
Silicon-on-Insulator Optical Waveguide Pressure Sensor Based on Mach-Zehnder Interferometer


Abstract
:1. Introduction
2. Principle of Pressure Sensors
3. Optimization of an MZI Ridge Optical Waveguide
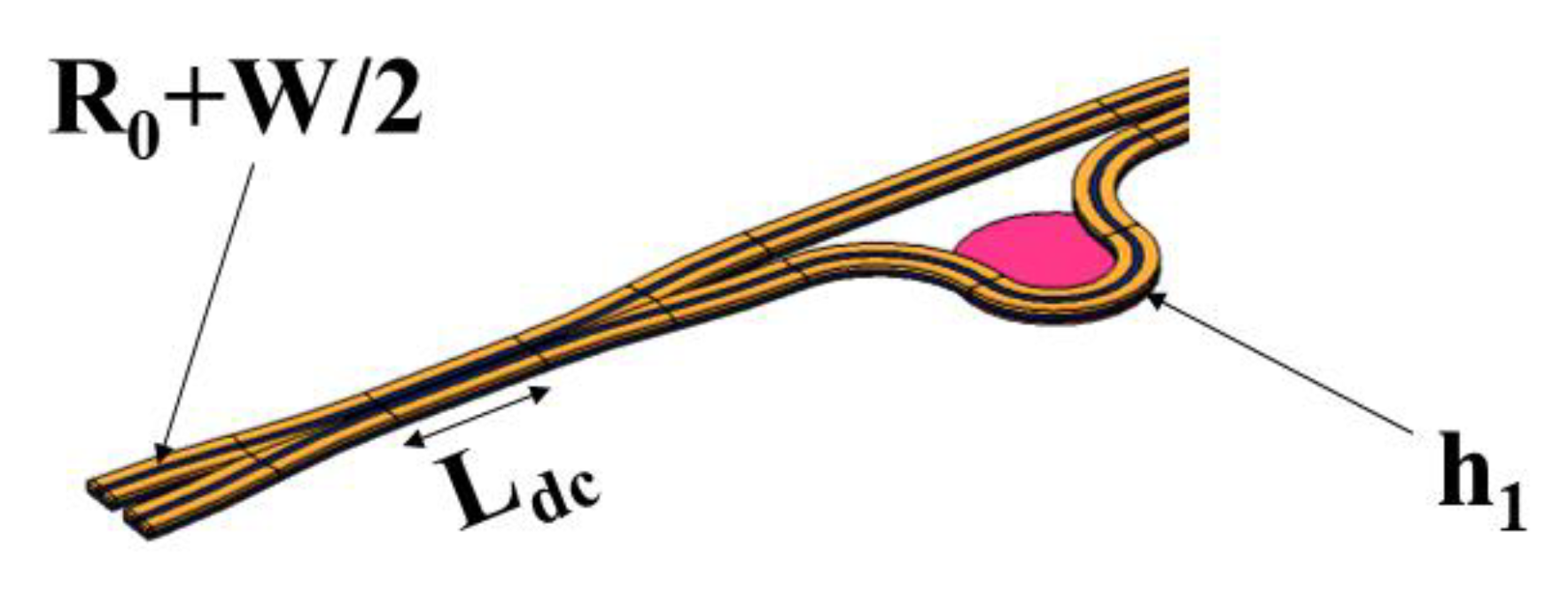
3.1. Design of a Ridge Optical Waveguide
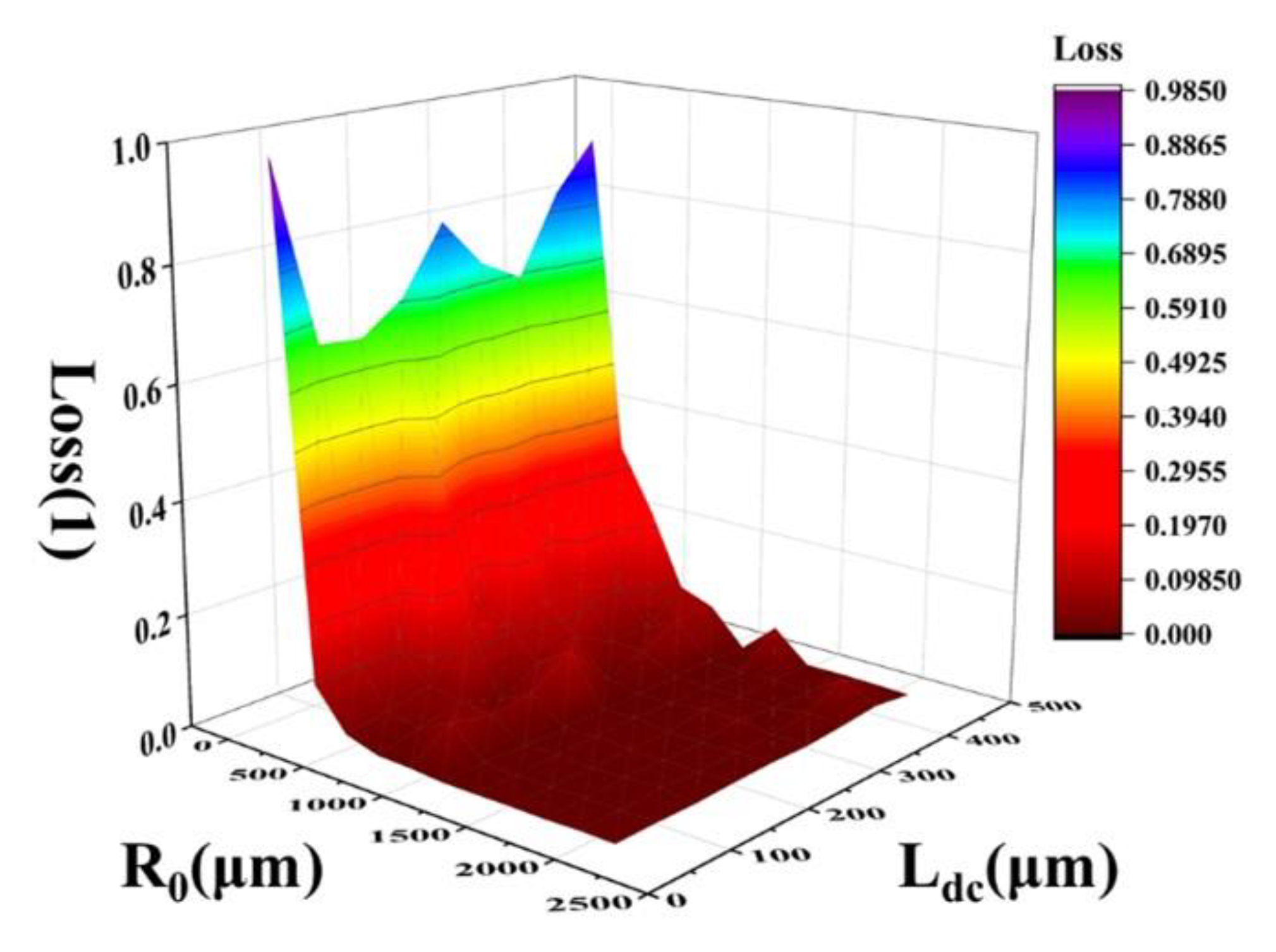
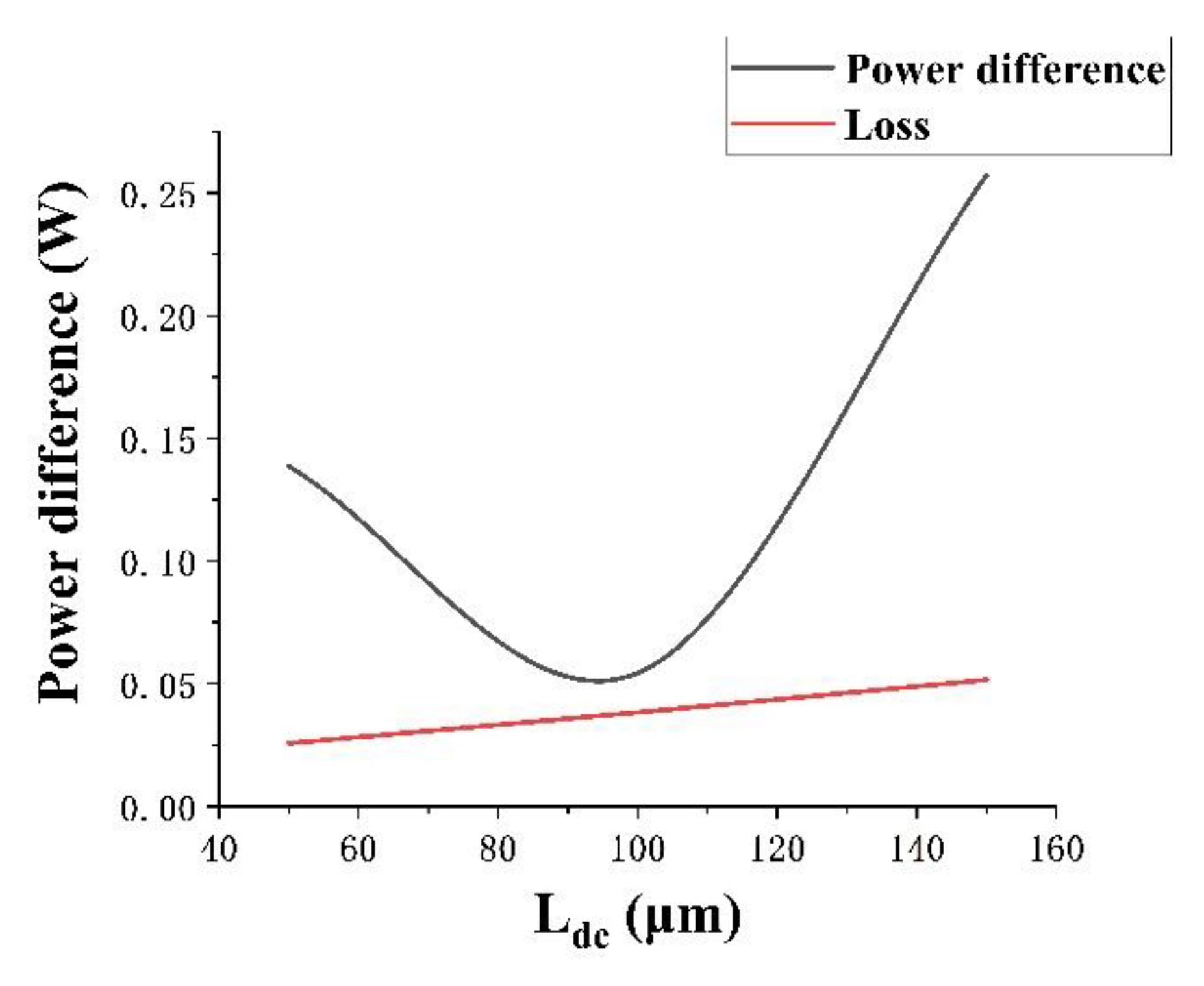
3.2. Optimization of a Ridge Optical Waveguide
4. Design of an Elastic Film for a Pressure Sensor
5. Performance Analysis of the Pressure Sensor
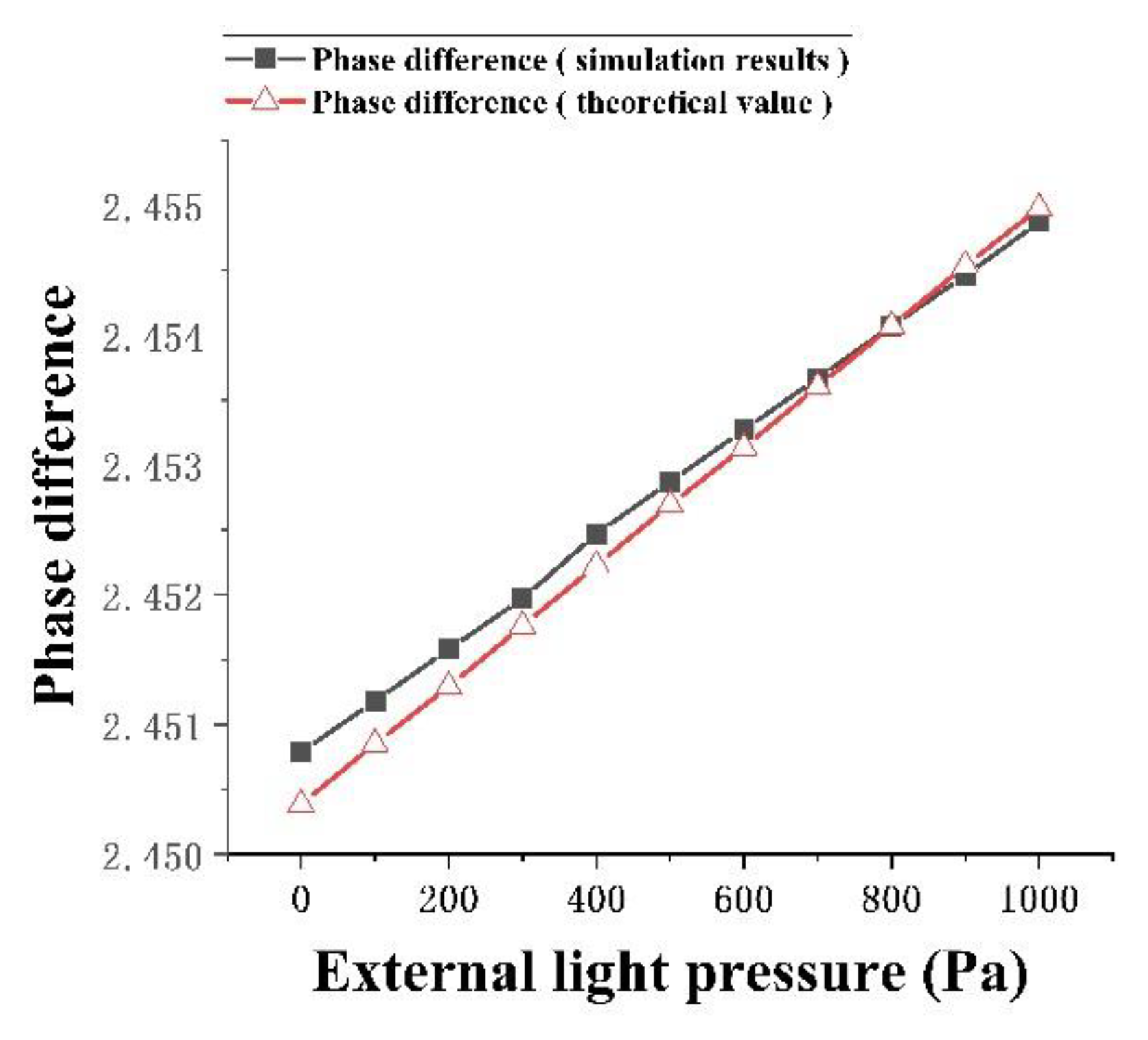
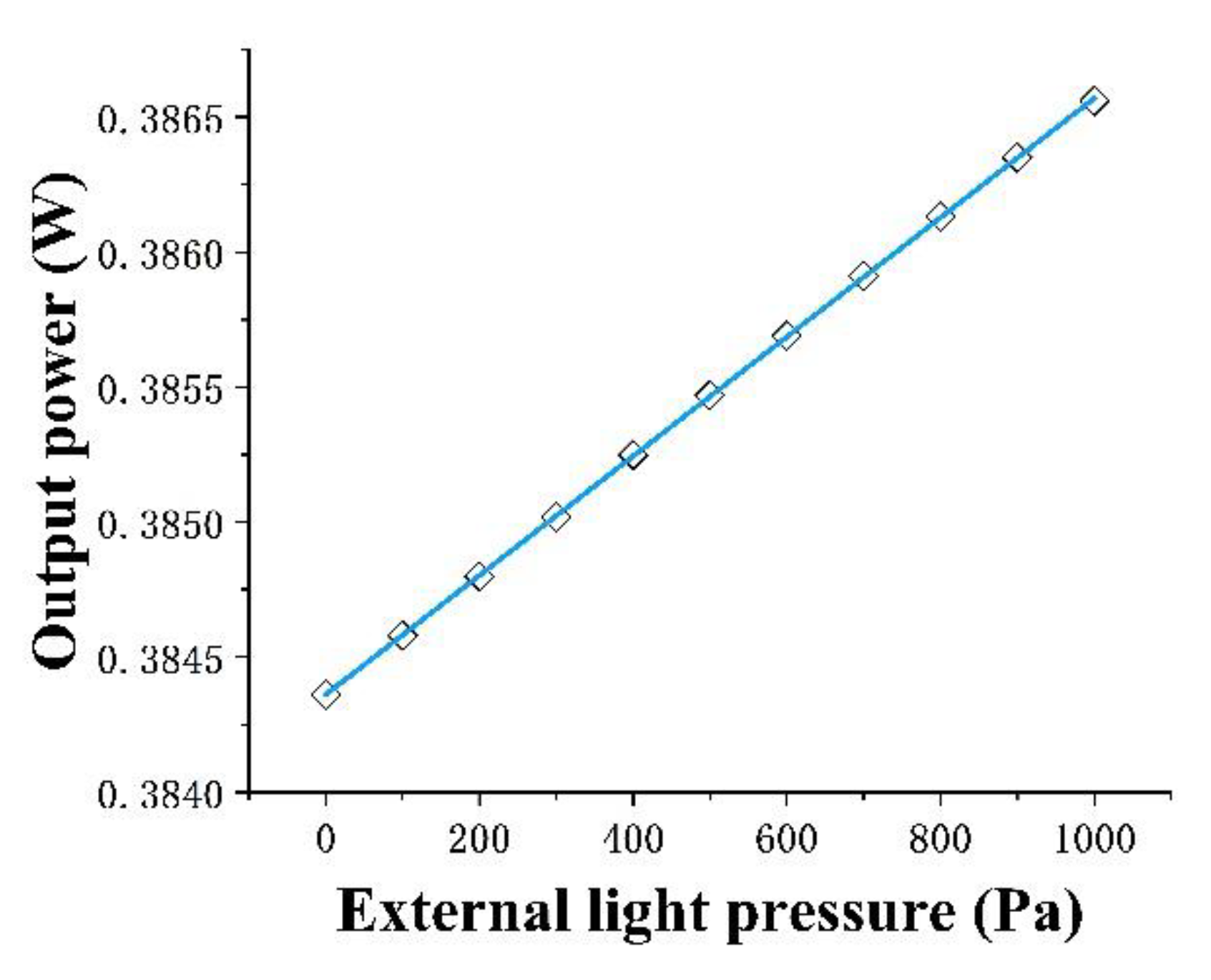
5.1. Pressure Sensor Sensitivity and Linearity Analysis
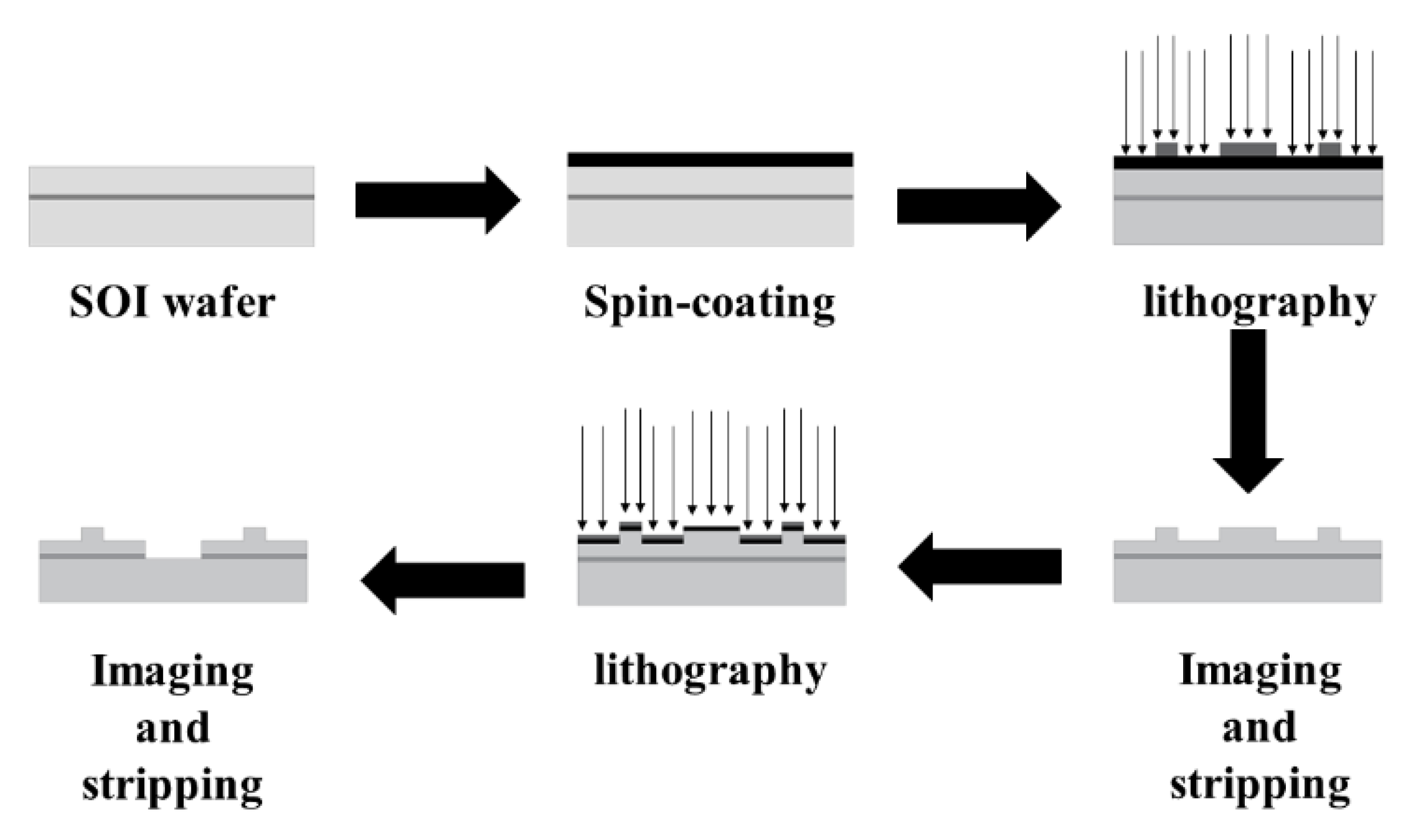
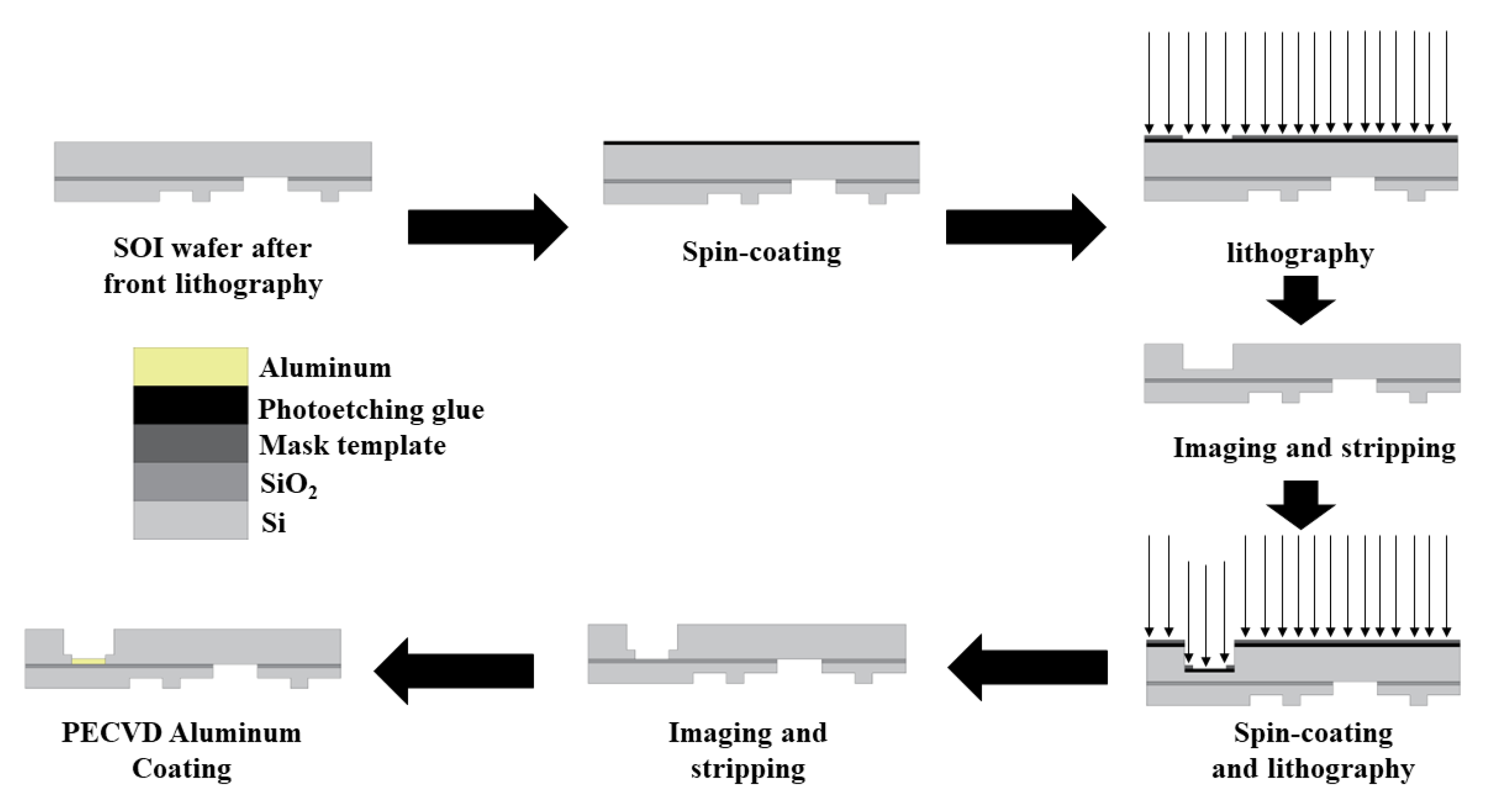
5.2. Technological Process of Pressure Sensor
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Maxwell, J.C. A Dynamical Theory of the Electromagnetic Field; Wipf and Stock Publishers: Eugene, OR, USA, 1996; pp. 92–94. [Google Scholar]
- Maxwell, J.C. A Treatise on Electricity and Magnetism; Oxford University Press: Oxford, UK, 1837; pp. 150–155. [Google Scholar]
- Berezanskaya, V.M.; Doskoch, I.Y.; Man’ko, M.A. Light-pressure experiments by PN Lebedev and modern problems of optomechanics and quantum optics. J. Russ. Laser Res. 2016, 37, 425–433. [Google Scholar] [CrossRef]
- Nesterov, V.; Mueller, M.; Frumin, L.L.; Brand, U. A new facility to realize a nanonewton force standard based on electrostatic methods. Metrologia 2009, 46, 277. [Google Scholar] [CrossRef]
- Nesterov, V. A nanonewton force facility and a novel method for measurements of the air and vacuum permittivity at zero frequencies. Meas. Sci. Technol. 2009, 20, 084012. [Google Scholar] [CrossRef]
- Nesterov, V. Facility and methods for the measurement of micro and nano forces in the range below 10−5 N with a resolution of 10−12 N (development concept). Meas. Sci. Technol. 2007, 18, 360. [Google Scholar] [CrossRef]
- Nesterov, V.; Buetefisch, S.; Koenders, L. A nanonewton force facility to test Newton’s law of gravity at micro- and submicrometer distances. Ann. Der Phys. 2013, 525, 728–737. [Google Scholar] [CrossRef]
- Petrov, M.P. The Casimir Force and Light Pressure. In Proceedings of the Photorefractive Effects, Photosensitivity, Fiber Gratings, Photonic Materials and More, Squaw Creek, CA, USA, 14–16 October 2007. [Google Scholar]
- Zhang, L.; She, W.; Peng, N.; Leonhardt, U. Experimental evidence for Abraham pressure of light. New J. Phys. 2015, 17, 053035. [Google Scholar] [CrossRef]
- Glenzer, S.H.; MacGowan, B.J.; Michel, P.; Meezan, N.B.; Suter, L.J.; Dixit, S.N.; Kline, J.L.; Kyrala, G.A.; Bradley, D.K.; Callahan, D.A.; et al. Symmetric inertial confinement fusion implosions at ultra-high laser energies. Science 2010, 327, 1228–1231. [Google Scholar] [CrossRef] [PubMed]
- She, W.; Yu, J.; Feng, R. Observation of a push force on the end face of a nanometer silica filament exerted by outgoing light. Phys. Rev. Lett. 2008, 101, 243601. [Google Scholar] [CrossRef] [PubMed]
- Lai, W.C.; Zhou, P. Review on recent research progress on laser power measurement based on light pressure. In Proceedings of the Young Scientists Forum, Jerualem, Israel, 7–10 September 2017; SPIE: Bellingham, WA, USA, 2018; Volume 10710, pp. 1029–1036. [Google Scholar]
- Chandrika, T.; Archana, K.; Talabattula, S.; Gopalkrishna, H. Mathematical modeling of optical MEMS differential pressure sensor using waveguide Bragg gratings embedded in Mach Zehnder interferometer. J. Opt. 2018, 20, 085802. [Google Scholar]
- Fayek, R. Adaptive MOEMS applications in telemetry and multi-spectral imaging. In Proceedings of the Conference on Microelectronics, Cairo, Egypt, 29–31 December 2007; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Mitrakos, V.; MacIntyre, L.; Denison, F.C.; Hands, P.J.; Desmulliez, M.P.Y. Design, manufacture and testing of capacitive pressure sensors for low-pressure measurement ranges. Micromachines 2017, 8, 41. [Google Scholar] [CrossRef]
- Endo, Y.; Dohi, T. The blood pressure measurement device with convex micro sensor array for reducing a cross talk. In Proceedings of the 2015 Transducers-2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; IEEE: Piscataway, NJ, USA; pp. 1719–1722. [Google Scholar]
- Nie, M.; Xia, Y.H.; Guo, A.Q. Design and simulation analysis of a novel pressure sensor based on graphene film. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Hong Kong, China, 23–24 November 2017; IOP Publishing: Bristol, UK, 2018; Volume 307, p. 012004. [Google Scholar]
- Akbar, G.; Reza, A. Pressure sensor based on polarization rotation in z-cut LiNbO3 optical waveguide. Sens. Actuators A Phys. 2018, 280, 521–524. [Google Scholar]
- Abeysinghe, D.C.; Dasgupta, S.; Boyd, J.T.; Jackson, H.E. A novel MEMS pressure sensor fabricated on an optical fiber. IEEE Photonics Technol. Lett. 2001, 13, 993–995. [Google Scholar] [CrossRef]
- Rochus, V.; Jansen, R.; Goyvaerts, J.; Vandenboch, G.; van de Voort, B.; Neutens, P.; Callaghan, J.O.; Tilmans, H.A.C.; Rottenberg, X. Design of a MZI Micro-Opto-Mechanical Pressure Sensor for a SiN photonics platform. In Proceedings of the International Conference on Thermal, Montpellier, France, 18–20 April 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Pavesi, L.; Lockwood, D.J. Silicon photonics III. Topics in Applied Physics; Springer: Berlin/Heidelberg, Germany, 2016; Volume 122, pp. 1–36. [Google Scholar]
- Petermann, K. Properties of Optical Rib-Guide with Large Cross-Section; Pascal-Francis: Lawrence, NY, USA, 1976. [Google Scholar]
- Soref, R.A.; Schmidtchen, J.; Petermann, K. Large single-mode rib waveguides in GeSi-Si and Si-on-SiO2. IEEE J. Quantum Electron. 1991, 27, 1971–1974. [Google Scholar] [CrossRef]
- Dai, D.; He, S. Analysis of the birefringence of a silicon-on-insulator rib waveguide. Appl. Opt. 2004, 43, 1156. [Google Scholar] [CrossRef] [PubMed]
- Sailing, H. Micro-Nano Photon Integration; Science Press: Beijing, China, 2010; pp. 46–47. [Google Scholar]
- Masashi, O.; Masayuki, I.; Sueta, T. Integrated optic pressure sensor on silicon substrate. Appl. Opt. 1989, 28, 5153–5157. [Google Scholar]
- Požar, T.; Laloš, J.; Babnik, A.; Petkovšek, R.; Bethune-Waddell, M.; Chau, K.J.; Lukasievicz, G.V.B.; Astrath, N.G.C. Isolated detection of elastic waves driven by the momentum of light. Nat. Commun. 2018, 9, 3340. [Google Scholar] [CrossRef] [PubMed]
- Rakić, A.D. Algorithm for the determination of intrinsic optical constants of metal films: Application to aluminum. Appl. Opt. 1995, 34, 4755–4767. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Li, Y.; Li, X. Intensity-modulated refractive index sensor based on the side modes of fiber Bragg grating. Opt. Commun. 2022, 505, 127319. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Unit |
|---|---|---|
| Coefficient constant (c1) | 0.3 | None |
| Ridge width (W) | 5 | μm |
| Ridge height (H) | 2 | μm |
| Outer ridge height (h) | 1.5 | μm |
| Refractive index of cladding (n1) | 1.445 | None |
| Refractive index of core (n2) | 3.445 | None |
| Refractive index of insulating layer (n3) | 1.445 | None |
| Item | Value | Unit |
|---|---|---|
| Optical input power (I) | 200 | GW/m2 |
| Design range (p1) | 1000 | Pa |
| Poisson ratio (v) | 0.33 | None |
| Item | Value | Unit |
|---|---|---|
| Length of sensing arm (L0) | 3.93 × 10−4 | m |
| Length difference between the two arms (const) | 1.43 × 10−4 | m |
| Effective mode refractive index in simulation (neff) | 3.4398 | None |
| Wave length (λ0) | 1550 | nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Zhang, C.; Yang, L.; Guo, F. Silicon-on-Insulator Optical Waveguide Pressure Sensor Based on Mach-Zehnder Interferometer. Micromachines 2022, 13, 1321. https://doi.org/10.3390/mi13081321
Li C, Zhang C, Yang L, Guo F. Silicon-on-Insulator Optical Waveguide Pressure Sensor Based on Mach-Zehnder Interferometer. Micromachines. 2022; 13(8):1321. https://doi.org/10.3390/mi13081321
Chicago/Turabian StyleLi, Chen, Chi Zhang, Lijun Yang, and Fangtong Guo. 2022. "Silicon-on-Insulator Optical Waveguide Pressure Sensor Based on Mach-Zehnder Interferometer" Micromachines 13, no. 8: 1321. https://doi.org/10.3390/mi13081321