
Research on Temperature Compensation of Multi-Channel Pressure Scanner Based on an Improved Cuckoo Search Optimizing a BP Neural Network


Abstract
:1. Introduction
- (1)
- A multi-channel temperature compensation model for pressure scanners is proposed;
- (2)
- Introducing the cuckoo algorithm into the field of multi-channel pressure sensor temperature compensation and improving the cuckoo algorithm by proposing a multi-channel high-precision compensation algorithm combined with neural networks;
- (3)
- The establishment of an experimental calibration system for multi-channel pressure scanners;
- (4)
- Our analysis and comparison of compensation results from different algorithms are combined with the error evaluation index, and the CS-BPNN algorithm is then applied to the compensation of the 32-channel pressure sensor of the pressure scanner.
2. Temperature Compensation Algorithm and Calibration Experimental System
2.1. Improved CS-BPNN Temperature Compensation Algorithm
2.1.1. BP Neural Network
2.1.2. Improved Cuckoo Search Algorithm
- (1)
- Each cuckoo lays one egg at a time and places it randomly in the nest.
- (2)
- Nests with good quality eggs will be retained for the next generation.
- (3)
- The number of available parasitic nests is fixed, and the host has a probability of finding an egg placed by a cuckoo. In this case, the host can either discard the egg or create a new nest.
2.1.3. Improved CS Optimizing a BP Neural Network
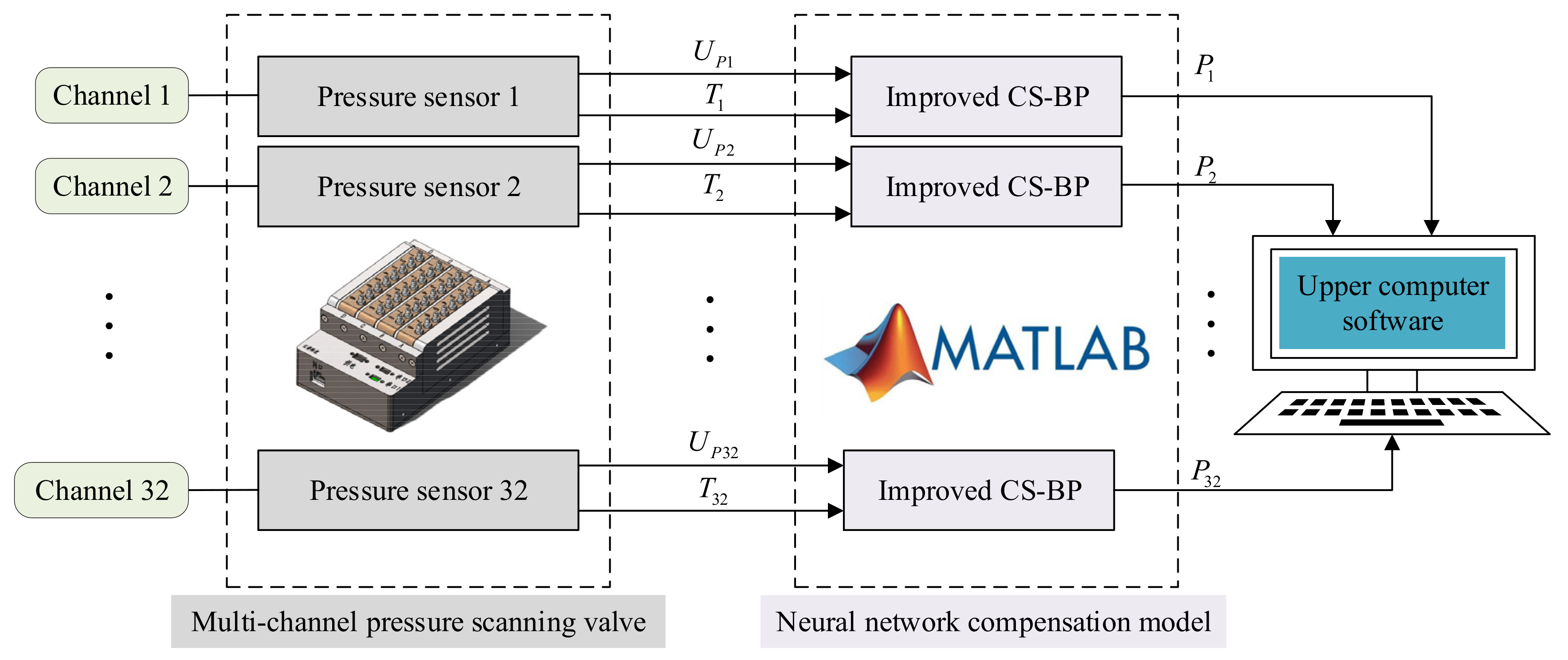
2.2. Calibration Experiment System
3. Results and Discussion
3.1. Calibration Experiment Results
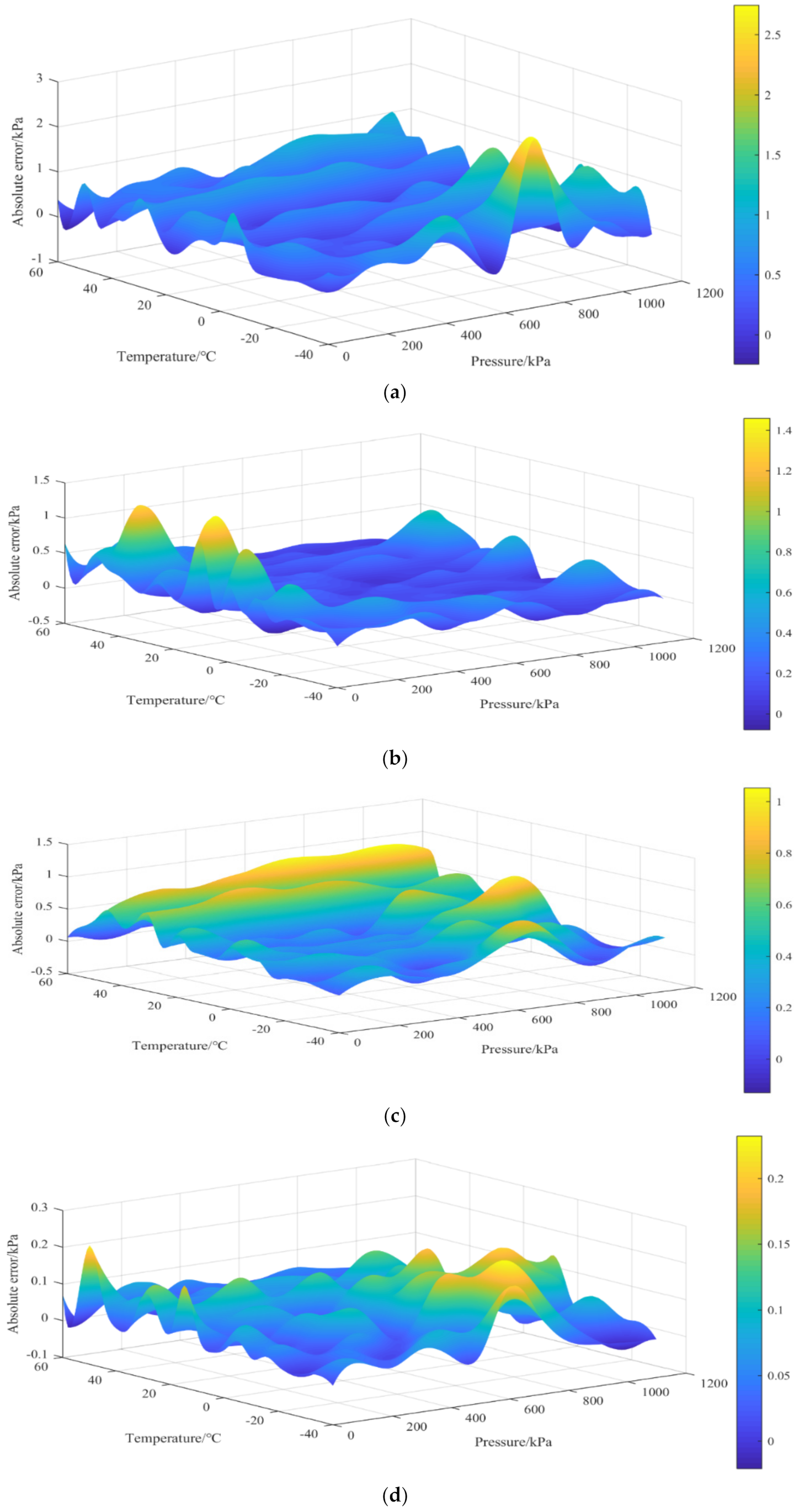
3.2. Analysis of Compensation Results
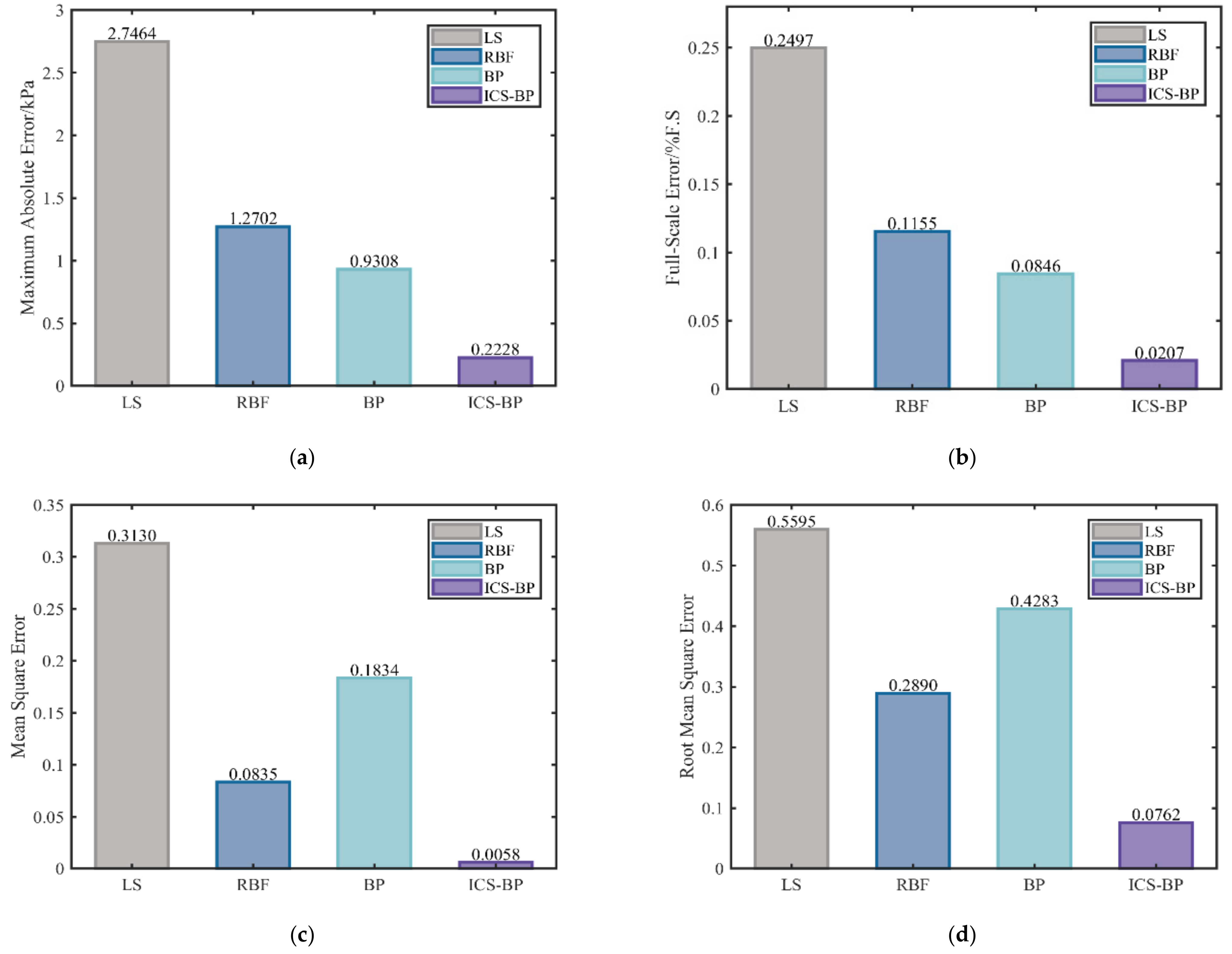
3.3. Evaluation of Error Indicators
3.4. Multi-Channel Test Results after Compensation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Beklemishchev, A.I.; Biryukov, V.I.; Blokin-Mechtalin, Y.K.; Vlasenko, V.M.; Svatkov, S.M.; Sudakov, V.A.; Petronevich, V.V.; Tashkinov, G.D.; Chekrygin, V.N. Measuring information system with multipoint modules for studies of pressure distribution on wind-tunnel models. Meas. Tech. 1994, 37, 925–928. [Google Scholar] [CrossRef]
- Donaldson, I.S. Accurate pressure measurements with novel scanning valve. Control Instrum. 1973, 5, 62–65. [Google Scholar]
- Meyer, C. Wind tunnel measurements with an electronically scanned multiport pressure sensor system. In Proceedings of the ICIASF’81 Record, International Congress on Instrumentation in Aerospace Simulation Facilities, Dayton, OH, USA, 30 September 1981; pp. 1–5. [Google Scholar]
- Dahland, M. An introduction to electronic pressure scanning applications. Sensors 1997, 14, 44–47. [Google Scholar]
- Semmelmayer, F.; Reeder, M.; Seymour, R. Determination of a probability distribution for pressure scanner noise and digitization uncertainty reporting. Meas. Sci. Technol. 2019, 30, 115011. [Google Scholar] [CrossRef]
- Wenli, C.; Hui, L.; Hui, H. An experimental study of the unsteady vortex and flow structures around twin-box-girder bridge deck models. In Proceedings of the 31st AIAA Applied Aerodynamics Conference, San Diego, CA, USA, 24–27 June 2013; pp. 1–11. [Google Scholar]
- Popov, A.V.; Grigorie, L.T.; Botez, R.; Mamou, M.; Mebarki, Y. Closed-Loop Control Validation of a Morphing Wing Using Wind Tunnel Tests. J. Aircr. 2010, 47, 1309–1317. [Google Scholar] [CrossRef]
- Aryafar, M.; Hamedi, M.; Ganjeh, M.M. A novel temperature compensated piezoresistive pressure sensor. Measurement 2015, 63, 25–29. [Google Scholar] [CrossRef]
- Jiang, B.; Chen, M.; Chen, F. A clock drift compensation method for synchronous sampling in sensor networks. Meas. Sci. Technol. 2019, 30, 025103. [Google Scholar] [CrossRef]
- Perraud, E. Theoretical model of performance of a silicon piezoresistive pressure sensor. Sens. Actuators A 1996, A57, 245–252. [Google Scholar] [CrossRef]
- Poussier, S.; Rabah, H.; Weber, S. Adaptable thermal compensation system for strain gage sensors based on programmable chip. Sens. Actuators A 2005, 119, 412–417. [Google Scholar] [CrossRef]
- Kolen, P.T. Self-calibration compensation technique for microcontroller-based sensor arrays. IEEE Trans. Instrum. Meas. 1994, 43, 620–623. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimized backpropagation neural network. Sens. Actuators A 2020, 316, 112393. [Google Scholar] [CrossRef]
- Tkac, A.M. Optimum unit conversion for electronic pressure scanning systems. In Proceedings of the 38th International Instrumentation Symposium, Las Vegas, NA, USA, 27–30 April 1992; pp. 821–827. [Google Scholar]
- Chen, G.; Zhou, S.; Ni, J.; Huang, H. Adaptive Nonlinearity Compensation System for Integrated Temperature and Moisture Sensor. Micromachines 2019, 10, 878. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, L.; Boshan, S.; Pengyu, J.; Zhihong, F.; Lixia, G.; Qiyun, F.; Jijun, X. A 4-Channel High-Precision Real-Time Pressure Test System for Irregularly Variable High Temperature Environments. IEEE Sens. J. 2022, 22, 8104–8112. [Google Scholar] [CrossRef]
- Ren, F.; Zhang, W.; Li, Y.; Lan, Y.; Xie, Y.; Dai, W. The Temperature Compensation of FBG Sensor for Monitoring the Stress on Hole-Edge. IEEE Photon. J. 2018, 10, 7104309. [Google Scholar] [CrossRef]
- Pramanik, C.; Islam, T.; Saha, H. Temperature compensation of piezoresistive micro-machined porous silico n pressure sensor by ANN. Microelectron. Reliab. 2006, 46, 343–351. [Google Scholar] [CrossRef]
- Medrano-Marques, N.J.; Martin-del-Brio, B. Sensor linearization with neural networks. IEEE Trans. Ind. Electron. 2001, 48, 1288–1290. [Google Scholar] [CrossRef]
- Han, Z.; Hong, L.; Meng, J.; Li, Y.; Gao, Q. Temperature drift modeling and compensation of capacitive accelerometer based on AGA-BP neural network. Measurement 2020, 164, 108019. [Google Scholar] [CrossRef]
- Zhang, R.; Duan, Y.; Zhao, Y.; He, X. Temperature Compensation of Elasto-Magneto-Electric (EME) Sensors in Cable Force Monitoring Using BP Neural Network. Sensors 2018, 18, 2176. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kayed, M.O.; Balbola, A.A.; Lou, E.; Moussa, W.A. Hybrid Smart Temperature Compensation System for Piezoresistive 3D Stress Sensors. IEEE Sens. J. 2020, 20, 13310–13317. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Y.; Liu, Q.; Gu, F.; Mao, X.; Li, M. Research on High-Precision, Low Cost Piezoresistive MEMS-Array Pressure Transmitters Based on Genetic Wavelet Neural Networks for Meteorological Measurements. Micromachines 2015, 6, 554–573. [Google Scholar] [CrossRef] [Green Version]
- Liang, H.; Chen, H.; Lu, Y. Research on sensor error compensation of comprehensive logging unit based on machine learning. J. Intell. Fuzzy Syst. 2019, 37, 3113–3123. [Google Scholar] [CrossRef]
- Zhou, G.; Zhao, Y.; Guo, F. A Temperature Compensation System for Silicon Pressure sensor Based on Neural Networks. In Proceedings of the 9th IEEE International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Waikiki Beach, HI, USA, 13–16 April 2014. [Google Scholar]
- Hong, Z.; Yanhua, M. Approaches to Realize Temperature Compensation of Pressure Sensor Based on Genetic Wavelet Neural Network. In Proceedings of the 2010 Sixth International Conference on Natural Computation, Yantai, China, 10–12 August 2010; pp. 189–194. [Google Scholar]
- Xing, Y.; Li, F. Research on the influence of hidden layers on the prediction accuracy of GA-BP neural network. J. Phys. Conf. Ser. 2020, 1486, 022010. [Google Scholar] [CrossRef]
- Ding, S.; Su, C.; Yu, J. An optimizing BP neural network algorithm based on genetic algorithm. Artif. Intel. Rev. 2011, 36, 153–162. [Google Scholar] [CrossRef]
- Yang, X.-S.; Deb, S. Cuckoo Search via Levey Flights. In Proceedings of the World Congress on Nature and Biologically Inspired Computing, Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Meng, X.; Chang, J.; Wang, X.; Wang, Y. Multi-objective hydropower station operation using an improved cuckoo search algorithm. Energy 2019, 168, 425–439. [Google Scholar] [CrossRef]
- Joshi, A.S.; Kulkarni, O.; Kakandikar, G.M.; Nandedkar, V.M. Cuckoo Search Optimization-A Review. In Proceedings of the International Conference on Advancements in Aeromechanical Materials for Manufacturing (ICAAMM), Hyderabad, India, 5 July 2017; pp. 7262–7269. [Google Scholar]
- Cao, Z.; Zhang, Y.; Guan, J.; Zhou, S.; Wen, G. A Chaotic Ant Colony Optimized Link Prediction Algorithm. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5274–5288. [Google Scholar] [CrossRef]
- Pluhacek, M.; Senkerik, R.; Davendra, D. Chaos particle swarm optimization with Eensemble of chaotic systems. Swarm Evol. Comput. 2015, 25, 29–35. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Yang, X.S.; Talatahari, S.; Alavi, A.H. Firefly algorithm with chaos. Commun. Nonlinear Sci. Numer. 2013, 18, 89–98. [Google Scholar] [CrossRef]
- He, Y.; Zhou, J.; Kou, P.; Lu, N.; Zou, Q. A fuzzy clustering iterative model using chaotic differential evolution algorithm for evaluating flood disaster. Expert Syst. Appl. 2011, 38, 10060–10065. [Google Scholar] [CrossRef]
- Zandavi, S.M.; Chung, V.Y.Y.; Anaissi, A. Stochastic Dual Simplex Algorithm: A Novel Heuristic Optimization Algorithm. IEEE Trans. Cybern. 2021, 51, 2725–2734. [Google Scholar] [CrossRef]
- Zhang, Y. Chaotic neural network algorithm with competitive learning for global optimization. Knowl.-Based Syst. 2021, 231, 107405. [Google Scholar] [CrossRef]
- Kelidari, M.; Hamidzadeh, J. Feature selection by using chaotic cuckoo optimization algorithm with levy flight, opposition-based learning and disruption operator. Soft Comput. 2021, 25, 2911–2933. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 100 kPa | 200 kPa | 300 kPa | 400 kPa | 500 kPa | 600 kPa | 700 kPa | 800 kPa | 900 kPa | 1000 kPa | 1100 kPa | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| −40 | −0.6544 | 0.0721 | 0.8995 | 1.6354 | 2.3938 | 3.1634 | 3.9241 | 4.6678 | 5.4448 | 6.2075 | 6.9702 | 7.7329 |
| −30 | −0.6446 | 0.0675 | 0.8847 | 1.6304 | 2.3950 | 3.1272 | 3.8396 | 4.5769 | 5.2963 | 6.0775 | 6.8224 | 7.5674 |
| −20 | −0.6363 | 0.0595 | 0.8587 | 1.6064 | 2.3264 | 3.0791 | 3.7968 | 4.5311 | 5.2971 | 6.0223 | 6.7428 | 7.4892 |
| −15 | −0.6305 | 0.0592 | 0.8132 | 1.5766 | 2.3069 | 3.0439 | 3.7715 | 4.5089 | 5.2366 | 5.9463 | 6.7028 | 7.3531 |
| −10 | −0.6243 | 0.0602 | 0.8233 | 1.5591 | 2.3106 | 3.0358 | 3.7664 | 4.4836 | 5.1590 | 5.9089 | 6.6099 | 7.3398 |
| −5 | −0.6150 | 0.0653 | 0.8156 | 1.5568 | 2.2832 | 2.9770 | 3.7009 | 4.4195 | 5.1359 | 5.8534 | 6.5319 | 7.2584 |
| 0 | −0.6143 | 0.0595 | 0.8020 | 1.5332 | 2.2562 | 2.9790 | 3.6479 | 4.3764 | 5.0720 | 5.7336 | 6.4786 | 7.2054 |
| 5 | −0.6098 | 0.0582 | 0.7831 | 1.5535 | 2.2338 | 2.9326 | 3.6121 | 4.3407 | 5.0459 | 5.7050 | 6.4591 | 7.0797 |
| 10 | −0.6043 | 0.0533 | 0.7867 | 1.4924 | 2.2027 | 2.8981 | 3.5666 | 4.2766 | 4.9530 | 5.6362 | 6.3259 | 7.0361 |
| 15 | −0.5919 | 0.0535 | 0.7757 | 1.4783 | 2.1566 | 2.8808 | 3.5260 | 4.2213 | 4.9645 | 5.5954 | 6.2701 | 6.9652 |
| 20 | −0.5884 | 0.0575 | 0.7715 | 1.4520 | 2.1655 | 2.8164 | 3.5328 | 4.1861 | 4.8657 | 5.5198 | 6.2383 | 6.9312 |
| 25 | −0.5780 | 0.0616 | 0.7847 | 1.4486 | 2.1301 | 2.8145 | 3.4841 | 4.1436 | 4.8074 | 5.4984 | 6.1124 | 6.8323 |
| 30 | −0.5687 | 0.0678 | 0.7655 | 1.4440 | 2.1053 | 2.7883 | 3.4591 | 4.1319 | 4.7978 | 5.4717 | 6.1020 | 6.7908 |
| 35 | −0.5663 | 0.0620 | 0.7555 | 1.4275 | 2.1018 | 2.7673 | 3.4373 | 4.0972 | 4.7404 | 5.4039 | 6.0393 | 6.7024 |
| 40 | −0.5594 | 0.0610 | 0.7488 | 1.4143 | 2.0923 | 2.7319 | 3.3950 | 4.0350 | 4.7034 | 5.3080 | 5.9640 | 6.6825 |
| 45 | −0.5496 | 0.0646 | 0.7439 | 1.4003 | 2.0722 | 2.7120 | 3.3745 | 3.9868 | 4.6585 | 5.2856 | 5.9044 | 6.5588 |
| 50 | −0.5545 | 0.0643 | 0.7241 | 1.3731 | 2.0168 | 2.6703 | 3.3235 | 3.8903 | 4.6142 | 5.1811 | 5.8767 | 6.5064 |
| 55 | −0.5432 | 0.0560 | 0.7141 | 1.3700 | 2.0314 | 2.6536 | 3.2769 | 3.8782 | 4.5352 | 5.1928 | 5.8147 | 6.4163 |
| 60 | −0.5355 | 0.0610 | 0.7232 | 1.3682 | 2.0208 | 2.6323 | 3.2610 | 3.8646 | 4.5009 | 5.1045 | 5.7520 | 6.3763 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zeng, Q.; Zhang, Z.; Wang, H. Research on Temperature Compensation of Multi-Channel Pressure Scanner Based on an Improved Cuckoo Search Optimizing a BP Neural Network. Micromachines 2022, 13, 1351. https://doi.org/10.3390/mi13081351
Wang H, Zeng Q, Zhang Z, Wang H. Research on Temperature Compensation of Multi-Channel Pressure Scanner Based on an Improved Cuckoo Search Optimizing a BP Neural Network. Micromachines. 2022; 13(8):1351. https://doi.org/10.3390/mi13081351
Chicago/Turabian StyleWang, Huan, Qinghua Zeng, Zongyu Zhang, and Hongfu Wang. 2022. "Research on Temperature Compensation of Multi-Channel Pressure Scanner Based on an Improved Cuckoo Search Optimizing a BP Neural Network" Micromachines 13, no. 8: 1351. https://doi.org/10.3390/mi13081351