
Adaptive Non-Singular Terminal Sliding Mode Control Method for Electromagnetic Linear Actuator


Abstract
:1. Introduction
2. Principle and Modeling of the EMLA
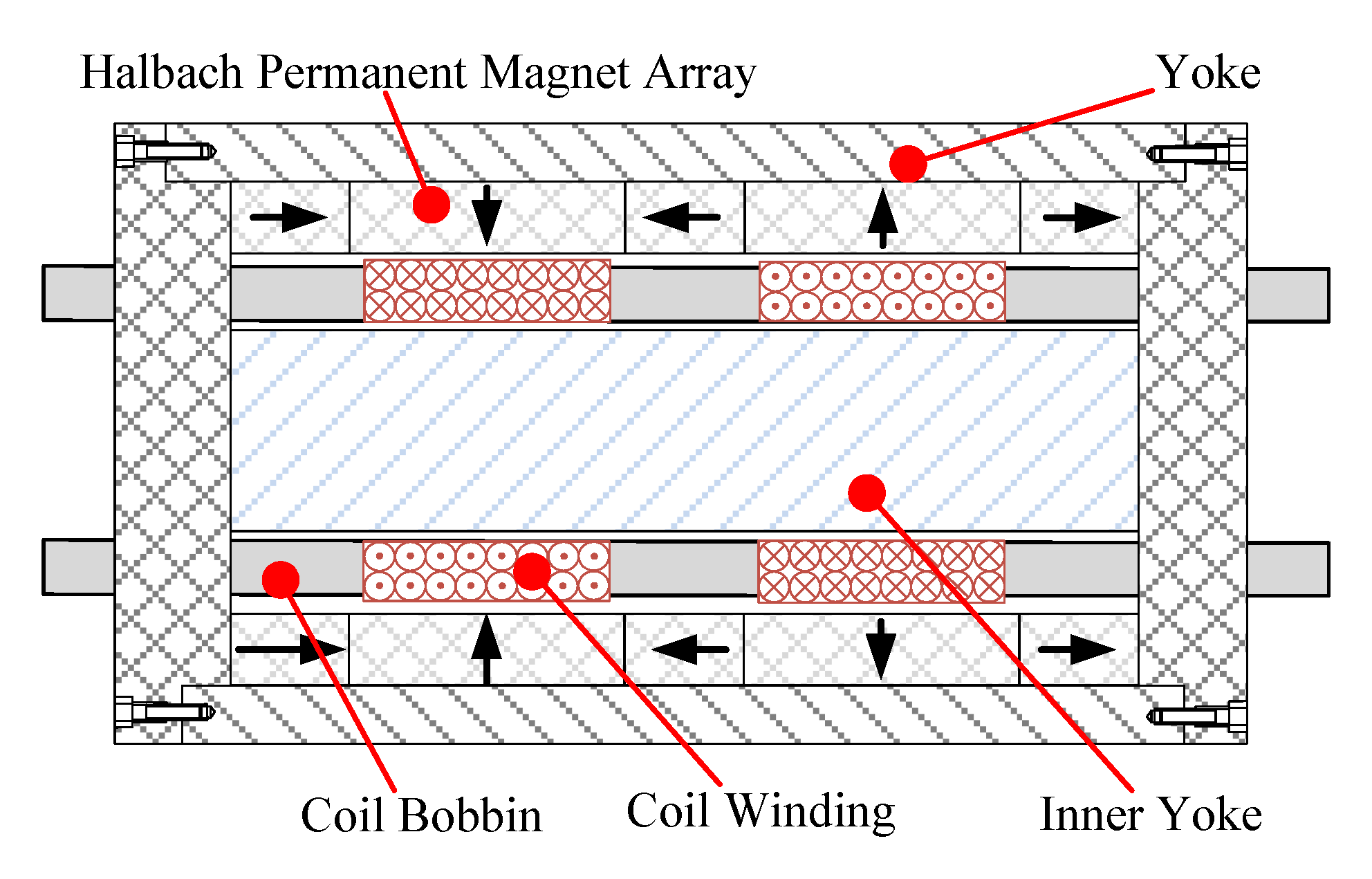
2.1. The Operating Principle of the EMLA
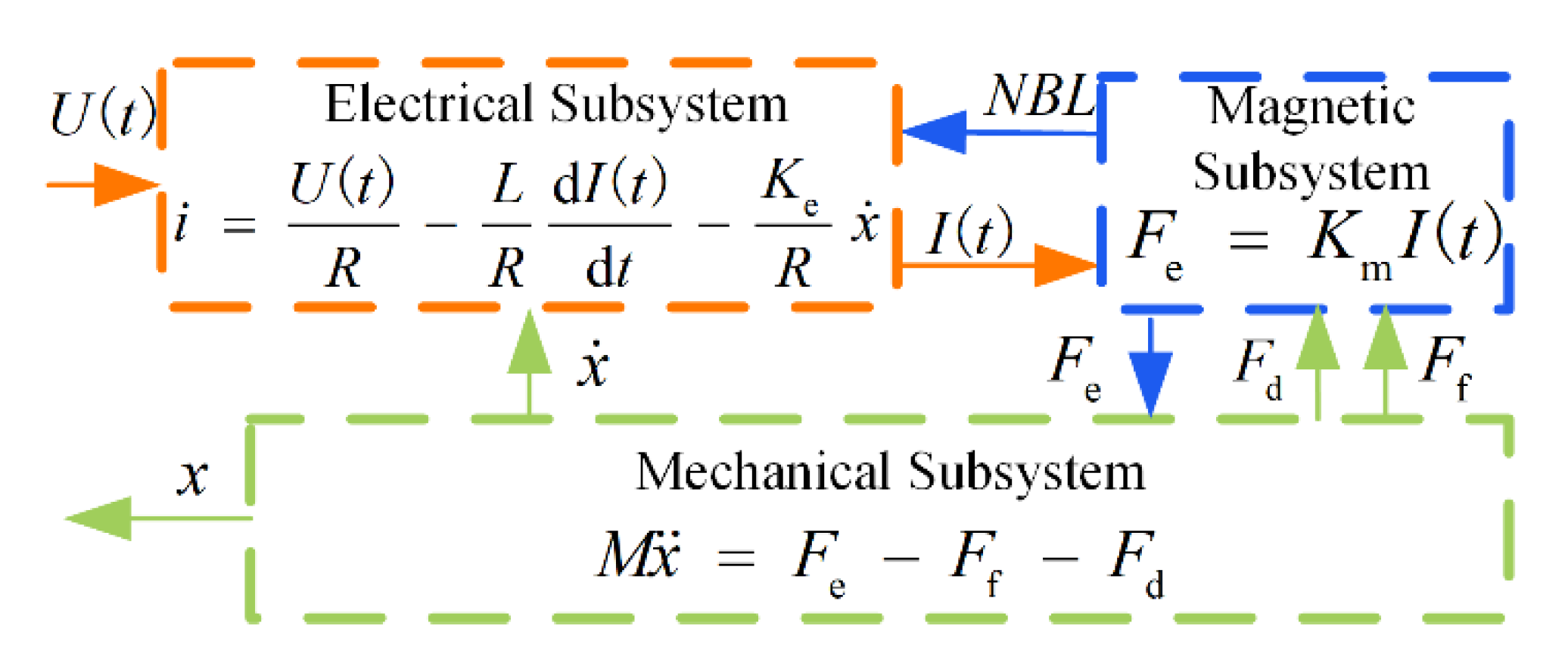
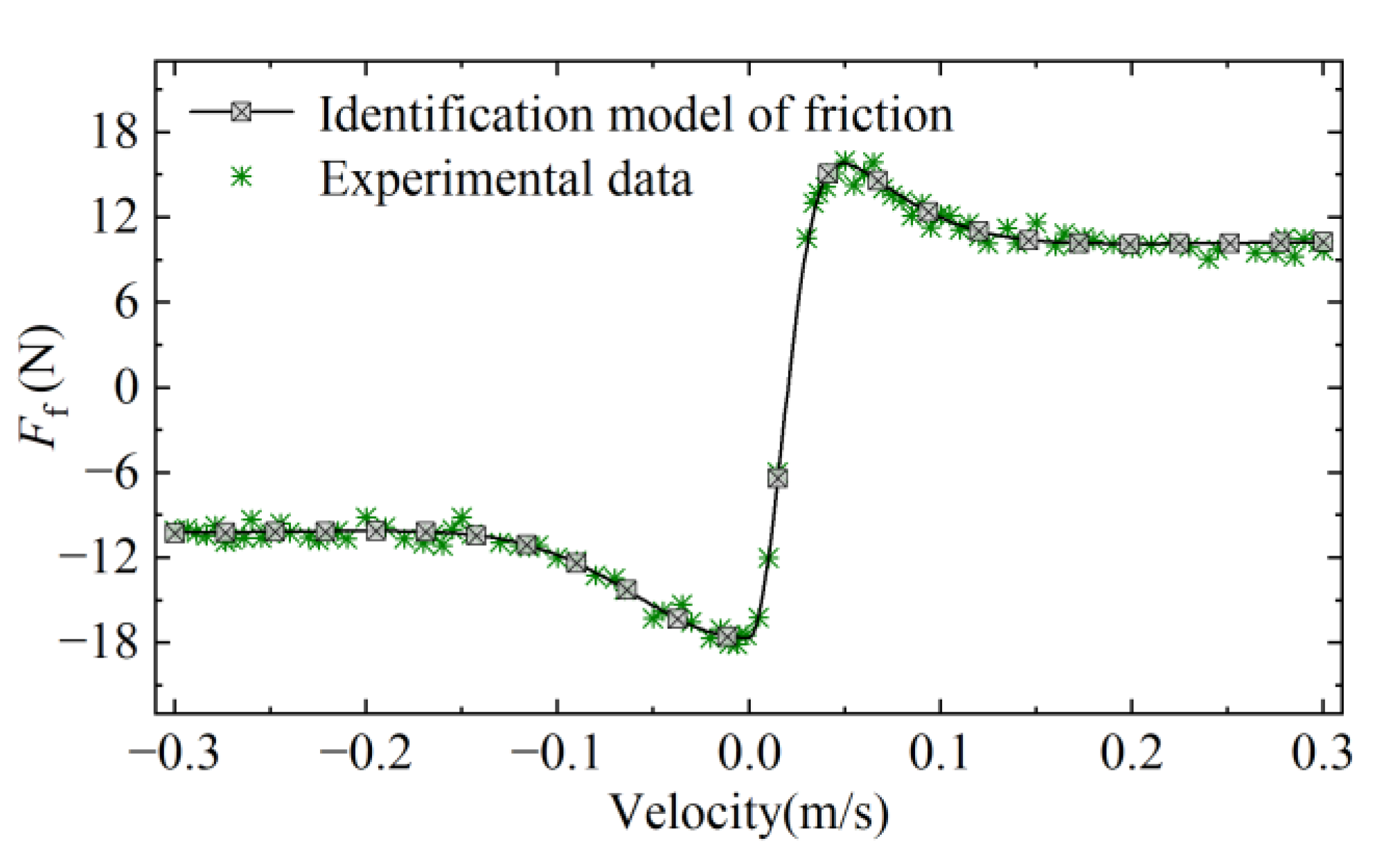
2.2. Mathematical Modeling of EMLA
3. Design and Analysis of Control Method
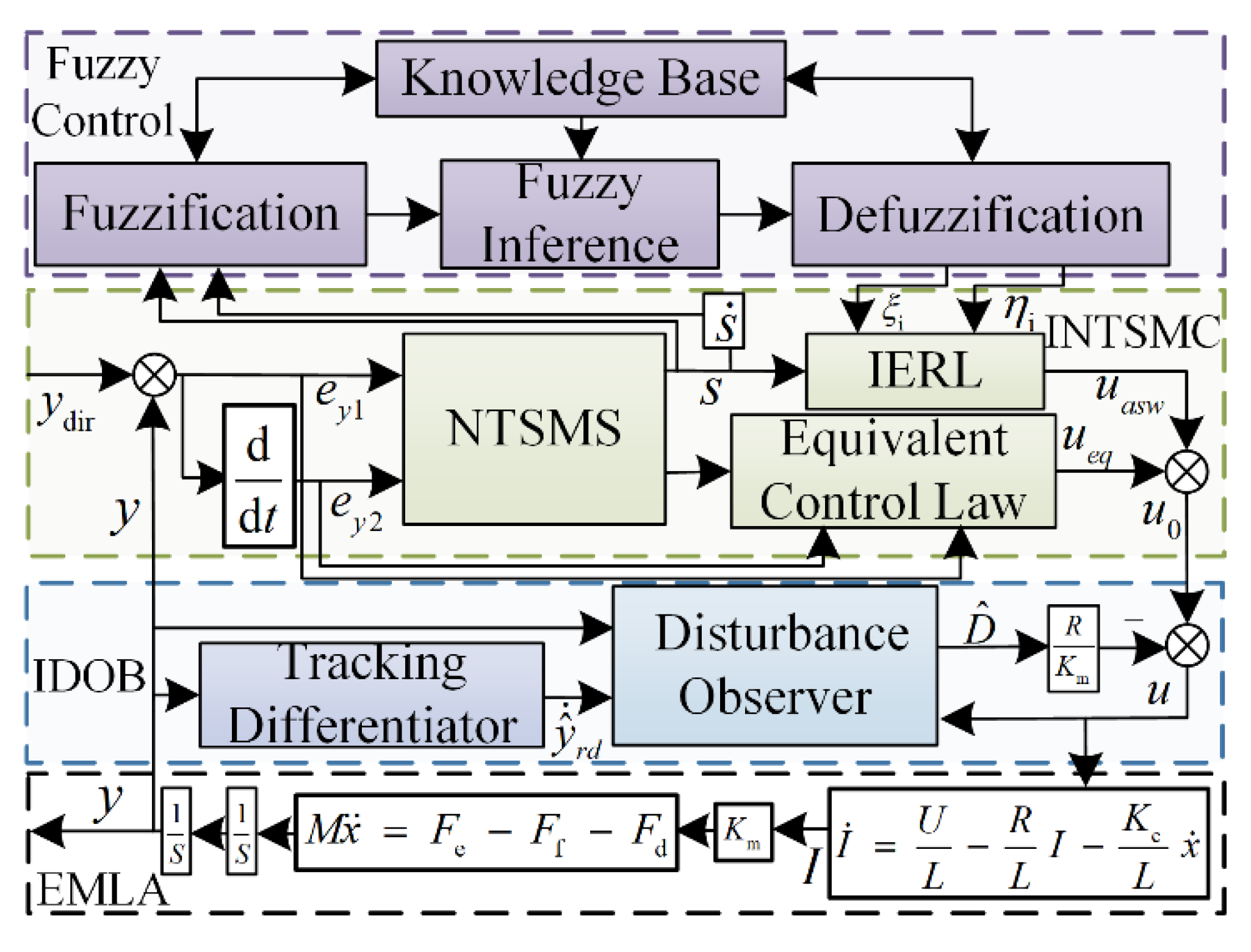
3.1. Overall Control Method
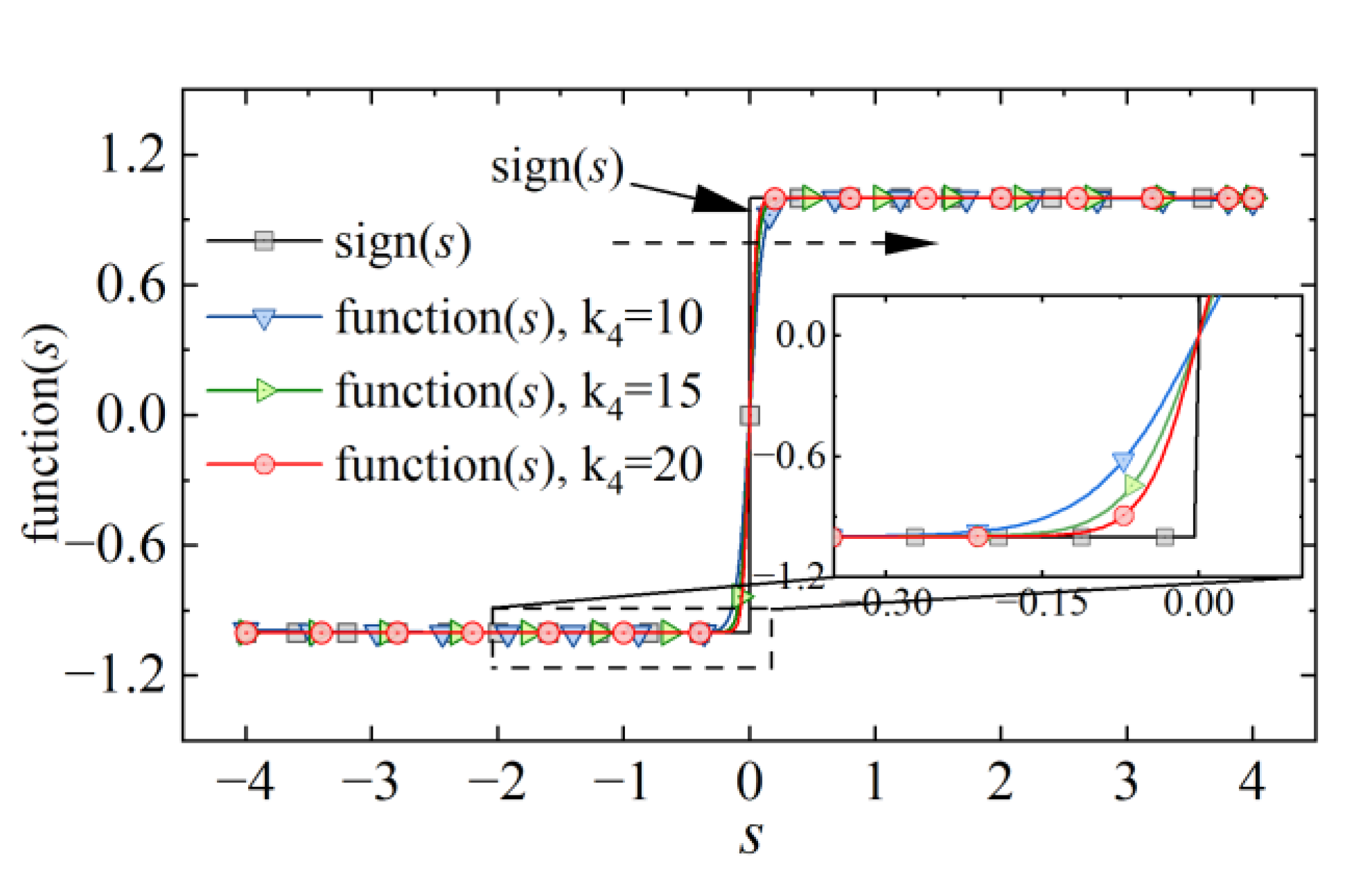
3.2. Design and Analysis of Improved Non-Singular Terminal Sliding Mode Control
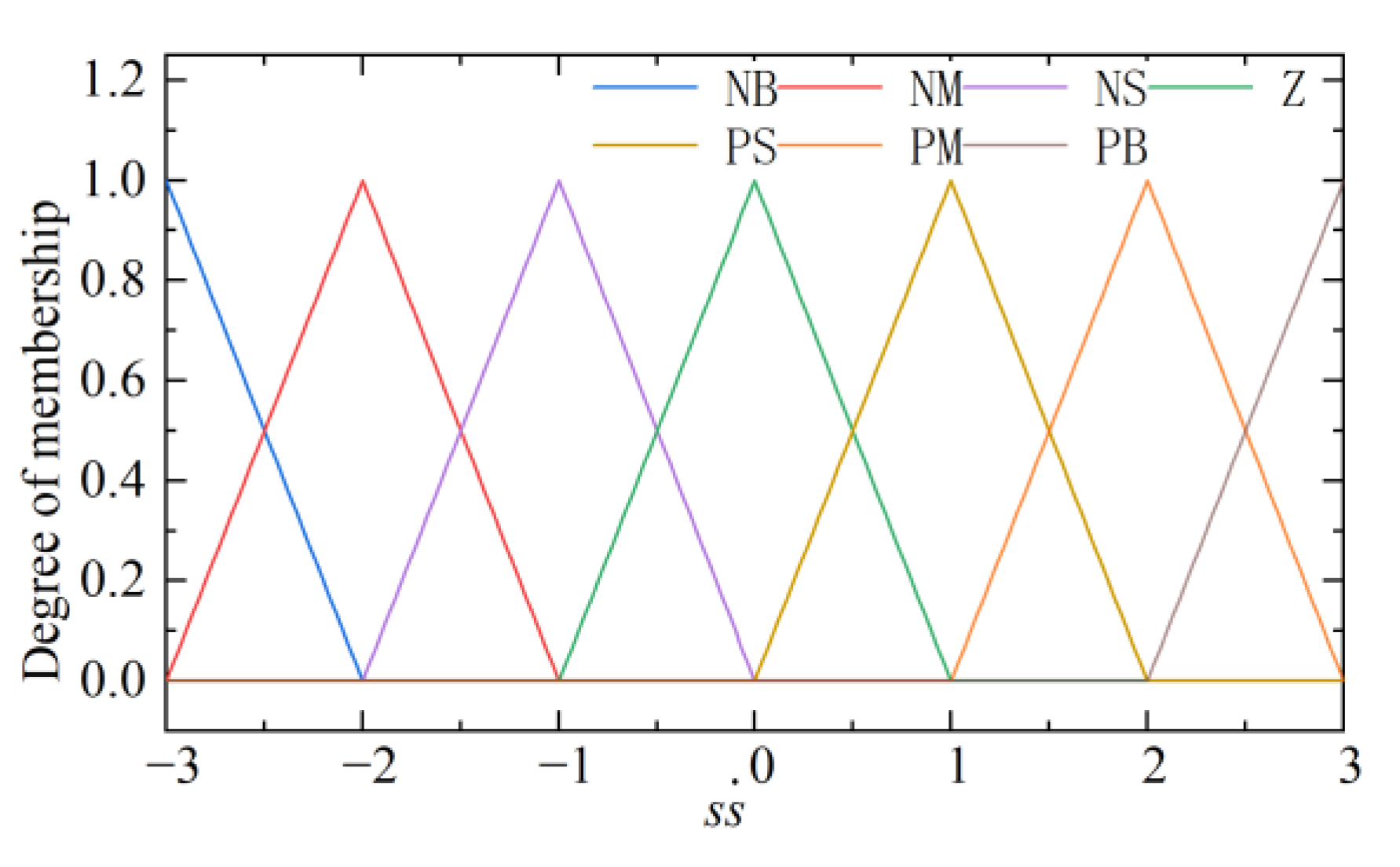
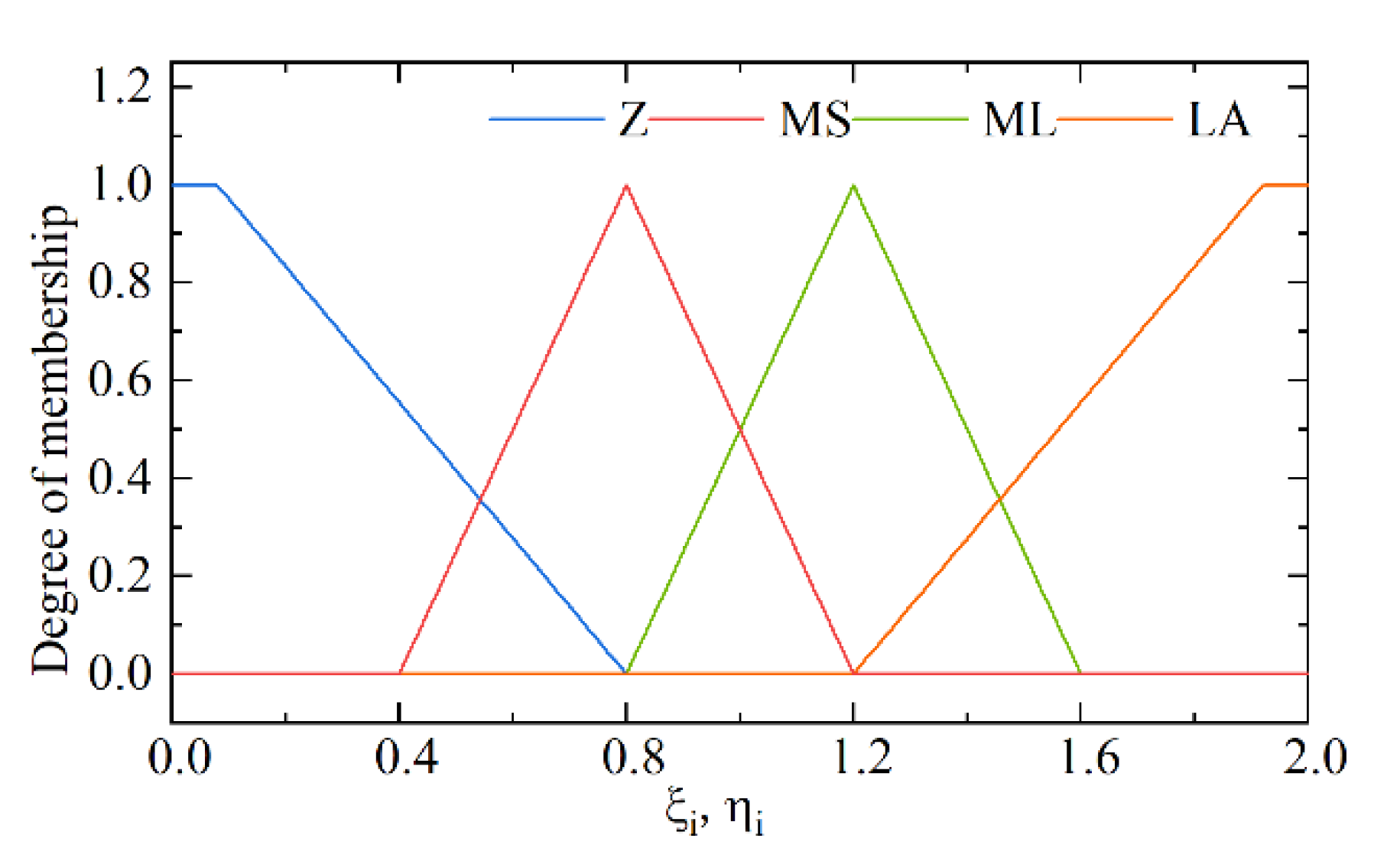
3.3. Adaptive Non-Singular Terminal Sliding Mode Control
3.4. Design and Analysis of Disturbance Observer
4. Experimental Verification and Analysis
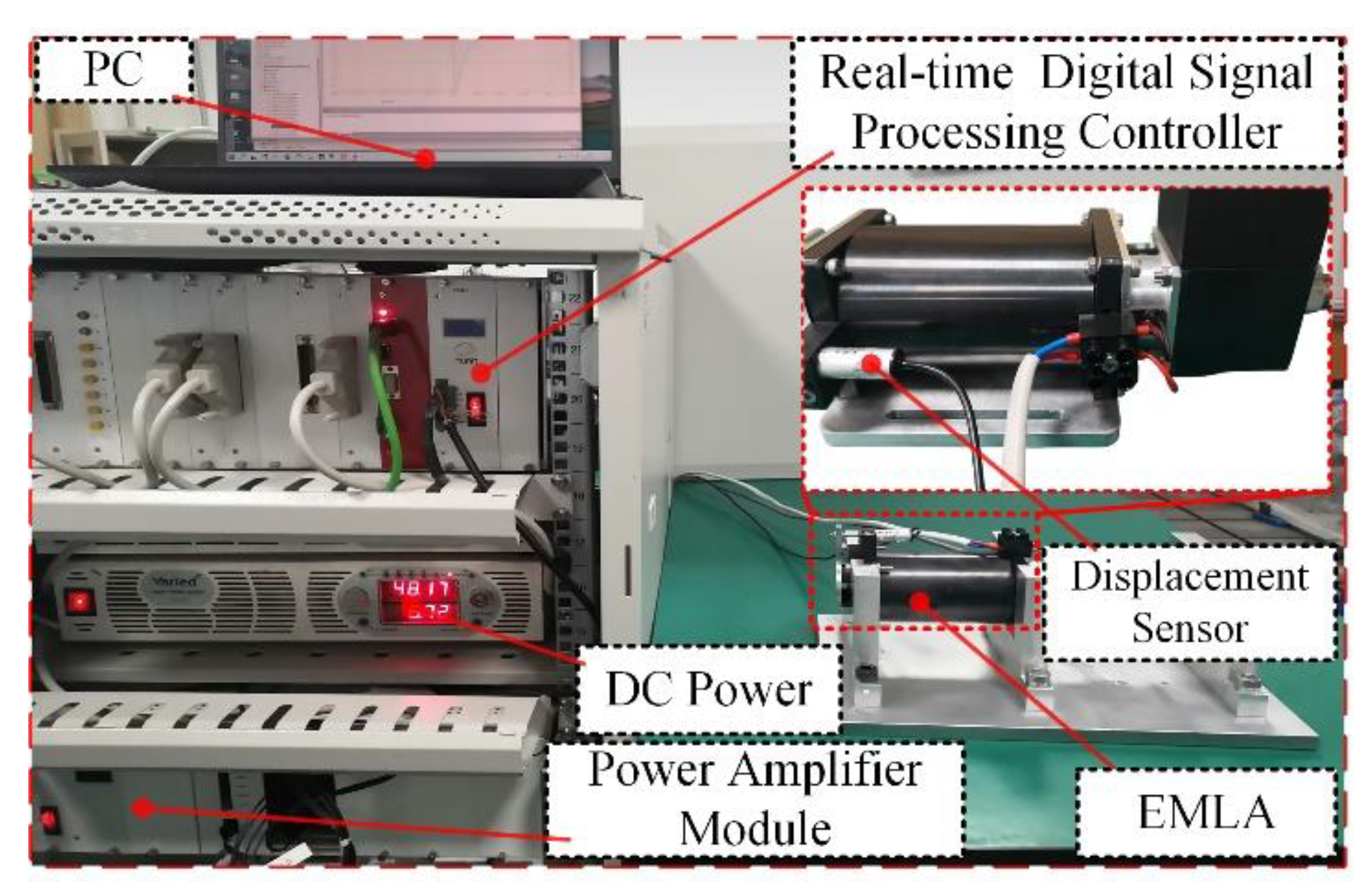
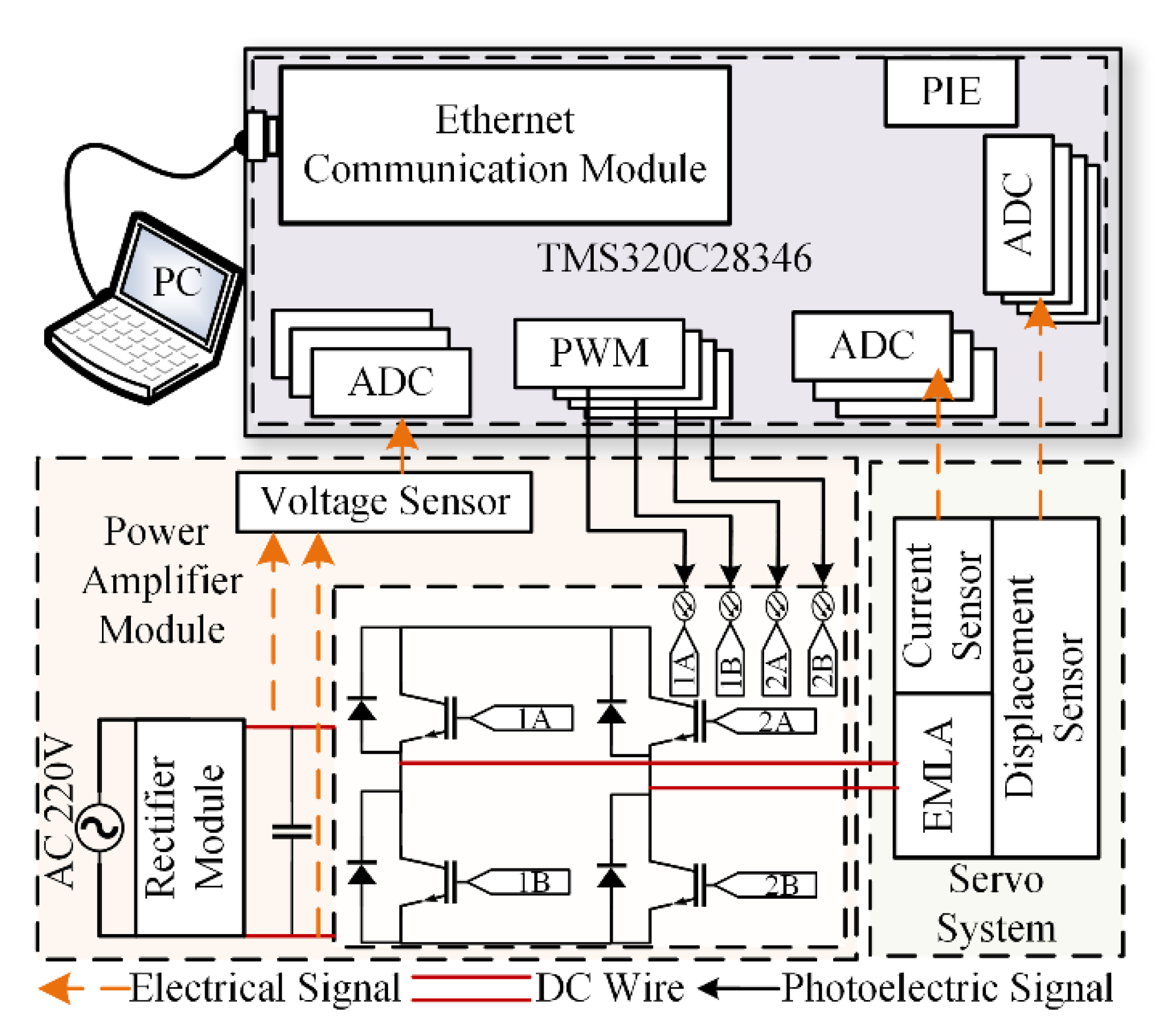
4.1. Experimental Equipment
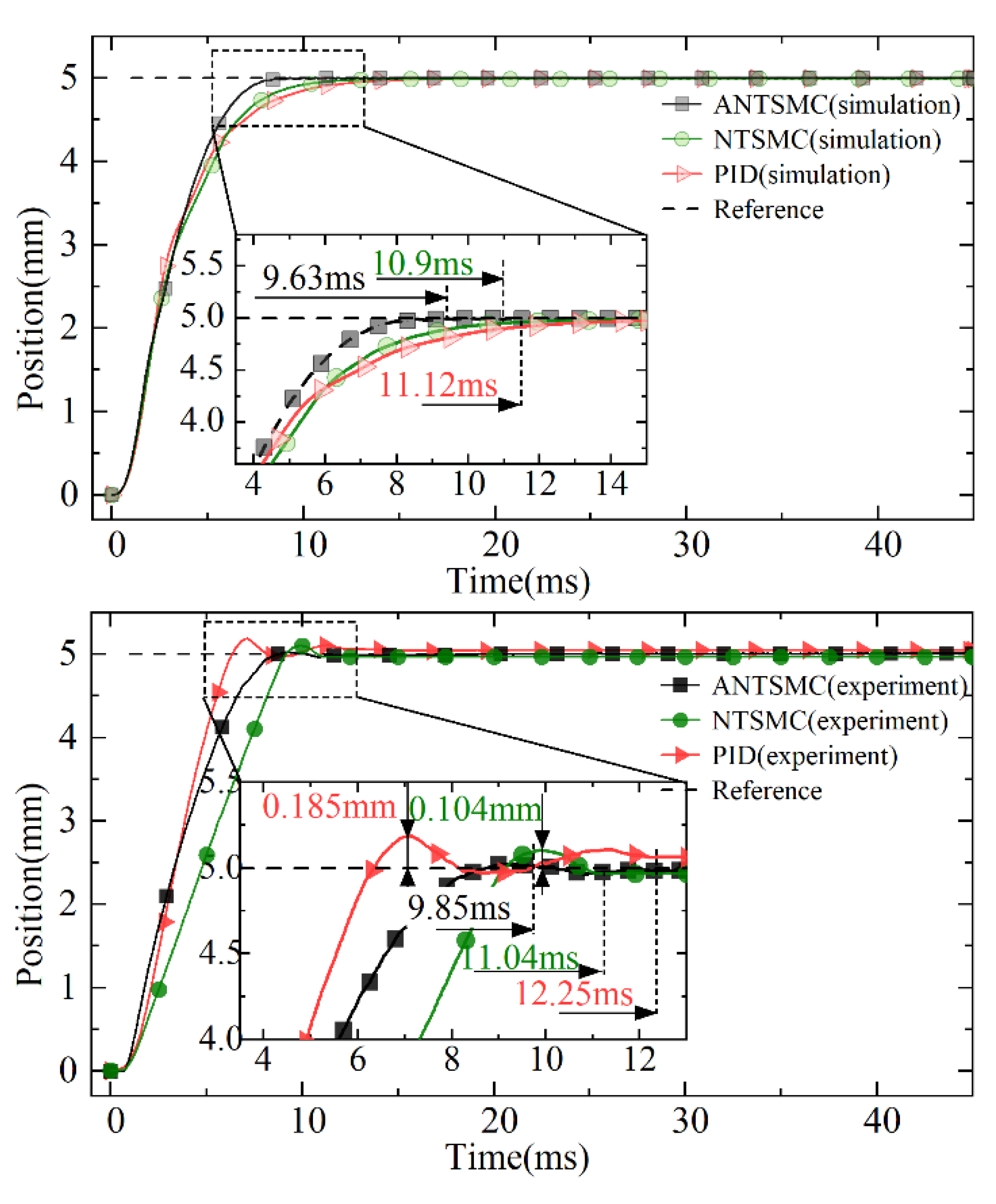
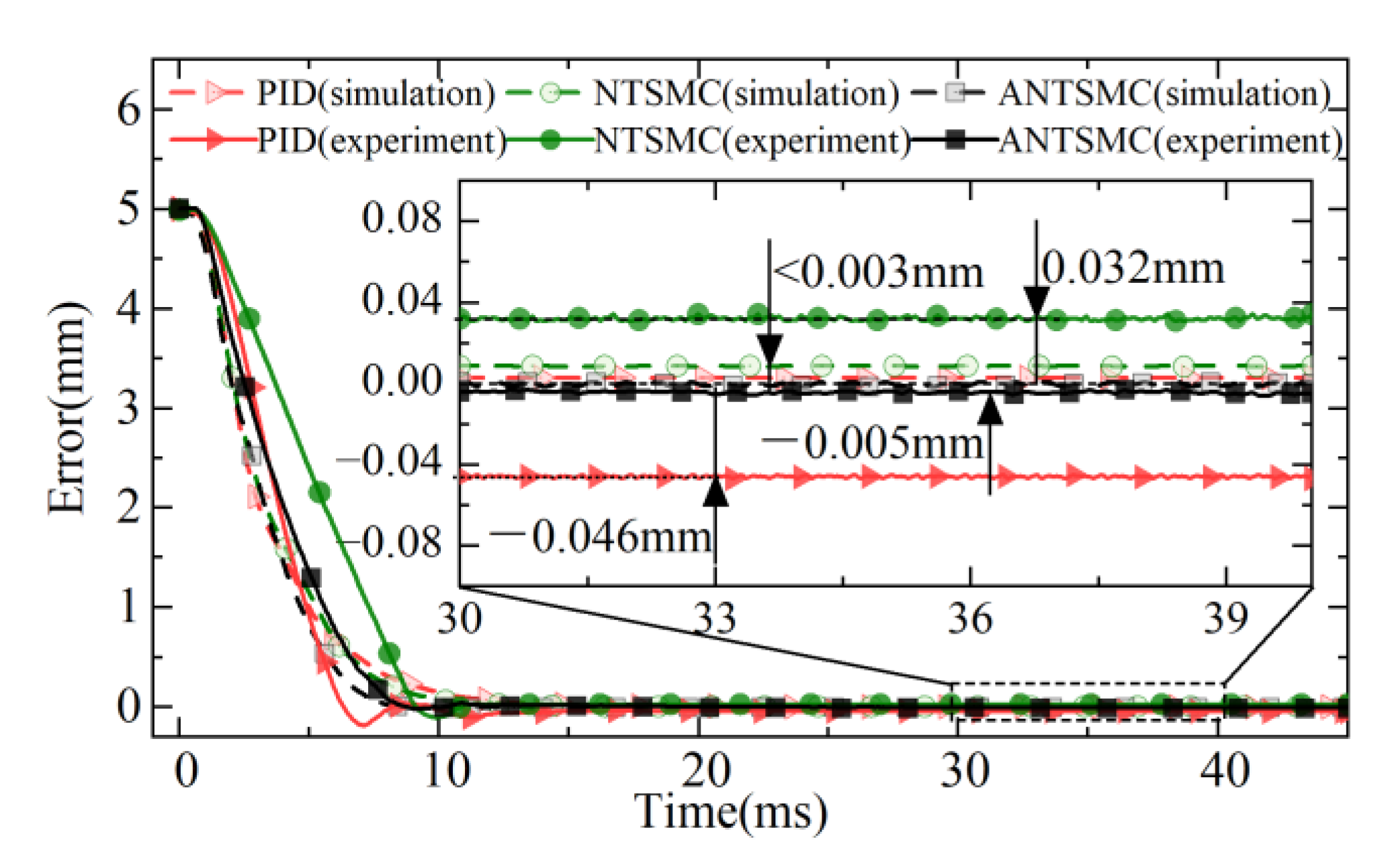
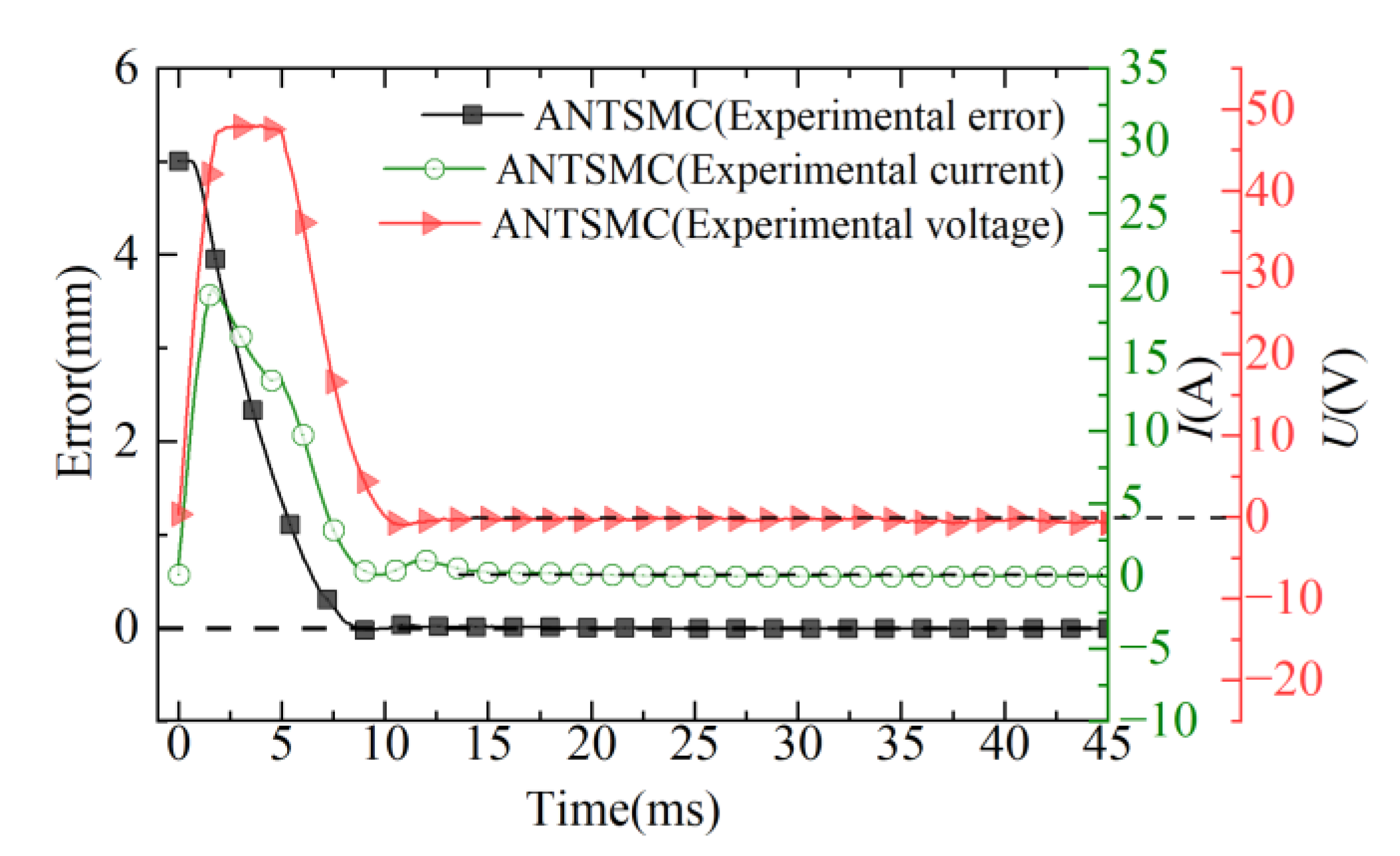
4.2. Analysis of Step Target Results
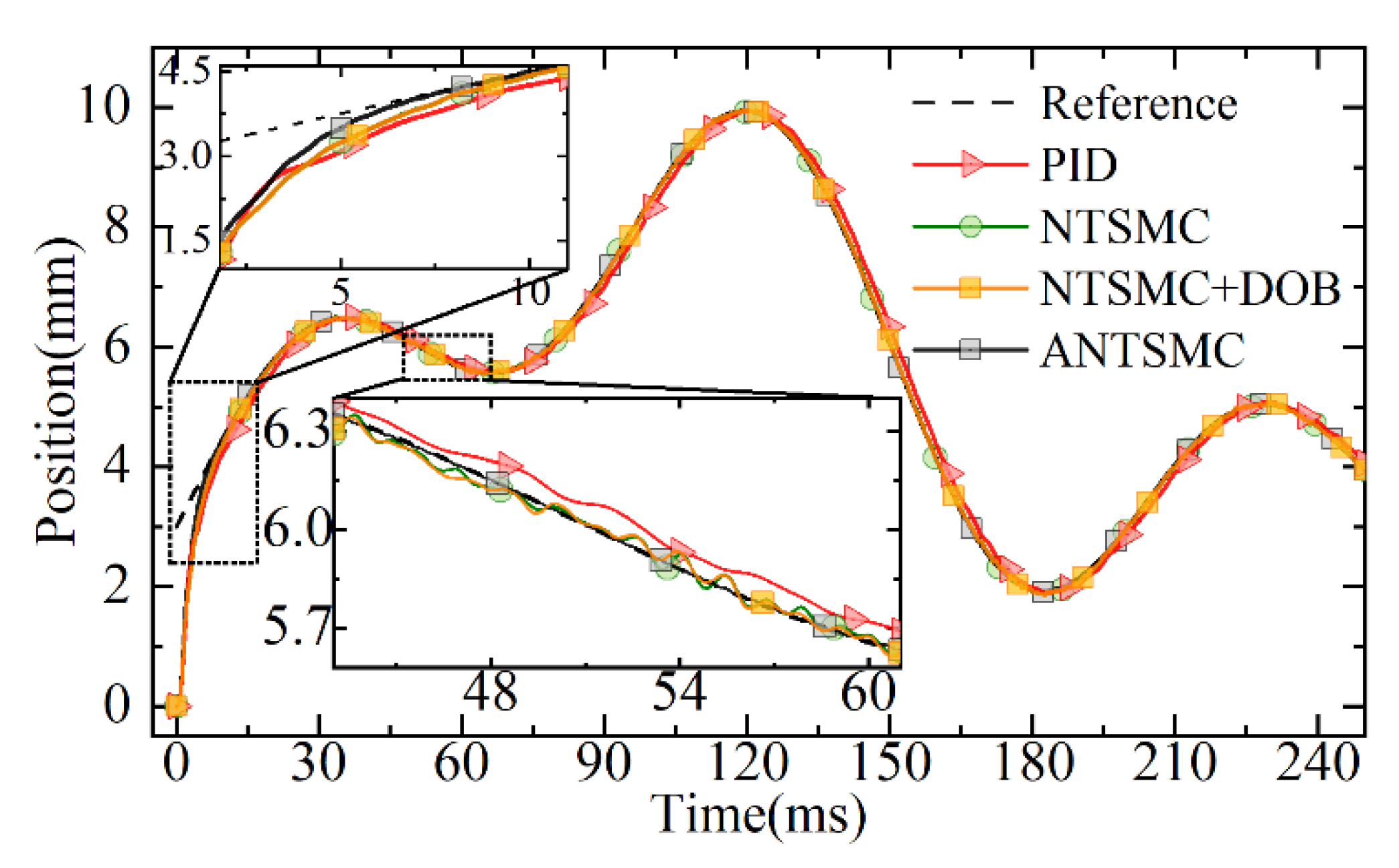
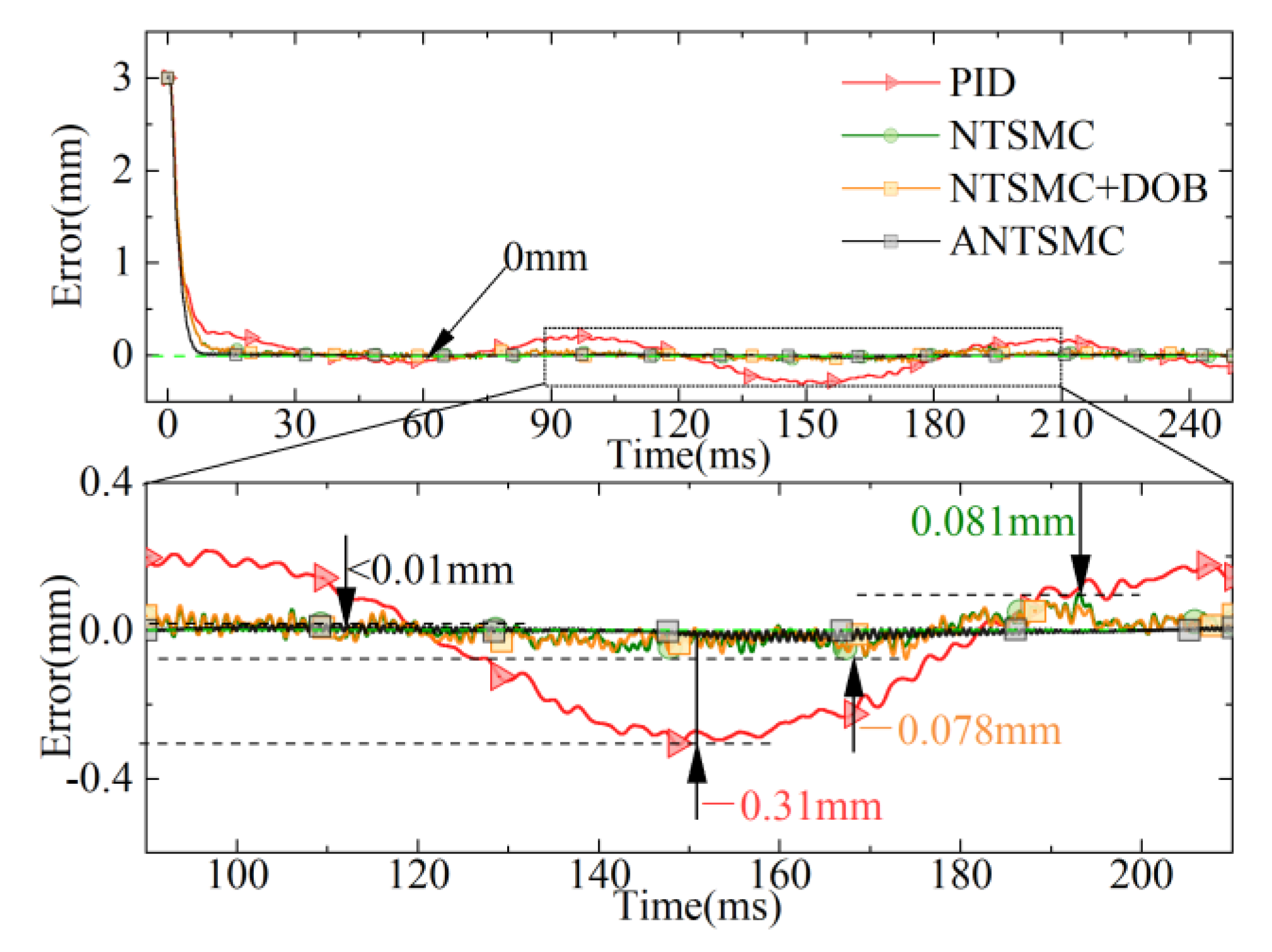
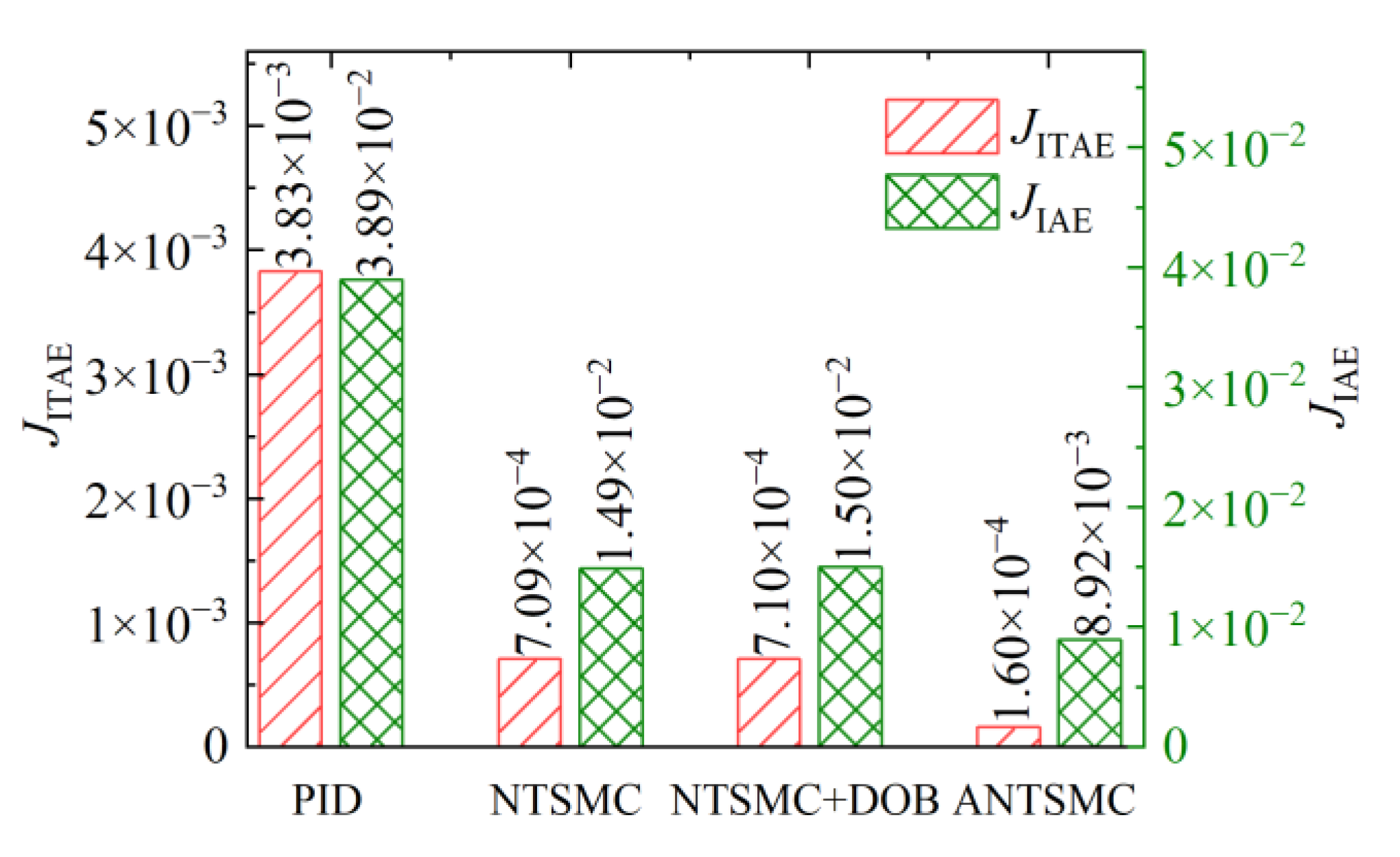
4.3. Analysis of Non-Repetitive Target Displacement Following
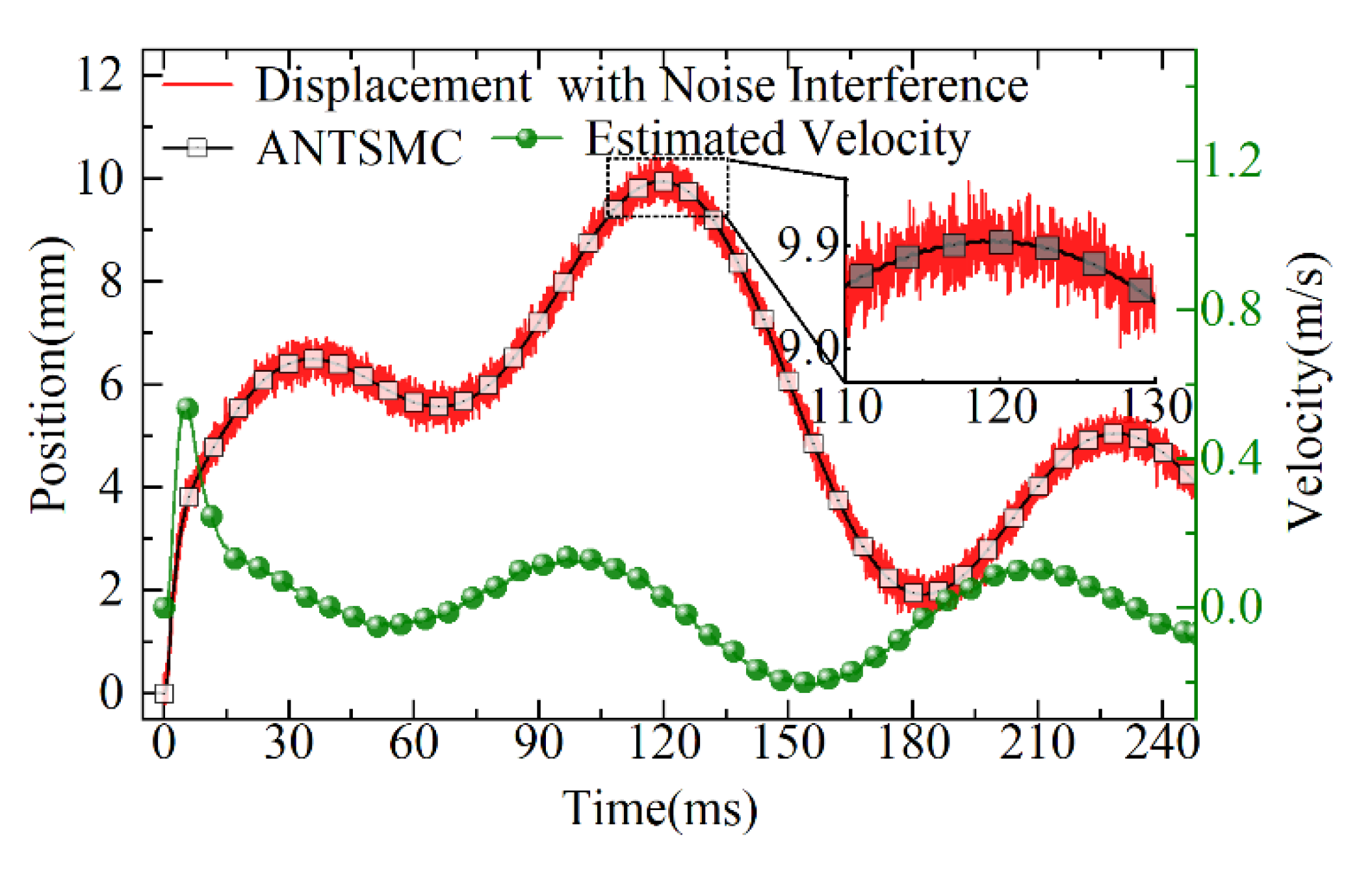
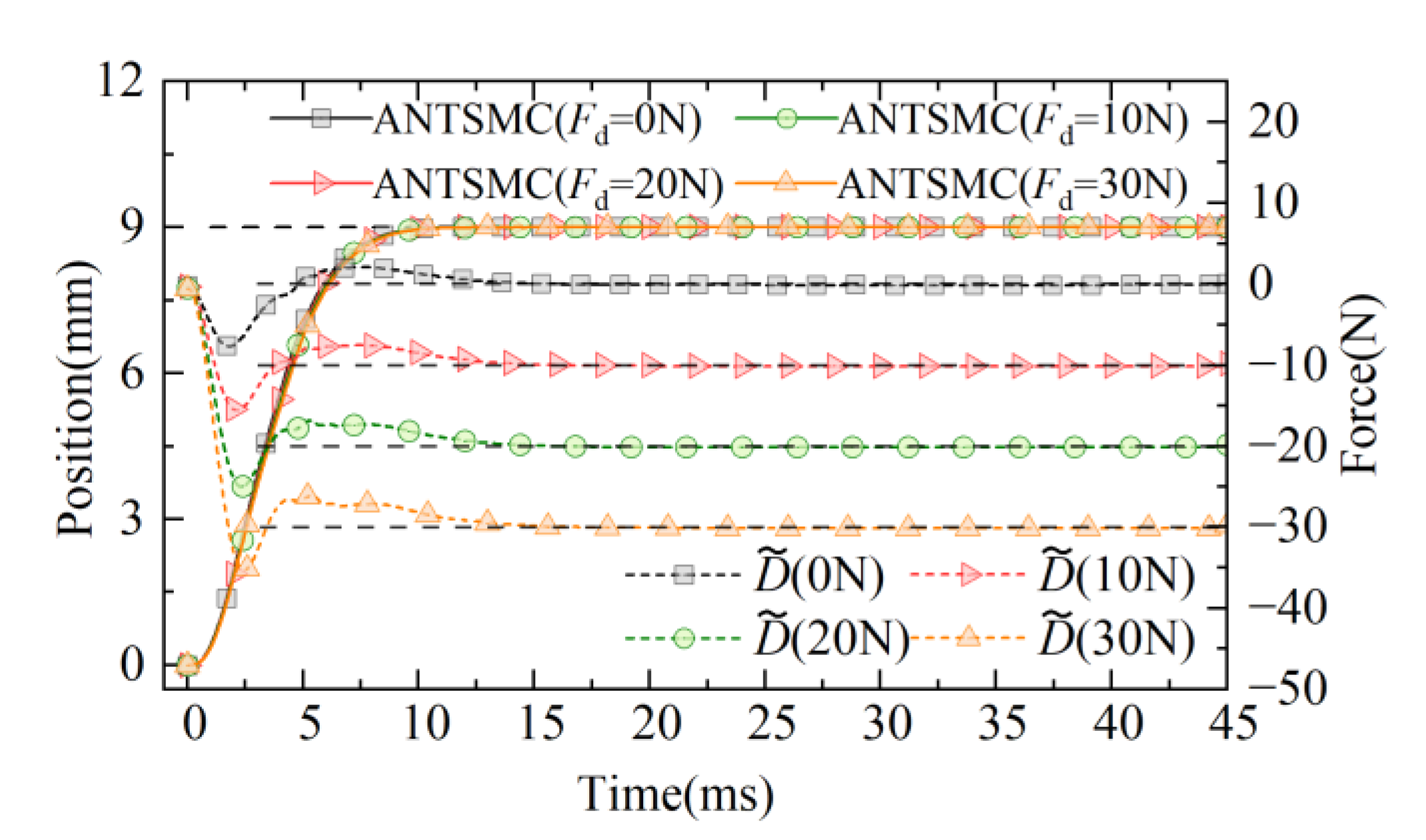
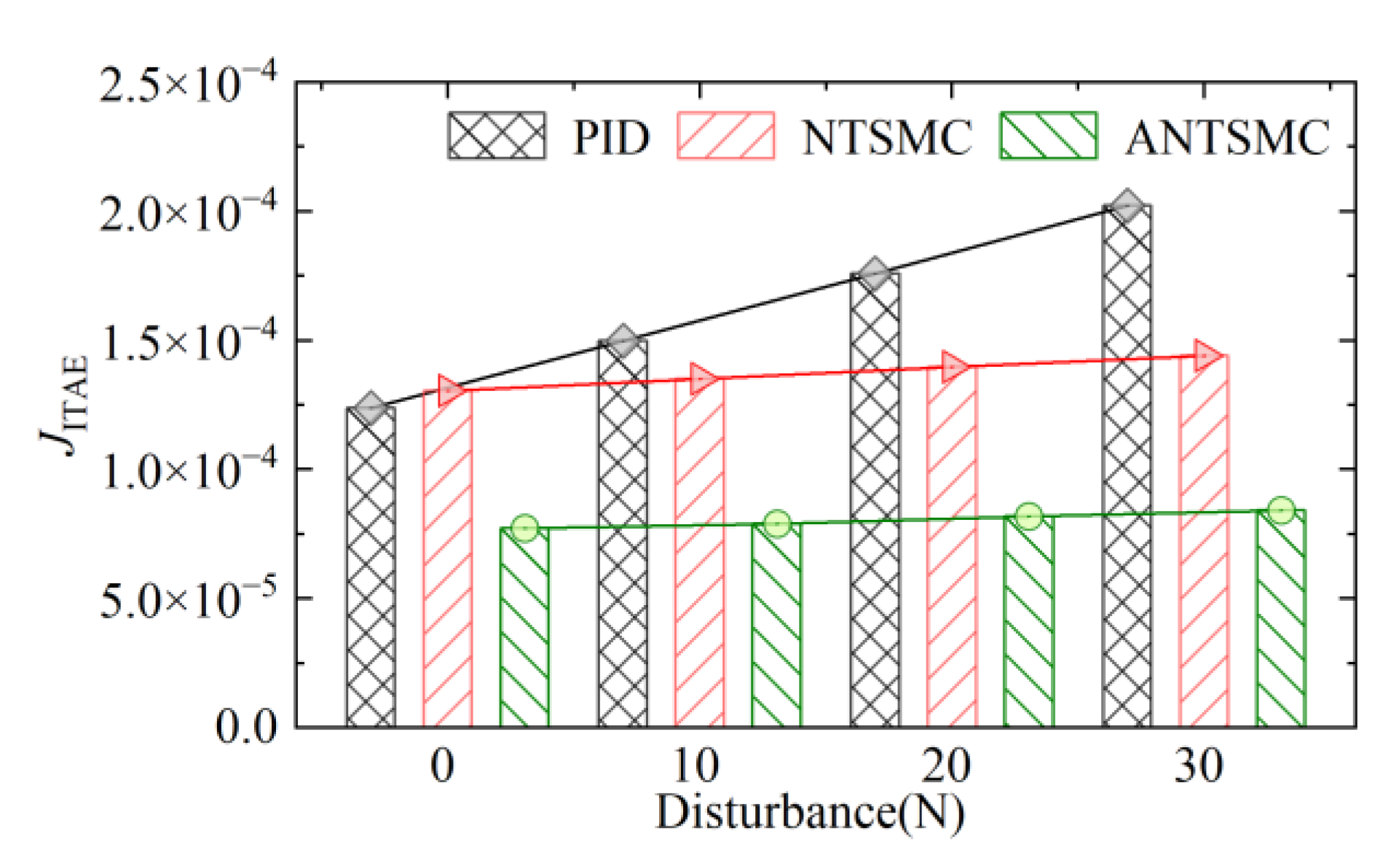
4.4. Robust Performance Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, D.; Zhao, W.; Cheng, Y.; Chen, Q.; Xu, L. Power factor improvement of permanent-magnet linear vernier motor by using dual-inverter with hybrid discontinuous PWM. IET Power Electron. 2019, 12, 3438–3446. [Google Scholar] [CrossRef]
- Lenin, N.; Sanjeevikumar, P.; Iqbal, A.; Mbohwa, C. Linear Synchronous Reluctance Motor—A Comprehensive Review. Adv. Syst. Control. Autom. 2018, 45–70. [Google Scholar]
- Li, B.; Liu, Y.; Tan, C.; Qin, Q.; Lu, Y. Review on electro-hydrostatic actuator: System configurations, design methods and control technologies. Int. J. Mechatron. Manuf. Syst. 2020, 13, 323–346. [Google Scholar] [CrossRef]
- Yu, X.; Lin, C.; Zhao, M.; Yi, J.; Su, Y.; Liu, H. Optimal energy management strategy of a novel hybrid dual-motor transmission system for electric vehicles. Appl. Energy 2022, 321, 119395. [Google Scholar] [CrossRef]
- Tan, C.; Li, B.; Ge, W. Thermal quantitative analysis and design method of bistable permanent magnet actuators based on multiphysics methodology. IEEE Trans. Ind. Electron. 2019, 67, 7727–7735. [Google Scholar] [CrossRef]
- Tan, C.; Li, B.; Liu, Y.; Ge, W.; Sun, B. Multiphysics methodology for thermal modelling and quantitative analysis of electromagnetic linear actuator. Smart Mater. Struct. 2019, 28, 087001. [Google Scholar] [CrossRef]
- Lu, J.; Li, B.; Ge, W.; Tan, C.; Sun, B.J.M.S.; Processing, S. Analysis and experimental study on servo dynamic stiffness of electromagnetic linear actuator. Mech. Syst. Sig. Process. 2022, 169, 108587. [Google Scholar] [CrossRef]
- Tan, C.; Ge, W.; Fan, X.; Lu, J.; Li, B.; Sun, B. Bi-stable actuator measurement method based on voice coil motor. Sens. Actuators A 2019, 285, 59–66. [Google Scholar] [CrossRef]
- Luo, C.; Lin, Z.; Sun, J. Design of linear voice coil motor with semi-closed structure. IET Electr. Power Appl. 2019, 13, 1574–1579. [Google Scholar] [CrossRef]
- Hsu, C.-F.; Chen, B.-R.; Wu, B.-F. Fuzzy Broad Learning Adaptive Control for Voice Coil Motor Drivers. Int. J. Fuzzy Syst. 2022, 24, 1696–1707. [Google Scholar] [CrossRef]
- Ma, L.; Wang, J.-P.; Li, F.-T.; Zeng, Y.-X.; Liu, Z.-L. Friction modeling and compensation of precision position system. Opt. Precis. Eng. 2019, 27, 121–128. [Google Scholar]
- Guc, A.F.; Yumrukcal, Z.; Ozcan, O. Nonlinear identification and optimal feedforward friction compensation for a motion platform. Mechatronics 2020, 71, 102408. [Google Scholar] [CrossRef]
- Lu, Y.; Tan, C.; Ge, W.; Li, B.; Lu, J. Improved Sliding Mode-Active Disturbance Rejection Control of Electromagnetic Linear Actuator for Direct-Drive System. Actuators 2021, 10, 138. [Google Scholar] [CrossRef]
- Shao, D.; Xu, S.-C.; Du, A.-M. Dynamic friction modelling and parameter identification for electromagnetic valve actuator. J. Cent. South Univ. 2018, 25, 3004–3020. [Google Scholar] [CrossRef]
- Huang, S.; Liang, W.; Tan, K.K. Intelligent friction compensation: A review. IEEE/ASME Trans. Mechatron. 2019, 24, 1763–1774. [Google Scholar] [CrossRef]
- Guo, K.; Pan, Y.; Yu, H. Composite learning robot control with friction compensation: A neural network-based approach. IEEE Trans. Ind. Electron. 2018, 66, 7841–7851. [Google Scholar] [CrossRef]
- Li, D.; Tan, C.; Ge, W.; Cui, J.; Gu, C.; Chi, X. Review of Brake-by-Wire System and Control Technology. Actuators 2022, 11, 80. [Google Scholar] [CrossRef]
- Chen, S.-Y.; Yang, M.-C. Nonlinear contour tracking of a voice coil motors-driven dual-axis positioning stage using fuzzy fractional PID control with variable orders. Math. Probl. Eng. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Zhu, J.; Dai, J.; Wang, C. Model-free adaptive control of direct drive servo valve of electromagnetic linear actuator. Math. Probl. Eng. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Bo, L.; De-xiang, L.; Wen-qing, G.; Cao, T.; Jia-yu, L.; Ai-juan, S. Precision Control of Hydraulic Pressure in Fast-response Brake-by-wire System Based on Direct-drive Valve. China J. Highw. Transp. 2021, 34, 121. [Google Scholar]
- Wang, J.; Luo, X.; Wang, L.; Zuo, Z.; Guan, X. Integral sliding mode control using a disturbance observer for vehicle platoons. IEEE Trans. Ind. Electron. 2019, 67, 6639–6648. [Google Scholar] [CrossRef]
- Chen, G.; Jia, P.; Yan, G.; Liu, H.; Chen, W.; Jia, C.; Ai, C. Research on Feedback-Linearized Sliding Mode Control of Direct-Drive Volume Control Electro-Hydraulic Servo System. Processes 2021, 9, 1676. [Google Scholar] [CrossRef]
- Jiang, D.; Yu, W.; Wang, J.; Zhao, Y.; Li, Y.; Lu, Y. A speed disturbance control method based on sliding mode control of permanent magnet synchronous linear motor. IEEE Access 2019, 7, 82424–82433. [Google Scholar] [CrossRef]
- Li, H.; Cai, Y. Sliding mode control with double power reaching law. Control. Decis. 2016, 31, 498–502. [Google Scholar]
- Xu, D.; Ding, B.; Jiang, B.; Yang, W.; Shi, P. Nonsingular fast terminal sliding mode control for permanent magnet linear synchronous motor via high-order super-twisting observer. IEEE/ASME Trans. Mechatron. 2021, 27, 1651–1659. [Google Scholar] [CrossRef]
- Du, H.; Chen, X.; Wen, G.; Yu, X.; Lü, J. Discrete-time fast terminal sliding mode control for permanent magnet linear motor. IEEE Trans. Ind. Electron. 2018, 65, 9916–9927. [Google Scholar] [CrossRef]
- Wang, F.-C.; Wang, Y.-T.; Tian, D.-P. Perfect tracking control for fast-steering mirror driven by voice coil motor. Opt. Precis. Eng. 2020, 28, 1997. [Google Scholar] [CrossRef]
- Mansouri, S.A.; Ahmarinejad, A.; Javadi, M.S.; Heidari, R.; Catalão, J.P. Improved double-surface sliding mode observer for flux and speed estimation of induction motors. IET Electr. Power Appl. 2020, 14, 1002–1010. [Google Scholar] [CrossRef]
- Wang, X.; Shi, C.; Wang, S. Extended state observer-based motion synchronisation control for hybrid actuation system of large civil aircraft. Int. J. Syst. Sci. 2017, 48, 2212–2222. [Google Scholar] [CrossRef]
- Ye, D.; Zou, A.-M.; Sun, Z. Predefined-time predefined-bounded attitude tracking control for rigid spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 464–472. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, J.; Yang, X.; Zheng, Z.; Zhang, X.; Wang, L. Robust deadbeat predictive current regulation for permanent magnet synchronous linear motor drivers with parallel parameter disturbance and load observer. IEEE Trans. Power Electron. 2022, 37, 7834–7845. [Google Scholar] [CrossRef]
- Tan, C.; Li, B.; Ge, W.; Sun, B. Design and analysis of a bi-stable linear force actuator for directly-driven metering pump. Smart Mater. Struct. 2018, 27, 107001. [Google Scholar] [CrossRef]
- Wang, Z.; Jiao, Z.; Li, X. Matching design rules of linear-driven electro-hydrostatic actuator. J. Beijing Univ. Aeronaut. Astronaut. 2018, 44, 1037–1047. [Google Scholar] [CrossRef]
- Lu, J.; Chang, S.; Liu, L.; Fan, X. Point-to-point motions control of an electromagnetic direct-drive gas valve. J. Mech. Sci. Technol. 2018, 32, 363–371. [Google Scholar] [CrossRef]
- Li, C.; Chen, Z.; Yao, B. Identification and adaptive robust precision motion control of systems with nonlinear friction. Nonlinear Dyn. 2019, 95, 995–1007. [Google Scholar] [CrossRef]
- Yue, F.; Li, X. Robust adaptive integral backstepping control for opto-electronic tracking system based on modified LuGre friction model. ISA Trans. 2018, 80, 312–321. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.-J.; Yau, H.-T.; Tian, Y.-C. Identification and compensation of nonlinear friction characteristics and precision control for a linear motor stage. IEEE/ASME Trans. Mechatron. 2012, 18, 1385–1396. [Google Scholar] [CrossRef]
- Mishra, J.P.; Yu, X.; Boiko, I. Frequency-response of Non-singular Terminal Sliding Mode Control with Actuators. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1392–1396. [Google Scholar] [CrossRef]
- Tian, Y.; Cai, Y.; Deng, Y. A fast-nonsingular terminal sliding mode control method with fixed-time stability guarantees. J. Chin. Inert. Technol. 2020, 28, 677–685. [Google Scholar] [CrossRef]
- Gambhire, S.; Kishore, D.R.; Londhe, P.; Pawar, S. Review of sliding mode based control techniques for control system applications. Int. J. Dyn. Control. 2021, 9, 363–378. [Google Scholar] [CrossRef]
- Yang, Z.; Ji, J.; Sun, X.; Zhu, H.; Zhao, Q. Active disturbance rejection control for bearingless induction motor based on hyperbolic tangent tracking differentiator. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 2623–2633. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: Berlin/Heidelberg, Germany, 2014; Volume 10. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | NB | NM | NS | ZO | PS | PM | PB |
|---|---|---|---|---|---|---|---|
| ξi | LA | ML | MS | Z | MS | ML | LA |
| ηi | LA | ML | MS | Z | MS | ML | LA |
| Controls | Simulation Results | Experimental Results |
|---|---|---|
| PID | 11.12 ms | 12.25 ms |
| NTSMC | 10.9 ms | 11.04 ms |
| ANTSMC | 9.63 ms | 9.85 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Lu, J.; Tan, C.; Tian, M.; Dong, G. Adaptive Non-Singular Terminal Sliding Mode Control Method for Electromagnetic Linear Actuator. Micromachines 2022, 13, 1294. https://doi.org/10.3390/mi13081294
Lu Y, Lu J, Tan C, Tian M, Dong G. Adaptive Non-Singular Terminal Sliding Mode Control Method for Electromagnetic Linear Actuator. Micromachines. 2022; 13(8):1294. https://doi.org/10.3390/mi13081294
Chicago/Turabian StyleLu, Yingtao, Jiayu Lu, Cao Tan, Maowen Tian, and Guoming Dong. 2022. "Adaptive Non-Singular Terminal Sliding Mode Control Method for Electromagnetic Linear Actuator" Micromachines 13, no. 8: 1294. https://doi.org/10.3390/mi13081294