
Design of a Magnetically Anchored Laparoscope Using Miniature Ultrasonic Motors


Abstract
:1. Introduction
2. Design of the Ultrasonic Motors
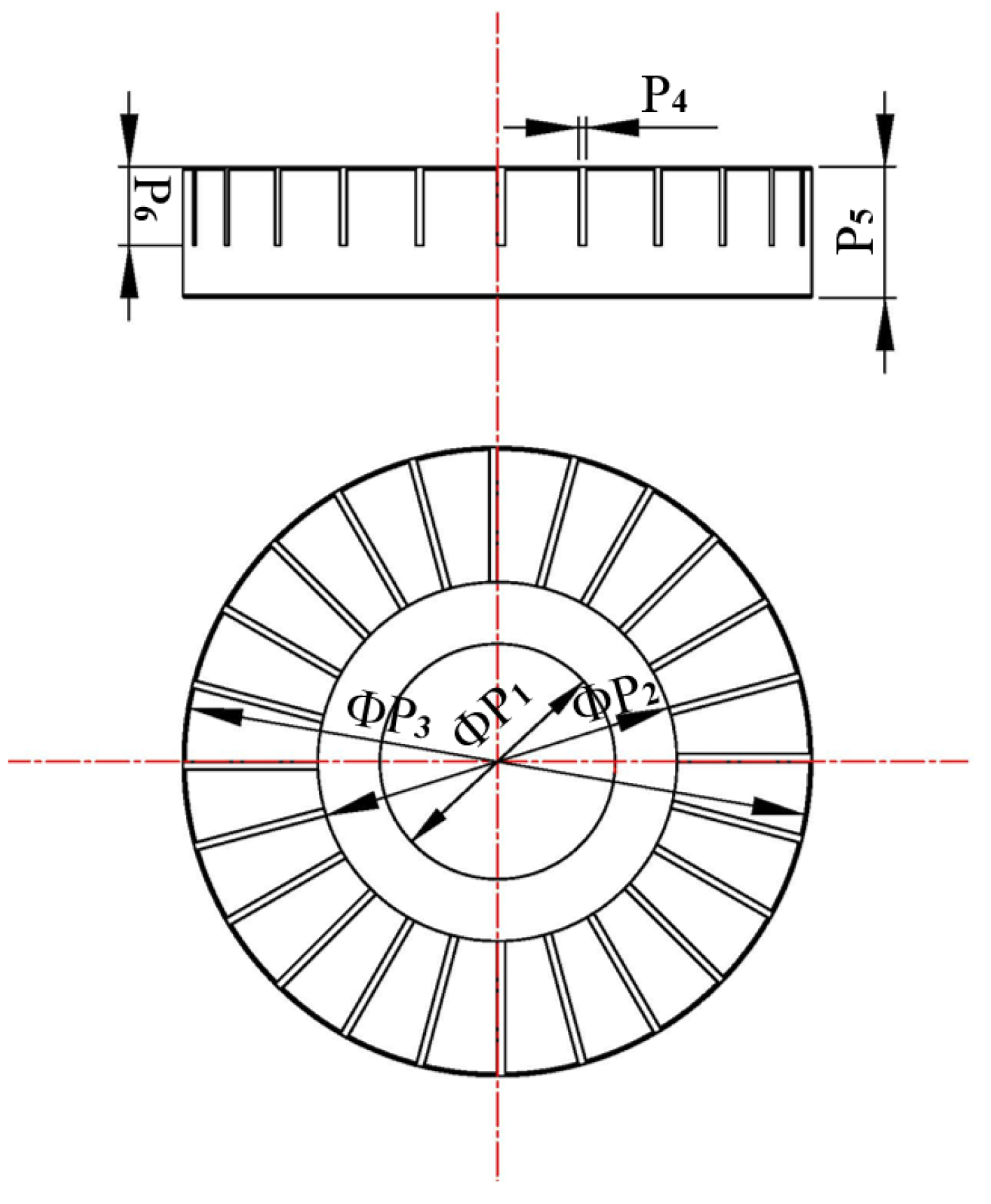
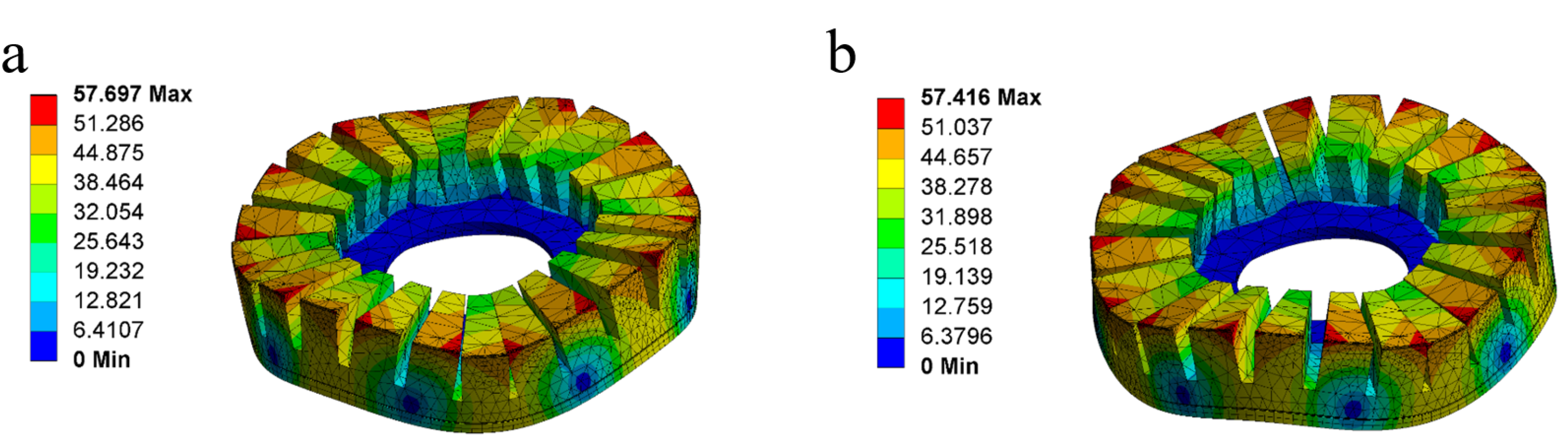
2.1. Design of the Miniature Traveling Wave Rotating Ultrasonic Motor
2.2. Design of the Miniature Traveling Wave Tilt Ultrasonic Motor
3. Design of the Laparoscope
3.1. Magnetically Driven Module
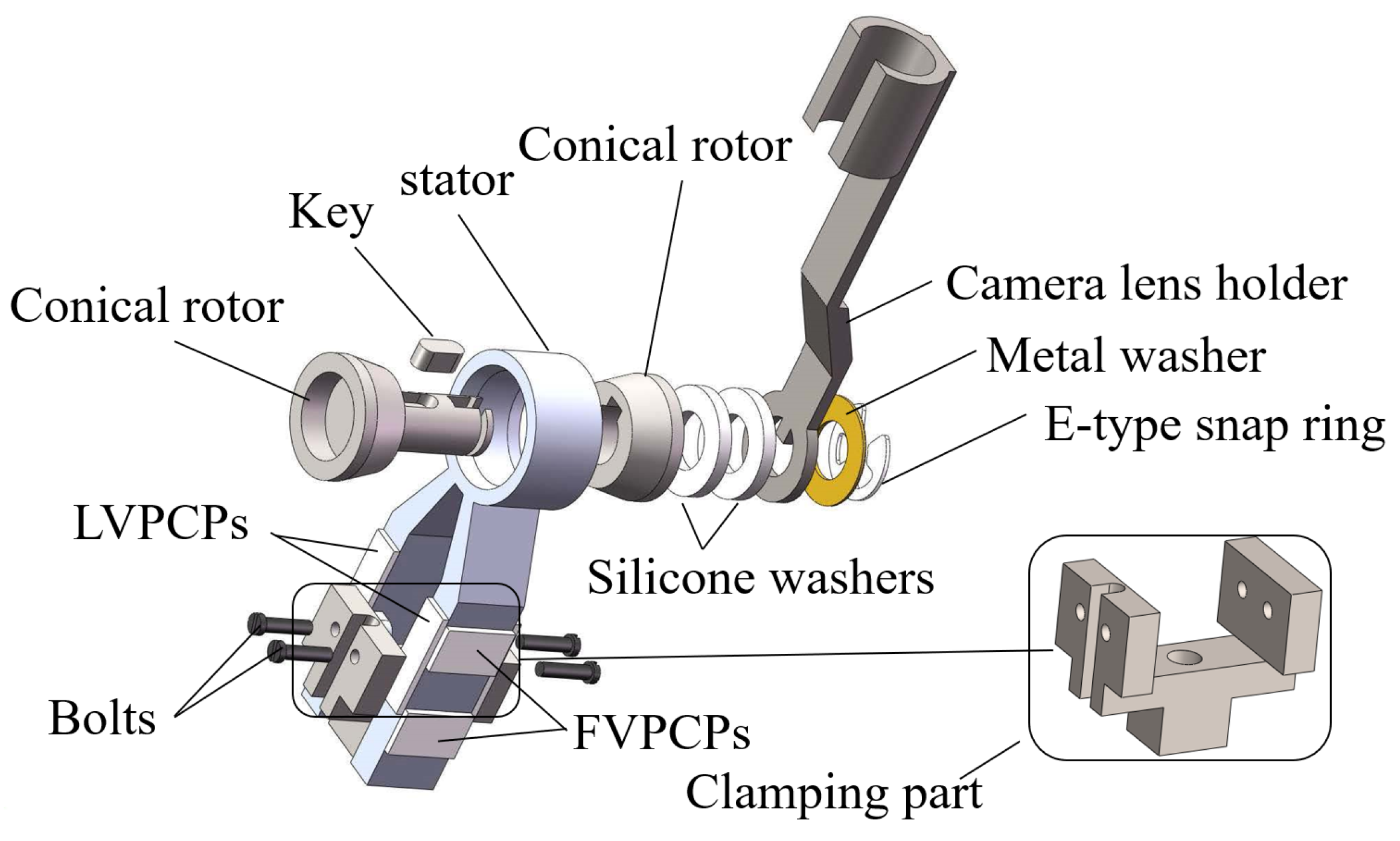
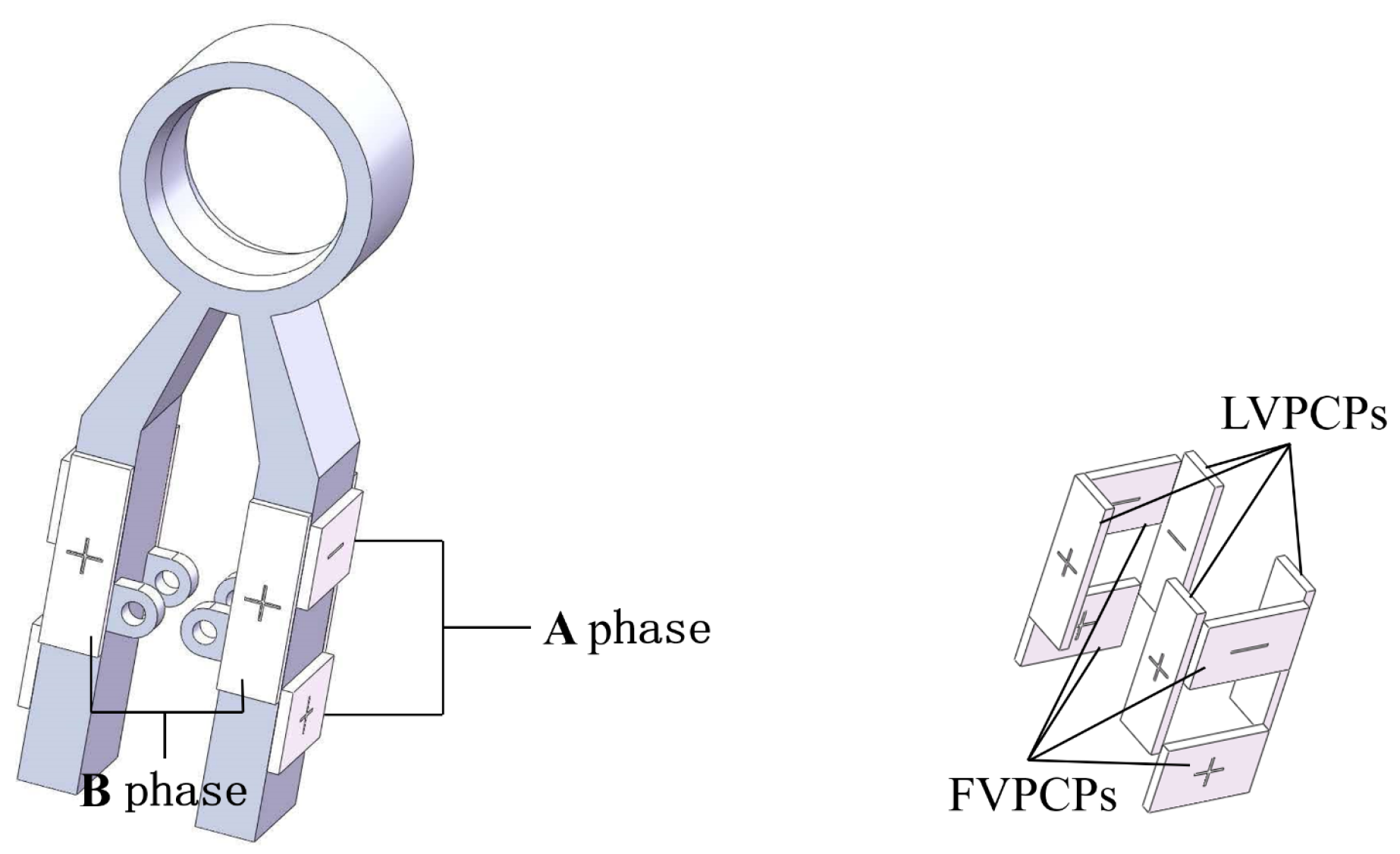
3.2. Ultrasonic Motor Driving Module
3.3. Camera and Lighting Module
4. Control of the Magnetically Anchored Laparoscope
4.1. Motion Control of the Laparoscope
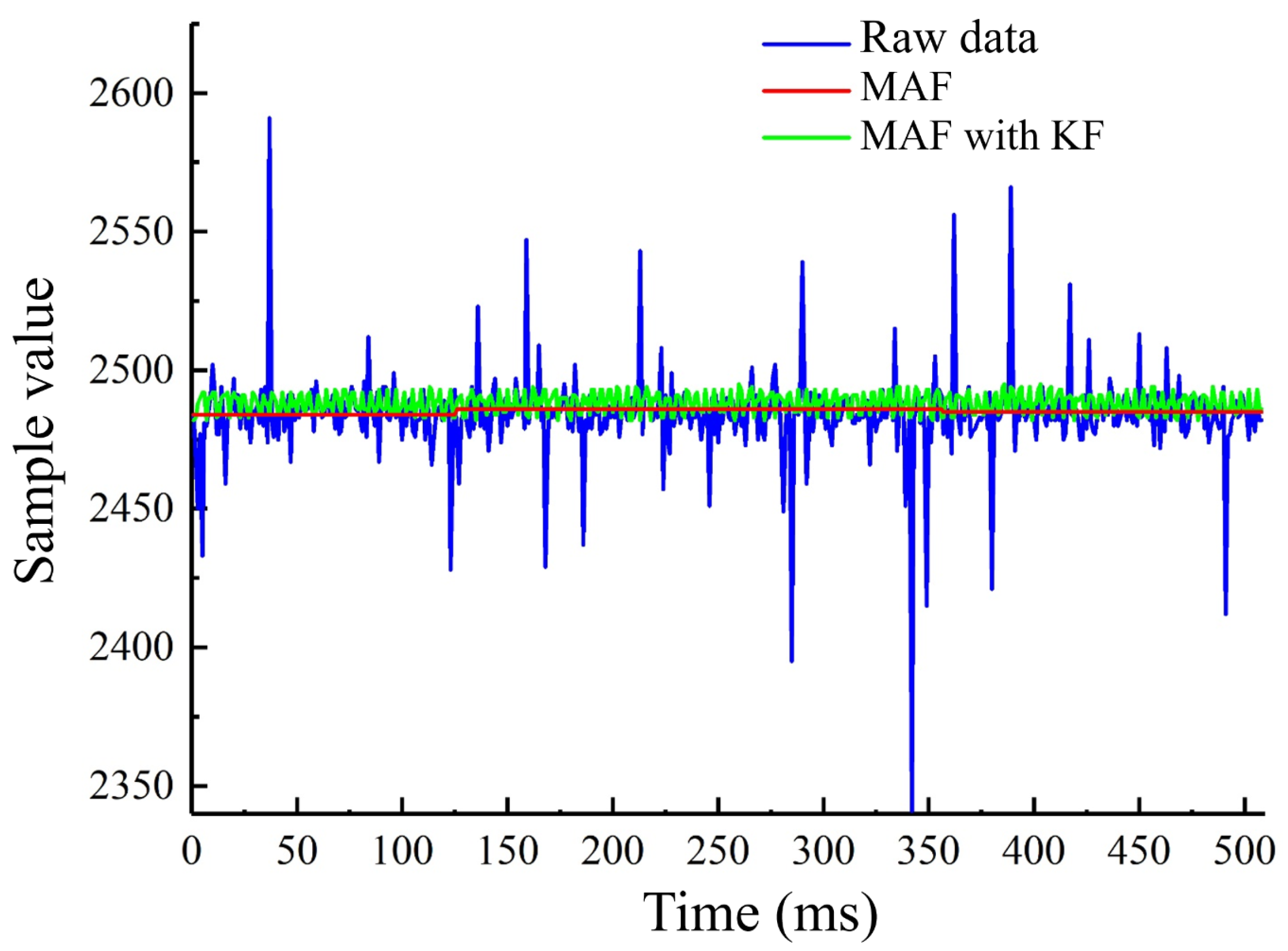
4.2. The Suppression of Control Signal Noise
5. Experiments and Results
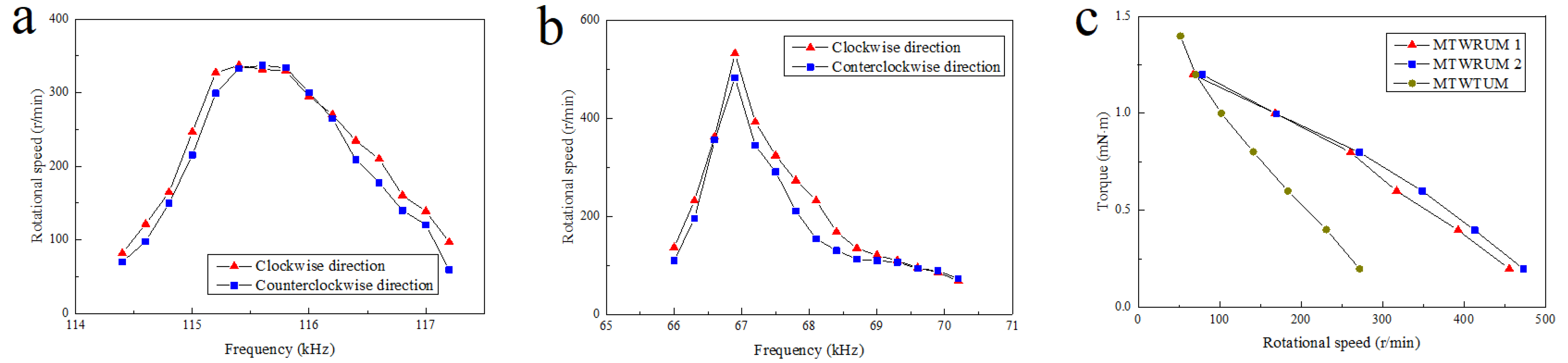
5.1. Torque Output Experiments of the Ultrasonic Motors
5.2. The Movement Experiments of the Laparoscope
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vitiello, V.; Lee, S.L.; Cundy, T.P.; Yang, G. Emerging robotic platforms for minimally invasive surgery. IEEE Rev. Biomed. Eng. 2013, 6, 111–126. [Google Scholar] [CrossRef] [PubMed]
- Kateryna, K.Z.; Wu, C.Y.; Song, K.T. A study on speech recognition control for a surgical robot. IEEE Trans. Ind. Inform. 2017, 13, 607–615. [Google Scholar]
- Brodie, A.; Vasdev, N. The future of robotic surgery. Ann. R. Coll. Surg. Engl. 2018, 100, 4–13. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Feng, B.; Zheng, M.; Xu, K. Surgical robots for SPL and NOTES: A review. Minim. Invasiv. Ther. 2015, 24, 8–17. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, S.; Wu, Z.; Yang, B.; Luo, Q.; Xu, K. Review of surgical robotic systems for keyhole and endoscopic procedures: State of the art and perspectives. Front. Med. 2020, 14, 382–403. [Google Scholar] [CrossRef]
- Orekhov, A.L.; Abah, C.; Simaan, N. Snake-like robots for minimally invasive, single port, and intraluminal surgeries. Encycl. Med. Robot. 2018, 1, 203–243. [Google Scholar]
- Kaouk, J.H.; Haber, G.P.; Autorino, R.; Crouzet, S.; Ouzzane, A.; Flaman, V.; Villers, A. A novel robotic system for single-port urologic surgery: First clinical investigation. Eur. Urol. 2014, 66, 1033–1043. [Google Scholar] [CrossRef]
- Liu, X.; Abdolmalaki, R.Y.; Zuo, T.; Guan, Y.; Mancini, G.J.; Tan, J. Transformable in vivo robotic laparoscopic camera with optimized illumination system for single-port access surgery: Initial prototype. IEEE-ASME Trans. Mech. 2018, 23, 1585–1595. [Google Scholar] [CrossRef]
- Rao, P.P.; Rao, P.P.; Bhagwat, S. Single-incision laparoscopic surgery—Current status and controversies. J. Minim. Access Surg. 2011, 7, 1585–1595. [Google Scholar] [CrossRef]
- Cassera, M.A.; Goers, T.A.; Spaun, G.O.; Swanström, L.L. Efficacy of using a novel endoscopic lens cleaning device: A prospective randomized controlled trial. J. Minim. Access Surg. 2011, 18, 150–155. [Google Scholar] [CrossRef]
- Park, S.; Bergs, R.A.; Eberhart, R.; Baker, L.; Fernandez, R.; Cadeddu, J.A. Trocar-less instrumentation for laparoscopy. Ann. Surg. 2007, 245, 379–384. [Google Scholar] [CrossRef] [PubMed]
- Tortora, G.; Salerno, M.; Ranzani, T.; Tognarelli, S.; Dario, P.; Menciassi, A. A modular magnetic platform for natural orifice transluminal endoscopic surgery. In Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Osaka, Japan, 3–7 July 2013; pp. 6265–6268. [Google Scholar]
- Platt, S.R.; Hawks, J.A.; Rentschler, M.E. Vision and task assistance using modular wireless in vivo surgical robots. IEEE Trans. Bio-Med. Eng. 2009, 56, 1700–1710. [Google Scholar] [CrossRef] [PubMed]
- Karimi, M.; Ghidary, S.S.; Shekhar, R.; Kane, T.D.; Monfaredi, R. Magnetically anchored pan-tilt stereoscopic robot with optical-inertial stabilization for minimally invasive surgery. In Proceedings of the 2019 SPIE Medical Imaging, San Diego, CA, USA, 16–21 February 2019; pp. 109511E1–109511E6. [Google Scholar]
- Feng, H.; Dong, D.; Ma, T.; Zhuang, J.; Fu, Y.; Lv, Y.; Li, L. Development of an in vivo visual robot system with a magnetic anchoring mechanism and a lens cleaning mechanism for laparoendoscopic single-site surgery (LESS). Int. J. Med. Robot. Comput. Assist. Surg. 2017, 13, e1791. [Google Scholar] [CrossRef] [PubMed]
- Yazdanpanah, A.R.; Liu, X.; Li, N.; Tan, J. A novel laparoscopic camera robot with in-vivo lens cleaning and debris prevention modules. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3669–3674. [Google Scholar]
- Liu, X.; Yazdanpanah, A.R.; Zuo, T.; Guan, Y.; Mancini, G.J.; Tan, J. Design and test of an in-vivo robotic camera integrated with optimized illumination system for single-port laparoscopic surgery. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–26 May 2018; pp. 1392–1397. [Google Scholar]
- Liu, X.; Liu, H.; Tan, J. Towards a generic in vivo in situ camera lens cleaning module for robotic surgery. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 6290–6295. [Google Scholar]
- Cadeddu, J.; Fernandez, R.; Desai, M.; Bergs, R.; Tracy, C.; Tang, S.; Tang, S.J.; Rao, P.; Desai, M.; Scott, D. Novel magnetically guided intra-abdominal camera to facilitate laparoendoscopic single-site surgery: Initial human experience. Surg. Endosc. 2009, 23, 1894–1899. [Google Scholar] [CrossRef]
- Liu, X.; Mancini, G.J.; Guan, Y.; Tan, J. Design of a magnetic actuated fully insertable robotic camera system for single-incision laparoscopic surgery. IEEE/ASME Trans. Mech. 2016, 21, 1966–1976. [Google Scholar] [CrossRef]
- Li, N.; Yazdanpanah, A.R.; Mancini, G.J.; Tan, J. Initial design and results of an untethered insertable laparoscopic robotic surgical camera system. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 949–954. [Google Scholar]
- Cheng, T.; Li, W.; Ng, W.Y.; Huang, Y.; Li, J.; Ng, C.S.H.; Chiu, P.W.Y.; Li, Z. Deep learning assisted robotic magnetic anchored and guided endoscope for real-time instrument tracking. IEEE Rob. Autom. Lett. 2021, 6, 3979–3986. [Google Scholar] [CrossRef]
- Garbin, N.; Slawinski, P.R.; Aiello, G.; Karraz, C.; Valdastri, P. Laparoscopic camera based on an orthogonal magnet arrangement. IEEE Rob. Autom. Lett. 2016, 1, 924–929. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Cheng, T.; Ye, M.; Ng, C.S.H.; Chiu, P.W.Y.; Li, Z. Kinematic modeling and visual servo control of a soft-bodied magnetic anchored and guided endoscope. IEEE-ASME Trans. Mech. 2020, 25, 1531–1542. [Google Scholar] [CrossRef]
- Wei, H.; Li, K.; Xu, D.; Tan, W. Design of a raparoscopic robot system based on spherical magnetic field. Appl. Sci. 2019, 9, 2070. [Google Scholar] [CrossRef] [Green Version]
- Gu, H.; Bain, M.; Yen, C.J.; Fang, S.; Leong, F.; Mohammadi, A.; Valdastri, P.; Oetomo, D. Local magnetic actuation based laparoscopic camera for minimally invasive surgery. In Proceedings of the 2015 Australasian Conference on Robotics and Automation, Canberra, Australia, 2–4 December 2015. [Google Scholar]
- Ueha, S. Ultrasonic Motors Theory and Applications; Oxford Science Publications: Oxford, UK, 1993. [Google Scholar]
- Maeno, T.; Tsukimoto, T.; Miyake, A. Finite-element analysis of the rotor/stator contact in a ring-type ultrasonic motor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1992, 39, 668–674. [Google Scholar] [CrossRef]
- Yang, X.; Liu, Y.; Chen, W.; Liu, J. A cylindrical traveling wave ultrasonic motor using bonded-type composite beam. Ultrasonics 2016, 65, 277–281. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Shi, Y.; Zhang, J.; Wang, J. Novel linear piezoelectric motor for precision position stage. Chin. J. Mech. Eng. 2016, 29, 378–385. [Google Scholar] [CrossRef]
- Ho, S.T.; Jan, S.J. A piezoelectric motor for precision positioning applications. Precis. Eng. 2016, 43, 285–293. [Google Scholar] [CrossRef]
- Tsai, T.H.; Potsaid, B.; Tao, Y.K. Ultrahigh speed endoscopic optical coherence tomography using micromotor imaging catheter and VCSEL technology. Biomed. Opt. Express. 2013, 4, 1119–1132. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Watson, B.; Friend, J.; Yeo, L. Modelling and testing of a piezoelectric ultrasonic micro-motor suitable for in vivo micro-robotic applications. J. Micromech. Microeng. 2010, 20, 115018. [Google Scholar] [CrossRef]
- Watson, B.; Friend, J.; Yeo, L. Micromotor of less than 1 mm3 volume for in vivo medical procedures. In Proceedings of the 2009 Third International Conference on Quantum, Nano and Micro Technologies, Cancum, Moxico, 1–7 February 2009; pp. 81–85. [Google Scholar]
- Rogers, G.W. Piezoelectric ultrasonic micro-motor system for minimally invasive surgery-the Intellimotor. In Proceedings of the 2011 International Congress on Ultrasonics, Gdansk, Poland, 5–8 September 2011; pp. 705–708. [Google Scholar]
- Nakamura, K. Ultrasonic Transducers; Woodhead Publishing Limited: Cambridge, UK, 2012. [Google Scholar]
- Kiong, T.K.; Liang, W.; Huang, S.; Pham, L.P.; Chen, S.; Wee, G.C.; Yee, L.H. Precision control of piezoelectric ultrasonic motor for myringotomy with tube insertion. J. Dyn. Syst. Meas. Control 2015, 137, 064504. [Google Scholar] [CrossRef]
- Delibas, B.; Koc, B.; Thielager, J.; Stiebel, C. A novel drive and control method for piezoelectric motors in microscopy stages. In Proceedings of the 21st International Conference of the European Society for Precision Engineering and Nanotechnology, Online, 7–10 June 2021; pp. 251–254. [Google Scholar]
- Chen, T.; Zhang, N.; Huo, T.; Wang, C.; Zheng, J.; Zhou, T.; Xue, P. Tiny endoscopic optical coherence tomography probe driven by a miniaturized hollow ultrasonic motor. J. Biomed. Opt. 2013, 18, 086011. [Google Scholar] [CrossRef]
- Wu, J.; Mizuno, Y.; Nakamura, K. A rotary ultrasonic motor operating in torsional/bending modes with high torque density and high power density. IEEE Trans. Ind. Electron. 2021, 68, 6109–6120. [Google Scholar] [CrossRef]
- Zhou, Y.; Chang, J.; Liao, X.; Feng, Z. Ring-shaped traveling wave ultrasonic motor for high-output power density with suspension stator. Ultrasonics 2020, 102, 106040. [Google Scholar] [CrossRef]
- Lu, X.; Hu, J.; Yang, L.; Zhao, C. A novel dual stator-ring rotary ultrasonic motor. Sens. Actuator A Phys. 2013, 189, 504–511. [Google Scholar] [CrossRef]
- Lu, X.; Hu, J.; Yang, L.; Zhao, C. A cylindrical traveling wave ultrasonic motor using longitudinal vibration transducers. Ferroelectrics 2010, 409, 117–127. [Google Scholar] [CrossRef]
- Chen, W.; Shi, S.; Liu, Y.; Li, P. A new traveling wave ultrasonic motor using thick ring stator with nested PZT excitation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 1160–1168. [Google Scholar] [CrossRef] [PubMed]
- Uchino, K.; Cagatay, S.; Koc, B.; Dong, S.; Bouchilloux, P.; Strauss, M. Micro piezoelectric ultrasonic motors. J. Electroceram. 2004, 13, 393–401. [Google Scholar] [CrossRef] [Green Version]
- Milad, M.P.; Terkildsen, M.F. The spinal needle test effectively measures abdominal wall thickness before cannula placement at laparoscopy. J. Am. Assoc. Gynecol. Laparosc. 2002, 9, 514–518. [Google Scholar] [CrossRef]
- Leong, F.; Mohammadi, A.; Tan, Y.; Thiruchelvam, D.; Valdastri, P.; Oetomo, D. Dynamics of insufflated abdominal wall tissue for magnetically anchored surgical instruments. arXiv Prepr. 2018, arXiv:1806.09067. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Young’s Modulus (Gpa) | Poisson’s Ratio | Density () |
|---|---|---|---|
| Aluminum alloy | 73 | 0.33 | 2900 |
| PZT-8 | / | / | 7600 |
| Parameters | P1 | P2 | P3 | P4 | P5 | P6 |
|---|---|---|---|---|---|---|
| Numerical value (mm) | 4.5 | 6.9 | 12 | 0.3 | 2 | 1.5 |
| Parameters | P1 (mm) | P2 (mm) | P3 (mm) | P4 (mm) | P5 () | P6 (mm) | P7 (mm) | P8 (mm) |
|---|---|---|---|---|---|---|---|---|
| Numerical value | 7.5 | 10.5 | 5 | 2.8 | 36 | 15.5 | 55.4 | 3.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Sun, Z.; Yan, H.; Chen, J. Design of a Magnetically Anchored Laparoscope Using Miniature Ultrasonic Motors. Micromachines 2022, 13, 855. https://doi.org/10.3390/mi13060855
Li J, Sun Z, Yan H, Chen J. Design of a Magnetically Anchored Laparoscope Using Miniature Ultrasonic Motors. Micromachines. 2022; 13(6):855. https://doi.org/10.3390/mi13060855
Chicago/Turabian StyleLi, Jingwu, Zhijun Sun, He Yan, and Jinyan Chen. 2022. "Design of a Magnetically Anchored Laparoscope Using Miniature Ultrasonic Motors" Micromachines 13, no. 6: 855. https://doi.org/10.3390/mi13060855