, X.; Cui, C.; Wang, G.; Wan, X. Autonomous positioning utilizing star sensor and inclinometer. Measurement 2019, 131, 132–142. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, C. An on-orbit calibration model for wide field of view star sensor based on the vector observations. Opto-Electron. Eng. 2017, 44, 505–510. [Google Scholar]
- Belenkii, M.; Bruns, D.G.; RYE, V.A.; Bringkley, T. Daytime Stellar Imager. US Patent 07349804B2, 25 March 2008. [Google Scholar]
- Liu, B.; Chen, F.; Zhang, T.; Zhong, D.; Yang, L.; Mao, Y. Precise attitude determination of ship based on star sensor. Appl. Mech. Mater. 2013, 380–384, 995–1002. [Google Scholar] [CrossRef]
- Zhou, Y.; Shen, W. Conceptual design of airborne daytime infrared star cameras. Proc. SPIE 2010, 7849, 217–225. [Google Scholar]
- Truesdale, N.; Dinkel, K.; Dischner, Z.; Diller, J. Daystar: Modeling and testing a daytime star tracker for high altitude balloon observatories. Adv. Astronaut. Sci. 2013, 149, 47–61. [Google Scholar]
- Alexander, C.D.; Swift, W.R.; Ghosh, K.; Ramsey, B.D. Design of a day/night star camera system. Proc. SPIE 1999, 3779, 47–54. [Google Scholar]
- Wang, W.; Wei, X.; Li, J.; Zhang, G. Guide star catalog generation for short-wave infrared (SWIR) all-time star sensor. Rev. Sci. Instrum. 2018, 89, 075003. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Xu, Q.; Wang, H.; Lyu, H.; Li, K. Guide Star Selection for the Three-FOV Daytime Star Sensor. Sensors 2019, 19, 1457. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, H.; Zhou, X.D.; Wang, X.M.; Tian, H. A survey of technology status and development of all-day star sensor in near-earth space. Acta Aeronaut. Astronaut. Sin. 2020, 41, 623719. [Google Scholar]
- Lewis, S.W.; Hockbruckner, M.; Reeve, J. Stellar Inertial navigation growing with the times upgrading of the LN-20 integrated inertial navigation system. In Proceedings of the 1991 National Technical Meeting of the Institute of Navigation, Phoenix, AZ, USA, 22–24 January 1991. [Google Scholar]
- Fang, L.; Liu, E.; Zhang, H.; Wei, X.; Cheng, X.; Liao, Z.; Zhao, R. Optical imaging system for an all-time star sensor based on field of view gated technology. Appl. Opt. 2022, 61, 5859–5868. [Google Scholar] [CrossRef] [PubMed]
- Mary, J.L.; Ari-David, B.; Devin, E.B.; Daniel, P.K.; Kyowon, K.; Alexander, S.K.; Samuel, H.M.; Vilem, M.; Lance, O. James Webb Space Telescope microshutter arrays and beyond. J. Micro/Nanolith. MEMS MOEMS 2017, 16, 025501. [Google Scholar]
- Mary, J.L.; Aguayo, E.; Brekosky, R.P.; Burns, D.E.; Carter, A.; Chang, M.P.; Costen, N.P.; Fettig, P.K.; Franz, D.E.; Greenhouse, M.A.; et al. Successful Demonstration of an Electrostatically Actuated Microshutter System for Space Telescope Flight Missions. J. Microelectromech. Syst. 2020, 29, 1079–1082. [Google Scholar]
- Jhabvala, M.D.; Franz, D.; King, T.; Kletetschka, G.; Kutyrev, A.S.; Mary, J.L.; Meyer, S.E.; Moseley, S.H.; Schwinger, S.; Silverberg, R. Development and operation of the microshutter array system. Proc. SPIE 2008, 6959, 66–82. [Google Scholar]
- Chang, M.P.; Brekosky, R.P.; Brown, A.D.; Costen, N.P.; Greenhouse, M.; Hu, G.; Kim, K.; Kotecki, C.A.; Kutyrev, A.S.; Li, M.J. Development of the Next Generation Microshutter Arrays for Space Telescope Applications. In Proceedings of the 2020 IEEE 15th International Conference on Nano/Micro Engineered and Molecular System (NEMS), San Diego, CA, USA, 27–30 September 2020. [Google Scholar]
- Liu, X.; Takahashi, T.; Konishi, M.; Motohara, K.; Toshiyoshi, H. Random access addressing of MEMS electrostatic shutter array for multi-object astronomical spectroscopy. Micromachines 2020, 11, 782. [Google Scholar] [CrossRef] [PubMed]
- Xiao, L.; Ding, Y.; Wang, P.; Xie, H. Analog-controlled light microshutters based on electrothermal actuation for smart windows. Opt. Express 2020, 28, 33106–33122. [Google Scholar] [CrossRef] [PubMed]
- Lv, X.; Wei, W.; Mao, X.; Chen, Y.; Yang, J.; Yang, F. A novel MEMS electromagnetic actuator with large displacement. Sens. Actuators A Phys. 2015, 221, 22–28. [Google Scholar] [CrossRef]
- Stephanus, B. Electromagnetic micromotors-design, fabrication and applications. Micromachines 2014, 4, 929–942. [Google Scholar]
- Gou, X.; Yang, Y.; Zheng, X. Analytic expression of magnetic field distribution of rectangular permanent magnets. Appl. Math. Mech. 2004, 25, 271–278. [Google Scholar]
- Ogata, K. Modern Control Engineering, 5th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Design Specification |
|---|---|
| Microshutter element size | 4 mm × 4 mm |
| Clear aperture of a microshutter element | 2.8 mm × 2.8 mm |
| Response time | ≤10 ms |
| Parameter | Value |
|---|---|
| Size of microshutter element | 4 mm × 4 mm |
| Size of coil element | 3.6 mm × 3.1 mm |
| Longest wire length along coil’s length directions | 3.3 mm |
| Longest wire length along coil’s width directions | 2.8 mm |
| Linewidth of wire | 0.1 mm |
| Adjacent wire distance | 0.15 mm |
| Number of coils turns | 7 turns in a single layer (14 turns in a double layer) |
| Torsion beam structure | Single torsion beam |
| Torsional beam length | 3.2 mm |
| Torsion beam width | 0.1 mm |
| Torsion beam thickness | 0.1 mm |
| Distance between coil element’ edge with torsion beam | 0.15 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, L.; Wang, W.; Wang, Q.; Tan, S.; Zhang, H.; Zhao, R.; Liu, E. An Electromagnetic-Driven Microshutter Array in a Field-of-View Gated Image System for All-Time Star Sensors. Micromachines 2023, 14, 452. https://doi.org/10.3390/mi14020452
Fang L, Wang W, Wang Q, Tan S, Zhang H, Zhao R, Liu E. An Electromagnetic-Driven Microshutter Array in a Field-of-View Gated Image System for All-Time Star Sensors. Micromachines. 2023; 14(2):452. https://doi.org/10.3390/mi14020452
Chicago/Turabian StyleFang, Liang, Weimin Wang, Qiang Wang, Shuliang Tan, Hui Zhang, Rujin Zhao, and Enhai Liu. 2023. "An Electromagnetic-Driven Microshutter Array in a Field-of-View Gated Image System for All-Time Star Sensors" Micromachines 14, no. 2: 452. https://doi.org/10.3390/mi14020452