
Surface Roughening of Pt-Polystyrene Spherical Janus Micromotors for Enhanced Motion Speed

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Section
2.1. Materials and Chemicals
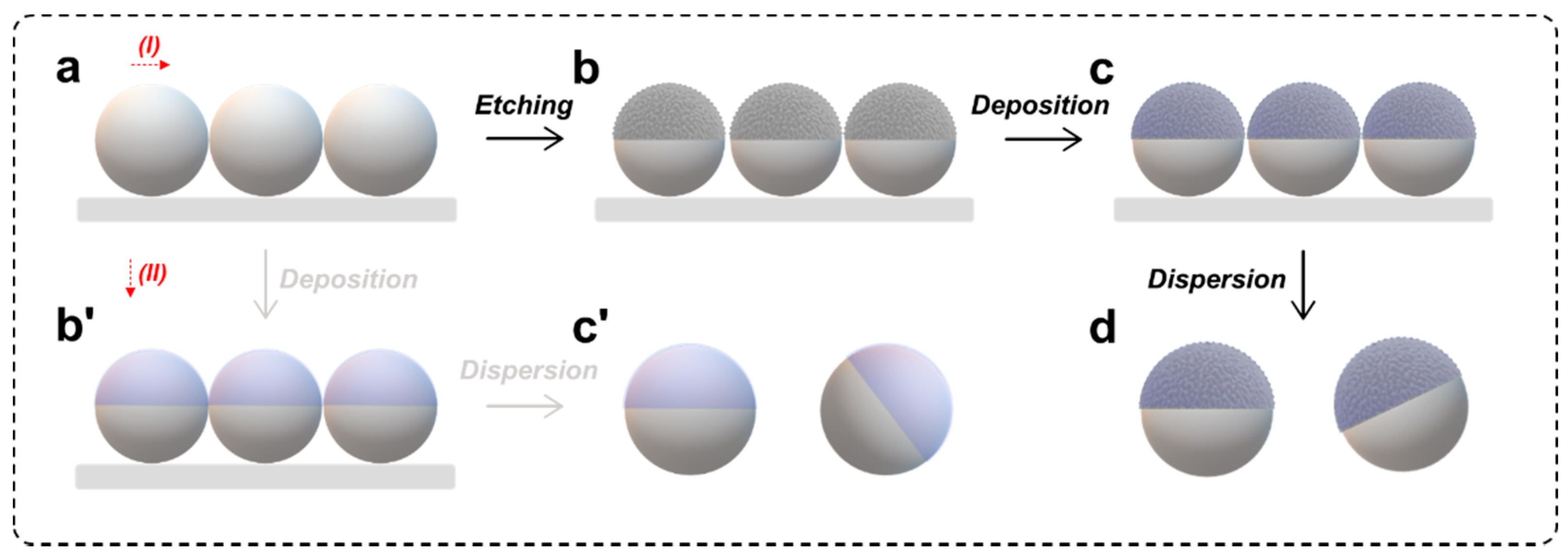
2.2. Fabrication of the Ptr-PS SJMs
2.2.1. Preparation and Etching of the PS Colloidal Monolayer
2.2.2. Preparation of the Ptr-PS SJMs
2.3. Characterizations and Motion Observations
3. Results and Discussion
3.1. Morphology and Structure
3.2. Self-Propelled Behavior
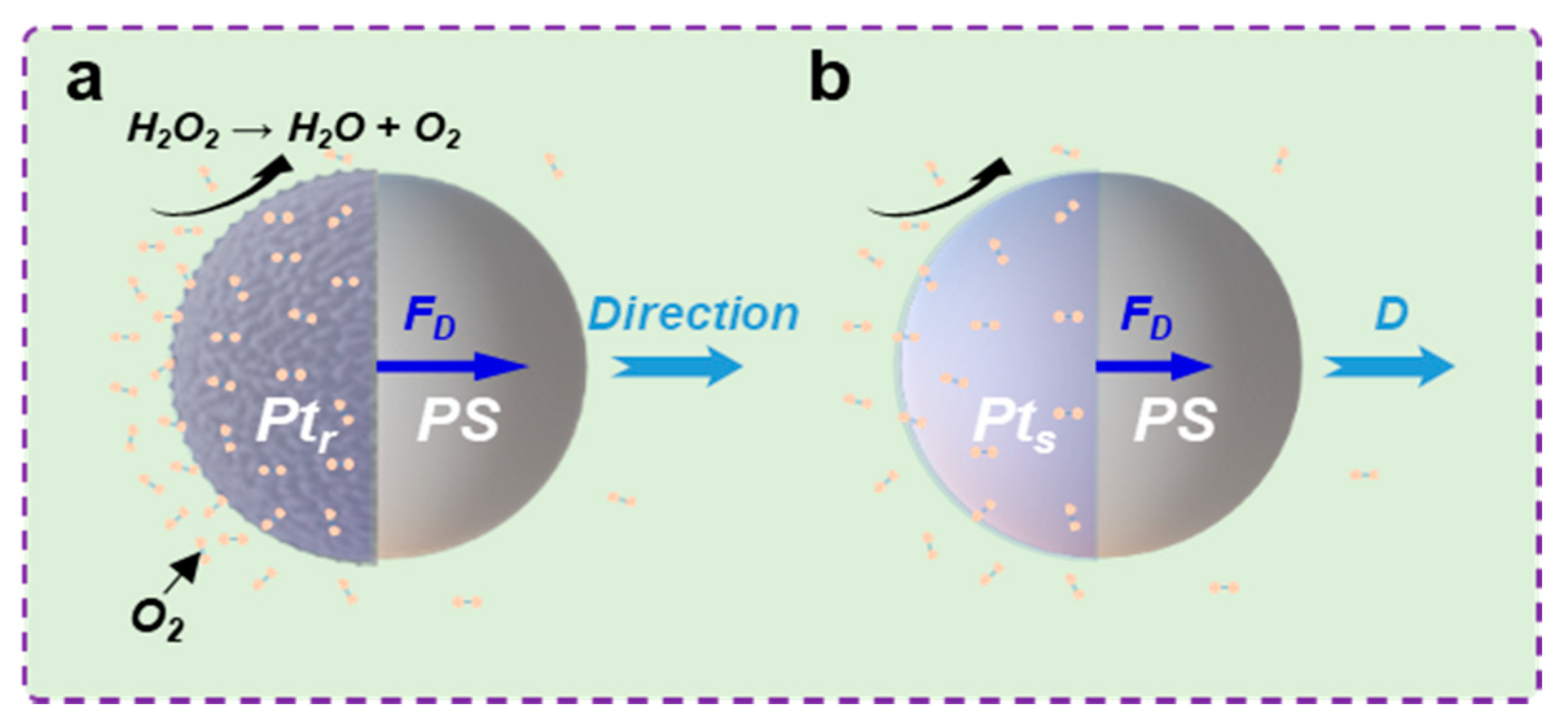
3.3. Rough Pt Surface-Enhanced Self-Propelled Mechanism
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Liu, W.J.; Chen, X.; Lu, X.L.; Wang, J.; Zhang, Y.A.; Gu, Z.W. From Passive Inorganic Oxides to Active Matters of Micro/Nanomotors. Adv. Funct. Mater. 2020, 30, 2003195. [Google Scholar] [CrossRef]
- Liu, M.; Zhao, K. Engineering Active Micro and Nanomotors. Micromachines 2021, 12, 687. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Lin, Z.; Xuan, M.; Lin, X.; Yang, M.; Dai, L.; He, Q. Programmable Dynamic Shapes with a Swarm of Light-Powered Colloidal Motors. Angew. Chem. Int. Ed. 2021, 60, 16674–16679. [Google Scholar] [CrossRef] [PubMed]
- Safdar, M.; Wani, O.M.; Janis, J. Manganese Oxide-Based Chemically Powered Micromotors. ACS Appl. Mater. Interfaces 2015, 7, 25580–25585. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, H.W.; Bao, H.M.; Wei, Y.; Fu, H.; Cai, W.P. Monodispersed Snowman-Like Ag-MoS2 Janus Nanoparticles as Chemically Self-Propelled Nanomotors. ACS Appl. Nano Mater. 2020, 3, 624–632. [Google Scholar] [CrossRef] [Green Version]
- Sanchez, S.; Soler, L.; Katuri, J. Chemically Powered Micro- and Nanomotors. Angew. Chem. Int. Ed. 2015, 54, 1414. [Google Scholar] [CrossRef]
- Soler, L.; Magdanz, V.; Fomin, V.M.; Sanchez, S.; Schmidt, O.G. Self-Propelled Micromotors for Cleaning Polluted Water. ACS Nano 2013, 7, 9611–9620. [Google Scholar] [CrossRef]
- Gao, W.; Feng, X.M.; Pei, A.; Gu, Y.E.; Li, J.X.; Wang, J. Seawater-driven magnesium based Janus micromotors for environmental remediation. Nanoscale 2013, 5, 4696–4700. [Google Scholar] [CrossRef] [Green Version]
- Gao, C.Y.; Wang, Y.; Ye, Z.H.; Lin, Z.H.; Ma, X.; He, Q. Biomedical Micro-/Nanomotors: From Overcoming Biological Barriers to In Vivo Imaging. Adv. Mater. 2021, 33, 2000512. [Google Scholar] [CrossRef]
- Zhang, F.Y.; Mundaca-Uribe, R.; Askarinam, N.; Li, Z.X.; Gao, W.W.; Zhang, L.F.; Wang, J. Biomembrane-Functionalized Micromotors: Biocompatible Active Devices for Diverse Biomedical Applications. Adv. Mater. 2022, 34, 2107177. [Google Scholar] [CrossRef]
- Zhou, C.; Zhang, H.P.; Tang, J.Y.; Wang, W. Photochemically Powered AgCl Janus Micromotors as a Model System to Understand Ionic Self-Diffusiophoresis. Langmuir 2018, 34, 3289–3295. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Duan, W.D.; Zhou, C.; Liu, Q.; Gu, J.H.; Ye, H.; Li, M.Y.; Wang, W.; Ma, X. Phoretic Liquid Metal Micro/Nanomotors as Intelligent Filler for Targeted Microwelding. Adv. Mater. 2019, 31, 1905067. [Google Scholar] [CrossRef]
- Ebbens, S.J.; Howse, J.R. Direct Observation of the Direction of Motion for Spherical Catalytic Swimmers. Langmuir 2011, 27, 12293–12296. [Google Scholar] [CrossRef] [PubMed]
- Howse, J.R.; Jones, R.A.L.; Ryan, A.J.; Gough, T.; Vafabakhsh, R.; Golestanian, R. Self-motile colloidal particles: From directed propulsion to random walk. Phys. Rev. Lett. 2007, 99, 048102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, J.; Zheng, X.; Cui, H.H.; Silber-Li, Z. The Self-Propulsion of the Spherical Pt-SiO2 Janus Micro-Motor. Micromachines 2017, 8, 123. [Google Scholar] [CrossRef] [Green Version]
- Katuri, J.; Caballero, D.; Voituriez, R.; Samitier, J.; Sanchez, S. Directed Flow of Micromotors through Alignment Interactions with Micropatterned Ratchets. ACS Nano 2018, 12, 7282–7291. [Google Scholar] [CrossRef]
- Sun, Y.Y.; Jiang, J.W.; Zhang, G.J.; Yuan, N.N.; Zhang, H.; Song, B.; Dong, B. Visible Light-Driven Micromotor with Incident-Angle-Controlled Motion and Dynamic Collective Behavior. Langmuir 2021, 37, 180–187. [Google Scholar] [CrossRef]
- Xiao, Z.Y.; Duan, S.F.; Xu, P.Z.; Cui, J.Q.; Zhang, H.P.; Wang, W. Synergistic Speed Enhancement of an Electric-Photochemical Hybrid Micromotor by Tilt Rectification. ACS Nano 2020, 14, 8658–8667. [Google Scholar] [CrossRef]
- Paxton, W.F.; Kistler, K.C.; Olmeda, C.C.; Sen, A.; St Angelo, S.K.; Cao, Y.Y.; Mallouk, T.E.; Lammert, P.E.; Crespi, V.H. Catalytic nanomotors: Autonomous movement of striped nanorods. J. Am. Chem. Soc. 2004, 126, 13424–13431. [Google Scholar] [CrossRef]
- Liu, R.; Sen, A. Autonomous Nanomotor Based on Copper-Platinum Segmented Nanobattery. J. Am. Chem. Soc. 2011, 133, 20064–20067. [Google Scholar] [CrossRef]
- Cao, W.; Liu, Y.; Ran, P.; He, J.; Xie, S.; Weng, J.; Li, X. Ultrasound-Propelled Janus Rod-Shaped Micromotors for Site-Specific Sonodynamic Thrombolysis. ACS Appl. Mater. Interfaces 2021, 13, 58411–58421. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.L.; Yan, H.; Li, S.; Liu, Y.; Ran, P.; Chen, W.J.; Li, X.H. Janus rod-like micromotors to promote the tumor accumulation and cell internalization of therapeutic agents. Chem. Eng. J. 2021, 404, 127073. [Google Scholar] [CrossRef]
- Wu, Z.G.; Wu, Y.J.; He, W.P.; Lin, X.K.; Sun, J.M.; He, Q. Self-Propelled Polymer-Based Multilayer Nanorockets for Transportation and Drug Release. Angew. Chem. Int. Ed. 2013, 52, 7000–7003. [Google Scholar] [CrossRef]
- Guix, M.; Orozco, J.; Garcia, M.; Gao, W.; Sattayasamitsathit, S.; Merkoci, A.; Escarpa, A.; Wang, J. Superhydrophobic Alkanethiol-Coated Microsubmarines for Effective Removal of Oil. ACS Nano 2012, 6, 4445–4451. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ye, H.; Kang, J.; Ma, G.F.; Sun, H.Q.; Wang, S.B. High-speed graphene@Ag-MnO2 micromotors at low peroxide levels. J. Colloid Interface Sci. 2018, 528, 271–280. [Google Scholar] [CrossRef] [PubMed]
- Khezri, B.; Mousavi, S.M.B.; Krejcova, L.; Heger, Z.; Sofer, Z.; Pumera, M. Ultrafast Electrochemical Trigger Drug Delivery Mechanism for Nanographene Micromachines. Adv. Funct. Mater. 2019, 29, 1806696. [Google Scholar] [CrossRef]
- Ye, Y.C.; Luan, J.B.; Wang, M.; Chen, Y.M.; Wilson, D.A.; Peng, F.; Tu, Y.F. Fabrication of Self-Propelled Micro- and Nanomotors Based on Janus Structures. Chem.-Eur. J. 2019, 25, 8663–8680. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Wu, N. Selecting the Swimming Mechanisms of Colloidal Particles: Bubble Propulsion versus Self-Diffusiophoresis. Langmuir 2014, 30, 3477–3486. [Google Scholar] [CrossRef]
- Wu, Y.J.; Wu, Z.G.; Lin, X.K.; He, Q.; Li, J.B. Autonomous Movement of Controllable Assembled Janus Capsule Motors. ACS Nano 2012, 6, 10910–10916. [Google Scholar] [CrossRef] [PubMed]
- Dai, Z.F.; Li, Y.; Duan, G.T.; Jia, L.C.; Cai, W.P. Phase Diagram, Design of Monolayer Binary Colloidal Crystals, and Their Fabrication Based on Ethanol-Assisted Self-Assembly at the Air/Water Interface. ACS Nano 2012, 6, 6706–6716. [Google Scholar] [CrossRef]
- Fu, R.R.; Liu, G.Q.; Jia, C.; Li, X.H.; Tang, X.; Duan, G.T.; Li, Y.; Cai, W.P. Fabrication of silver nanoplate hierarchical turreted ordered array and its application in trace analyses. Chem. Commun. 2015, 51, 6609–6612. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Q.; Liu, G.Q.; Zhang, H.W.; Cai, W.P. Ordered gold-coated glass nano-sting array with large density tips as highly SERS-active chips for detection of trace organophosphorous toxicant. Nanotechnology 2020, 31, 415301. [Google Scholar] [CrossRef]
- Zhang, P.; Liu, G.Q.; Feng, S.J.; Zhou, X.; Xu, W.S.; Cai, W.P. Engineering of flexible granular Au nanocap ordered array and its surface enhanced Raman spectroscopy effect. Nanotechnology 2020, 31, 035303. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Mallouk, T.E. A Practical Guide to Analyzing and Reporting the Movement of Nanoscale Swimmers. ACS Nano 2021, 15, 15446–15460. [Google Scholar] [CrossRef] [PubMed]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Wei, Y.; Zhang, H.; Huang, Z.; Zhu, S.; Zhao, Z.; Guo, Y.; Fu, H.; Zhao, Q.; Cai, W. Surface Roughening of Pt-Polystyrene Spherical Janus Micromotors for Enhanced Motion Speed. Micromachines 2022, 13, 555. https://doi.org/10.3390/mi13040555
Zhou L, Wei Y, Zhang H, Huang Z, Zhu S, Zhao Z, Guo Y, Fu H, Zhao Q, Cai W. Surface Roughening of Pt-Polystyrene Spherical Janus Micromotors for Enhanced Motion Speed. Micromachines. 2022; 13(4):555. https://doi.org/10.3390/mi13040555
Chicago/Turabian StyleZhou, Le, Yi Wei, Hongwen Zhang, Zhulin Huang, Shuyi Zhu, Zhipeng Zhao, Yujing Guo, Hao Fu, Qian Zhao, and Weiping Cai. 2022. "Surface Roughening of Pt-Polystyrene Spherical Janus Micromotors for Enhanced Motion Speed" Micromachines 13, no. 4: 555. https://doi.org/10.3390/mi13040555