
Investigation into Mode Localization of Electrostatically Coupled Shallow Microbeams for Potential Sensing Applications


Abstract
:1. Introduction
2. Device Geometrical Properties and Operational Mechanism
3. Mathematical Modeling
3.1. Equations of Motion
- lower microbeam
- upper microbeam
3.2. Normalization Process
- lower microbeam
- upper microbeam
3.3. Reduced-Order Model (ROM)
4. Results and Discussions
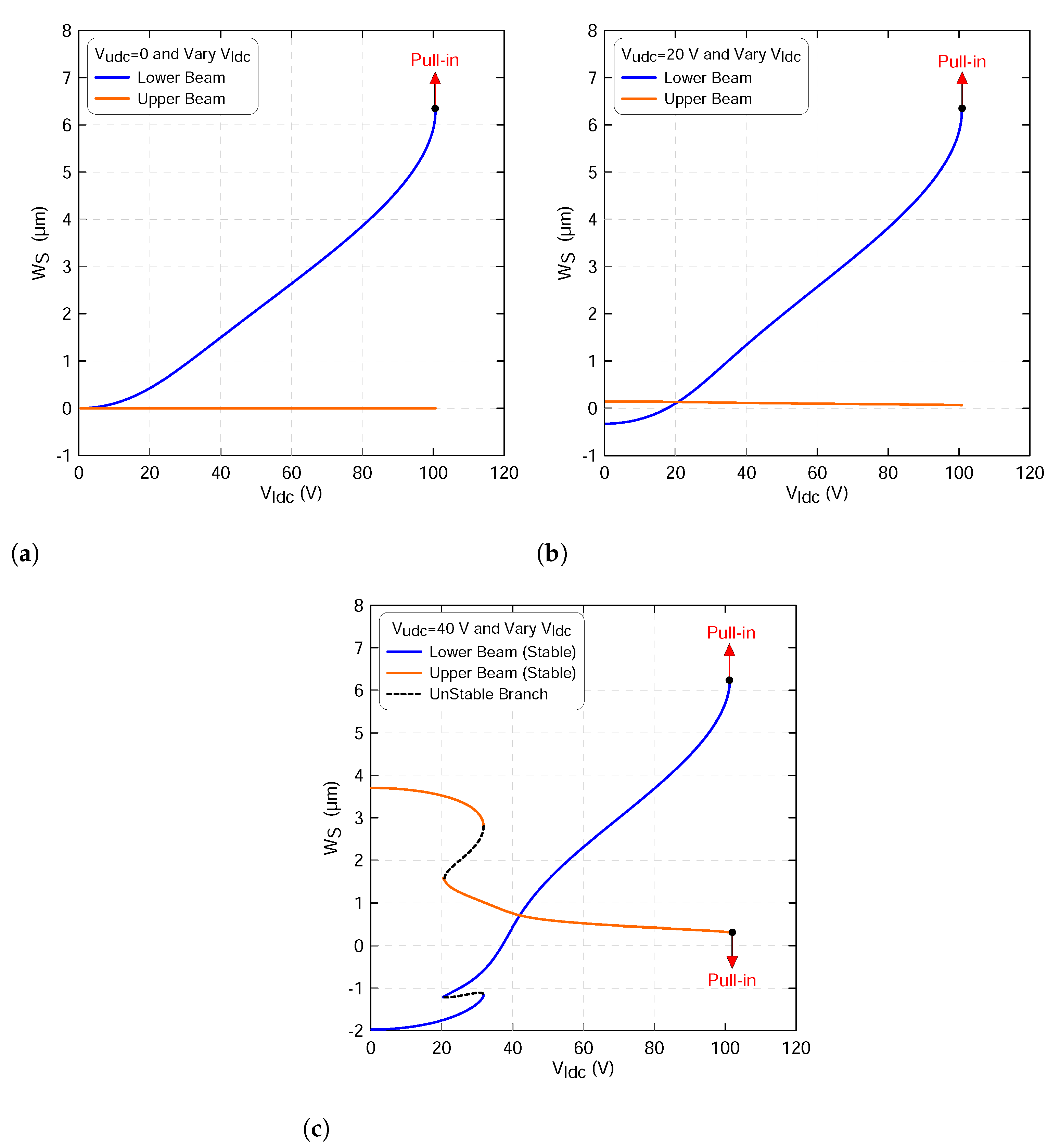
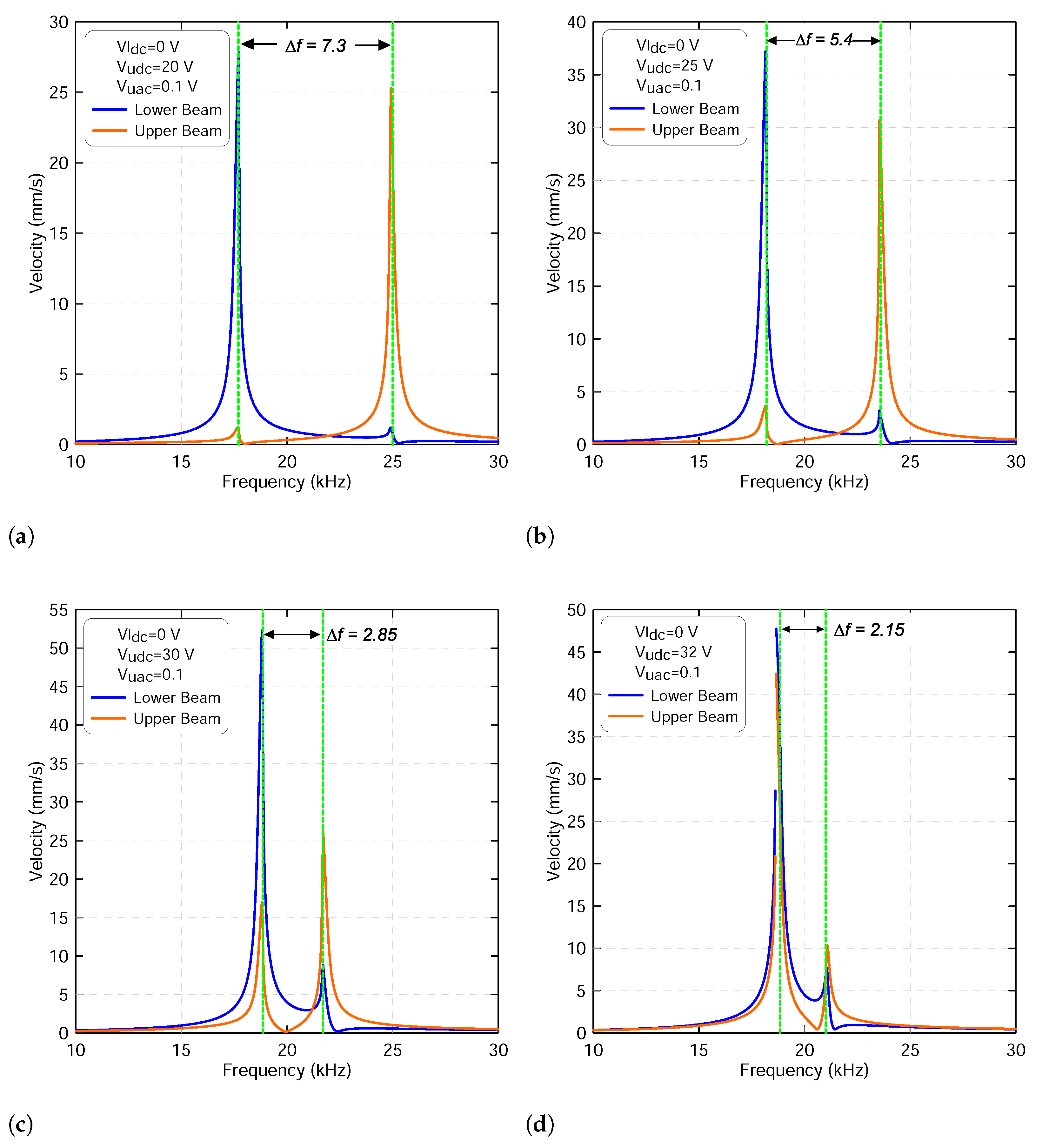
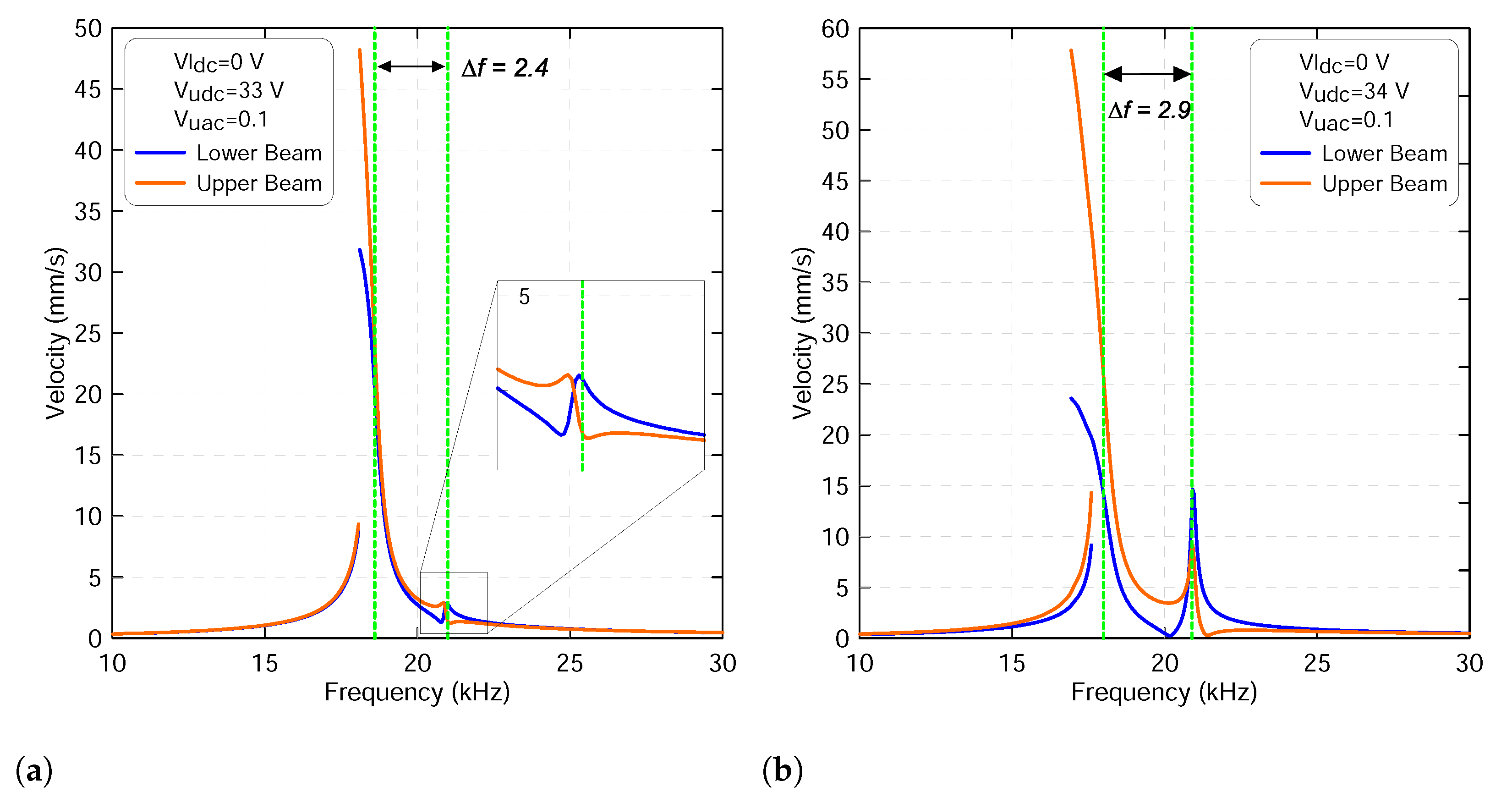
4.1. Case I: Varying Excitation Signal of the Lower Beam
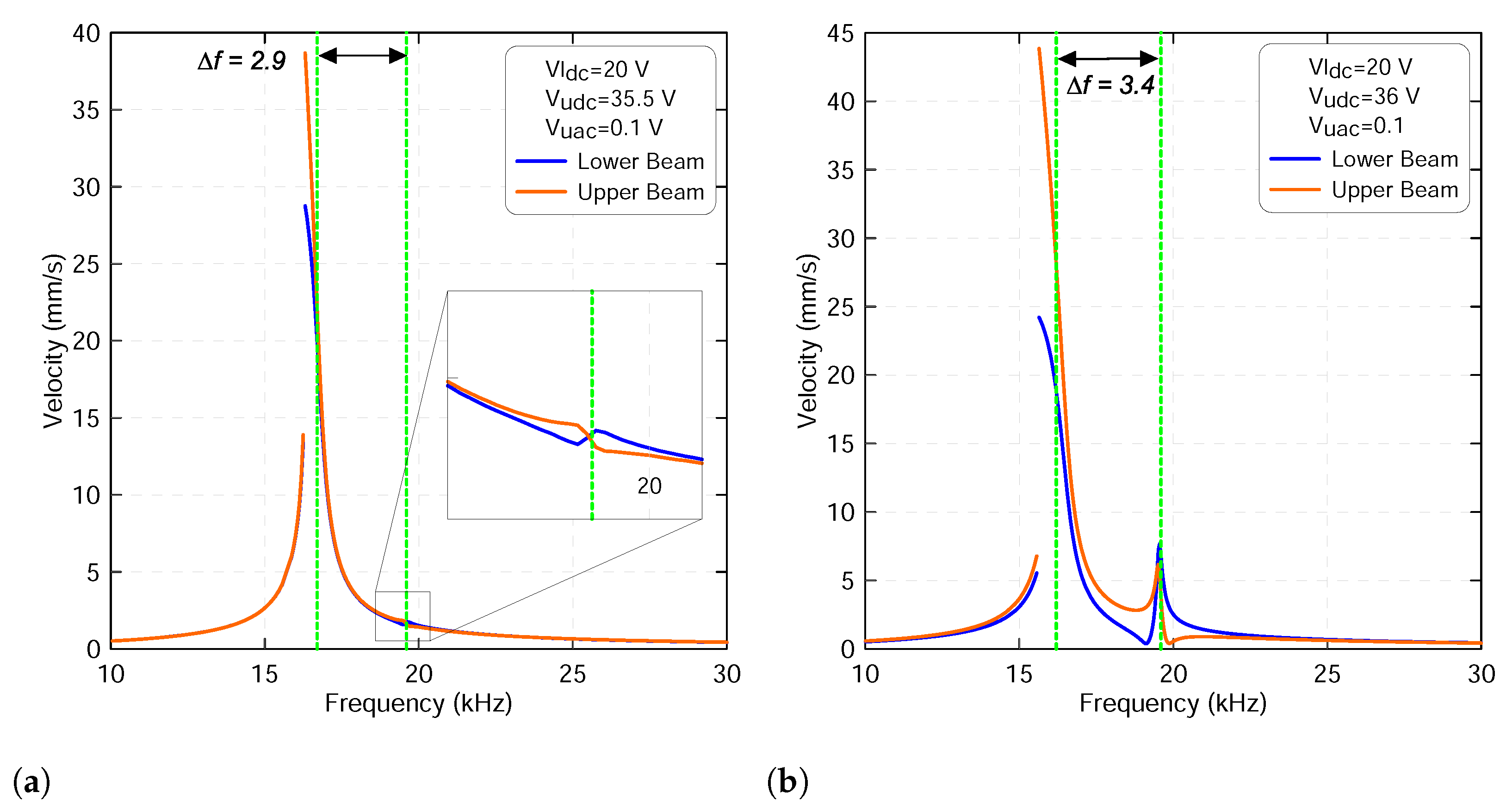
4.2. Case II: Varying Excitation Signal of the Upper Beam
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Senturia, S.D. Microsystem Design; Springer: New York, NY, USA, 2007. [Google Scholar]
- Cowen, A.; Hardy, B.; Mahadevan, R.; Wilcenski, S. PolyMUMPs Design Handbook; Memscap Inc.: Bernin, France, 2011. [Google Scholar]
- Cowen, A.; Hames, G.; Monk., D.; Wilcenski, S.; Hardy, B. SOIMUMPs Design Handbook; Memscap Inc.: Bernin, France, 2014; pp. 2002–2201. [Google Scholar]
- Hsu, T. MEMS & Microsystems: Design, Manufacture, and Nanoscale Engineering, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Chuang, W.C.; Lee, H.L.; Chang, P.Z.; Hu, Y.C. Review on the modeling of electrostatic MEMS. Sensors 2010, 10, 6149–6171. [Google Scholar] [CrossRef] [PubMed]
- Rebeiz, G.; Muldavin, J. RF MEMS switches and switch circuits. IEEE Microw. Mag. 2001, 2, 59–71. [Google Scholar] [CrossRef]
- Bauer, R.; Paterson, A.; Clark, C.; Uttamchandani, D.; Lubeigt, W. Output characteristics of Q-switched solid-state lasers using intracavity MEMS micromirrors. IEEE J. Sel. Top. Quantum Electron. 2014, 21, 356–363. [Google Scholar] [CrossRef] [Green Version]
- Younis, M.; Abdel-Rahman, E.; Nayfeh, A. A reduced-order model for electrostatically actuated microbeam-based MEMS. J. Microelectromech. Syst. 2003, 15, 672–680. [Google Scholar] [CrossRef]
- Yang, S.; Xu, Q. A review on actuation and sensing techniques for MEMS-based microgrippers. J. Micro-Bio Robot. 2017, 13, 1–14. [Google Scholar] [CrossRef]
- Nayfeh, A.; Younis, M.; Abdel-Rahman, E. Dynamic pull-in phenomenon in MEMS resonators. Nonlinear Dyn. 2007, 48, 153–163. [Google Scholar] [CrossRef]
- Krylov, S.; Dick, N. Pull-in dynamics of electrostatically actuated bistable micro beam. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, San Diego, CA, USA, 30 August–2 September 2009; Volume 49033, pp. 635–645. [Google Scholar]
- Krylov, S.; Ilic, B.; Schreiber, D.; Seretensky, S.; Craighead, H. The pull-in behavior of electrostatically actuated bistable microstructures. J. Micromech. Microeng. 2008, 18, 055026. [Google Scholar] [CrossRef]
- Tella, S.; Hajjaj, A.; Younis, M. The effects of initial rise and axial loads on MEMS arches. J. Vib. Acoust. 2017, 139, 040905. [Google Scholar] [CrossRef]
- Hafiz, M.; Kosuru, L.; Ramini, A.; Chappanda, K.; Younis, M. In-plane MEMS shallow arch beam for mechanical memory. Micromachines 2016, 7, 191. [Google Scholar] [CrossRef] [Green Version]
- Alkharabsheh, S.; Younis, M. Statics and dynamics of MEMS arches under axial forces. J. Vib. Acoust. 2013, 135, 191. [Google Scholar] [CrossRef]
- Nayfeh, A.; Emam, S. Exact solution and stability of post buckling configurations of beams. Nonlinear Dyn. 2008, 54, 395–408. [Google Scholar] [CrossRef]
- Alneamy, A.M.; Khater, M.E.; Abdel-Aziz, A.K.; Heppler, G.R.; Abdel-Rahman, E.M. Electrostatic arch micro-tweezers. Int. J. Non-Linear Mech. 2020, 118, 103298. [Google Scholar] [CrossRef]
- Ouakad, H.; Younis, M.; Alsaleem, F.; Miles, R.; Cui, W. The static and dynamic behavior of MEMS arches under electrostatic actuation. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, San Diego, CA, USA, 30 August–2 September 2009; Volume 49033, pp. 607–616. [Google Scholar]
- Medina, L.; Gilat, R.; Krylov, S. Symmetry breaking in an initially curved prestressed micro beam loaded by a distributed electrostatic force. Int. J. Solids Struct. 2014, 51, 2047–2061. [Google Scholar] [CrossRef] [Green Version]
- Ouakad, H.; Younis, M. The dynamic behavior of MEMS arch resonators actuated electrically. Int. J. Non-Linear Mech. 2010, 45, 704–713. [Google Scholar] [CrossRef]
- Lacarbonara, W.; Arafat, H.; Nayfeh, A. Non-linear interactions in imperfect beams at veering. Int. J. Non-Linear Mech. 2005, 40, 987–1003. [Google Scholar] [CrossRef]
- Hajjaj, A.; Alcheikh, N.; Younis, M. The static and dynamic behavior of MEMS arch resonators near veering and the impact of initial shapes. Int. J. Non-Linear Mech. 2017, 95, 277–286. [Google Scholar] [CrossRef] [Green Version]
- Babatain, W.; Bhattacharjee, S.; Hussain, A.M.; Hussain, M.M. Acceleration Sensors: Sensing Mechanisms, Emerging Fabrication Strategies, Materials, and Applications. ACS Appl. Electron. Mater. 2021, 3, 504–531. [Google Scholar] [CrossRef]
- Fang, Z.; Yin, Y.; Chen, C.; Zhang, S.; Liu, Y.; Han, F. A sensitive micromachined resonant accelerometer for moving-base gravimetry. Sens. Actuators Phys. 2021, 325, 112694. [Google Scholar] [CrossRef]
- Comi, C.; Corigliano, A.; Langfelder, G.; Longoni, A.; Tocchio, A.; Simoni, B. A resonant micro accelerometer with high sensitivity operating in an oscillating circuit. J. Microelectromech. Syst. 2010, 19, 1140–1152. [Google Scholar] [CrossRef]
- Ding, H.; Ma, Y.; Guan, Y.; Ju, B.-F.; Xie, J. Duplex mode tilt measurements based on a MEMS biaxial resonant accelerometer. Sens. Actuators Phys. 2019, 296, 222–234. [Google Scholar] [CrossRef]
- Li, L.; Zhang, W.; Wang, J.; Hu, K.; Peng, B.; Shao, M. Bifurcation behavior for mass detection in nonlinear electrostatically coupled resonators. Int. J. Non-Linear Mech. 2019, 119, 103366. [Google Scholar] [CrossRef]
- Xia, C.; Wang, D.F.; Ono, T.; Itoh, T.; Esashi, M. Internal resonance in coupled oscillators—Part II: A synchronous sensing scheme for both mass perturbation and driving force with duffing nonlinearity. Mech. Syst. Signal Process. 2021, 160, 107887. [Google Scholar] [CrossRef]
- Zhang, T.; Ren, J.; Wei, X.; Jiang, Z.; Huan, R. Nonlinear coupling of flexural mode and extensional bulk mode in micromechanical resonators. Appl. Phys. Lett. 2016, 22, 224102. [Google Scholar] [CrossRef]
- Wang, X.; Wei, X.; Pu, D.; Huan, R. Single-electron detection utilizing coupled nonlinear microresonators. Microsyst. Nanoeng. 2020, 6, 78. [Google Scholar] [CrossRef] [PubMed]
- Khaniki, H.B.; Ghayesh, M.H.; Amabili, M. A review on the statics and dynamics of electrostatically actuated nano and micro structures. Int. J. Non-Linear Mech. 2021, 129, 103658. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, J.; Kacem, N.; Tang, B.; Liu, P.; Song, J.; Zhong, H.; Huang, Y. Computational investigation of high-order mode localization in electrostatically coupled microbeams with distributed electrodes for high sensitivity mass sensing. Mech. Syst. Signal Process. 2021, 158, 107781. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, J.; Kacem, N.; Tang, B.; Liu, P.; Song, J.; Zhong, H.; Huang, Y. Design and modeling of a MEMS accelerometer based on coupled mode-localized nonlinear resonators under electrostatic actuation. Commun. Nonlinear Sci. Numer. Simul. 2021, 103, 105960. [Google Scholar] [CrossRef]
- Alcheikh, N.; Ouakad, H.M.; Mbarek, S.B.; Younis, M.I. Crossover/Veering in V-Shaped MEMS Resonators. J. Microelectromech. Syst. 2021, 31, 74–86. [Google Scholar] [CrossRef]
- Ramini, A.; Younis, M.I.; Su, Q.T. A low-g electrostatically actuated resonant switch. Smart Mater. Struct. 2012, 22, 025006. [Google Scholar] [CrossRef]
- Ding, H.; Wu, C.; Xie, J. A MEMS Resonant Accelerometer With High Relative Sensitivity Based on Sensing Scheme of Electrostatically Induced Stiffness Perturbation. J. Microelectromech. Syst. 2020, 30, 32–41. [Google Scholar] [CrossRef]
- Spletzer, M.; Raman, A.; Wu, A.Q.; Xu, X.; Reifenberger, R. Ultrasensitive mass sensing using mode localization in coupled microcantilevers. Appl. Phys. Lett. 2006, 88, 254102. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Li, B.; Yuan, W.; Kraft, M.; Chang, H. An acceleration sensing method based on the mode localization of weakly coupled resonators. J. Microelectromech. Syst. 2016, 25, 286–296. [Google Scholar] [CrossRef]
- Alcheikh, N.; Hajjaj, A.Z.; Younis, M.I. Highly sensitive and wide-range resonant pressure sensor based on the veering phenomenon. Sens. Actuators Phys. 2019, 300, 111652. [Google Scholar] [CrossRef]
- Alcheikh, N.; Mbarek, S.B.; Amara, S.; Younis, M.I. Highly sensitive resonant magnetic sensor based on the veering phenomenon. IEEE Sens. J. 2021, 21, 13165–13175. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, J.; Kacem, N.; Liu, P.; Tang, B.; Xiong, Z.; Wang, H.; Huang, Y. Exploiting nonlinearity to enhance the sensitivity of mode-localized mass sensor based on electrostatically coupled MEMS resonators. Int. J. Non-Linear Mech. 2020, 121, 103455. [Google Scholar] [CrossRef]
- Morozov, N.F.; Indeitsev, D.A.; Igumnova, V.S.; Lukin, A.V.; Popov, I.A.; Shtukin, L.V. Nonlinear dynamics of mode-localized MEMS accelerometer with two electrostatically coupled microbeam sensing elements. Int. J. Non-Linear Mech. 2022, 138, 103852. [Google Scholar] [CrossRef]
- Alneamy, A.; Heidari, N.; Lacarbonara, W.; Abdel-Rahman, E. Single Input–Single Output MEMS Gas Sensor. In Advances in Nonlinear Dynamics; Springer: Cham, Switzerland, 2020; pp. 321–334. [Google Scholar]
- Rabenimanana, T.; Walter, V.; Kacem, N.; Le Moal, P.; Bourbon, G.; Lardies, J. Mass sensor using mode localization in two weakly coupled MEMS cantilevers with different lengths: Design and experimental model validation. Sens. Actuators Phys. 2019, 295, 643–652. [Google Scholar] [CrossRef] [Green Version]
- Ouakad, H.M.; Ilyas, S.; Younis, M.I. Investigating mode localization at Lower-and higher-order modes in mechanically coupled MEMS resonators. J. Comput. Nonlinear Dyn. 2020, 15, 031001. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lower Microbeam | Upper Microbeam | |
|---|---|---|
| Normal Force | ||
| Damping Force | ||
| Mid-plane Stretching | ||
| Electrostatic Force |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alneamy, A.M.; Ouakad, H.M. Investigation into Mode Localization of Electrostatically Coupled Shallow Microbeams for Potential Sensing Applications. Micromachines 2022, 13, 989. https://doi.org/10.3390/mi13070989
Alneamy AM, Ouakad HM. Investigation into Mode Localization of Electrostatically Coupled Shallow Microbeams for Potential Sensing Applications. Micromachines. 2022; 13(7):989. https://doi.org/10.3390/mi13070989
Chicago/Turabian StyleAlneamy, Ayman M., and Hassen M. Ouakad. 2022. "Investigation into Mode Localization of Electrostatically Coupled Shallow Microbeams for Potential Sensing Applications" Micromachines 13, no. 7: 989. https://doi.org/10.3390/mi13070989