
The Effect of the Bending Beam Width Variations on the Discrepancy of the Resulting Quadrature Errors in MEMS Gyroscopes



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
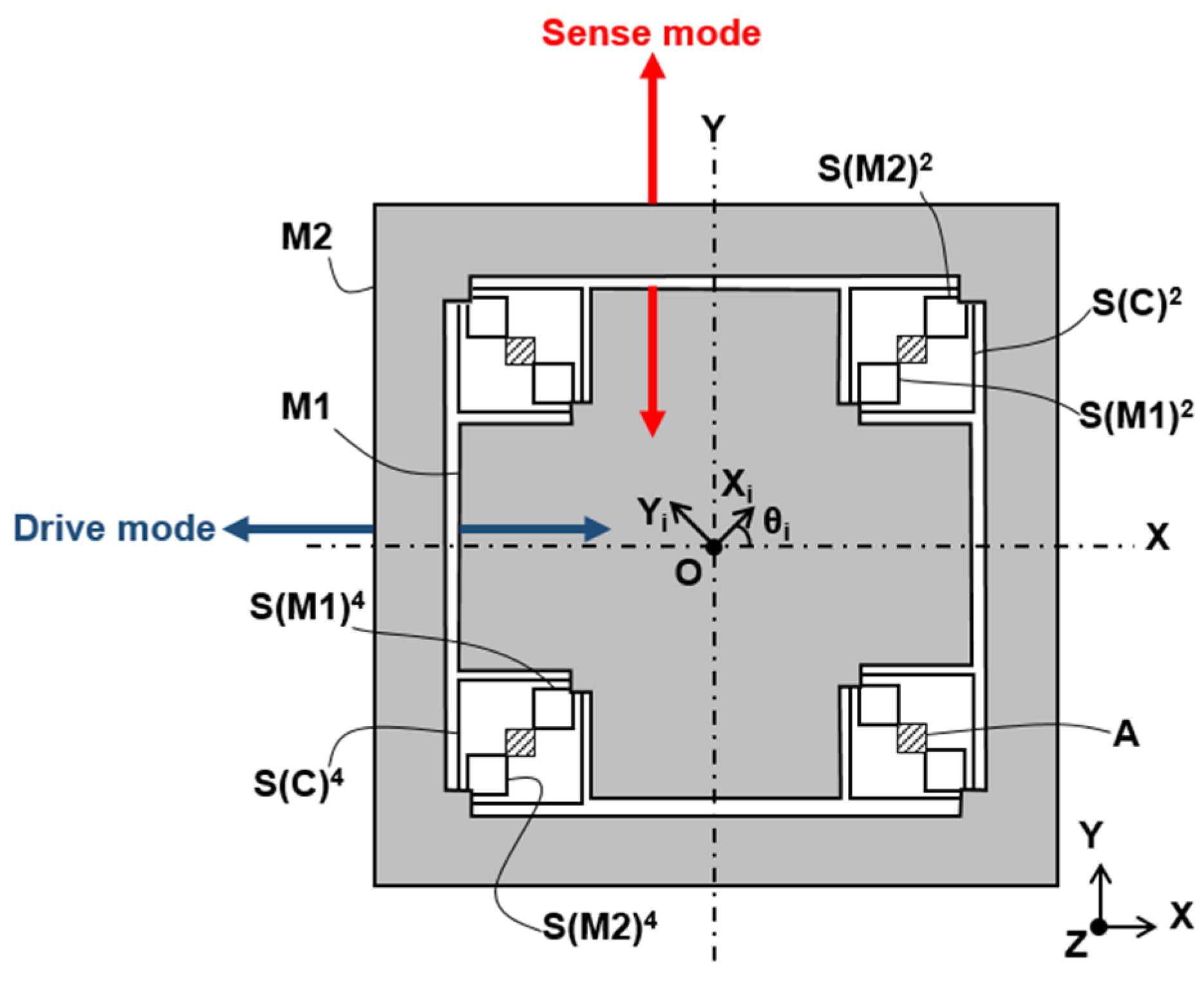
2. Gyroscope Dynamics
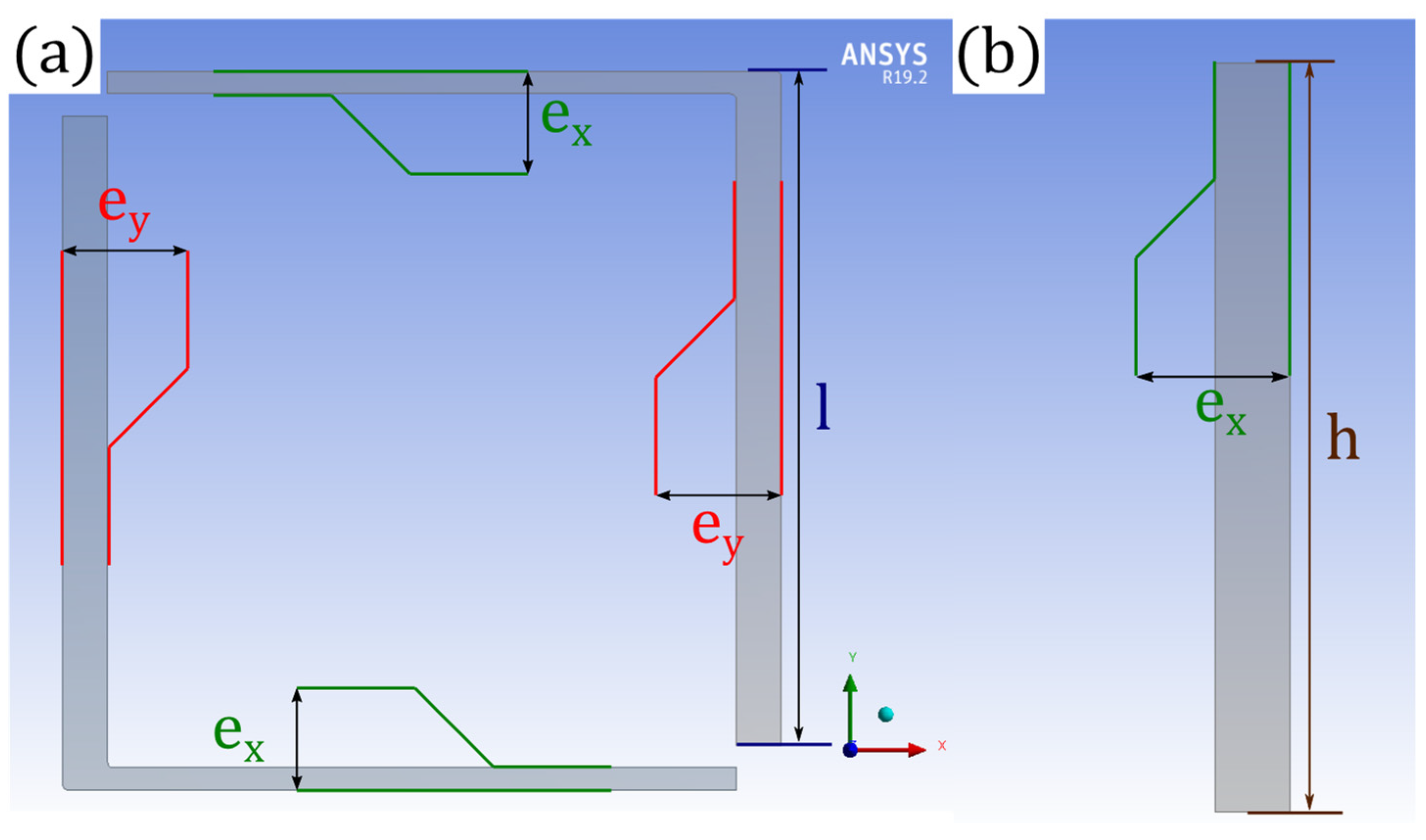
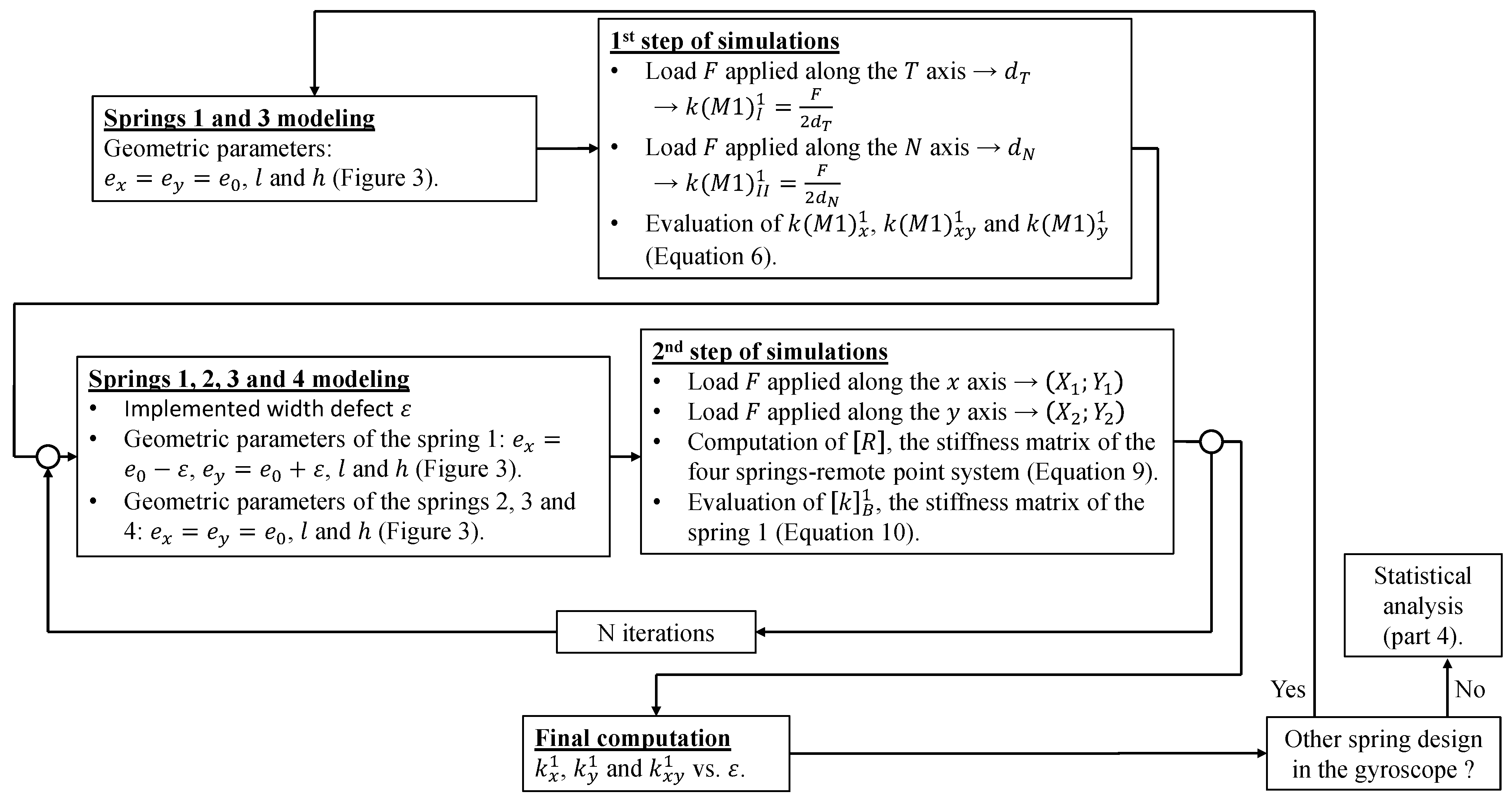
3. Expression of the Coupling Stiffness
- is the canonical coordinate system (the x and y-axis);
- represents the eigenbase of the spring number i.
4. Impact on the Amplitude of the Quadrature Signal
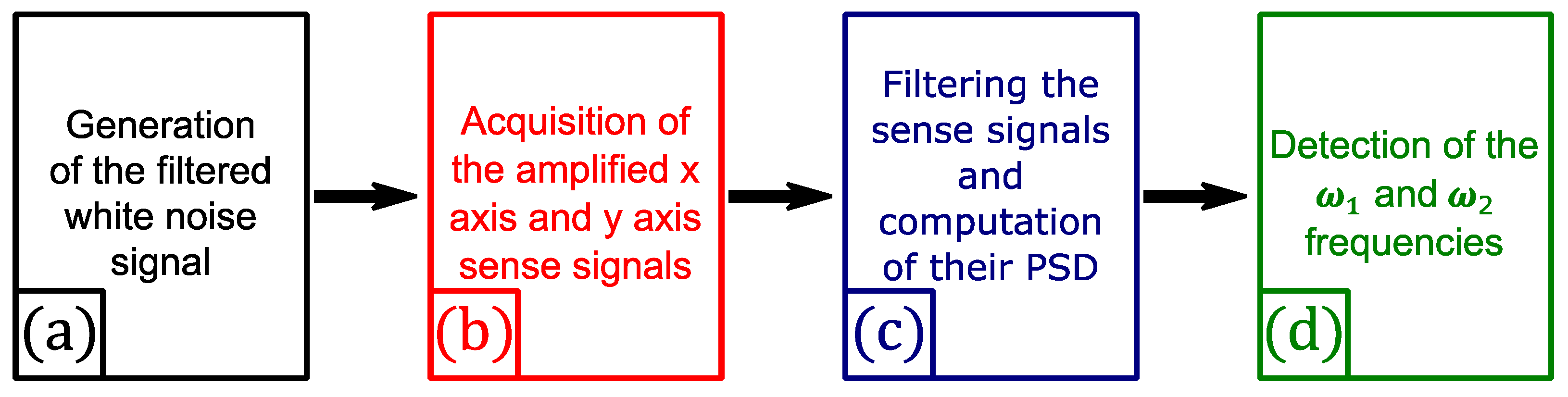
5. Electrical Measurements of the Amplitude of the Quadrature Signal
5.1. Principle
5.2. Measuring Bench
5.3. Experimental Results
5.3.1. Precision of the Measure
5.3.2. Discussion of the Results
- The length variation effect on the quadrature bias remains tiny, as the length of the bending beams is large compared to their width, so a variation of the length has a smaller impact on the ratio , which contributes to the stiffness of a bending beam [40], than a variation, of the same quantity, of the width;
- The value of for our gyroscope with a ruptured spring, which its stiffness matrix corresponds to a zero matrix, is equal to several dozens of N/m. This would generate a much higher quadrature error (>15,000°/s) than the one we measured. Thus, we can say that we did not characterise a gyroscope with such a defect.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ARW | Angular Random Walk |
| DC | Direct Current |
| i.e. | id est |
| FEA | Finite Element Analysis |
| FEM | Finite Element Model |
| FOGs | Fiber Optic Gyroscopes |
| e.g. | exempli gratia |
| HRGs | Hemispherical Ring Gyroscopes |
| MCS | Monte Carlo Simulation |
| MEMS | Microelectromechanical Systems |
| PSD | Power Spectral Density |
| Q-factor | Quality factor |
| RLGs | Ring Laser Gyroscopes |
| RMS | Root Mean Square |
| SEM | Scanning Electron Microscopy |
| ZRO | Zero-Rate Output |
References
- Allen, J.J. Micro-System Inertial Sensing Technology Overview; Sandia National Laboratories (SNL): Albuquerque, NM, USA, 2009. [CrossRef] [Green Version]
- Tronics. An Overview of MEMS and Non-MEMS Gyros. 2013. Available online: https://www.tronics.tdk.com/wp-content/uploads/2021/09/tronics_microsystems_-_white_paper_-_an_overview_of_mems_and_non-mems_high_performance_gyros-1.pdf (accessed on 17 April 2022).
- Bouyer, P. The centenary of Sagnac effect and its applications: From electromagnetic to matter waves. Gyroscopy Navig. 2014, 5, 20–26. [Google Scholar] [CrossRef]
- Shamir, A. An Overview of Optical Gyroscopes Theory, Practical Aspects, Applications and Future Trends. 2006. Available online: https://www.semanticscholar.org/paper/An-overview-of-Optical-Gyroscopes-Theory-%2C-Aspects-Shamir/3fdba8cea7cf6d0cad17b13828970f763e368f43 (accessed on 17 April 2022).
- Grattan, K.T.V.; Sun, T. Fiber optic sensor technology: An overview. Sens. Actuators A Phys. 2000, 82, 40–61. [Google Scholar] [CrossRef]
- Sanders, G.A.; Sanders, S.J.; Strandjord, L.K.; Qiu, T.; Wu, J.; Smiciklas, M.; Mead, D.; Mosor, S.; Arrizon, A.; Ho, W.; et al. Fiber Optic Gyro Development at Honeywell. In Fiber Optic Sensors and Applications XIII; SPIE: Philadelphia, PA, USA, 2016; Volume 9852, pp. 37–50. [Google Scholar]
- Rozelle, D.M. The hemispherical resonator gyro: From wineglass to the planets. Spacefl. Mech. 2009, 134, 1157–1178. [Google Scholar]
- Delhaye, F. HRG by SAFRAN: The Game-Changing Technology. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Lake Como, Italy, 26–29 March 2018; pp. 1–4. [Google Scholar]
- Bernstein, J.; Cho, S.; King, A.; Kourepenis, A.; Maciel, P.; Weinberg, M. A Micromachined Comb-Drive Tuning Fork Rate Gyroscope. In Proceedings of the IEEE Micro Electro Mechanical Systems, Fort Lauderdale, FL, USA, 10 February 1993; pp. 143–148. [Google Scholar] [CrossRef]
- Weinberg, M.S. How to invent (or not invent) the first silicon MEMS gyroscope. In Proceedings of the 2015 IEEE International Symposium on Inertial Sensors and Systems (ISISS) Proceedings, Hapuna Beach, HI, USA, 23–26 March 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Baker, G.N. Quartz rate sensor from innovation to application. Proc. Symp. Gyro Technol. 1992, 2, 1597–1602. [Google Scholar]
- Geiger, W.; Bartholomeyczik, J.; Breng, U.; Gutmann, W.; Hafen, M.; Handrich, E.; Huber, M.; Jackle, A.; Kempfer, U.; Kopmann, H.; et al. MEMS IMU for AHRS Applications. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 225–231. [Google Scholar]
- Chaumet, B.; Leverrier, B.; Rougeot, C.; Bouyat, S. A new silicon tuning fork gyroscope for aerospace applications. In Proceedings of the Symposium Gyro Technology, Karlsruhe, Germany, 22–23 September 2009; pp. 1.1–1.13. [Google Scholar]
- Deppe, O.; Dorner, G.; König, S.; Martin, T.; Voigt, S.; Zimmermann, S. MEMS and FOG Technologies for Tactical and Navigation Grade Inertial Sensors—Recent Improvements and Comparison. Sensors 2017, 17, 567. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, G.; Chua, G.; Gu, Y. A dual-mass fully decoupled MEMS gyroscope with wide bandwidth and high linearity. Sens. Actuators A Phys. 2017, 259, 50–56. [Google Scholar] [CrossRef]
- Vercier, N.; Chaumet, B.; Leverrier, B.; Bouyat, S. A new Silicon Axisymmetric Gyroscope for Aerospace Applications. In Proceedings of the DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 15–16 September 2020; pp. 1–18. [Google Scholar]
- Askari, S.; Asadian, M.; Shkel, A. Performance of Quad Mass Gyroscope in the Angular Rate Mode. Micromachines 2021, 12, 266. [Google Scholar] [CrossRef] [PubMed]
- Koenig, S.; Rombach, S.; Gutmann, W.; Jaeckle, A.; Weber, C.; Ruf, M.; Grolle, D.; Rende, J. Towards a navigation grade Si-MEMS gyroscope. In Proceedings of the DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 10–11 September 2019; pp. 1–18. [Google Scholar]
- Wu, H.; Zheng, X.; Wang, X.; Shen, Y.; Ma, Z.; Jin, Z. A 0.09°/h Bias-Instability MEMS Gyroscope Working with a Fixed Resonance Frequency. IEEE Sens. J. 2021, 21, 23787–23798. [Google Scholar] [CrossRef]
- He, G.; Najafi, K. A Single-Crystal Silicon Vibrating Ring Gyroscope. In Proceedings of the Technical Digest. MEMS 2002 IEEE International Conference. Fifteenth IEEE International Conference on Micro Electro Mechanical Systems (Cat. No. 02CH37266), Las Vegas, NV, USA, 20–24 January 2002; pp. 718–721. [Google Scholar]
- Trusov, A.A.; Schofield, A.R.; Shkel, A.M. Micromachined rate gyroscope architecture with ultra-high quality factor and improved mode ordering. Sens. Actuators A Phys. 2011, 165, 26–34. [Google Scholar] [CrossRef]
- Geiger, W.; Folkmer, B.; Merz, J.; Sandmaier, H.; Lang, W. A new silicon rate gyroscope. Sens. Actuators A Phys. 1999, 73, 45–51. [Google Scholar] [CrossRef]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined inertial sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef] [Green Version]
- Phani, S.; Seshia, A.; Palaniapan, M.; Howe, R.; Yasaitis, J. Modal Coupling in Micromechanical Vibratory Rate Gyroscopes. IEEE Sens. J. 2006, 6, 1144–1152. [Google Scholar] [CrossRef]
- Clark, W.; Horowitz, R.; Howe, R. Surface Micromachined Z-Axis Vibratory Rate Gyroscope. In Proceedings of the Technical Digest Solid-State Sensor and Actuator Workshop, Hilton Head Island, SC, USA, 3–6 June 1996; pp. 283–287. [Google Scholar]
- Xie, H.; Fedder, G.K. Integrated Microelectromechanical Gyroscopes. J. Aerosp. Eng. 2003, 16, 65–75. [Google Scholar] [CrossRef] [Green Version]
- Tatar, E.; Alper, S.E.; Akin, T. Quadrature-Error Compensation and Corresponding Effects on the Performance of Fully Decoupled MEMS Gyroscopes. J. Microelectromech. Syst. 2012, 21, 656–667. [Google Scholar] [CrossRef]
- Yin, Y.; Wang, S.; Wang, C.; Yang, B. Structure-decoupled dual-mass MEMS gyroscope with self-adaptive closed-loop detection. In Proceedings of the IEEE 5th International Conference on Nano/Micro Engineered and Molecular Systems, Xiamen, China, 20–23 January 2010; pp. 624–627. [Google Scholar]
- Saukoski, M.; Aaltonen, L.; Halonen, K.A.I. Zero-Rate Output and Quadrature Compensation in Vibratory MEMS Gyroscopes. IEEE Sens. J. 2007, 7, 1639–1652. [Google Scholar] [CrossRef]
- Walther, A.; Deimerly, Y.; Anciant, R.; Le Blanc, C.; Delorme, N.; Willemin, J. Bias Contributions in a MEMS Tuning Fork Gyroscope. J. Microelectromech. Syst. 2012, 22, 303–308. [Google Scholar] [CrossRef]
- Antonello, R.; Oboe, R.; Prandi, L.; Caminada, C.; Biganzoli, F. Open Loop Compensation of the Quadrature Error in MEMS Vibrating Gyroscopes. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 4034–4039. [Google Scholar]
- Yeh, B.Y.; Liang, Y.C. Modelling and compensation of quadrature error for silicon MEMS microgyroscope. In Proceedings of the IEEE 4th International Conference on Power Electronics and Drive Systems, IEEE PEDS 2001—Indonesia, Proceedings (Cat. No. 01TH8594), Denpasar, Indonesia, 25 October 2001; Volume 2, pp. 871–876. [Google Scholar]
- Seeger, J.; Rastegar, A.; Tormey, M.T. Method and Apparatus for Electronic Cancellation of Quadrature Error. U.S. Patent 7,290,435 B2, 6 November 2007. [Google Scholar]
- Chaumet, B.; Filhol, F.; Rougeot, C.; Leverrier, B. MEMS Angular Inertial Sensor Operating in Tuning Fork Mode. U.S. Patent 9,574,879 B2, 21 February 2017. [Google Scholar]
- Painter, C.; Shkel, A. Active structural error suppression in MEMS vibratory rate integrating gyroscopes. IEEE Sens. J. 2003, 3, 595–606. [Google Scholar] [CrossRef] [Green Version]
- Su, J.; Xiao, D.; Wu, X.; Hou, Z.; Chen, Z. Improvement of bias stability for a micromachined gyroscope based on dynamic electrical balancing of coupling stiffness. J. Micro/Nanolithogr. MEMS MOEMS 2013, 12, 033008. [Google Scholar] [CrossRef]
- Merz, P.; Pilz, W.; Senger, F.; Reimer, K.; Grouchko, M.; Pandhumsoporn, T.; Bosch, W.; Cofer, A.; Lassig, S. Impact of Si DRIE on vibratory MEMS gyroscope performance. In Proceedings of the TRANSDUCERS 2007 International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007; pp. 1187–1190. [Google Scholar]
- Iyer, S.V. Modeling and Simulation of Non-Idealities in a Z-Axis CMOS-MEMS Gyroscope; Carnegie Mellon University: Cambridge, MA, USA, 2003. [Google Scholar]
- Kempe, V. Inertial MEMS: Principles and Practice; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Gere, J.; Timoshenko, S.; Hardani, W.; Suryoatmono, B. Mechanics of Materials, 4th ed.; PWS: New York, NY, USA, 1997. [Google Scholar]
- Weinberg, M.; Candler, R.; Chandorkar, S.; Varsanik, J.; Kenny, T.; Duwel, A. Energy loss in MEMS resonators and the impact on inertial and RF devices. In Proceedings of the TRANSDUCERS 2009 International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009; pp. 688–695. [Google Scholar]
- Roszhart, T.V. The effect of thermoelastic internal friction on the Q of micromachined silicon resonators. In Proceedings of the IEEE 4th Technical Digest on Solid-State Sensor and Actuator Workshop, Hilton Head, SC, USA, 4–7 June 1990; pp. 13–16. [Google Scholar]
- Kacem, N.; Hentz, S.; Pinto, D.; Reig, B.; Nguyen, V. Nonlinear dynamics of nanomechanical beam resonators: Improving the performance of NEMS-based sensors. Nanotechnology 2009, 20, 275501. [Google Scholar] [CrossRef] [PubMed]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azier, A.; Kacem, N.; Chaumet, B.; Bouhaddi, N. The Effect of the Bending Beam Width Variations on the Discrepancy of the Resulting Quadrature Errors in MEMS Gyroscopes. Micromachines 2022, 13, 655. https://doi.org/10.3390/mi13050655
Azier A, Kacem N, Chaumet B, Bouhaddi N. The Effect of the Bending Beam Width Variations on the Discrepancy of the Resulting Quadrature Errors in MEMS Gyroscopes. Micromachines. 2022; 13(5):655. https://doi.org/10.3390/mi13050655
Chicago/Turabian StyleAzier, Alexandre, Najib Kacem, Bernard Chaumet, and Noureddine Bouhaddi. 2022. "The Effect of the Bending Beam Width Variations on the Discrepancy of the Resulting Quadrature Errors in MEMS Gyroscopes" Micromachines 13, no. 5: 655. https://doi.org/10.3390/mi13050655