
Study on Detection of a Small Magnetic Particle Using Thin Film Magneto-Impedance Sensor with Subjecting to Strong Normal Field

Abstract
:1. Introduction
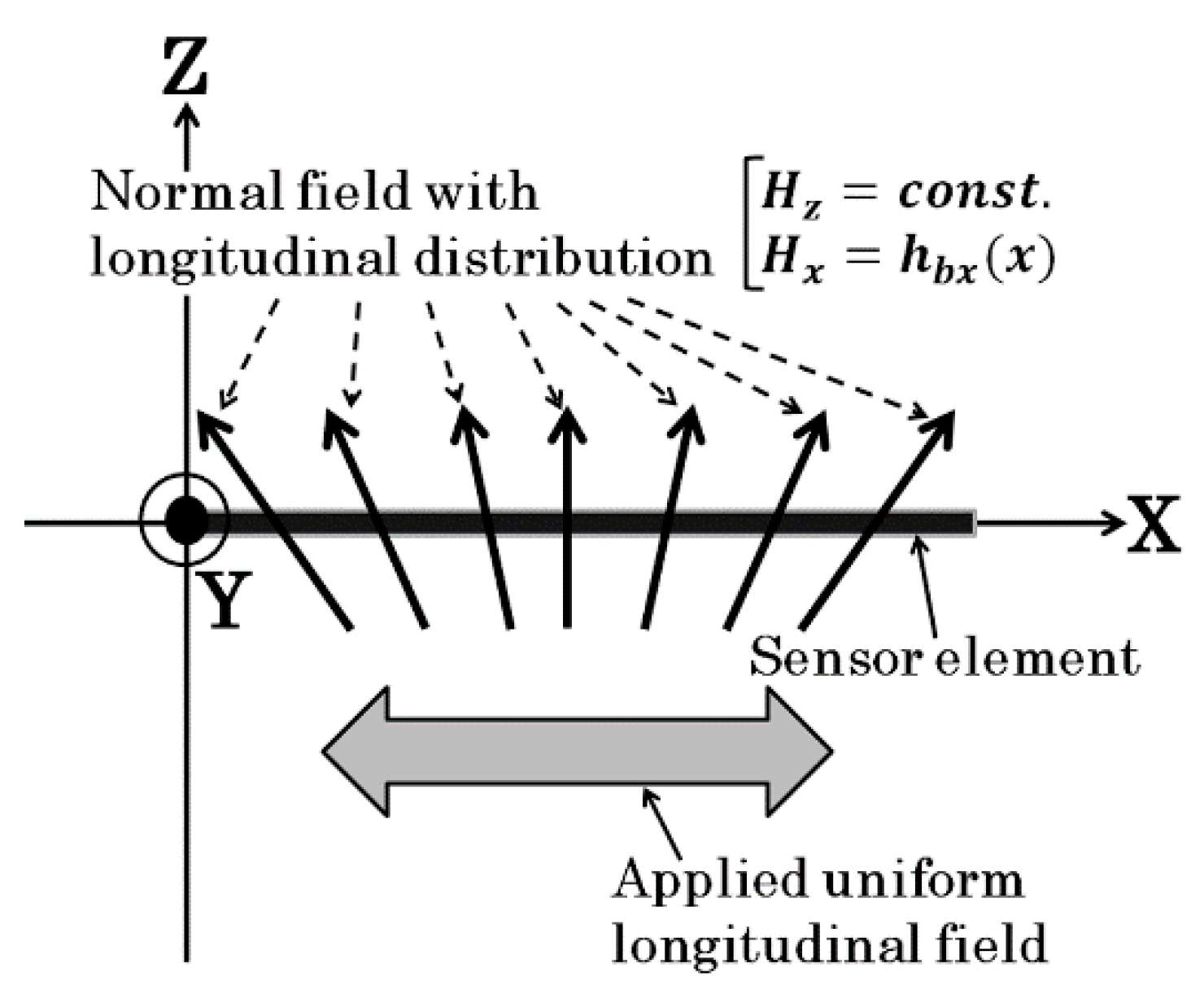
2. Theoretical Formulation of Sensing a Vertically Magnetized Particle
2.1. Case of Far Distance batween Sensor and Magnetized Particle
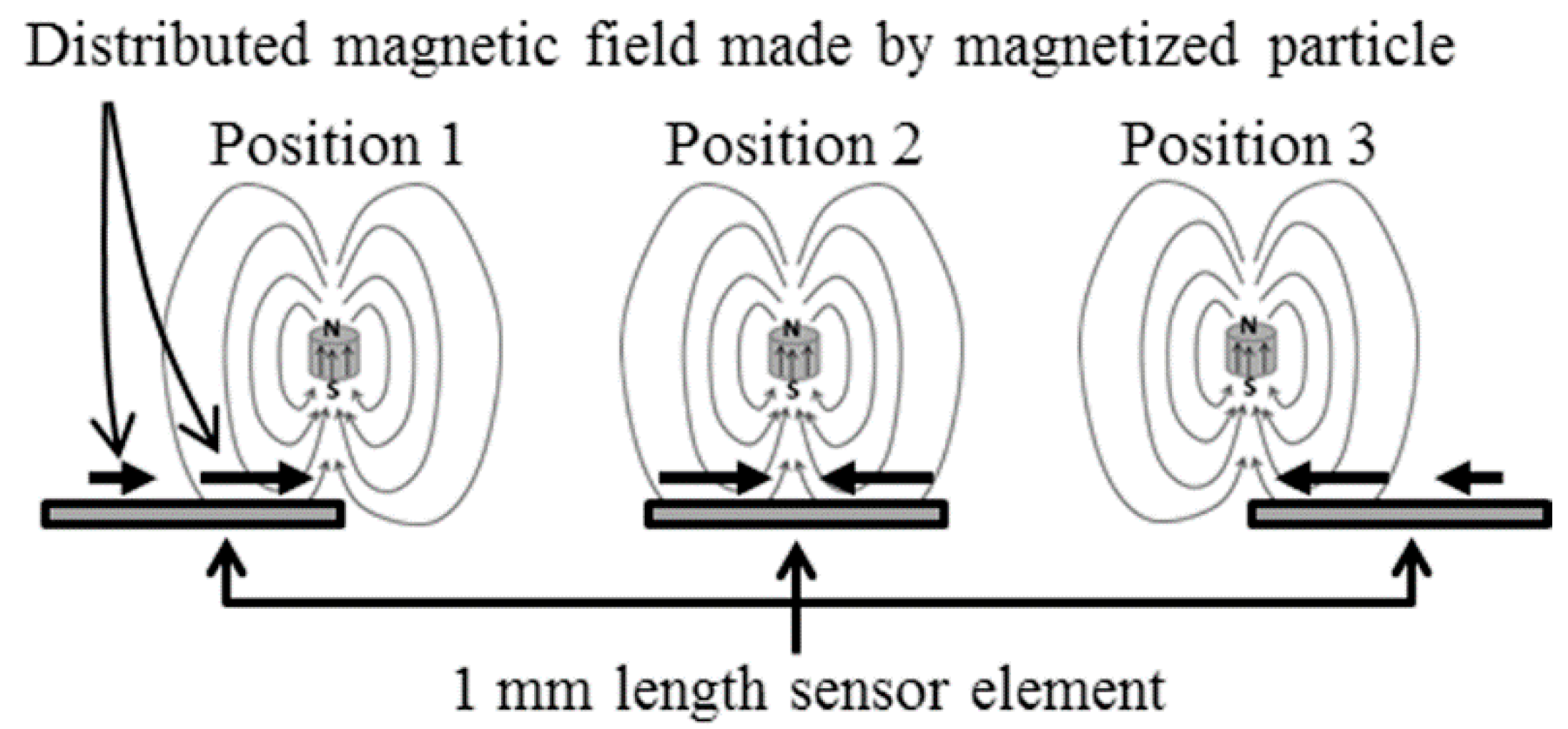
2.2. Case of a Magnetized Particle Running in the Vicinity of Sensor Element
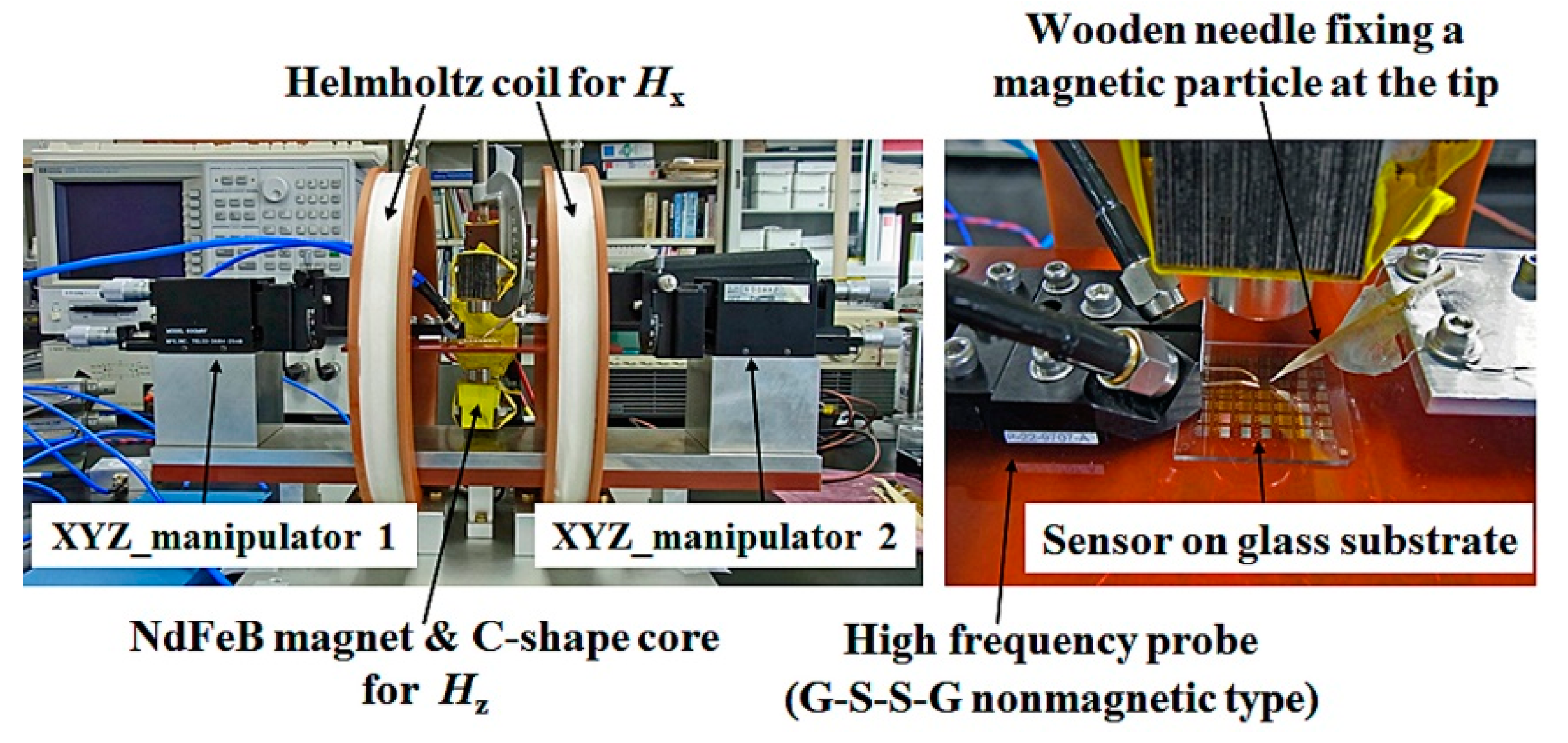
3. Experiment and Discussion
3.1. Sensor Impedance Property and Sensitivity
3.1.1. Variation of MI-Curve as a Function of Normal Field
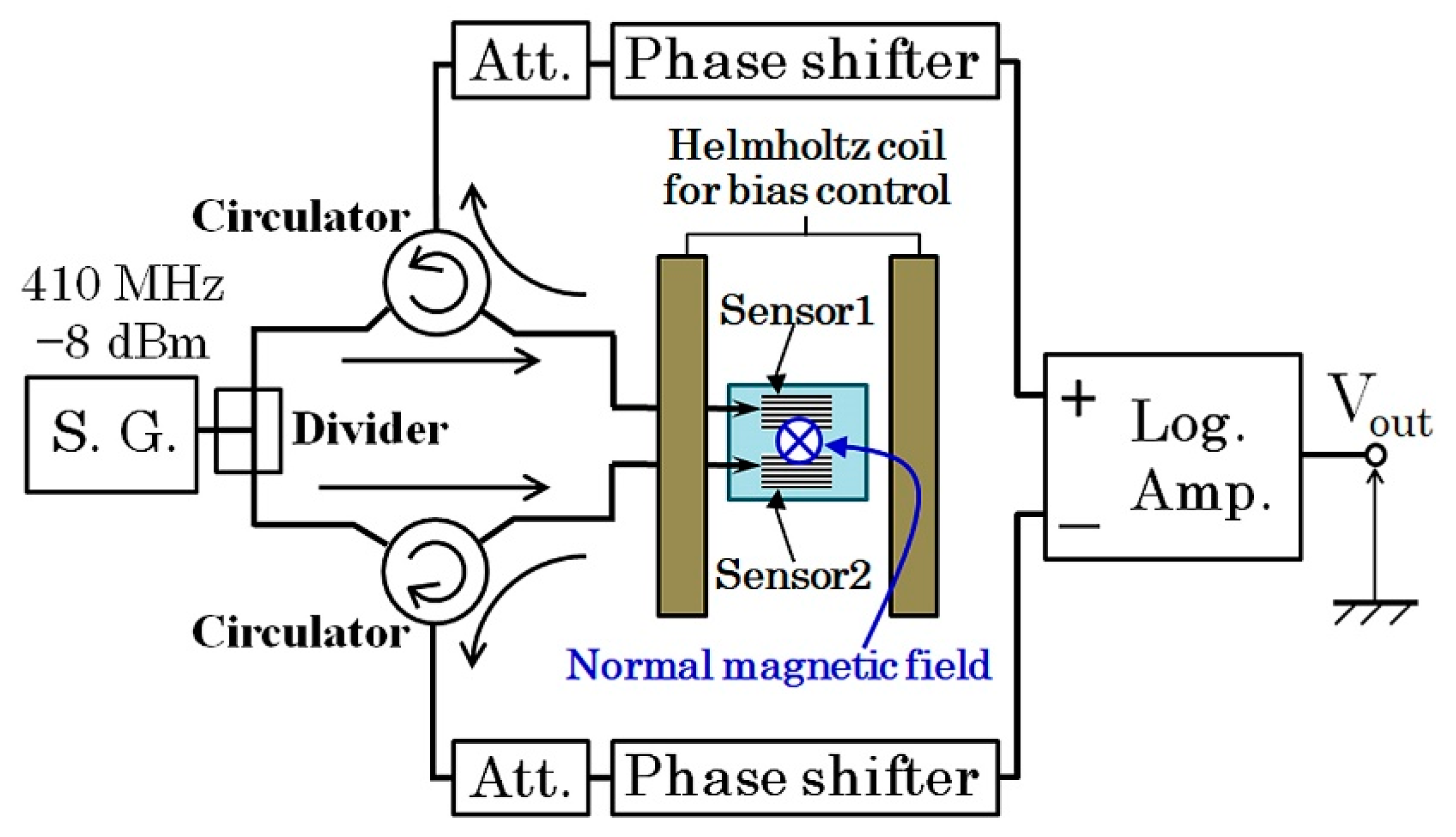
3.1.2. Sensitivity Evaluation Using Carrier-Suppressing Circuit
3.2. Detection of Small Particle in the Vicinity of the Sensor Element
3.2.1. Measurement in Case of Single Strip Sensor
3.2.2. Measurement in Case of Meander Shaped Differential Sensor
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Jimenez, V.O.; Hwang, K.Y.; Nguyen, D.; Rahman, Y.; Albrecht, C.; Senator, B.; Thiabgoh, O.; Devkota, J.; Bui, V.D.A.; Lam, D.S.; et al. Magnetoimpedance Biosensors and Real-Time Healthcare Monitors: Progress, Opportunities, and Challenges. Biosensors 2022, 12, 517. [Google Scholar] [CrossRef] [PubMed]
- Olsvik, O.; Popovic, T.; Skjerve, E.; Cudjoe, K.S.; Hornes, E.; Ugelstad, J.; Uhlén, M. Magnetic separation techniques in diagnostic microbiology. Clin. Microbiol. Rev. 1994, 7, 43–54. [Google Scholar] [CrossRef] [PubMed]
- Langer, R. New Methods of Drug Delivery. Science 1990, 249, 1527–1533. [Google Scholar] [CrossRef] [PubMed]
- Polyak, B.; Friedman, G. Magnetic targeting for site-specific drug delivery: Applications and clinical potential. Expert Opin. Drug Deliv. 2009, 6, 53–70. [Google Scholar] [CrossRef]
- Pankhurst, Q.A.; Connolly, J.; Jones, S.K.; Dobson, J. Applications of magnetic nanoparticles in biomedicine. J. Phys. D Appl. Phys. 2003, 36, 13. Available online: https://iopscience.iop.org/article/10.1088/0022-3727/36/13/201/pdf (accessed on 1 July 2022). [CrossRef]
- Sekino, M.; Kuwahata, A.; Ookubo, T.; Shiozawa, M.; Ohashi, K.; Kaneko, M.; Saito, I.; Inoue, Y.; Ohsaki, H.; Takei, H.; et al. Handheld magnetic probe with permanent magnet and Hall sensor for identifying sentinel lymph nodes in breast cancer patients. Sci. Rep. 2018, 8, 1195. [Google Scholar] [CrossRef]
- Mohri, K.; Bushida, K.; Noda, M.; Yoshida, H.; Panina, L.V.; Uchiyama, T. Magneto-Impedance Element. IEEE Trans. Magn. 1995, 31, 2455–2460. [Google Scholar]
- Yabukami, S.; Suzuki, T.; Ajiro, N.; Kikuchi, H.; Yamaguchi, M.; Arai, K. A high frequency carrier-type magnetic field sensor using carrier suppressing circuit. IEEE Trans. Magn. 2001, 37, 2019–2021. [Google Scholar] [CrossRef]
- Nakai, T. Sensitivity of thin film magnetoimpedance sensor in 0.3 T surface normal magnetic field. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 1230–1235. [Google Scholar] [CrossRef]
- Nakai, T. Nondestructive detection of magnetic contaminant in aluminum casting using thin film magnetic sensor. Sensors 2021, 21, 4063. [Google Scholar] [CrossRef] [PubMed]
- Nakai, T. A Uniform Magnetic Field Generator Combined with a Thin-Film Magneto-Impedance Sensor Capable of Human Body Scans. Sensors 2022, 22, 3120. [Google Scholar] [CrossRef] [PubMed]
- Kurlyandskaya, G.V.; Levit, V. Magnetic Dynabeads Detection by Sensitive Element Based on Giant Magnetoimpedance. Biosens. Bioelectron. 2005, 20, 1611–1616. [Google Scholar] [CrossRef] [PubMed]
- Kurlyandskaya, G.V.; Sánchez, M.L.; Hernando, B.; Prida, V.M.; Gorria, P.; Tejedor, M. Giant-Magnetoimpedance-Based Sensitive Element as a Model for Biosensors. Appl. Phys. Lett. 2003, 82, 3053–3055. [Google Scholar] [CrossRef]
- Rife, J.C.; Miller, M.M.; Sheehan, P.E.; Tamanaha, C.R.; Tondra, M.; Whitman, L.J. Design and performance of GMR sensors for the detection of magnetic microbeads in biosensors. Sens. Actuators A Phys. 2003, 107, 209–218. [Google Scholar] [CrossRef]
- Li, G.; Joshi, V.; White, R.L.; Wang, S.X.; Kemp, J.T.; Webb, C.; Davis, R.W.; Sun, S. Detection of single micron-sized magnetic bead and magnetic nanoparticles using spin valve sensors for biological applications. J. Appl. Phys. 2003, 93, 7557. [Google Scholar] [CrossRef]
- Miller, M.M.; Prinz, G.A.; Cheng, S.-F.; Bounnak, S. Detection of a micron-sized sphere using a ring-shaped anisotropic magnetoresistance-based sensor; A model for a magnetoresistance-based biosensor. Appl. Phys. Lett. 2001, 81, 2211. [Google Scholar] [CrossRef]
- Chiriac, H.; Tibu, M.; Moga, A.E.; Herea, D.D. Magnetic GMI sensor for detection of biomolecules. J. Magn. Magn. Mater. 2005, 293, 671–676. [Google Scholar] [CrossRef]
- Chung, S.H.; Hoffmann, A.; Bader, S.D.; Liu, C.; Kay, B.; Makowski, L.; Chen, L. Biological sensors based on Brownian relaxation of magnetic nanoparticles. Appl. Phys. Lett. 2004, 85, 2971. [Google Scholar] [CrossRef]
- Garcia-Ambas, A.; Martinez, F.; Fernandez, E.; Ozaeta, I.; Kurlyandskaya, G.V.; Svalov, A.V.; Berganzo, J.; Barandiaran, J.M. GMI detection of magnetic-particles concentration in continuous flow. Sens. Actuators A Phys. 2011, 172, 103–108. [Google Scholar] [CrossRef]
- Devkota, J.; Wang, C.; Ruiz, A.; Mohapatra, S.; Mukherjee, P.; Srikanth, H.; Phan, M.H. Detection of low-concentration superparamagnetic nanoparticles using an integrated radio frequency magnetic biosensor. J. Appl. Phys. 2013, 113, 104701. [Google Scholar] [CrossRef]
- Nakai, T. Study on detection of small particle using high-frequency carrier-type thin film magnetic field sensor with subjecting to strong normal field. In The papers of Technical Meeting on Physical Sensor, IEE Japan PHS-16-15; 2016; pp. 11–20, (In Japanese). Available online: http://id.nii.ac.jp/1031/00093680/ (accessed on 30 April 2019).
- JNS Co., Ltd.; Tohoku Techno Arch Co., Ltd.; Miyagi Prefectural Government. Magnetic Contaminant Detection Equipment and Its Detection Method. Japanese patent 5793735, 19 February 2013. [Google Scholar]
- Nakai, T. Magneto-impedance sensor driven by 400 MHz logarithmic amplifier. Micromachines 2019, 10, 355. [Google Scholar] [CrossRef] [PubMed]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Model Number | Manufacturer | |
|---|---|---|---|
| 1 | Signal generator | MG3633A | Anritsu Corporation (5-1-1 Onna, Atsugi-shi, Kanagawa 243-8555, JAPAN) |
| 2 | Divider | (Conventional 3-port resistive divider (50)) | |
| 3 | Circulator | ADC040CSWH | ADMOTECH Inc. (1320, Gwanpyung-Dong, Yusong-Gu, Daejon 305-509, SOUTH KOREA) |
| 4 | Attenuator | Combination of 8594A and 8595A | Keysight Technologies (1400 Fountaingrove Parkway, Santa Rosa, CA 95403 USA) |
| 5 | Phase sifter | P1103 | Narda-ATM Inc. (435 Moreland Rd, Hauppauge, NY 11788 USA) |
| 6 | Spectrum analyzer | RSA3408A | Tektronix (14200 SW Karl Braun Dr, Beaverton, OR 97077 USA) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakai, T. Study on Detection of a Small Magnetic Particle Using Thin Film Magneto-Impedance Sensor with Subjecting to Strong Normal Field. Micromachines 2022, 13, 1199. https://doi.org/10.3390/mi13081199
Nakai T. Study on Detection of a Small Magnetic Particle Using Thin Film Magneto-Impedance Sensor with Subjecting to Strong Normal Field. Micromachines. 2022; 13(8):1199. https://doi.org/10.3390/mi13081199
Chicago/Turabian StyleNakai, Tomoo. 2022. "Study on Detection of a Small Magnetic Particle Using Thin Film Magneto-Impedance Sensor with Subjecting to Strong Normal Field" Micromachines 13, no. 8: 1199. https://doi.org/10.3390/mi13081199