
Enhancing Part-to-Part Repeatability of Force-Sensing Resistors Using a Lean Six Sigma Approach

 ,
, 
Abstract
:1. Introduction
2. Theoretical Foundations
2.1. Application of the Six Sigma Methodology
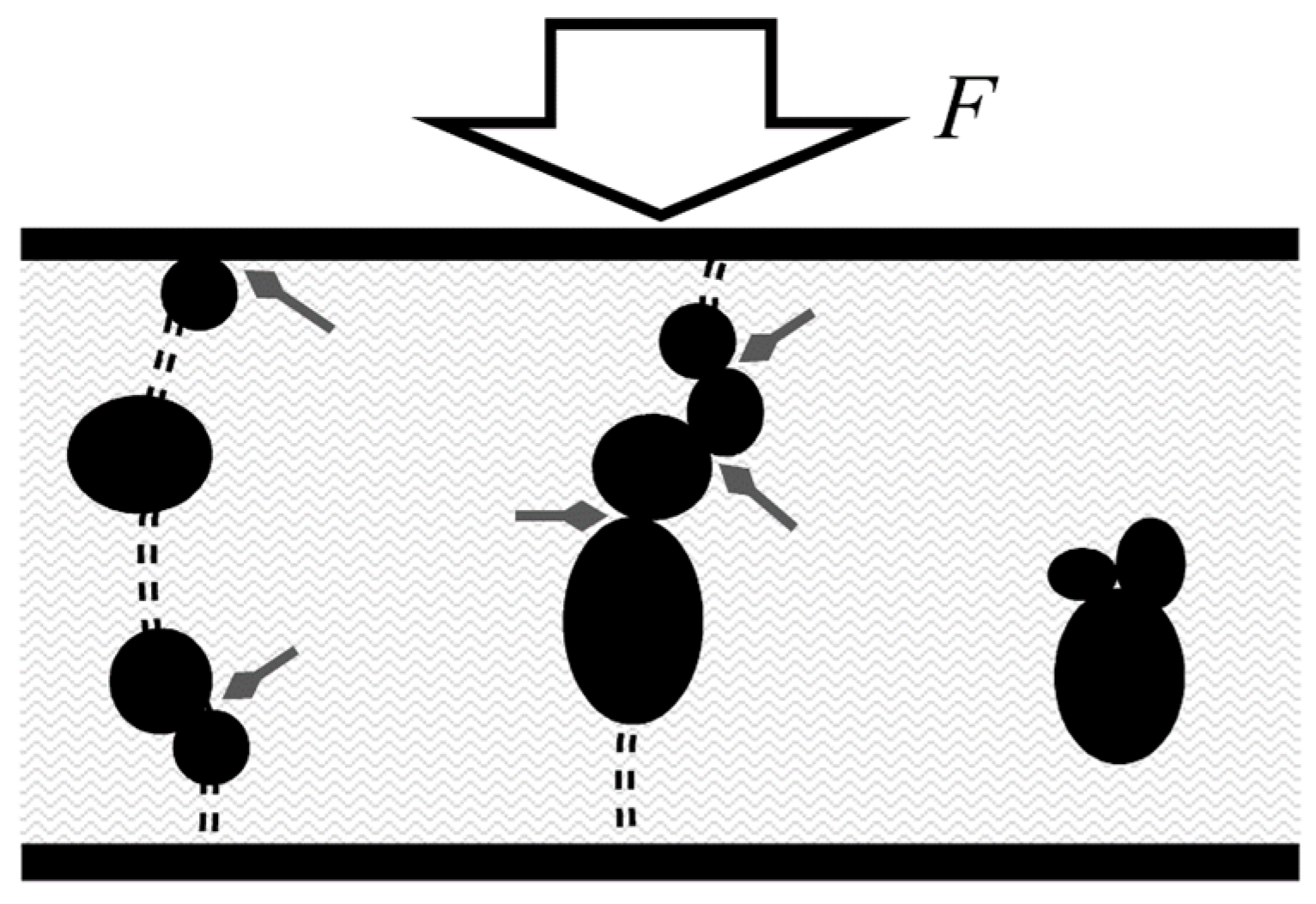
2.2. Physical Modeling of Force-Sensing Resistors
2.2.1. Quantum Tunneling as a Source of Piezoresistivity
2.2.2. Constriction Resistance as a Source of Piezoresistivity
2.2.3. Combining Tunneling and Contact Resistances
3. Materials and Methods
3.1. Mechanical Setup
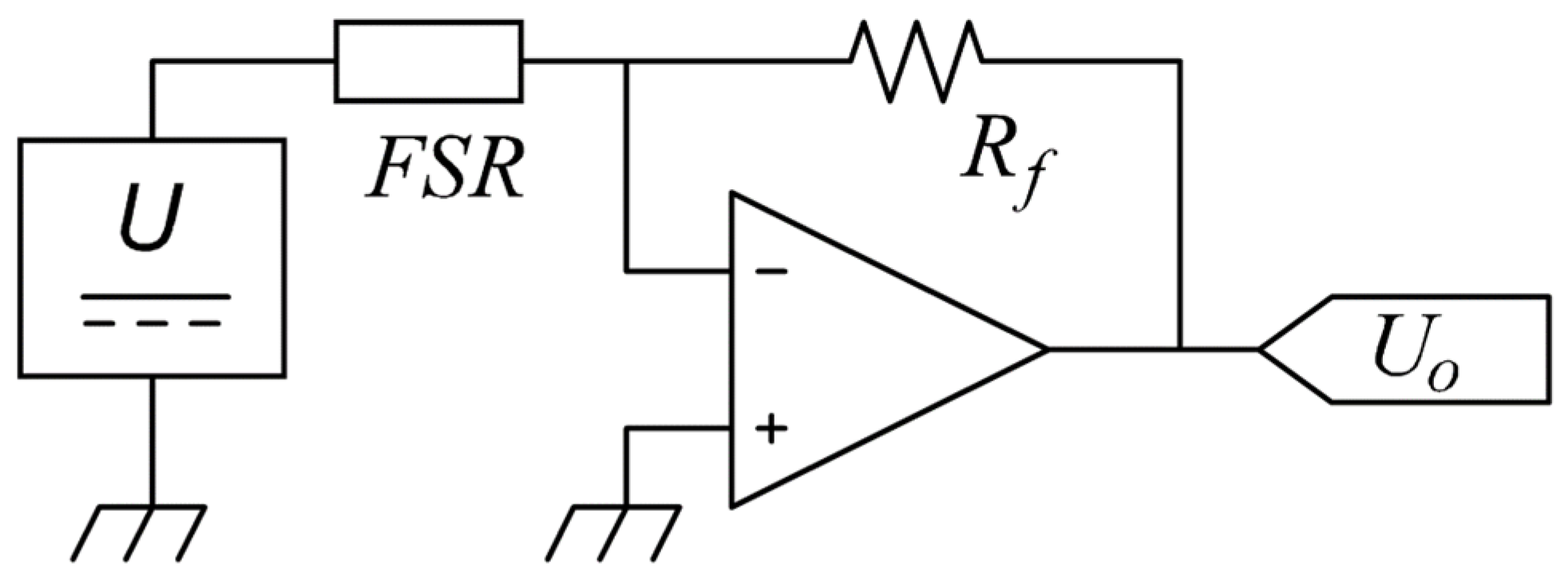
3.2. Electrical Setup
3.3. Methods
4. Results
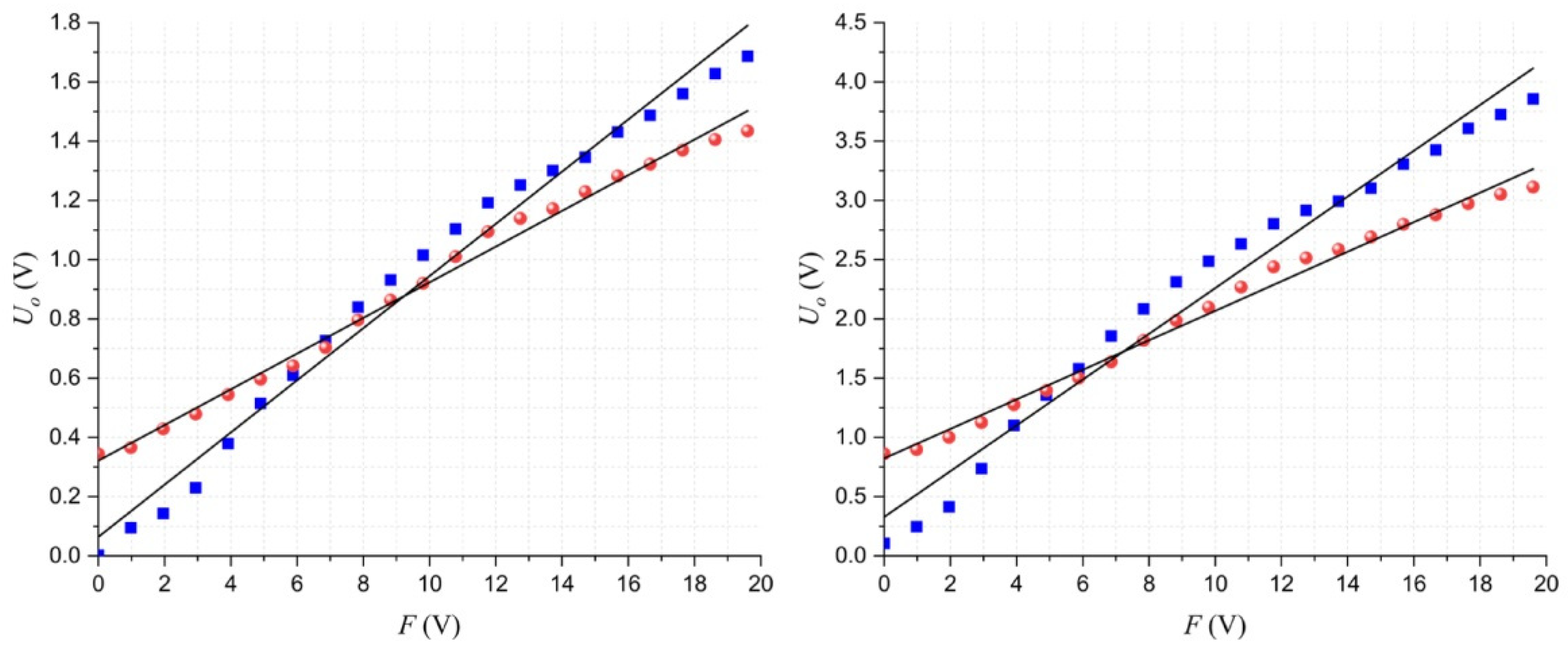
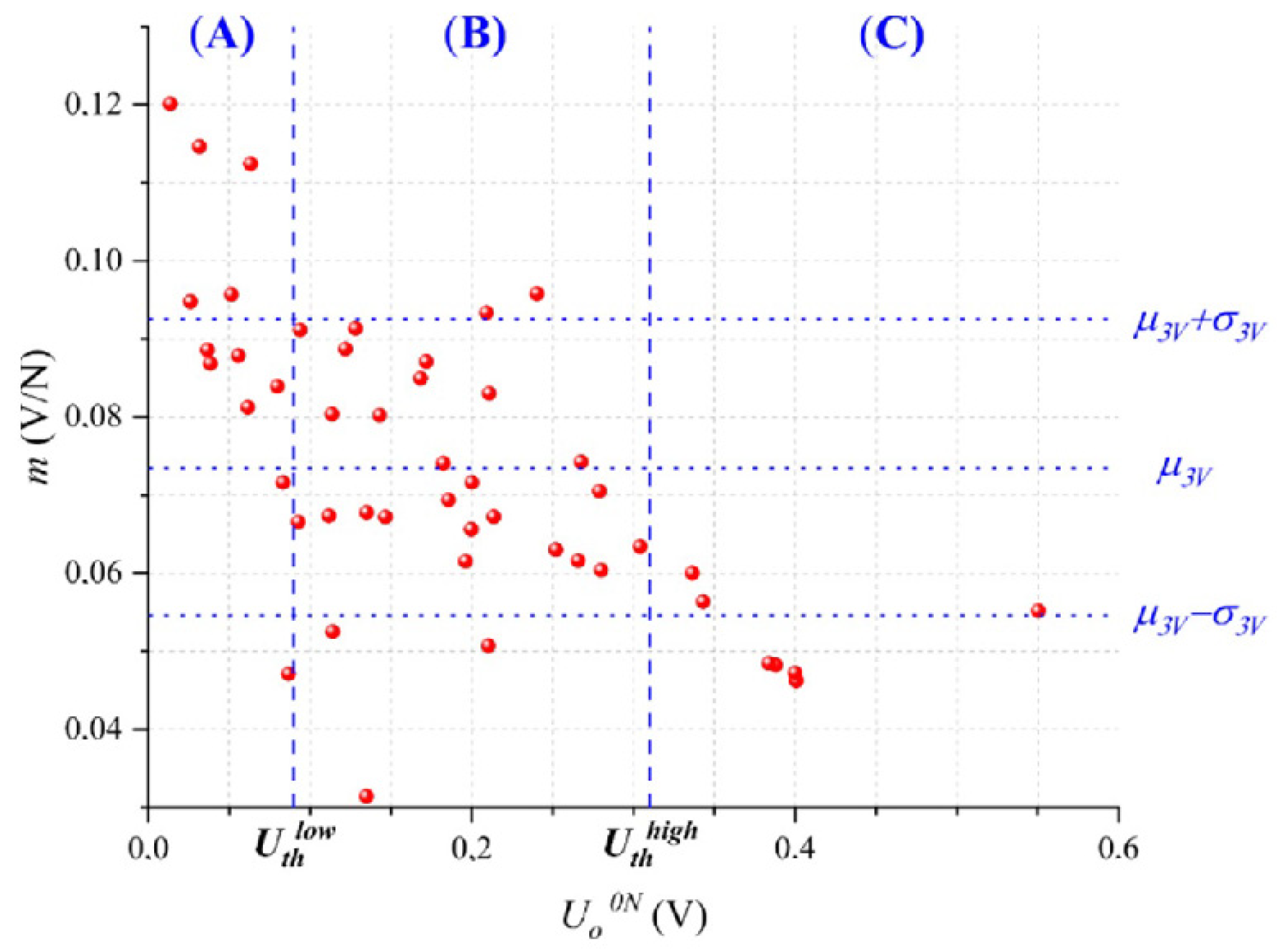
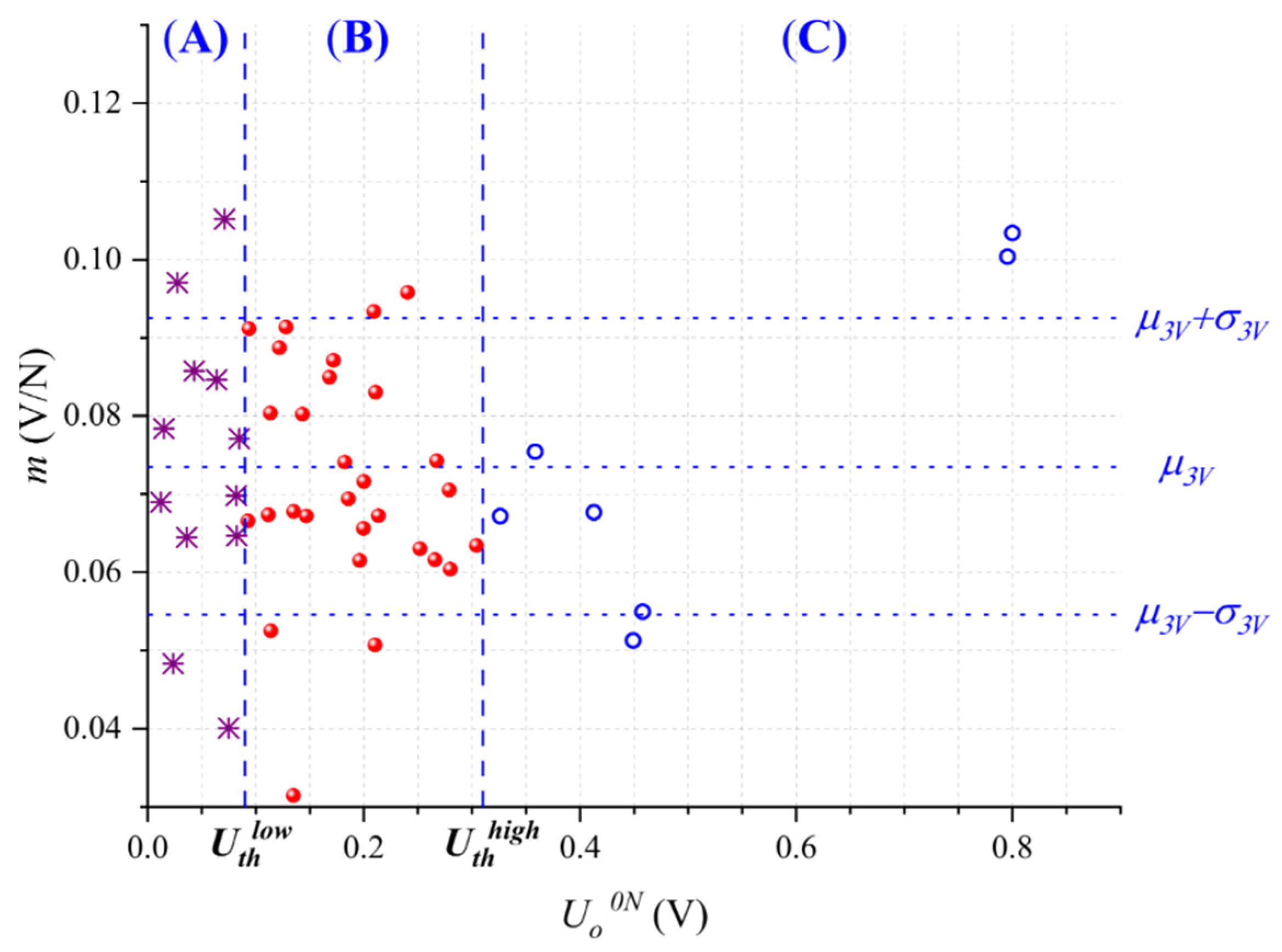
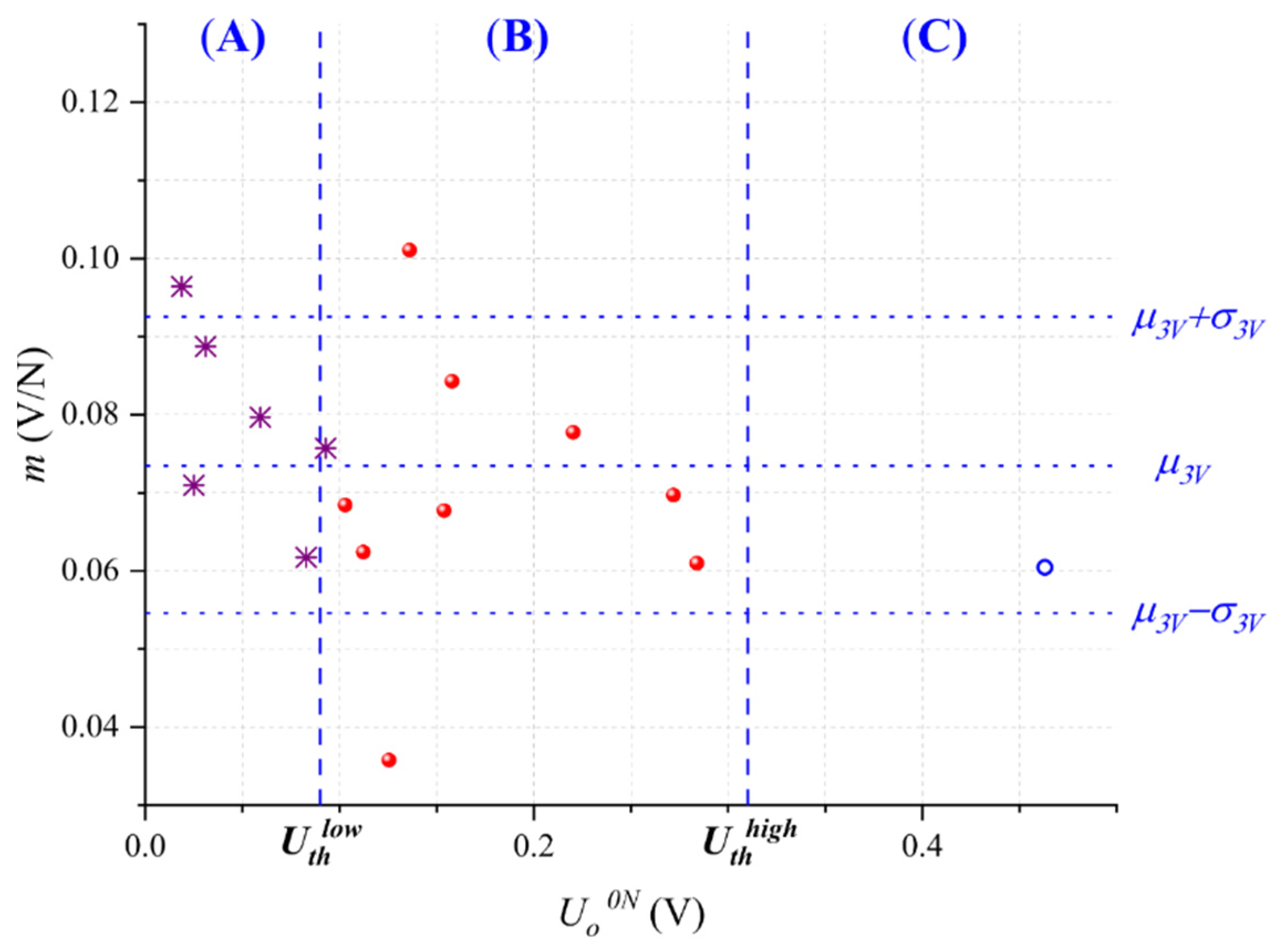
4.1. Sensor Classification on the Basis of the Output Voltage at Null Force
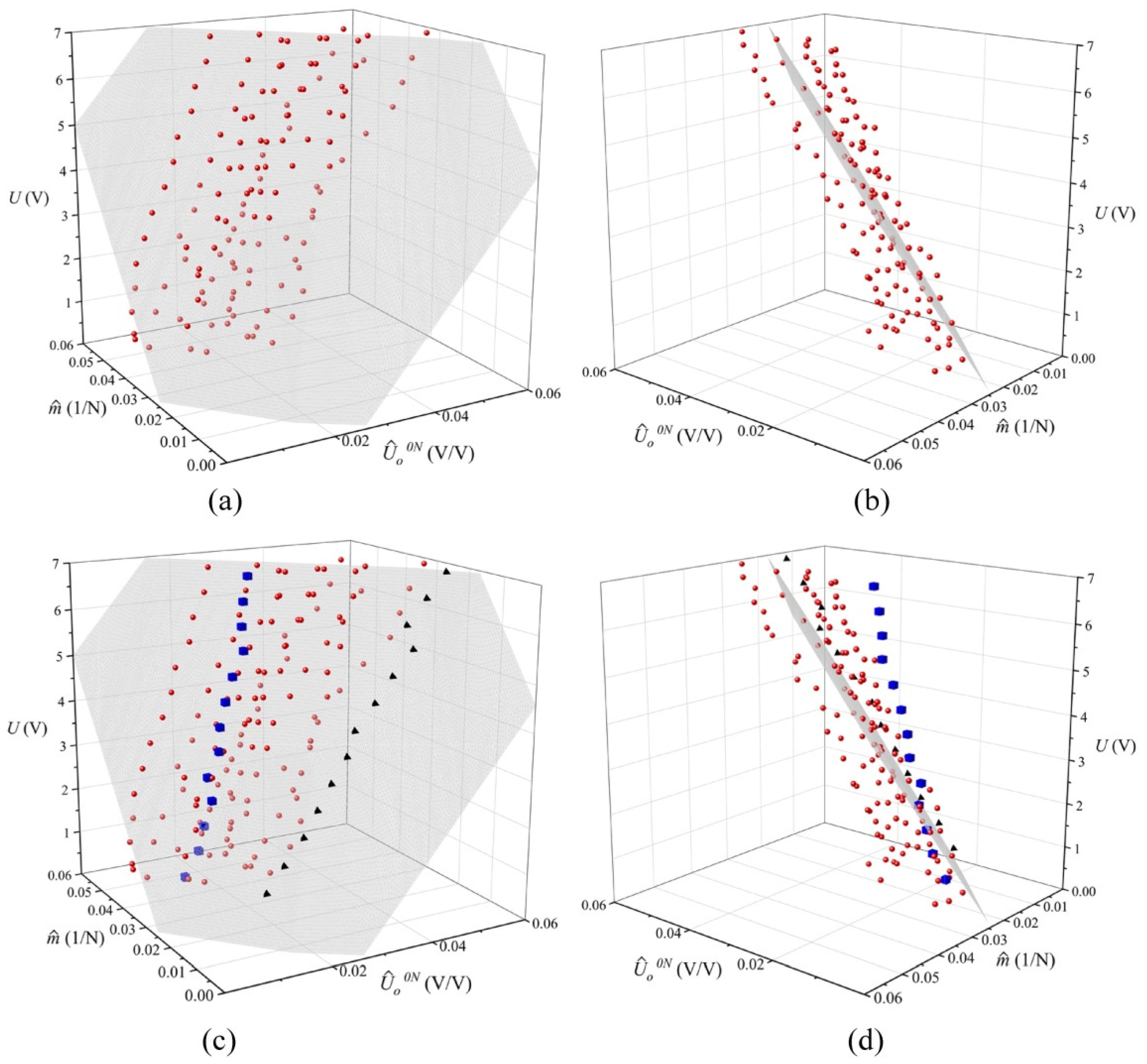
4.2. Compensation Technique to Enhance Part-to-Part Repeatability
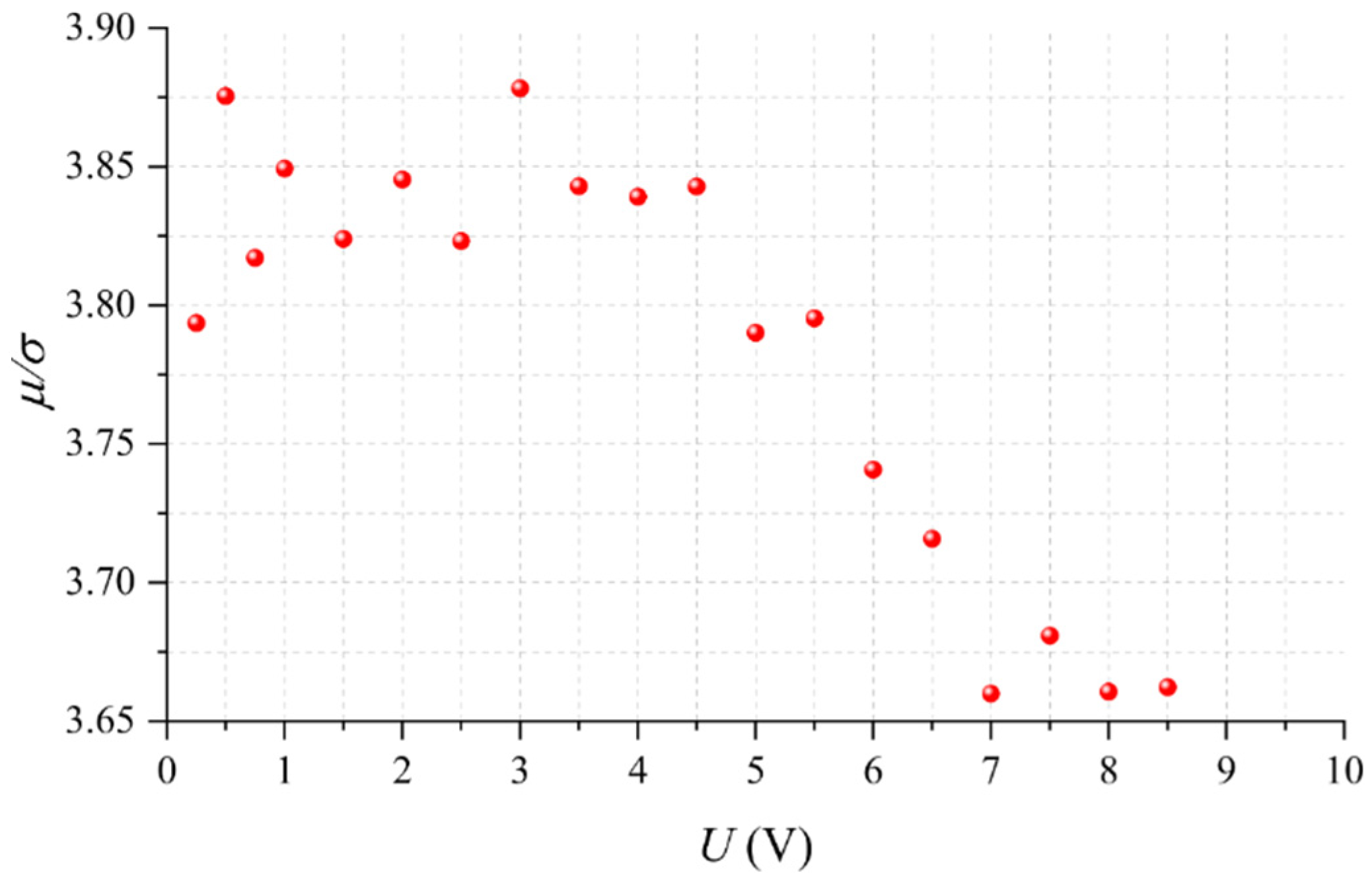
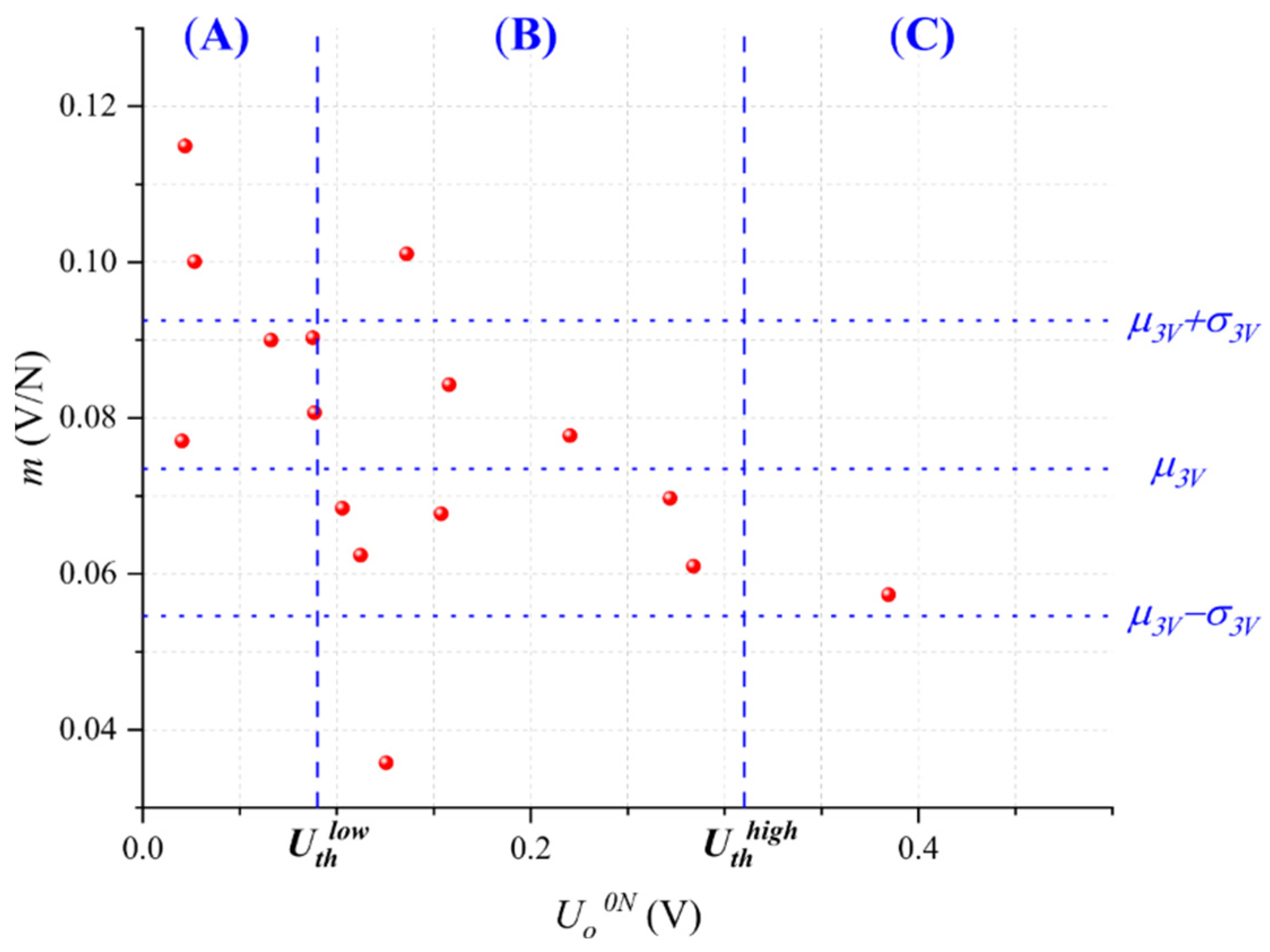
4.3. Assessing the Compensation Technique from a Six Sigma Perspective
4.4. Practical Considerations for the Implementation of the Proposed Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Foundations of the Six Sigma Methodology
References
- Yeasmin, R.; Duy, L.T.; Han, S.; Seo, H. Intrinsically Stretchable and Self-Healing Electroconductive Composites Based on Supramolecular Organic Polymer Embedded with Copper Microparticles. Adv. Electron. Mater. 2020, 6, 2000527. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Schubert, D.W. Highly Sensitive Ultrathin Flexible Thermoplastic Polyurethane/Carbon Black Fibrous Film Strain Sensor with Adjustable Scaffold Networks. Nano-Micro Lett. 2021, 13, 64. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Yuan, L.; Yao, X.; Zheng, Z.; Fang, D. Monotonic Strain Sensing Behavior of Self-Assembled Carbon Nanotubes/Graphene Silicone Rubber Composites under Cyclic Loading. Compos. Sci. Technol. 2020, 200, 108474. [Google Scholar] [CrossRef]
- Zhao, Y.; Ren, M.; Shang, Y.; Li, J.; Wang, S.; Zhai, W.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. Ultra-Sensitive and Durable Strain Sensor with Sandwich Structure and Excellent Anti-Interference Ability for Wearable Electronic Skins. Compos. Sci. Technol. 2020, 200, 108448. [Google Scholar] [CrossRef]
- Xiang, D.; Zhang, X.; Han, Z.; Zhang, Z.; Zhou, Z.; Harkin-Jones, E.; Zhang, J.; Luo, X.; Wang, P.; Zhao, C.; et al. 3D Printed High-Performance Flexible Strain Sensors Based on Carbon Nanotube and Graphene Nanoplatelet Filled Polymer Composites. J. Mater. Sci. 2020, 55, 15769–15786. [Google Scholar] [CrossRef]
- Fekiri, C.; Kim, H.C.; Lee, I.H. 3d-Printable Carbon Nanotubes-Based Composite for Flexible Piezoresistive Sensors. Materials 2020, 13, 5482. [Google Scholar] [CrossRef]
- Aikawa, S.; Zhao, Y.; Yan, J. Development of High-Sensitivity Electrically Conductive Composite Elements by Press Molding of Polymer and Carbon Nanofibers. Micromachines 2022, 13, 170. [Google Scholar] [CrossRef]
- Li, F.-C.; Kong, Z.; Wu, J.-H.; Ji, X.-Y.; Liang, J.-J. Advances in Flexible Piezoresistive Pressure Sensor. Wuli Xuebao Acta Phys. Sin. 2021, 70, 100703. [Google Scholar] [CrossRef]
- Kanoun, O.; Bouhamed, A.; Ramalingame, R.; Bautista-Quijano, J.R.; Rajendran, D.; Al-Hamry, A. Review on Conductive Polymer/CNTs Nanocomposites Based Flexible and Stretchable Strain and Pressure Sensors. Sensors 2021, 21, 341. [Google Scholar] [CrossRef]
- Kim, K.; Shin, S.; Kong, K. An Air-Filled Pad With Elastomeric Pillar Array Designed for a Force-Sensing Insole. IEEE Sens. J. 2018, 18, 3968–3976. [Google Scholar] [CrossRef]
- Chen, D.; Cai, Y.; Huang, M.-C. Customizable Pressure Sensor Array: Design and Evaluation. IEEE Sens. J. 2018, 18, 6337–6344. [Google Scholar] [CrossRef]
- Aoyagi, S.; Suzuki, M.; Morita, T.; Takahashi, T.; Takise, H. Bellows Suction Cup Equipped With Force Sensing Ability by Direct Coating Thin-Film Resistor for Vacuum Type Robotic Hand. IEEEASME Trans. Mechatron. 2020, 25, 2501–2512. [Google Scholar] [CrossRef]
- Liang, J.; Wu, J.; Huang, H.; Xu, W.; Li, B.; Xi, F. Soft Sensitive Skin for Safety Control of a Nursing Robot Using Proximity and Tactile Sensors. IEEE Sens. J. 2020, 20, 3822–3830. [Google Scholar] [CrossRef]
- Zhang, H.; Ren, P.; Yang, F.; Chen, J.; Wang, C.; Zhou, Y.; Fu, J. Biomimetic Epidermal Sensors Assembled from Polydopamine-Modified Reduced Graphene Oxide/Polyvinyl Alcohol Hydrogels for the Real-Time Monitoring of Human Motions. J. Mater. Chem. B 2020, 8, 10549–10558. [Google Scholar] [CrossRef]
- Sun, X.; Liu, T.; Zhou, J.; Yao, L.; Liang, S.; Zhao, M.; Liu, C.; Xue, N. Recent Applications of Different Microstructure Designs in High Performance Tactile Sensors: A Review. IEEE Sens. J. 2021, 21, 10291–10303. [Google Scholar] [CrossRef]
- Boada, M.; Lazaro, A.; Villarino, R.; Gil, E.; Girbau, D. Battery-Less NFC Bicycle Tire Pressure Sensor Based on a Force-Sensing Resistor. IEEE Access 2021, 9, 103975–103987. [Google Scholar] [CrossRef]
- Pang, G.; Deng, J.; Wang, F.; Zhang, J.; Pang, Z.; Yang, G. Development of Flexible Robot Skin for Safe and Natural Humanâ—Robot Collaboration. Micromachines 2018, 9, 576. [Google Scholar] [CrossRef] [Green Version]
- Cavallo, A.; Beccatelli, M.; Favero, A.; Al Kayal, T.; Seletti, D.; Losi, P.; Soldani, G.; Coppedè, N. A Biocompatible Pressure Sensor Based on a 3D-Printed Scaffold Functionalized with PEDOT:PSS for Biomedical Applications. Org. Electron. 2021, 96, 106204. [Google Scholar] [CrossRef]
- Fernandez, F.D.M.; Khadka, R.; Yim, J.-H. Highly Porous, Soft, and Flexible Vapor-Phase Polymerized Polypyrrole-Styrene-Ethylene-Butylene-Styrene Hybrid Scaffold as Ammonia and Strain Sensor. RSC Adv. 2020, 10, 22533–22541. [Google Scholar] [CrossRef]
- Lo, L.-W.; Zhao, J.; Wan, H.; Wang, Y.; Chakrabartty, S.; Wang, C. An Inkjet-Printed PEDOT:PSS-Based Stretchable Conductor for Wearable Health Monitoring Device Applications. ACS Appl. Mater. Interfaces 2021, 13, 21693–21702. [Google Scholar] [CrossRef]
- Ou, L.; Song, B.; Liang, H.; Liu, J.; Feng, X.; Deng, B.; Sun, T.; Shao, L. Toxicity of Graphene-Family Nanoparticles: A General Review of the Origins and Mechanisms. Part. Fibre Toxicol. 2016, 13, 57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, K.; Song, C.; Wang, Z.; Gao, C.; Wu, Y.; Liu, Y. A Stretchable and Self-Healable Organosilicon Conductive Nanocomposite for a Reliable and Sensitive Strain Sensor. J. Mater. Chem. C 2020, 8, 17277–17288. [Google Scholar] [CrossRef]
- Hussain, I.; Ma, X.; Luo, Y.; Luo, Z. Fabrication and Characterization of Glycogen-Based Elastic, Self-Healable, and Conductive Hydrogels as a Wearable Strain-Sensor for Flexible e-Skin. Polymer 2020, 210, 122961. [Google Scholar] [CrossRef]
- Ma, Z.; Li, H.; Jing, X.; Liu, Y.; Mi, H.-Y. Recent Advancements in Self-Healing Composite Elastomers for Flexible Strain Sensors: Materials, Healing Systems, and Features. Sens. Actuators Phys. 2021, 329, 112800. [Google Scholar] [CrossRef]
- Paredes-Madrid, L.; Palacio, C.A.; Matute, A.; Parra Vargas, C.A. Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs) under Static Loading Conditions. Sensors 2017, 17, 2108. [Google Scholar] [CrossRef] [Green Version]
- Paredes-Madrid, L.; Fonseca, J.; Matute, A.; Gutiãrrez Velãsquez, E.I.; Palacio, C.A. Self-Compensated Driving Circuit for Reducing Drift and Hysteresis in Force Sensing Resistors. Electronics 2018, 7, 146. [Google Scholar] [CrossRef] [Green Version]
- Interlink Electronics FSR400 Series Datasheet. 2017. Available online: https://f.hubspotusercontent20.net/hubfs/3899023/Integration%20Guides/FSR%20X%20%26%20UX%20Integration%20Guide%20-%20Interlink%20Electronics.pdf (accessed on 26 April 2022).
- Peratech Inc. QTC SP200 Series Datasheet. Single Point Sensors. 2015. Available online: https://www.peratech.com/assets/uploads/datasheets/Peratech-QTC-DataSheet-SP200-Series-Nov15.pdf (accessed on 26 April 2022).
- Tekscan Inc. FlexiForce, Standard Force & Load Sensors Model A201. Datasheet. 2017. Available online: https://www.tekscan.com/sites/default/files/resources/FLX-Datasheet-A201-RevI.pdf (accessed on 26 April 2022).
- Omega Ultra Low Profile, Tension and Compression Load Cells. 2021. Available online: https://www.omega.com/en-us/force-strain-measurement/load-cells/lchd/p/LCHD-7-5K (accessed on 26 April 2022).
- Urban, S.; Ludersdorfer, M.; van der Smagt, P. Sensor Calibration and Hysteresis Compensation with Heteroscedastic Gaussian Processes. IEEE Sens. J. 2015, 15, 6498–6506. [Google Scholar] [CrossRef]
- Nguyen, X.A.; Chauhan, S. Characterization of Flexible and Stretchable Sensors Using Neural Networks. Meas. Sci. Technol. 2021, 32, 075004. [Google Scholar] [CrossRef]
- Albright, T.B.; Hobeck, J.D. High-Fidelity Stochastic Modeling of Carbon Black-Based Conductive Polymer Composites for Strain and Fatigue Sensing. J. Mater. Sci. 2021, 56, 6861–6877. [Google Scholar] [CrossRef]
- Castellanos-Ramos, J.; Navas-Gonzalez, R.; Macicior, H.; Sikora, T.; Ochoteco, E.; Vidal-Verdu, F. Tactile Sensors Based on Conductive Polymers. Microsys. Technol. 2010, 16, 765–776. [Google Scholar] [CrossRef]
- Meyer, D.; Maehling, P.; Varghese, T.; Lewis, J. Calibration Considerations for Six SigmaTM Accuracy and Precision in Combustion Pressure Measurement. SAE Int. J. Commer. Veh. 2017, 10, 508–517. [Google Scholar] [CrossRef]
- Milačič, M.; Booden, V.; Grimes, J.; Maier, B. Hydrogen Leak Detection Method Derived Using DCOV Methodology. SAE Tech. Pap. 2009, 9, 97–102. [Google Scholar] [CrossRef]
- Yusof, N.S.B.; Sapuan, S.M.; Sultan, M.T.H.; Jawaid, M. Materials Selection of “Green” Natural Fibers in Polymer Composite Automotive Crash Box Using DMAIC Approach in Six Sigma Method. J. Eng. Fibers Fabr. 2020, 15, 1558925020920773. [Google Scholar] [CrossRef]
- Prabhakaran, R.T.D.; Babu, B.J.C.; Agrawal, V.P. Quality Modeling and Analysis of Polymer Composite Products. Polym. Compos. 2006, 27, 329–340. [Google Scholar] [CrossRef]
- Arvidsson, M.; Gremyr, I.; Johansson, P. Use and Knowledge of Robust Design Methodology: A Survey of Swedish Industry. J. Eng. Des. 2003, 14, 129–143. [Google Scholar] [CrossRef]
- Lucero, B.; Linsey, J.; Turner, C.J. Frameworks for Organising Design Performance Metrics. J. Eng. Des. 2016, 27, 175–204. [Google Scholar] [CrossRef]
- Pyzdek, T. The Six Sigma Handbook, Revised and Expanded; McGraw Hill: New York, NY, USA, 2002. [Google Scholar]
- Dauzon, E.; Lin, Y.; Faber, H.; Yengel, E.; Sallenave, X.; Plesse, C.; Goubard, F.; Amassian, A.; Anthopoulos, T.D. Stretchable and Transparent Conductive PEDOT:PSS-Based Electrodes for Organic Photovoltaics and Strain Sensors Applications. Adv. Funct. Mater. 2020, 30, 2001251. [Google Scholar] [CrossRef]
- Cvek, M.; Kutalkova, E.; Moucka, R.; Urbanek, P.; Sedlacik, M. Lightweight, Transparent Piezoresistive Sensors Conceptualized as Anisotropic Magnetorheological Elastomers: A Durability Study. Int. J. Mech. Sci. 2020, 183, 105816. [Google Scholar] [CrossRef]
- Ding, S.; Han, B.; Dong, X.; Yu, X.; Ni, Y.; Zheng, Q.; Ou, J. Pressure-Sensitive Behaviors, Mechanisms and Model of Field Assisted Quantum Tunneling Composites. Polymer 2017, 113, 105–118. [Google Scholar] [CrossRef] [Green Version]
- Kalantari, M.; Dargahi, J.; Kovecses, J.; Mardasi, M.G.; Nouri, S. A New Approach for Modeling Piezoresistive Force Sensors Based on Semiconductive Polymer Composites. IEEE ASME Trans. Mechatr. 2012, 17, 572–581. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Thostenson, E.T.; Chou, T.-W. Dominant Role of Tunneling Resistance in the Electrical Conductivity of Carbon Nanotube–Based Composites. Appl. Phys. Lett. 2007, 91, 223114. [Google Scholar] [CrossRef]
- Awasthi, S.; Gopinathan, P.S.; Rajanikanth, A.; Bansal, C. Current–Voltage Characteristics of Electrochemically Synthesized Multi-Layer Graphene with Polyaniline. J. Sci. Adv. Mater. Dev. 2018, 3, 37–43. [Google Scholar] [CrossRef]
- Oskouyi, A.B.; Uttandaraman, S.; Mertiny, P. Current-Voltage Characteristics of Nanoplatelet-Based Conductive Nanocomposites. Nanoscale Res. Lett. 2014, 9, 369. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Panozzo, F.; Zappalorto, M.; Quaresimin, M. Analytical Model for the Prediction of the Piezoresistive Behavior of {CNT} Modified Polymers. Compos. Part B Eng. 2017, 109, 53–63. [Google Scholar] [CrossRef]
- Clayton, M.F.; Bilodeau, R.A.; Bowden, A.E.; Fullwood, D.T. Nanoparticle Orientation Distribution Analysis and Design for Polymeric Piezoresistive Sensors. Sens. Actuators Phys. 2020, 303, 111851. [Google Scholar] [CrossRef]
- Simmons, J. Electrical Tunnel Effect between Dissimilar Electrodes Separated by a Thin Insulating Film. J. Appl. Phys. 1963, 34, 2581–2590. [Google Scholar] [CrossRef]
- Zhang, X.-W.; Pan, Y.; Zheng, Q.; Yi, X.-S. Time Dependence of Piezoresistance for the Conductor-Filled Polymer Composites. J. Pol. Sci. Part B Pol. Phys. 2000, 38, 2739–2749. [Google Scholar] [CrossRef]
- Esquinazi, P.; Barzola-Quiquia, J.; Dusari, S.; García, N. Length Dependence of the Resistance in Graphite: Influence of Ballistic Transport. J. Appl. Phys. 2012, 111, 033709. [Google Scholar] [CrossRef] [Green Version]
- Mikrajuddin, A.; Shi, F.G.; Kim, H.K.; Okuyama, K. Size-Dependent Electrical Constriction Resistance for Contacts of Arbitrary Size: From Sharvin to Holm Limits. Mat. Sci. Semicon. Proc. 1999, 2, 321–327. [Google Scholar] [CrossRef]
- Paredes-Madrid, L.; Matute, A.; Bareño, J.O.; Parra Vargas, C.A.; Gutierrez Velásquez, E.I. Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs). A Study on Creep Response and Dynamic Loading. Materials 2017, 10, 1334. [Google Scholar] [CrossRef] [Green Version]
- Paredes-Madrid, L.; Garzon Posada, A.; Fontalvo, V.; Peña Puerto, A.; Palacio Gómez, C.A. Force Sensing Resistor Data for Enhancing Part-to-Part Repeatability Using a Six Sigma Approach. IEEE Dataport. 2021, 2021, 16. [Google Scholar] [CrossRef]
- Emara, M.K.; Tomura, T.; Hirokawa, J.; Gupta, S. All-Dielectric Fabry–Pérot-Based Compound Huygens’ Structure for Millimeter-Wave Beamforming. IEEE Trans. Antennas Propag. 2021, 69, 273–285. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step of the Cycle | Description |
|---|---|
| Define | Sensitivity (m) of 64 specimens of commercial FSRs, model Interlink FSR402 [27]. A total of 48 sensors were considered for the DMAI stages and 16 for the C stage. |
| Measure | Sensitivity was measured in force steps of 1 N, starting at 0 N up to 20 N. A total of 19 input voltages (U) were considered: 0.25 V, 0.5 V, 0.75 V, and 1 V. Above 1 V, voltage increments of 0.5 V were applied up to 8.5 V. |
| Analyze | Evaluation of the experimental data in perspective of the underlying physics of FSRs. Four claims were stated to ease the analysis and to derive conclusions. |
| Improve | The improve step comprised two stages: finding the optimal input voltage that minimizes dispersion in sensitivity, proposing and test two different methods to reduce the dispersion in sensitivity. |
| Control | Validate the two methods developed in the improve stage using 16 sensors. |
| a (V) | b (N·V) | c (V) | R2 | μ (V/N) | |
|---|---|---|---|---|---|
| Region (A) | 132.3 | 139.1 | −3.36 | 0.67 | μA = 0.091 |
| Region (C) | 101 | 485.2 | −18.2 | 0.94 | μC = 0.052 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garzón-Posada, A.O.; Paredes-Madrid, L.; Peña, A.; Fontalvo, V.M.; Palacio, C. Enhancing Part-to-Part Repeatability of Force-Sensing Resistors Using a Lean Six Sigma Approach. Micromachines 2022, 13, 840. https://doi.org/10.3390/mi13060840
Garzón-Posada AO, Paredes-Madrid L, Peña A, Fontalvo VM, Palacio C. Enhancing Part-to-Part Repeatability of Force-Sensing Resistors Using a Lean Six Sigma Approach. Micromachines. 2022; 13(6):840. https://doi.org/10.3390/mi13060840
Chicago/Turabian StyleGarzón-Posada, Andrés O., Leonel Paredes-Madrid, Angela Peña, Victor M. Fontalvo, and Carlos Palacio. 2022. "Enhancing Part-to-Part Repeatability of Force-Sensing Resistors Using a Lean Six Sigma Approach" Micromachines 13, no. 6: 840. https://doi.org/10.3390/mi13060840