
Study on the Motion Characteristics of Solid Particles in Fine Flow Channels by Ultrasonic Cavitation

Abstract
:1. Introduction
2. Numerical Theoretical Analysis of Cavitation Bubbles
2.1. Cavitation Bubble Dynamics Model
2.2. Analysis of Influencing Factors of Microjets Generated by Cavitation Bubble Collapse
2.2.1. Influence of the Dimensionless Quantity on Cavitation Microfluidic Jets
2.2.2. Effect of the Cavitation Bubble Radius on Cavitation Microfluidic Jets
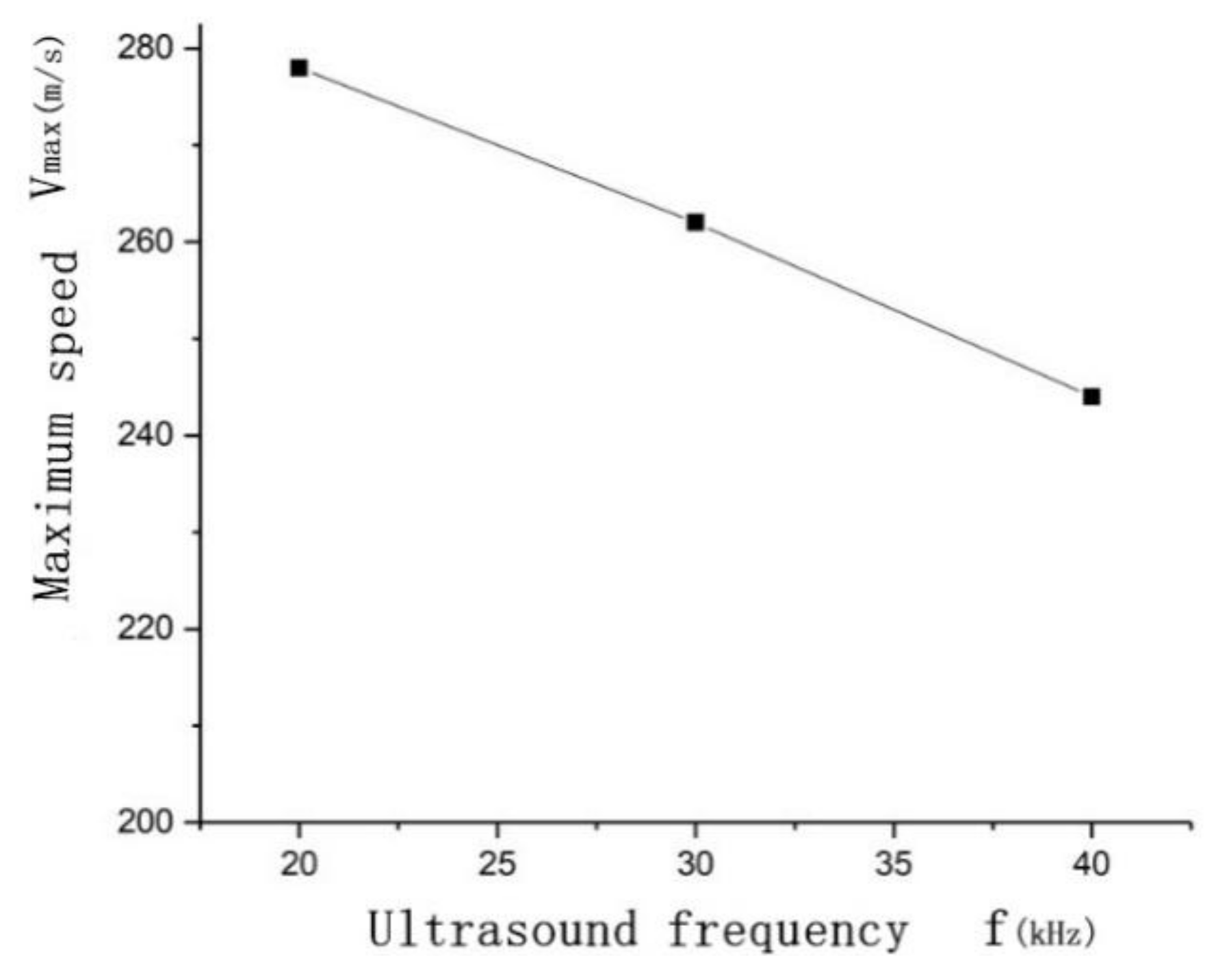
2.2.3. The Effect of an Ultrasonic Sound Field on Cavitation Microfluidic Jets
3. Ultrasonic Cavitation Model and Numerical Simulation
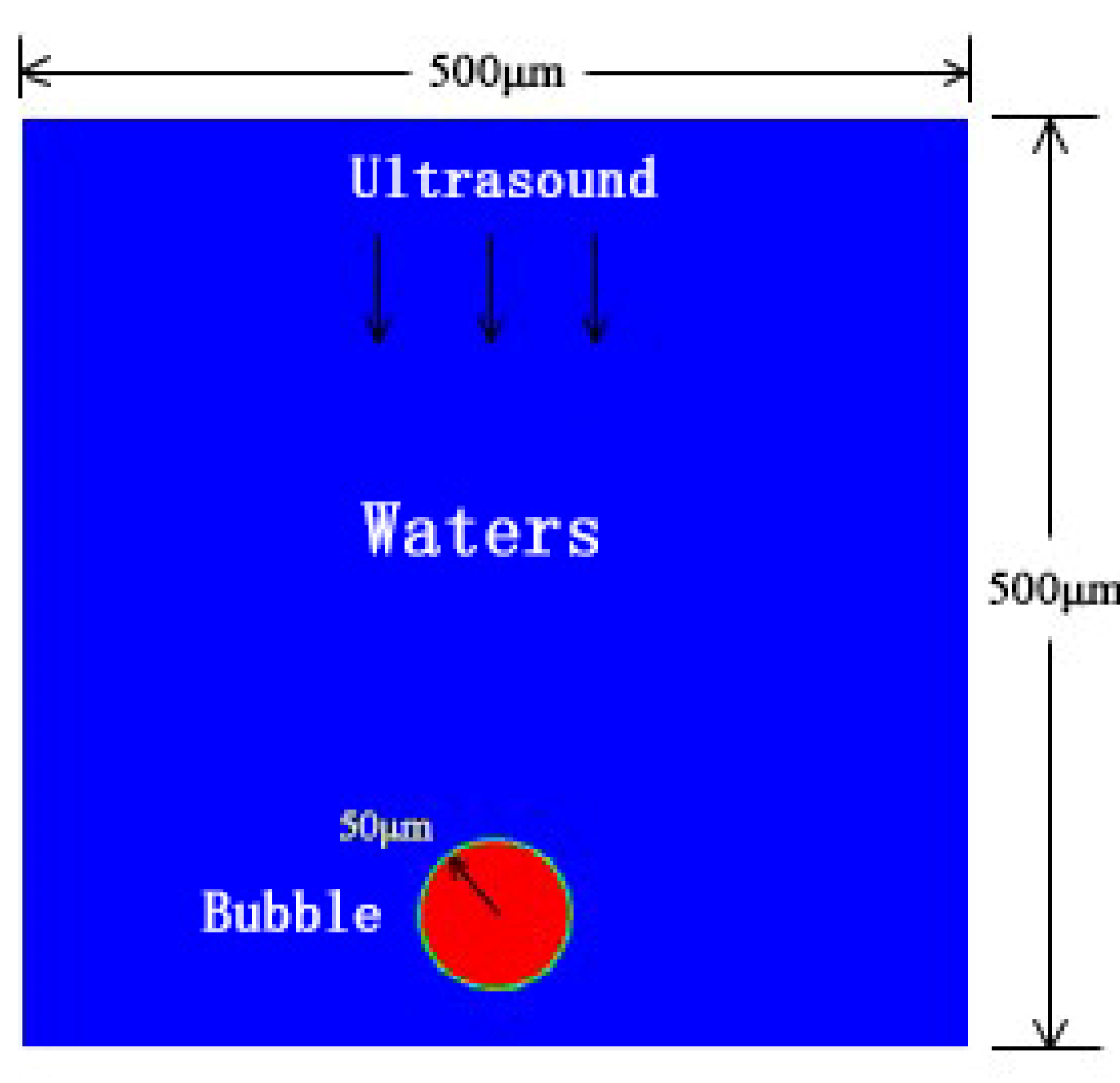
3.1. Model Building
3.2. Platform Basic Meshing and Calculation Setting
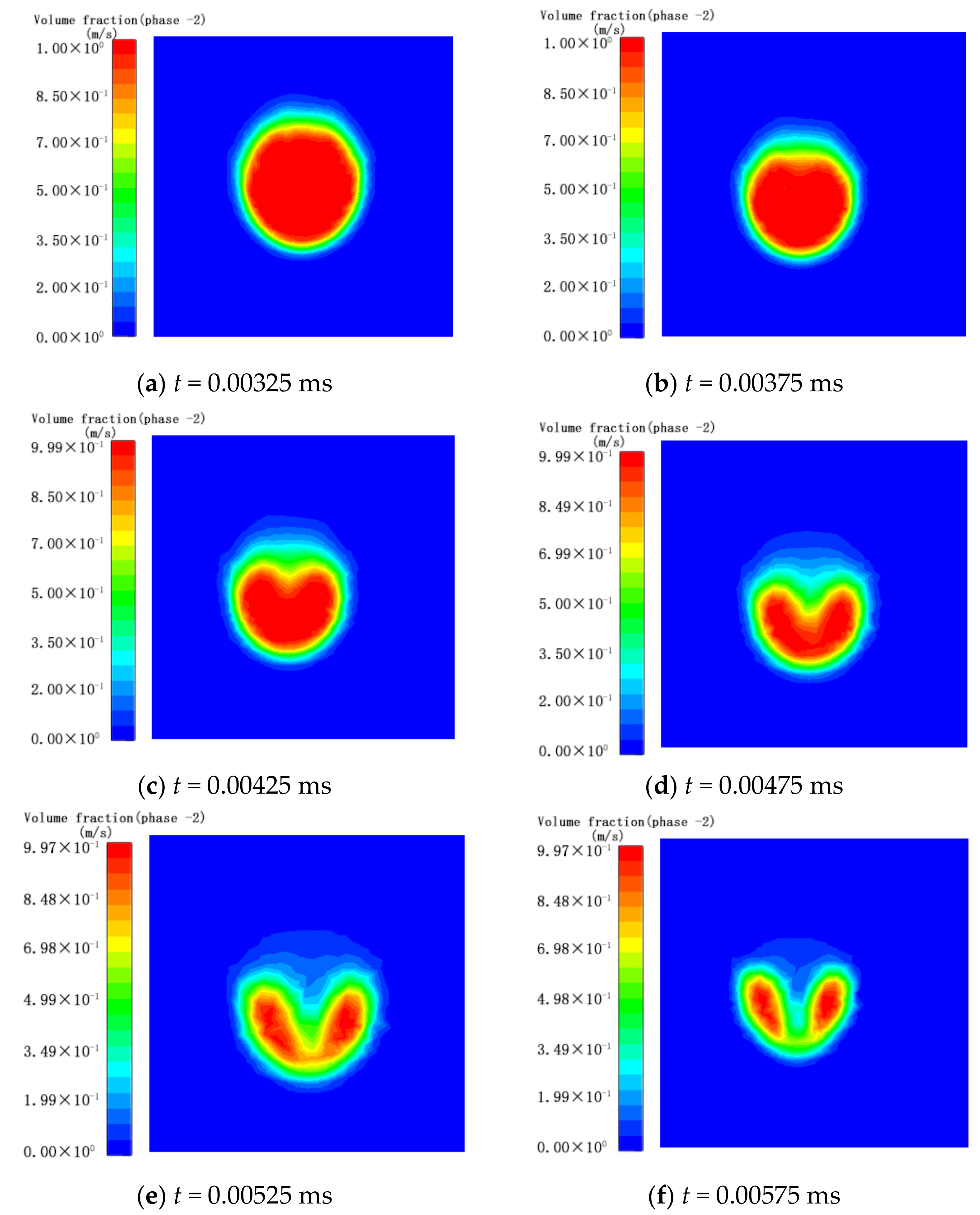
3.3. Analysis of Results
4. Ultrasonic Cavitation Bubble Observation Test
4.1. Ultrasonic Cavitation Observation Test Platform
- Ultrasonic transmitter: produced by Shanghai Qixun Instrument Co., Ltd. (Shanghai, China), model QUN-650Y. The rated power is 650 W (the actual power is adjustable from 1% to 99%). The equipped horn has a diameter of 6 mm, a vibration frequency of 20 kHz, and an error of ±1.0 kHz.
- Microfluid syringe pump: produced by Harvard Company, (Boston, MA, USA); the model is Pump 11 Elite. This syringe pump can be used with a 0.5 μL to 50 mL syringe; the delivery speed range is 1.28 pl/min to 88.28 mL/min, and the delivery accuracy is ±0.5%.
- High-speed camera: Produced by Japan NAC Company (Tokyo, Japan); the model is MEMRECAM HX-6. NAC MEMRECAM HX-6 is a high-resolution, high-speed, high-sensitivity camera. It has a resolution of 2560 × 1920 pixels and a maximum shooting speed of 210,000 fps. Because the camera’s memory is limited, a single shot can only record thousands of photos. Therefore, in high-frequency shooting, the recording time is very short, so it is usually necessary to use a delay trigger.
- Light source: produced by Japan Altec system company (Tokyo, Japan); the model is LLBK1-LA-W-0022, with a power of 160 W. There is a high-concentrating convex lens in front of the light source that focuses the light emitted by the light source to the focal point and improves the local brightness. This is necessary for experiments with poor reflectivity, such as shooting bubbles in water.
- Superabsorbent polymer particles: the superabsorbent polymer particles were in a translucent state, contained strong hydrophilic groups, and can absorb thousands of times their own weight of water. These particles swell after absorbing water and have good elasticity.
4.2. Ultrasonic Cavitation Observation Experiment and Result Analysis
5. Conclusions
- (1)
- To address the problem of fluid mixing during ultrasonic cavitation, based on ultrasonic cavitation theory, a new study on the motion trajectory of fine particles after the generation of high-speed directional microjets by ultrasonic cavitation collapse was proposed and simulated by software. The experimental verification proved the feasibility of the research.
- (2)
- Through the analysis of the numerical simulation results, the best parameter values for the experiment were obtained, including the initial radius of the cavitation bubble, the ultrasonic frequency, the ultrasonic pressure, and dimensionless quantity, as well as the optimal parameters for the sound field. When the initial bubble radius R = 100 μm, γ = 1.6, the sound pressure intensity is 300 kPa, and the ultrasonic frequency f = 20 kHz, the maximum microjet velocity is generated. Therefore, the working condition under this parameter combination is selected as an example to analyze the characteristics of the bubble burst process, and experimental observation is carried out.
- (3)
- An ultrasonic cavitation observation test was used to verify the collapse process of a single bubble. At the same time, the superabsorbent polymerization particles were placed, and fixed hooks were used to facilitate observation. Microfluidic emission caused by bubble cavitation led to deformation of particles, which provided a realistic basis for the viewpoint that cavitation in the flow passage affected the movement trajectory of solid particles.
- (4)
- Through the comparative test of whether or not to apply the sound field, the upper part of the cavitation bubble wall sinks downward and collapses, forming a high-speed micro-jet and driving the particles near the top to move quickly to the bottom. The test results are consistent with the theoretical analysis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schmidt, J.; Plata, M.; Tröger, S.; Peukert, W. Production of polymer particles below 5μm by wet grinding. Powder Technol. 2012, 228, 84–90. [Google Scholar] [CrossRef]
- Gupta, V.; Sharma, S. Analysis of ball mill grinding operation using mill power specific kinetic parameters. Adv. Powder Technol. 2014, 25, 625–634. [Google Scholar] [CrossRef]
- Ge, J.Q.; Li, C.; Gao, Z.Y.; Ren, Y.L.; Xu, X.S.; Li, C.; Xie, Y. Softness abrasiveflow polishing method using constrained boundary vibration. Powder Technol. 2021, 382, 173–187. [Google Scholar] [CrossRef]
- Liang, Z.Q.; Ma, Y.; Nie, Q.Q. Experimental study on ultrasonic cavitation assisted drilling of stainless steel microholes. J. Mech. Eng. 2020, 56, 205–212. [Google Scholar]
- He, J.-H.; Qian, M.-Y.; Li, Y. The Maximal Wrinkle Angle During the Bubble Collapse and Its Application to the Bubble Electrospinning. Front. Mater. 2022, 8, 801–803. [Google Scholar] [CrossRef]
- Xiang, J.C. Study on the Crushing Effect of Cavitation Impact on Fine Particles under Liquid Phase; Zhejiang University of Technology: Hangzhou, China, 2018. [Google Scholar]
- Lv, Z.; Hou, R.; Zhang, Z.; Fan, Z. Effect of ultrasonic vibration on cavitation erosion of aluminum oxide in fluid jet machining. Int. J. Adv. Manuf. Technol. 2020, 111, 2911–2918. [Google Scholar] [CrossRef]
- Ge, M.; Ji, S.; Tan, D.; Cao, H. Erosion analysis and experimental research of gas-liquid-solid soft abrasive flow polishing based on cavitation effects. Int. J. Adv. Manuf. Technol. 2021, 114, 3419–3436. [Google Scholar] [CrossRef]
- Shang, X.; Huang, X. Investigation of the Dynamics of Cavitation Bubbles in a Microfluidic Channel with Actuations. Micromachines 2022, 13, 203. [Google Scholar] [CrossRef]
- Pang, H.; Gracious, N. Utilization of Secondary Jet in Cavitation Peening and Cavitation Abrasive Jet Polishing. Micromachines 2022, 13, 86. [Google Scholar] [CrossRef]
- Qin, D.; Zou, Q.Q.; Lei, S.; Wei, W.; Li, Z.Y. Cavitation Dynamics and Inertial Cavitation Threshold of Lipid Coated Microbubbles in Viscoelastic Media with Bubble–Bubble Interactions. Micromachines 2021, 12, 1125. [Google Scholar] [CrossRef]
- Ge, J.-Q.; Ren, Y.-L.; Xu, X.-S.; Li, C.; Li, Z.-A.; Xiang, W.-F. Numerical and experimental study on the ultrasonic-assisted soft abrasive flow polishing characteristics. Int. J. Adv. Manuf. Technol. 2021, 112, 3215–3233. [Google Scholar] [CrossRef]
- Bogovic, J.; Schwinger, A.; Stopic, S.; Schröder, J.; Gaukel, V.; Schuchmann, H.; Friedrich, B. Controlled droplet size distribution in ultrasonic spray pyrolysis. Metall 2011, 10, 455–459. [Google Scholar]
- Stopic, S.; Wenz, F.; Husovic, T.-V.; Friedrich, B. Synthesis of Silica Particles Using Ultrasonic Spray Pyrolysis Method. Metals 2021, 11, 463. [Google Scholar] [CrossRef]
- Qi, H.; Qin, S.; Cheng, Z.; Zou, Y.; Cai, D.; Wen, D. DEM and experimental study on the ultrasonic vibration-assisted abrasive finishing of WC-8Co cemented carbide cutting edge. Powder Technol. 2020, 378, 716–723. [Google Scholar] [CrossRef]
- Nag, A.; Hloch, S.; Dixit, A.R.; Pude, F. Utilization of ultrasonically forced pulsating water jet decaying for bone cement removal. Int. J. Adv. Manuf. Technol. 2020, 110, 829–840. [Google Scholar] [CrossRef]
- Liew, P.J.; Yan, J.; Kuriyagawa, T. Fabrication of deep micro-holes in reaction-bonded SiC by ultrasonic cavitation assisted micro-EDM. Int. J. Mach. Tools Manuf. 2014, 76, 13–20. [Google Scholar] [CrossRef]
- Ji, S.M.; Qiu, Y.; Tan, D.P. Mechanism and experimental study of soft abrasive flow ultrasonic strengthening. J. Mech. Eng. 2014, 50, 84–93. [Google Scholar] [CrossRef]
- Toh, C.K. The use of ultrasonic cavitation peening to improve micro-burr-free surfaces. Int. J. Adv. Manuf. Technol. 2006, 31, 688–693. [Google Scholar] [CrossRef]
- Ye, L.Z.; Zhu, X.J.; Wang, J.Q. Research on cavitation micro-jet impact of ultrasonic honing based on SPH-FEM. J. Vib. Shock. 2016, 35, 72–77. [Google Scholar]
- Zhu, H.J.; Han, Q.H.; Wang, J.; He, S.Y.; Wang, D. Numerical investigation of the process andflow erosion offlushing oil tank with nitrogen. Powder Technol. 2015, 275, 12–24. [Google Scholar] [CrossRef]
- Yang, Z.Y.; Hou, X. Then discuss the quantization of time domain and its physical essence. Acta Photonica Sin. 1998, 12, 2–9. [Google Scholar]
- Sascha, H.; Michael, P. Analysis of Rayleigh-Plesset dynamics for sonoluminescing bubbles. Journal of Fluid Mechanics. 1998, 365, 171–204. [Google Scholar]
- Aljaz, O.; Matevz, D.; Brane, S. Numerical Simulation of a Near-Wall Bubble Collapse in an Ultrasonic Field. J. Fluid Sci. Technol. 2009, 4, 210–221. [Google Scholar]
- Priyanka, A.; Hanif, A.; Vijayanand, S. Mechanistic and kinetic investigations in ultrasound assisted acid catalyzed biodiesel synthesis. Chem. Eng. J. 2012, 187, 248–260. [Google Scholar]
- Sergey, K.; Kazuhiro, O.; Yasuo, I. Characterization of acoustic cavitation in water and molten aluminum alloy. Ultrason. Sonochemistry 2013, 20, 754–761. [Google Scholar]
- Ge, J.Q.; Hu, W.P.; Xi, Y.X.; Ren, Y.L.; Xu, X.S.; Zhang, C. Gas-liquid-solid swirlingflow polishing and bubble collapse impact characteristics. Powder Technol. 2021, 390, 315–329. [Google Scholar] [CrossRef]
- Li, L.; Qi, H.; Yin, Z.C.; Li, D.F.; Zhu, Z.L.; Tangwarodomnukun, V.; Tan, D. Investigation on the multiphase sink vortex Ekman pumping effects by CFD-DEM coupling method. Powder Technol. 2020, 360, 462–480. [Google Scholar] [CrossRef]
- Jin, W.; Xiao, J.; Ren, H.X. Three-dimensional simulation of impinging jet atomization of soft mist inhalers using the hybrid VOF-DPM model. J. Powder Technol. 2022, 407, 822–829. [Google Scholar] [CrossRef]
- Ji, S.M.; Chen, K.; Tan, D.P. Effect of ultrasonic cavitation on cutting efficiency and quality of soft abrasive flow. J. Mech. Eng. 2017, 33, 82–90. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Initial Bubble Radius R0 (μm) | Ultrasound Frequency f (kHz) |
|---|---|---|
| 1 | 50 | 20 |
| 2 | 50 | 30 |
| 3 | 50 | 40 |
| 4 | 75 | 20 |
| 5 | 100 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, M.; Li, C.; Ge, J.; Xu, Q.; Li, Z. Study on the Motion Characteristics of Solid Particles in Fine Flow Channels by Ultrasonic Cavitation. Micromachines 2022, 13, 1196. https://doi.org/10.3390/mi13081196
Yuan M, Li C, Ge J, Xu Q, Li Z. Study on the Motion Characteristics of Solid Particles in Fine Flow Channels by Ultrasonic Cavitation. Micromachines. 2022; 13(8):1196. https://doi.org/10.3390/mi13081196
Chicago/Turabian StyleYuan, Mu, Chen Li, Jiangqin Ge, Qingduo Xu, and Zhian Li. 2022. "Study on the Motion Characteristics of Solid Particles in Fine Flow Channels by Ultrasonic Cavitation" Micromachines 13, no. 8: 1196. https://doi.org/10.3390/mi13081196