
Review of Ultrasonic Ranging Methods and Their Current Challenges


Abstract
:1. Introduction
2. Transducer and Ultrasonic Characteristics Related to Ranging
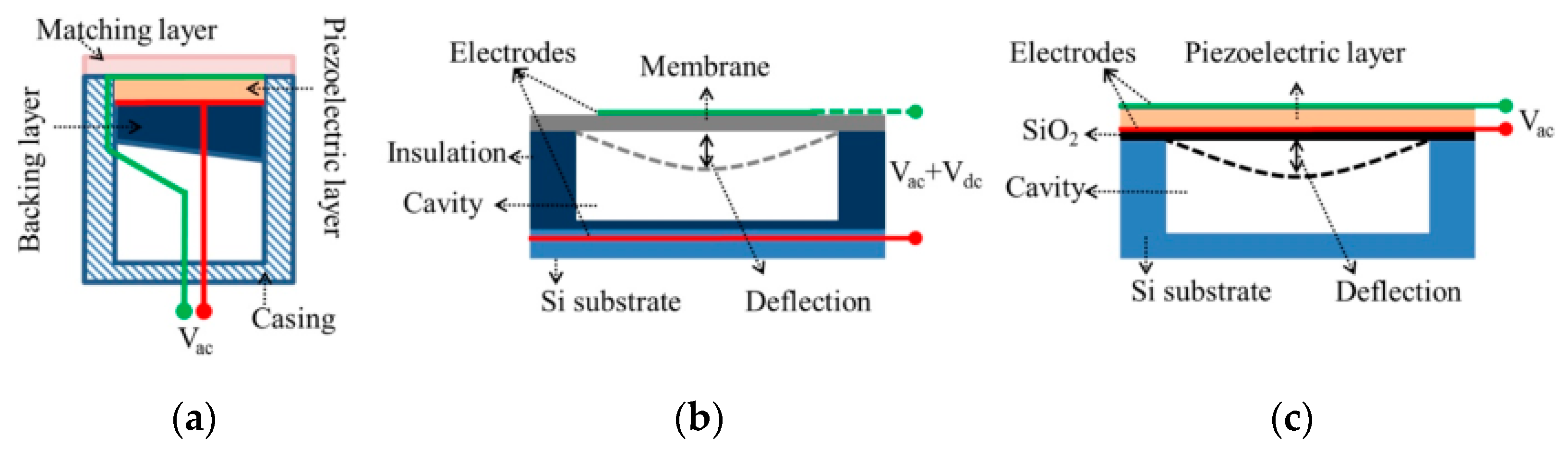
2.1. Comparison of Different Transducers
2.2. Transducer Characteristics
2.2.1. Frequency Characteristics
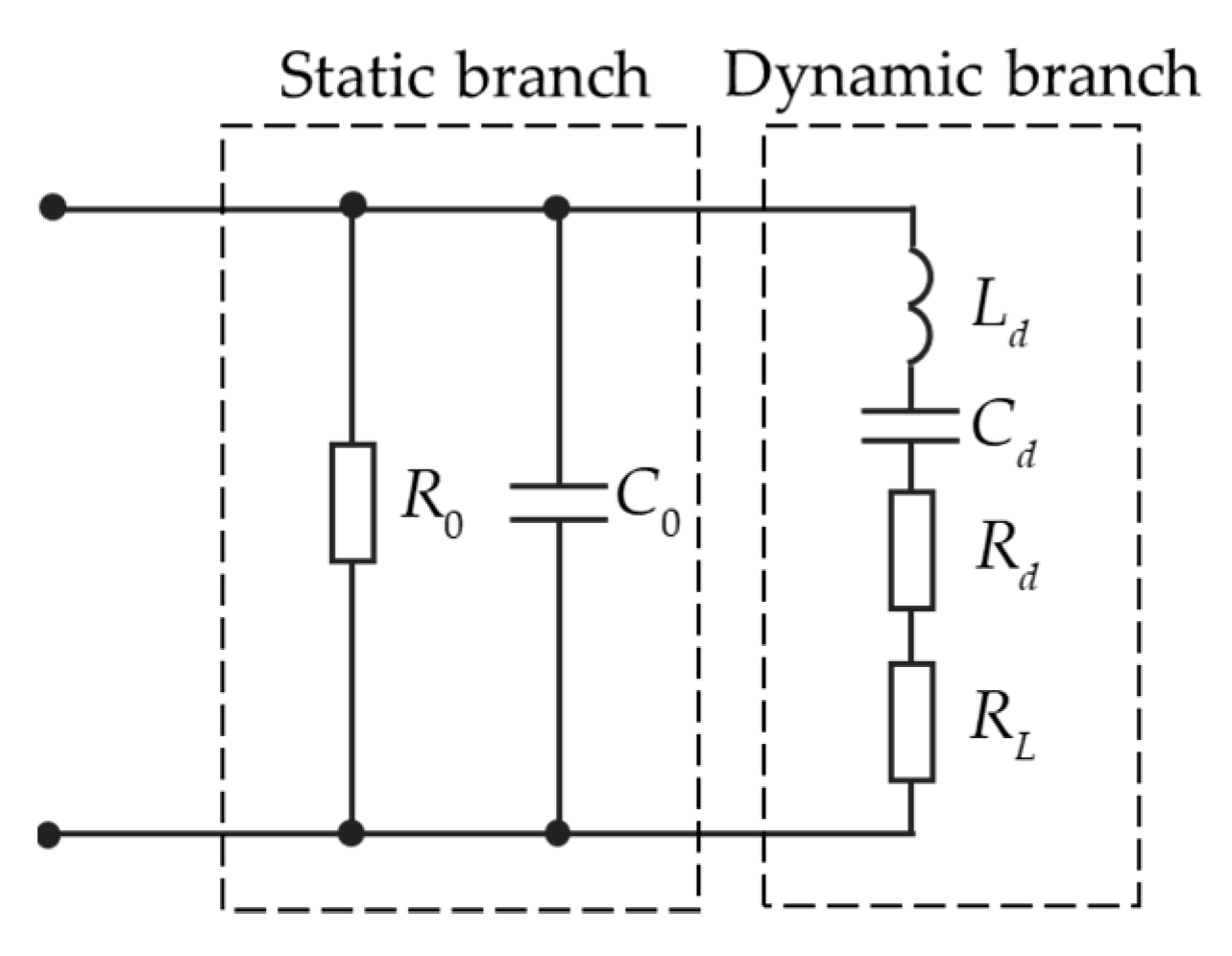
2.2.2. Impedance
2.2.3. Electromechanical Coupling Coefficient
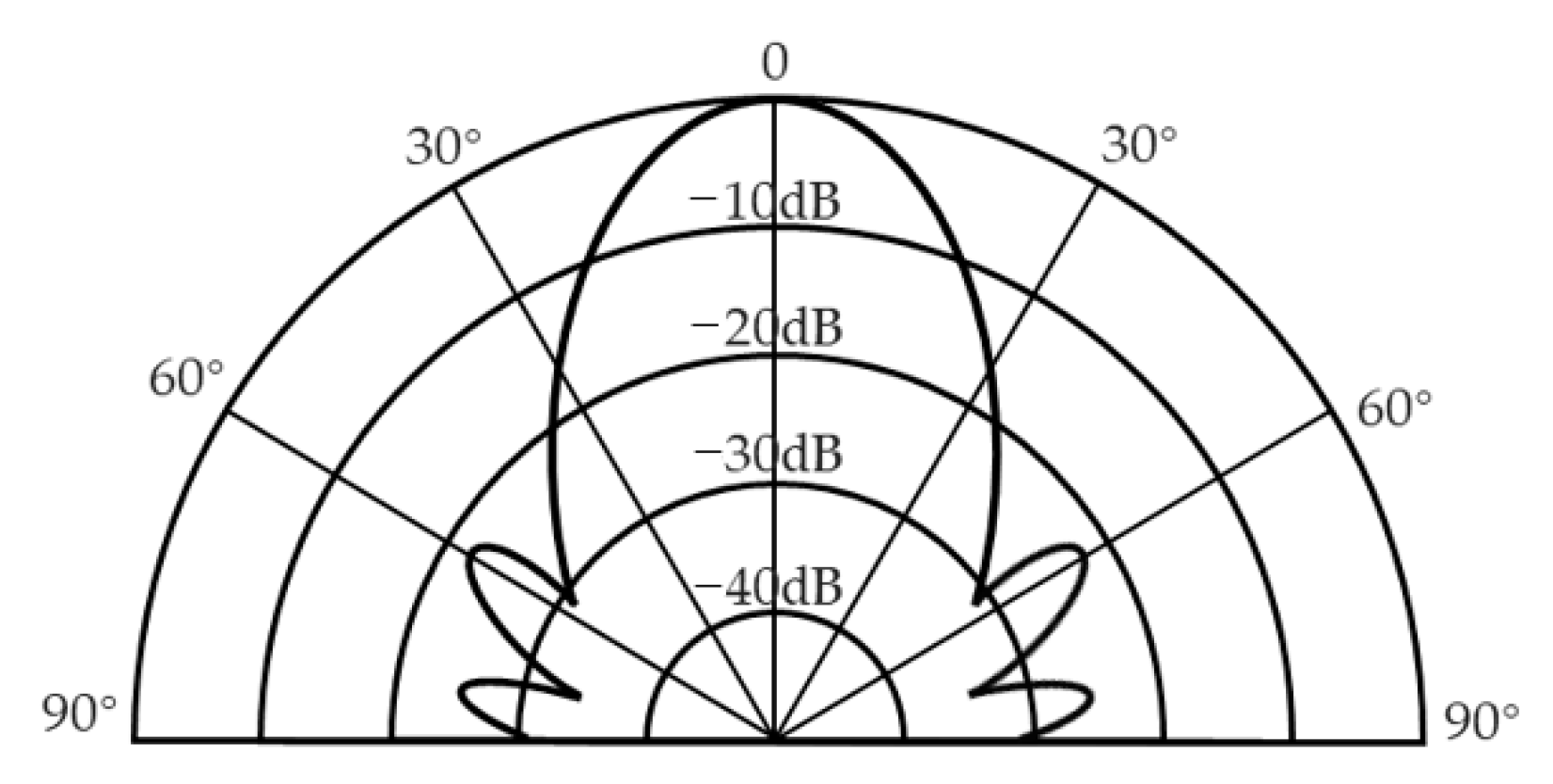
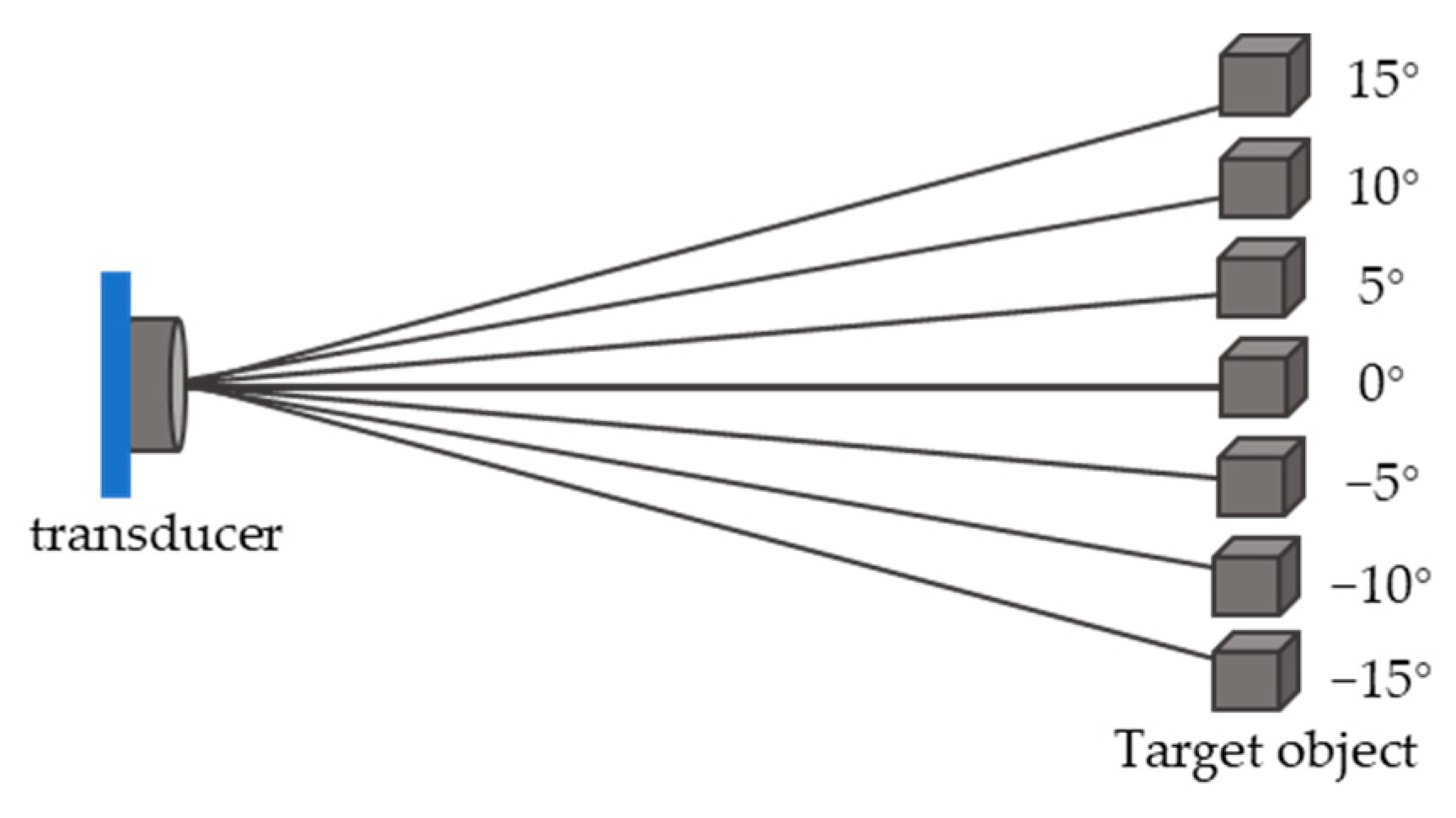
2.2.4. Directivity
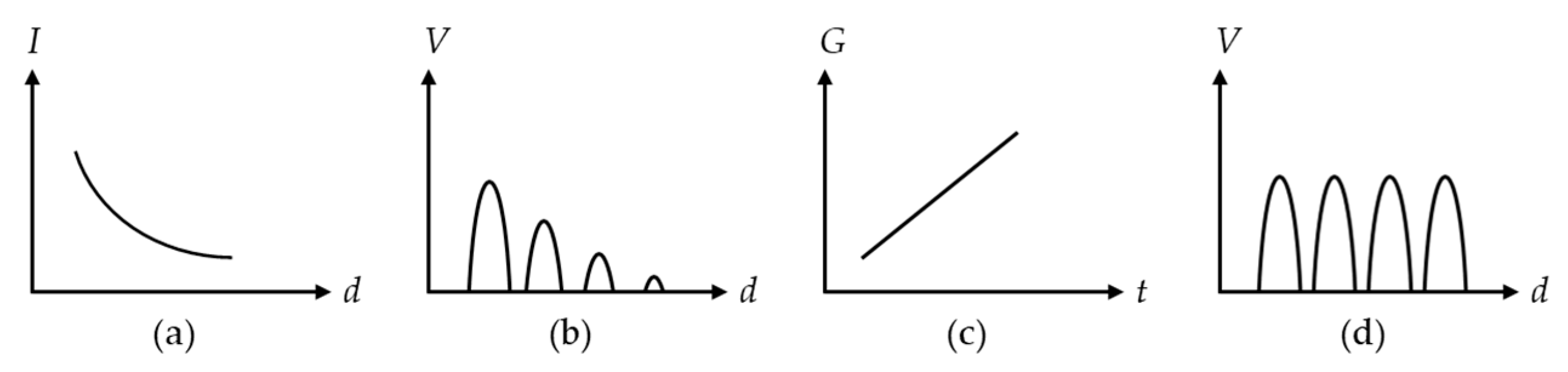
2.3. Ultrasonic Propagation Characteristics
3. Ultrasonic Ranging System and Its Evaluation Parameters
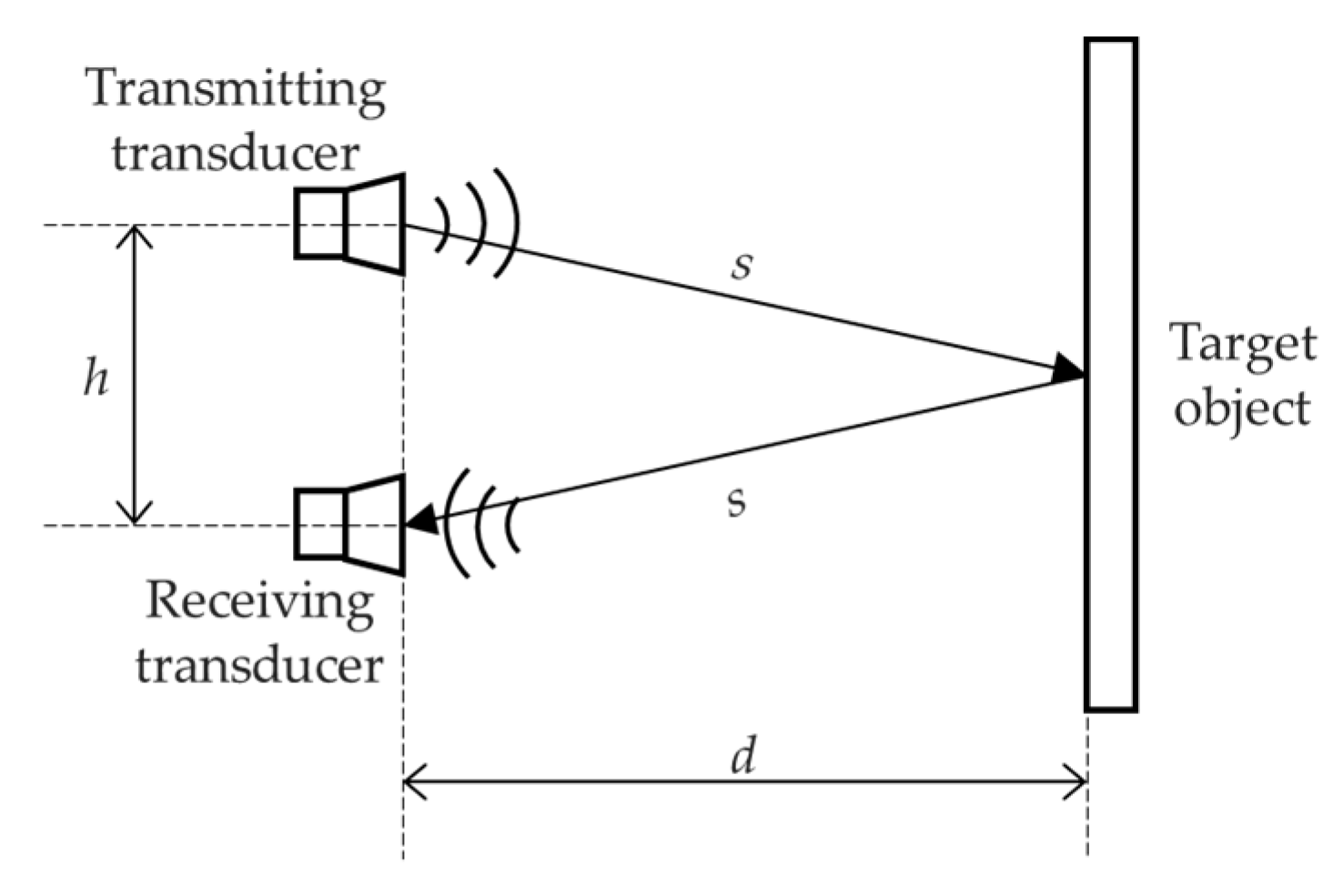
3.1. Principle of Ultrasonic Ranging
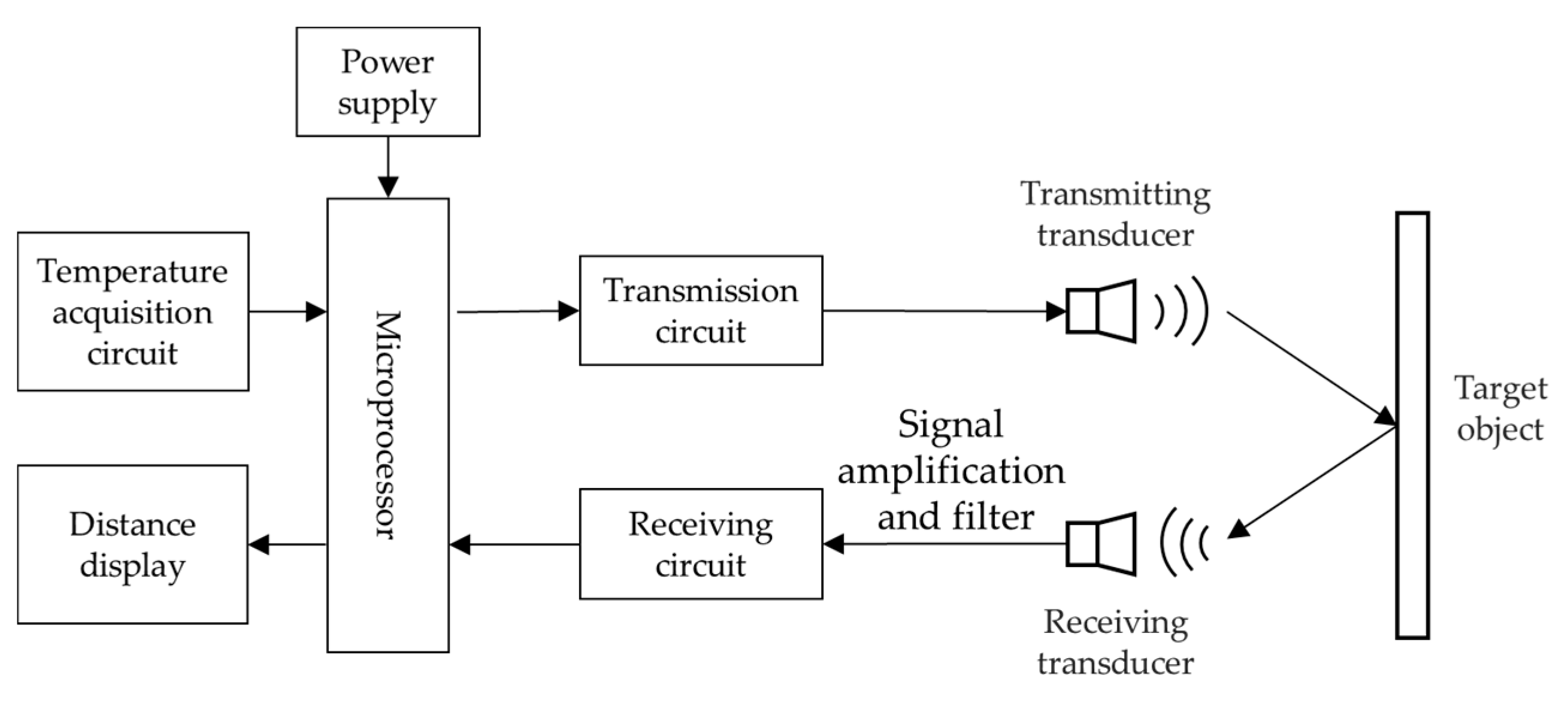
3.2. Composition of Ultrasonic Ranging System
3.3. Evaluation Parameters of Ranging System
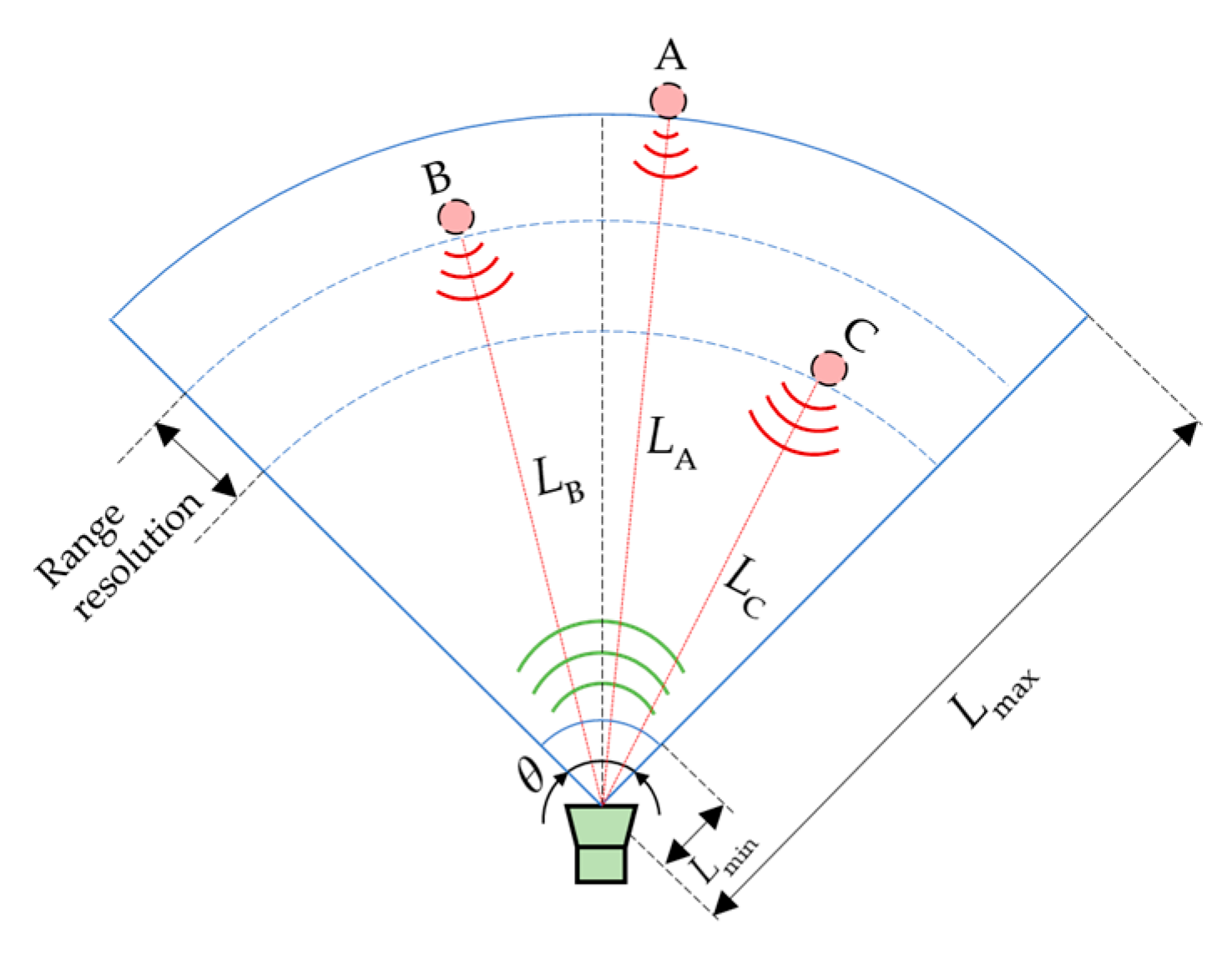
3.3.1. Measurement Range of Distances and Angles
3.3.2. Measurement Accuracy of Ultrasonic Ranging System
3.3.3. Measurement Rate
4. Ultrasonic Ranging Methods and Signal Processing
4.1. Time of Flight (ToF) Method
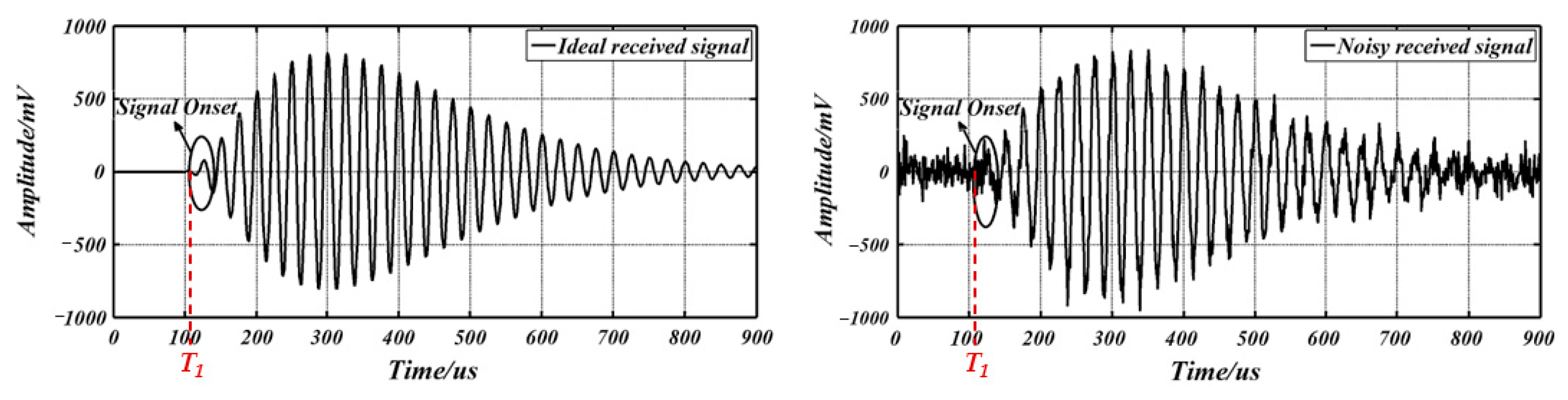
4.1.1. Amplitude Threshold Method (ATM)
4.1.2. Envelope Fitting Method
4.1.3. Correlation Method
4.2. Two Frequency Continuous Wave (TFCW) and Multi-Frequency Continuous Waves (MFCW)
4.2.1. Two Frequency Continuous Wave (TFCW)
| Algorithm 1 |
| 1: If , |
| 2: If , |
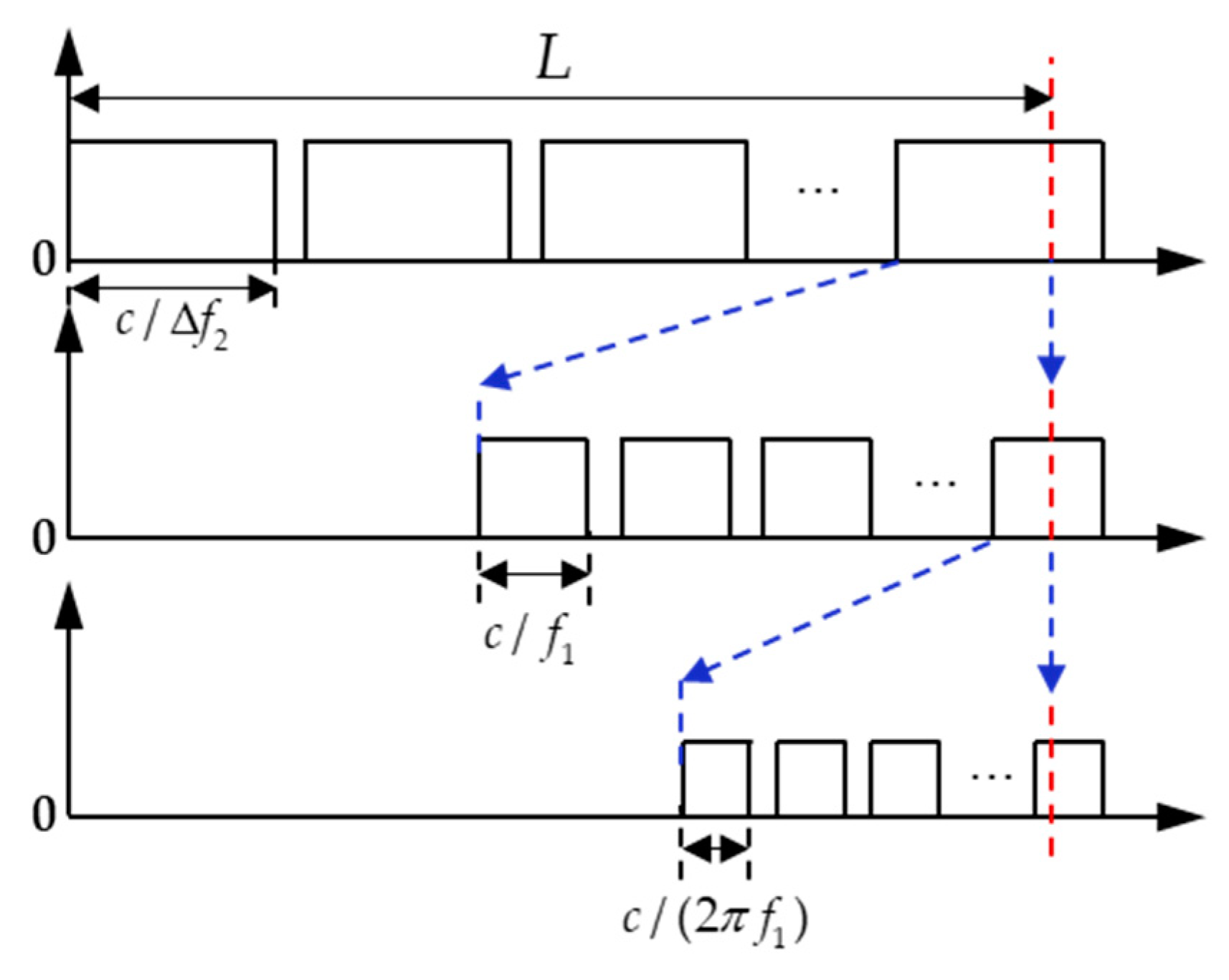
4.2.2. Multi-Frequency Continuous Waves (MFCW)
4.3. Signal Modulation Method
4.3.1. Binary Frequency Shift Keying (BFSK)
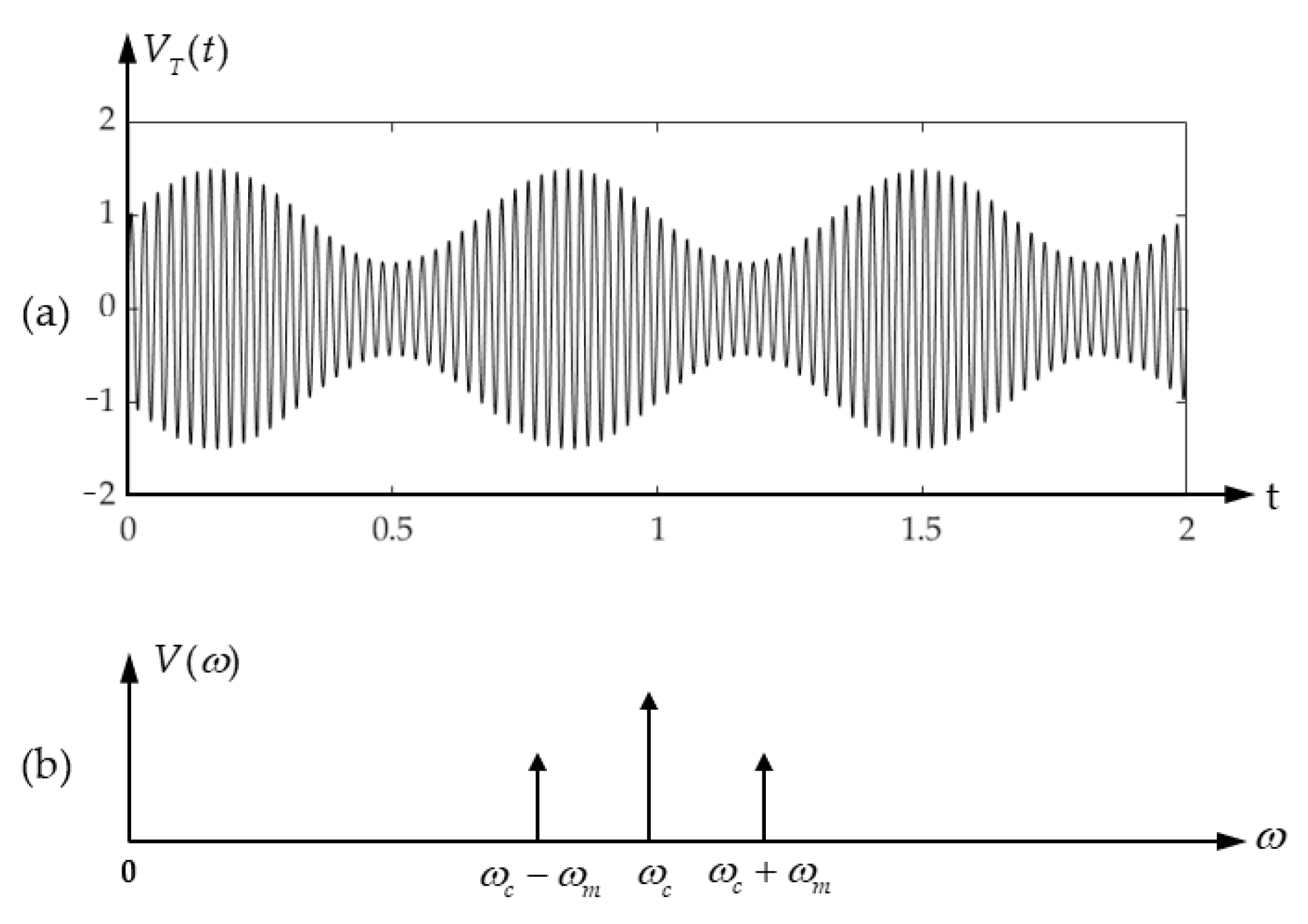
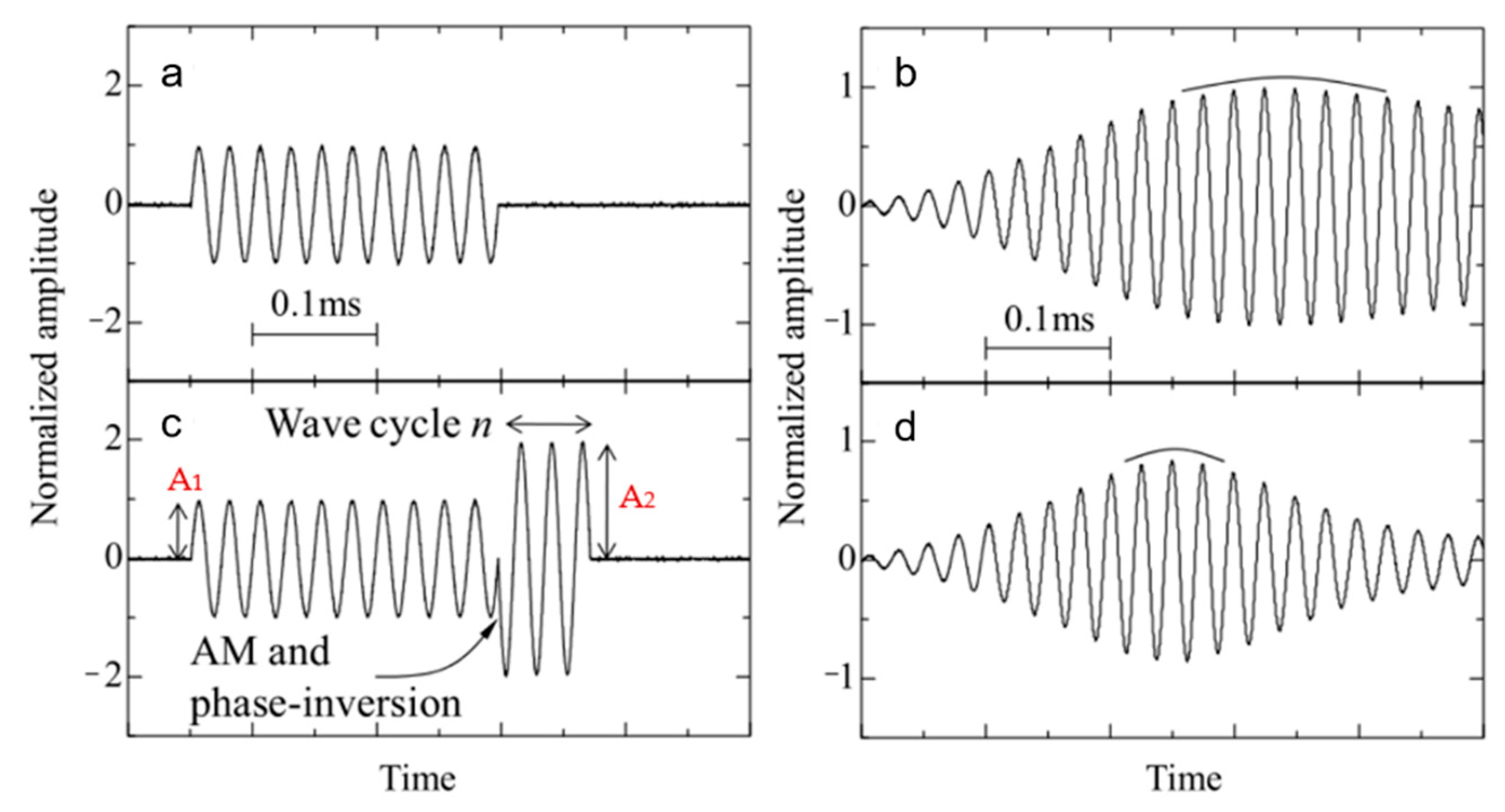
4.3.2. Amplitude Modulation (AM) Method
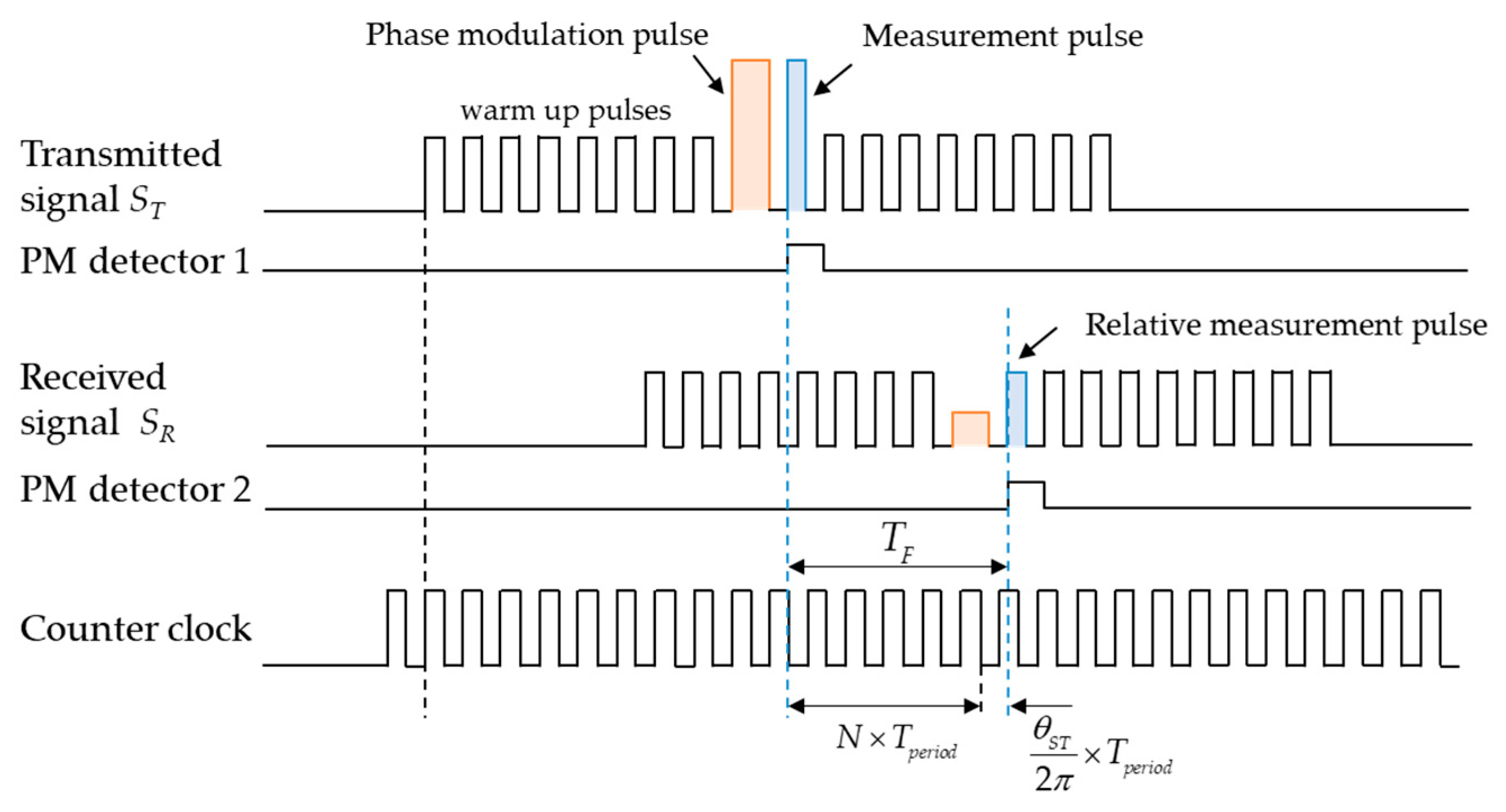
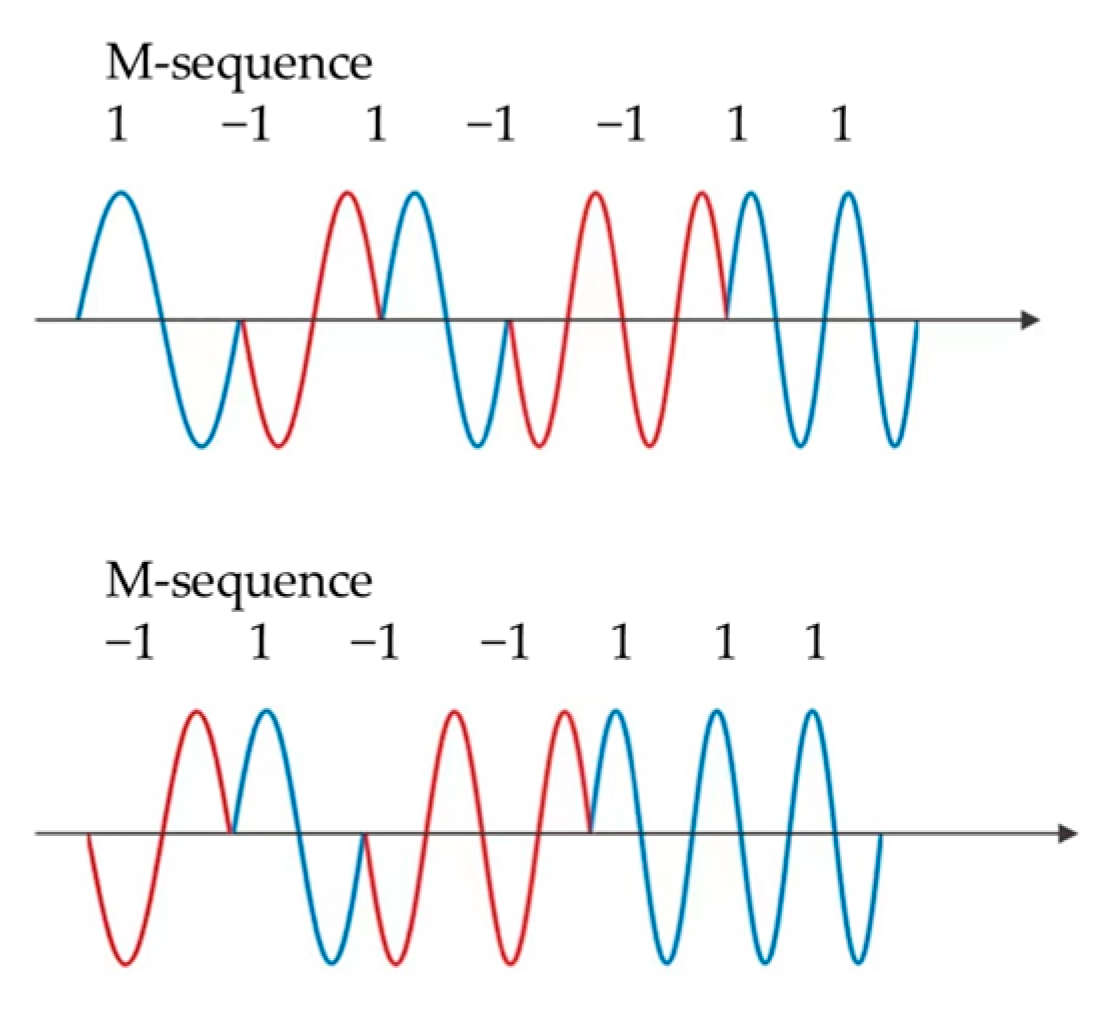
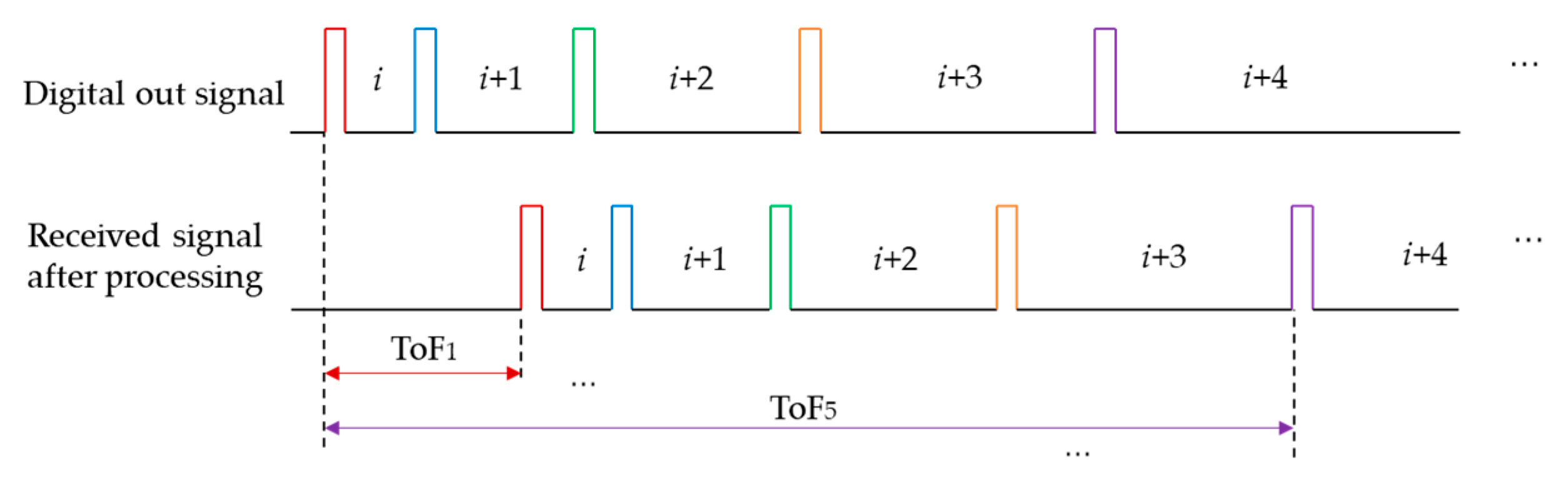
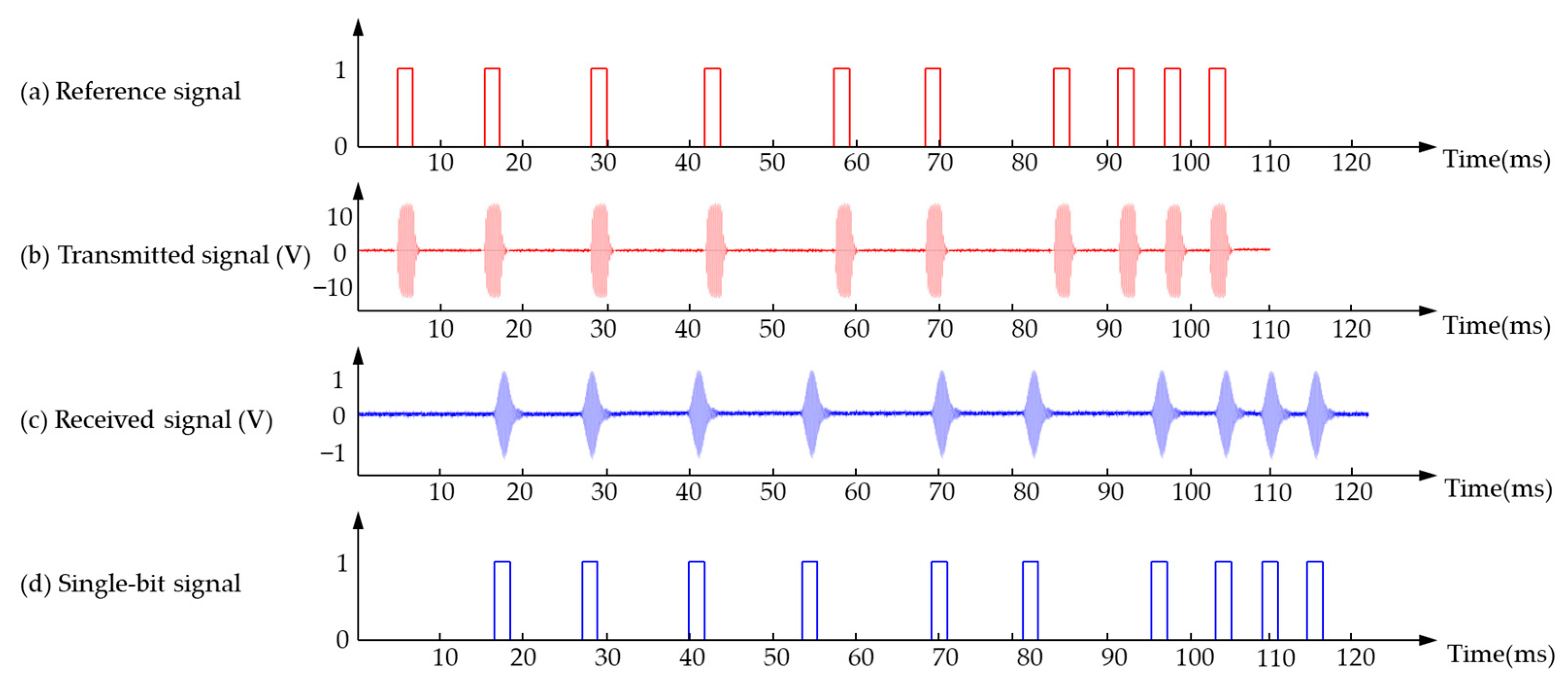
4.3.3. Coded Signal Excitation Method
5. Ranging Error Analysis and Compensation
5.1. System Acquisition Error and Compensation
5.2. Environmental Error and Compensation
6. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Ashhar, K.; Noor-A-Rahim, M.; Khyam, M.O.; Soh, C.B. A Narrowband Ultrasonic Ranging Method for Multiple Moving Sensor Nodes. IEEE Sens. J. 2019, 19, 6289–6297. [Google Scholar] [CrossRef]
- Wang, J.; Kong, X.; Cheng, G.; Chen, Y. Research on Detection Range Prediction for Oversea Wide-aperture Towed Sonar. In Proceedings of the 2021 OES China Ocean Acoustics (COA 2021), Harbin, China, 14–17 July 2021. [Google Scholar] [CrossRef]
- Lee, W.; Roh, Y. Ultrasonic transducers for medical diagnostic imaging. Biomed. Eng. Lett. 2017, 7, 91–97. [Google Scholar] [CrossRef] [PubMed]
- Sheng, J.; Zhao, Y.; Qiao, Y.; Ling, J.; Fu, J.; Yang, Y.; Ren, T. The manufacture and characterization of a novel ultrasonic transducer for medical imaging. In Proceedings of the 5th IEEE Electron Devices Technology and Manufacturing Conference (EDTM), Chengdu, China, 8–11 April 2021. [Google Scholar] [CrossRef]
- Guangzhen, X.; Volker, W.; Ping, Y. Review of field characterization techniques for high intensity therapeutic ultrasound. Metrologia 2021, 58, 22001. [Google Scholar] [CrossRef]
- Park, S.H.; Choi, S.; Jhang, K.Y. Porosity Evaluation of Additively Manufactured Components Using Deep Learning-based Ultrasonic Nondestructive Testing. Int. J. Precis. Eng. Manuf. Green Technol. 2021, 9, 395–407. [Google Scholar] [CrossRef]
- Pan, Q.; Pan, R.; Shao, C.; Chang, M.; Xu, X. Research Review of Principles and Methods for Ultrasonic Measurement of Axial Stress in Bolts. Chin. J. Mech. Eng. Engl. Ed. 2020, 33, 11. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.J.; Kamaraj, A.; Sundaram, K.C.; Shobana, G.; Kirubakaran, G. A comprehensive review on accuracy in ultrasonic flow measurement using reconfigurable systems and deep learning approaches. AIP Adv. 2020, 10, 105221. [Google Scholar] [CrossRef]
- Fang, Z.; Su, R.; Hu, L.; Fu, X. A simple and easy-implemented time-of-flight determination method for liquid ultrasonic flow meters based on ultrasonic signal onset detection and multiple-zero-crossing technique. Measurement 2021, 168, 108398. [Google Scholar] [CrossRef]
- Fu, D.; Zhao, Z. Moving Object Tracking Method Based on Ultrasonic Automatic Detection Algorithm. In Proceedings of the 6th International Conference on Information Science and Technology (ICIST), Dalian, China, 6–8 May 2016. [Google Scholar] [CrossRef]
- Allevato, G.; Hinrichs, J.; Rutsch, M.; Adler, J.P.; Jager, A.; Pesavento, M.; Kupnik, M. Real-Time 3-D Imaging Using an Air-Coupled Ultrasonic Phased-Array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 796–806. [Google Scholar] [CrossRef]
- Carotenuto, R.; Merenda, M.; Iero, D.; Della Corte, F.G. Mobile Synchronization Recovery for Ultrasonic Indoor Positioning. Sensors 2020, 20, 702. [Google Scholar] [CrossRef] [Green Version]
- Patkar, A.R.; Tasgaonkar, P.P. Object Recognition Using Horizontal Array of Ultrasonic Sensors. In Proceedings of the IEEE International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, Tamilnadu, India, 6–8 April 2016. [Google Scholar] [CrossRef]
- Xia, M.; Xiu, C.; Yang, D.; Wang, L. Performance Enhancement of Pedestrian Navigation Systems Based on Low-Cost Foot-Mounted MEMS-IMU/Ultrasonic Sensor. Sensors 2019, 19, 364. [Google Scholar] [CrossRef] [Green Version]
- Ge, R.; Aa, G. Ultrasonic ranging in air. Meas. Tech. 1969, 12, 1675–1678. [Google Scholar]
- Hoffstatter, G. Using the polaroid ultrasonic ranging system. Rob. Age 1984, 6, 35–37. [Google Scholar]
- Jaffe, D.L. Polaroid ultrasonic ranging sensors in robotic applications. Rob. Age 1985, 7, 23–25, 27–30. [Google Scholar]
- Borenstein, J.; Koren, Y. Obstacle avoidance with ultrasonic with ultrasonic sensors. IEEE J. Rob. Autom. 1988, 4, 213–218. [Google Scholar] [CrossRef]
- Fiorillo, A.S.; Allotta, B.; Dario, P.; Francesconi, R. Ultrasonic range sensor array for a robotic fingertip. Sens. Actuators 1989, 17, 103–106. [Google Scholar] [CrossRef]
- Yang, M.; Hill, S.L.; Gray, J.O. Design of ultrasonic linear array system for multi-object identification. IEEE Int. Conf. Intell. Rob. Syst. 1992, 3, 1625–1632. [Google Scholar] [CrossRef]
- Tanaka, S.; Jiang, J.; Takesue, T. A model-based adaptive algorithm for determination of time-of-flight in ultrasonic measurement. In Proceedings of the 1997 36th SICE Annual Conference, Tokushima, Japan, 29–31 July 1997. [Google Scholar] [CrossRef]
- Tardajos, G.; Gonzalez Gaitano, G.; Montero De Espinosa, F.R. Accurate, sensitive, and fully automatic method to measure sound velocity and attenuation. Rev. Sci. Instrum. 1994, 65, 2933–2938. [Google Scholar] [CrossRef]
- Huang, C.F.; Young, M.S.; Li, Y.C. Multiple-frequency continuous wave ultrasonic system for accurate distance measurement. Rev. Sci. Instrum. 1999, 70, 1452–1458. [Google Scholar] [CrossRef]
- Webster, D. A pulsed ultrasonic distance measurement system based upon phase digitizing. IEEE Trans. Instrum. Meas. 1994, 43, 578–582. [Google Scholar] [CrossRef]
- Yang, M.; Hill, S.L.; Bury, B.; Gray, J.O. A multifrequency AM-based ultrasonic system for accuracy distance measurement. IEEE Trans. Instrum. Meas. 1994, 43, 861–866. [Google Scholar] [CrossRef]
- Barshan, B. Fast processing techniques for accurate ultrasonic range measurements. Meas. Sci. Technol. 2000, 11, 45–50. [Google Scholar] [CrossRef]
- Carullo, A.; Parvis, M. An ultrasonic sensor for distance measurement in automotive applications. IEEE Sens. J. 2001, 1, 143–147. [Google Scholar] [CrossRef] [Green Version]
- Al-Smadi, A.M.; Al-Ksasbeh, W.; Ababneh, M.; Al-Nsairat, M. Intelligent Automobile Collision Avoidance and Safety System. In Proceedings of the 17th International Multi-Conference on Systems, Signals and Devices (SSD), Sfax, Tunisia, 20–23 July 2020. [Google Scholar] [CrossRef]
- Jiménez, F.; Naranjo, J.; Gómez, O.; Anaya, J. Vehicle Tracking for an Evasive Manoeuvres Assistant Using Low-Cost Ultrasonic Sensors. Sensors 2014, 14, 22689–22705. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, M.; Park, J.; Choi, S. Road Type Identification Ahead of the Tire Using D-CNN and Reflected Ultrasonic Signals. Int. J. Automot. Technol. 2021, 22, 47–54. [Google Scholar] [CrossRef]
- Singh, J.; Dhuheir, M.; Refaey, A.; Erbad, A.; Mohamed, A.; Guizani, M. Navigation and Obstacle Avoidance System in Unknown Environment. In Proceedings of the IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), London, ON, Canada, 30 August–2 September 2020. [Google Scholar] [CrossRef]
- Anis, H.; Fadhillah, A.H.I.; Darma, S.; Soekirno, S. Automatic Quadcopter Control Avoiding Obstacle Using Camera with Integrated Ultrasonic Sensor. In Proceedings of the International Conference on Theoretical and Applied Physics (ICTAP), Yogyakarta, Indonesia, 6–8 September 2017. [Google Scholar] [CrossRef]
- Jianwei, Z.; Jianhua, F.; Shouzhong, W.; Kun, W.; Chengxiang, L.; Tao, H. Obstacle Avoidance of Multi-Sensor Intelligent Robot Based on Road Sign Detection. Sensors 2021, 21, 6777. [Google Scholar] [CrossRef]
- Hamanaka, M.; Nakano, F. Surface-Condition Detection System of Drone-Landing Space using Ultrasonic Waves and Deep Learning. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020. [Google Scholar] [CrossRef]
- Hsu, C.; Chen, H.; Lai, C. An Improved Ultrasonic-Based Localization Using Reflection Method. In Proceedings of the International Asia Conference on Informatics in Control, Automation and Robotics, Bangkok, Thailand, 1 February–2 September 2009. [Google Scholar] [CrossRef]
- Kim, S.J.; Kim, B.K. Dynamic localization based on EKF for indoor mobile robots using discontinuous ultrasonic distance measurements. In Proceedings of the International Conference on Control, Automation and Systems (ICCAS), Gyeonggi do, South Korea, 27–30 October 2010. [Google Scholar] [CrossRef]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor Positioning: A Review of Indoor Ultrasonic Positioning systems. In Proceedings of the 15th International Conference on Advanced Communications Technology (ICACT), PyeongChang, Korea, 27–30 January 2013. [Google Scholar]
- Wang, R.; Chen, L.; Wang, J.; Zhang, P.; Tan, Q.; Pan, D. Research on autonomous navigation of mobile robot based on multi ultrasonic sensor fusion. In Proceedings of the IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 14–16 December 2018. [Google Scholar] [CrossRef]
- Ju, X.T.; Gu, L.C. Long-Distance Ultrasonic Ranging System Oriented to Tower Crane Anti-Collision. In Proceedings of the 2nd International Conference on Machine Design and Manufacturing Engineering (ICMDME), Jeju Island, Korea, 1–2 May 2013. [Google Scholar] [CrossRef]
- Przybyla, R.J.; Shelton, S.E.; Guedes, A.; Izyumin, I.I.; Kline, M.H.; Horsley, D.A.; Boser, B.E. In-Air Rangefinding with an AlN Piezoelectric Micromachined Ultrasound Transducer. IEEE Sens. J. 2011, 11, 2690–2697. [Google Scholar] [CrossRef]
- Saad, M.; Bleakley, C.J.; Nigram, V.; Kettle, P. Ultrasonic hand gesture recognition for mobile devices. J. Multimodal User Interfaces 2018, 12, 31–39. [Google Scholar] [CrossRef]
- Wang, Z.; Hou, Y.; Jiang, K.; Dou, W.; Zhang, C.; Huang, Z.; Guo, Y. Hand Gesture Recognition Based on Active Ultrasonic Sensing of Smartphone: A Survey. IEEE Access 2019, 7, 111897–111922. [Google Scholar] [CrossRef]
- Ling, K.; Dai, H.; Liu, Y.; Liu, A.X.; Wang, W.; Gu, Q. UltraGesture: Fine-Grained Gesture Sensing and Recognition. IEEE T. Mobile Comput. 2020. [Google Scholar] [CrossRef]
- Wang, T.; Lee, C. Zero-Bending Piezoelectric Micromachined Ultrasonic Transducer (pMUT) with Enhanced Transmitting Performance. J. Microelectromech. Syst. 2015, 24, 2083–2091. [Google Scholar] [CrossRef]
- Yano, T.; Tone, M.; Fukumoto, A. Range Finding and Surface Characterization Using High-Frequency Air Transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1987, 34, 232–236. [Google Scholar] [CrossRef] [PubMed]
- Toda, M. New type of matching layer for air-coupled ultrasonic transducers. IEEE Trans. Ultrason. Ferr. 2002, 49, 972–979. [Google Scholar] [CrossRef] [PubMed]
- Alvarez-Arenas, T. Acoustic impedance matching of piezoelectric transducers to the air. IEEE Trans. Ultrason. Ferr. 2004, 51, 624–633. [Google Scholar] [CrossRef]
- Kelly, S.; Hayward, G.; Alvarez-Arenas, T. Characterization and assessment of an integrated matching layer for air-coupled ultrasonic applications. IEEE Trans. Ultrason. Ferr. 2004, 51, 1314–1323. [Google Scholar] [CrossRef]
- Alvarez-Arenas, T. Air-Coupled Piezoelectric Transducers with Active Polypropylene Foam Matching Layers. Sensors 2013, 13, 5996–6013. [Google Scholar] [CrossRef] [Green Version]
- Ealo, J.L.; Seco, F.; Prieto, C.; Jimenez, A.R.; Roa, J.; Koutsou, A.; Guevara, J. Customizable Field Airborne Ultrasonic Transducers based on Electromechanical Film. In Proceedings of the IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008. [Google Scholar] [CrossRef]
- Dausch, D.E.; Castellucci, J.B.; Chou, D.R.; von Ramm, O.T. Theory and operation of 2-D array piezoelectric micromachined ultrasound transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2484–2492. [Google Scholar] [CrossRef]
- Brenner, K.; Ergun, A.; Firouzi, K.; Rasmussen, M.; Stedman, Q.; Khuri Yakub, B. Advances in Capacitive Micromachined Ultrasonic Transducers. Micromachines 2019, 10, 152. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Gigliotti, J.V.; Wallace, M.; Griggio, F.; Demore, C.E.M.; Cochran, S.; Trolier-Mckinstry, S. Piezoelectric Micromachined Ultrasound Transducer (PMUT) Arrays for Integrated Sensing, Actuation and Imaging. Sensors 2015, 15, 8020–8041. [Google Scholar] [CrossRef] [Green Version]
- Yaralioglu, G.G.; Ergun, A.S.; Bayram, B.; Haeggstrom, E.; Khuri-Yakub, B.T. Calculation and measurement of electromechanical coupling coefficient of capacitive micromachined ultrasonic transducers. EEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 449–456. [Google Scholar] [CrossRef]
- Oralkan, O.; Ergun, A.S.; Johnson, J.A.; Karaman, M.; Demirci, U.; Kaviani, K.; Lee, T.H.; Khuri-Yakub, B.T. Capacitive micromachined ultrasonic transducers: Next-generation arrays for acoustic imaging? IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 1596–1610. [Google Scholar] [CrossRef]
- Wygant, I.; Kupnik, M.; Windsor, J.; Wright, W.; Khuri-Yakub, B.T. 50 kHz capacitive micromachined ultrasonic transducers for generation of highly directional sound with parametric arrays. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 193–203. [Google Scholar] [CrossRef] [PubMed]
- Paul, M.; Nicolas, L.; Jacek, B.; Abdoighaffar, B.; Sandrine, G.; Brahim, B.; Sylvain, P.; Alain, B.; Nava, S. Piezoelectric Micromachined Ultrasonic Transducers Based on PZT Thin Films. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 2276–2288. [Google Scholar]
- Robichaud, A.; Deslandes, D.; Cicek, P.; Nabki, F. A System in Package Based on a Piezoelectric Micromachined Ultrasonic Transducer Matrix for Ranging Applications. Sensors 2021, 21, 2590. [Google Scholar] [CrossRef] [PubMed]
- Kaajakari, V.; Mattila, T.; Oja, A.; Seppa, H. Nonlinear limits for single-crystal silicon microresonators. J. Microelectromech. Syst. 2004, 13, 715–724. [Google Scholar] [CrossRef] [Green Version]
- Przybyla, R.J.; Shelton, S.E.; Guedes, A.; Krigel, R.; Horsley, D.A.; Boser, B.E. In-air ultrasonic rangefinding and angle estimation using an array of aln micromachined transducers. In Proceedings of the Solid-State Sensors, Actuators and Microsystems Workshop, Hilton Head, SC, USA, 3–7 June 2012. [Google Scholar] [CrossRef]
- Jung, J.; Lee, W.; Kang, W.; Shin, E.; Ryu, J.; Choi, H. Review of piezoelectric micromachined ultrasonic transducers and their applications. J. Micromech. Microeng. 2017, 27, 113001. [Google Scholar] [CrossRef]
- Przybyla, R.J.; Tang, H.; Guedes, A.; Shelton, S.E.; Horsley, D.A.; Boser, B.E. 3D Ultrasonic Rangefinder on a Chip. IEEE J. Solid-St. Circ. 2015, 50, 320–334. [Google Scholar] [CrossRef]
- Przybyla, R.; Flynn, A.; Jain, V.; Shelton, S.; Guedes, A.; Izyumin, I.; Horsley, D.; Boser, B. A micromechanical ultrasonic distance sensor with >1 m range. In Proceedings of the 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011. [Google Scholar] [CrossRef]
- Li, H.; Lv, J.; Li, D.; Xiong, C.; Zhang, Y.; Yu, Y. MEMS-on-fiber ultrasonic sensor with two resonant frequencies for partial discharges detection. Opt. Express 2020, 28, 18431–18439. [Google Scholar] [CrossRef]
- Rocchi, A.; Santecchia, E.; Ciciulla, F.; Mengucci, P.; Barucca, G. Characterization and Optimization of Level Measurement by an Ultrasonic Sensor System. IEEE Sens. J. 2019, 19, 3077–3084. [Google Scholar] [CrossRef]
- Zhang, J.; Long, Z.; Ma, W.; Hu, G.; Li, Y. Electromechanical Dynamics Model of Ultrasonic Transducer in Ultrasonic Machining Based on Equivalent Circuit Approach. Sensors 2019, 19, 1405. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Huang, S.H.; Li, W. Electrical Impedance Matching between Piezoelectric Transducer and Power Amplifier. IEEE Sens. J. 2020, 20, 14273–14281. [Google Scholar] [CrossRef]
- Garcia-Rodriguez, M.; Garcia-Alvarez, J.; Yañez, Y.; Garcia-Hernandez, M.J.; Salazar, J.; Turo, A.; Chavez, J.A. Low cost matching network for ultrasonic transducers. Phys. Procedia 2010, 3, 1025–1031. [Google Scholar] [CrossRef] [Green Version]
- Rathod, V.T. A Review of Electric Impedance Matching Techniques for Piezoelectric Sensors, Actuators and Transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- Ling, J.; Chen, Y.; Chen, Y.; Wang, D.; Zhao, Y.; Pang, Y.; Yang, Y.; Ren, T. Design and Characterization of High-Density Ultrasonic Transducer Array. IEEE Sens. J. 2018, 18, 2285–2290. [Google Scholar] [CrossRef]
- Arman, H.; Dimitre, L.; Deane, D.G.; Azadeh, H.; Darren, I.; Marc, T.; Martin, S. Three-dimensional micro electromechanical system piezoelectric ultrasound transducer. Appl. Phys. Lett. 2013, 101, 253101. [Google Scholar] [CrossRef] [Green Version]
- Kang, L.; Feeney, A.; Dixon, S. The High Frequency Flexural Ultrasonic Transducer for Transmitting and Receiving Ultrasound in Air. IEEE Sens. J. 2020, 20, 7653–7660. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Wang, X.; He, C.; Xue, C. Investigation and analysis of the influence of excitation signal on radiation characteristics of capacitive micromachined ultrasonic transducer. Microsyst. Technol. 2018, 24, 2999–3018. [Google Scholar] [CrossRef] [Green Version]
- Pop, F.; Herrera, B.; Cassella, C.; Rinaldi, M. Modeling and Optimization of Directly Modulated Piezoelectric Micromachined Ultrasonic Transducers. Sensors 2021, 21, 157. [Google Scholar] [CrossRef]
- Krishnakumar, R.; Ramesh, R. Enhancing the Performance Characteristics of Piezoelectric Transducers by Broadband Tuning. IEEE Sens. J. 2021, 21, 21667–21674. [Google Scholar] [CrossRef]
- Blackstock, D.T. Fundamentals of Physical Acoustics; John Wiley and Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Tiwari, K.; Raisutis, R.; Mazeika, L.; Samaitis, V. 2D Analytical Model for the Directivity Prediction of Ultrasonic Contact Type Transducers in the Generation of Guided Waves. Sensors 2018, 18, 987. [Google Scholar] [CrossRef] [Green Version]
- Okamoto, K.; Okubo, K. Development of omnidirectional audible sound source using facing ultrasonic transducer arrays driven at different frequencies. Jpn. J. Appl. Phys. 2021, 60, SDDD17. [Google Scholar] [CrossRef]
- Wang, H.; Wang, X.; He, C.; Xue, C. Design and Performance Analysis of Capacitive Micromachined Ultrasonic Transducer Linear Array. Micromachines 2014, 5, 420–431. [Google Scholar] [CrossRef] [Green Version]
- Xiang, R.; Shi, Z. Design of Millimeter Range High Precision Ultrasonic Distance Measurement System. In Proceedings of the International Conference on Computer Systems, Electronics and Control (ICCSEC), Dalian, China, 25–27 December 2017. [Google Scholar] [CrossRef]
- Fu, X.C.; Zhou, L.; Wen, G.J. Ultrasonic Ranging System Based on Single Chip Microprocessor. Appl. Mech. Mater. 2013, 441, 360–363. [Google Scholar] [CrossRef]
- Zhao, X.; Qian, P.; Lu, N.; Li, Y. Design and Experimental Study of High Precision Ultrasonic Ranging System. In Proceedings of the 5th International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS), Naha, Japan, 18–20 November 2020. [Google Scholar] [CrossRef]
- Xiao, Z.H.; Wu, S.Y.; An, Q.Y. Design of Ultrasonic Distance Measurement System Based on Microcontroller. Appl. Mech. Mater. 2013, 333–335, 296–299. [Google Scholar] [CrossRef]
- Tai, H.; Zhang, H. The hardware research of ultrasonic ranging system based on variable emission wavelength. In Proceedings of the IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019. [Google Scholar] [CrossRef]
- Cabral, E.A.V.; Valdez, I. Airborne ultrasonic sensor node for distance measurement. In Proceedings of the 12th IEEE Sensors Conference, Baltimore, MD, USA, 3–6 November 2013. [Google Scholar] [CrossRef]
- Zhi, S.; Yi, Y.; Wang, Z. Design of Distance Measuring and Reversing System. In Proceedings of the IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018. [Google Scholar] [CrossRef]
- Lu, H.; Li, Z.; Gao, P. Design of Ultrasonic Ranging System Based on Cross-correlation Method. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar] [CrossRef]
- Jiang, Y.; Yuan, M. The study of improving ultrasonic ranging accuracy based on the double closed-loop control technology. In Proceedings of the Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017. [Google Scholar] [CrossRef]
- Gao, Y.; Jia, L.N.; Wang, B.; Liu, L.H.; Huang, L.M. High Precision Ultrasonic Ranging System for Mobile Robot Navigation. Appl. Mech. Mater. 2012, 249–250, 1139–1143. [Google Scholar] [CrossRef]
- Wu, J.; Zhu, J.; Yang, L.; Shen, M.; Xue, B.; Liu, Z. A highly accurate ultrasonic ranging method based on onset extraction and phase shift detection. Measurement 2014, 47, 433–441. [Google Scholar] [CrossRef]
- Sahoo, A.K.; Udgata, S.K. A Novel ANN-Based Adaptive Ultrasonic Measurement System for Accurate Water Level Monitoring. IEEE Trans. Instrum. Meas. 2019, 69, 3359–3369. [Google Scholar] [CrossRef]
- Yue, H.; Zhang, X.; Shi, Z. Simulation and Implementation of an Ultrasonic Ranging Experiment System. In Proceedings of the IEEE 2nd International Conference on Computer Science and Educational Informatization (CSEI), Xinxiang, China, 17 July 2020. [Google Scholar] [CrossRef]
- Wenhuan, H. Software implementation of a wireless ultrasonic ranging system. In Proceedings of the 12th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Qingdao, China, 16–18 July 2015. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, L. Research of ultrasonic distance measurement system based on DSP. In Proceedings of the International Conference on Computer Science and Service System (CSSS), Nanjing, China, 27–29 June 2011. [Google Scholar] [CrossRef]
- Li, Q.; Huang, Z.; Zhu, Z. Design of High-precision Ultrasonic Ranging System for Mobile Robot. In Proceedings of the 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 18–20 June 2021. [Google Scholar] [CrossRef]
- Tai, H.L.; Zhang, H.; Yang, S. Study on software part of ultrasonic ranging system based on variable emission wavelength. In Proceedings of the 6th International Conference on Computer Science and Network Technology (ICCSNT), Dalian, China, 21–22 October 2017. [Google Scholar] [CrossRef]
- Yuan, S.; Mao, H.; Guo, S.; Zhang, F.; Yao, X. Research on the DSmT Based Model of the Ultrasonic Sensor Detection for Indoor Environment Contour. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016. [Google Scholar] [CrossRef]
- Rozen, O.; Block, S.T.; Mo, X.; Bland, W.; Hurst, P.; Tsai, J.M.; Daneman, M.; Amirtharajah, R.; Horsley, D.A. Monolithic MEMS-CMOS ultrasonic rangefinder based on dual-electrode PMUTs. In Proceedings of the IEEE 29th International Conference on Micro Electro Mechanical Systems, Shanghai, China, 24–28 January 2016; pp. 3336–3339. [Google Scholar] [CrossRef]
- Gluck, T.; Kravchik, M.; Chocron, S.; Elovici, Y.; Shabtai, A. Spoofing Attack on Ultrasonic Distance Sensors Using a Continuous Signal. Sensors 2020, 20, 6157. [Google Scholar] [CrossRef]
- Li, X.; Wu, R.; Sheplak, M.; Li, J. Multifrequency CW-based time-delay estimation for proximity ultrasonic sensors. IEE P-Radar Son. Nav. 2002, 149, 53–59. [Google Scholar] [CrossRef]
- Lagler, D.; Anzinger, S.; Pfann, E.; Fusco, A.; Bretthauer, C.; Huemer, M. A Single Ultrasonic Transducer Fast and Robust Short-Range Distance Measurement Method. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Glasgow, England, 6–9 October 2019. [Google Scholar] [CrossRef]
- Tian, Y.; Sun, X.Y.; Chen, J. Design Principle and Error Analysis of a New Large-Range Ultrasonic Position and Orientation System Based on TDOA. In Proceedings of the International Conference on Advanced Materials and Engineering Materials (ICAMEM), Shenyang, China, 22–24 November 2012. [Google Scholar] [CrossRef]
- Zivkovic, D.S.; Markovic, B.R.; Rakic, D.; Tadic, S. Design considerations and performance of low-cost ultrasonic ranging system. In Proceedings of the 10th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 18 June 2013. [Google Scholar] [CrossRef]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Proc. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Gan, T.H.; Hutchins, D.A.; Green, R.J. A swept frequency multiplication technique for air-coupled ultrasonic NDE. IEEE Trans. Ultrason. Ferr. 2004, 51, 1271–1279. [Google Scholar] [CrossRef]
- Suzuki, K.; Endo, M.; Ishikawa, M.; Nishino, H. Air-coupled ultrasonic vertical reflection method using pulse compression and various window functions: Feasibility study. Jpn. J. Appl. Phys. 2019, 58, SGGB09. [Google Scholar] [CrossRef]
- Baksheeva, I.V.; Khomenko, A.A. Evaluation of the Ultrasonic Medical Scanners Range Resolution in Real Biological Tissue and Ways of Its Improvement. In Proceedings of the Wave Electronics and its Application in Information and Telecommunication Systems (WECONF), St. Petersburg, Russia, 3–7 June 2019. [Google Scholar] [CrossRef]
- Devaud, F.; Haward, G.; Soraghan, J.J. The use of chirp overlapping properties for improved target resolution in an ultrasonic ranging system. In Proceedings of the IEEE Ultrasonics Symposium, Montreal, QC, Canada, 23–27 August 2004. [Google Scholar] [CrossRef]
- Lu, L.; Ye, W.; Tao, J. The Research of Amplitude Threshold Method in Ultrasound- based Indoor Distance-Measurement System. In Proceedings of the 4th International Conference on Electronic Information Technology and Computer Engineering (EITCE), Virtual, Online, China, 6–8 November 2020. [Google Scholar] [CrossRef]
- Chiu, Y.; Wang, C.; Gong, D.; Li, N.; Ma, S.; Jin, Y. A Novel Ultrasonic TOF Ranging System Using AlN Based PMUTs. Micromachines 2021, 12, 284. [Google Scholar] [CrossRef] [PubMed]
- Cai, G.; Zhou, X.; Yi, Y.; Zhou, H.; Li, D.; Zhang, J.; Huang, H.; Mu, X. An Enhanced-Differential PMUT for Ultra-Long Distance Measurement in Air. In Proceedings of the 34th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Virtual, Gainesville, FL, USA, 25–29 January 2021. [Google Scholar] [CrossRef]
- Naba, A.; Khoironi, M.F.; Santjojo, D.D.H. Low Cost but Accurate Ultrasonic Distance Measurement Using Combined Method of Threshold Correlation. In Proceedings of the 14th International Conference on Quality in Research (QiR), Lombok, Indonesia, 10–13 August 2015. [Google Scholar] [CrossRef]
- Li, W.; Chen, Q.; Wu, J. Double threshold ultrasonic distance measurement technique and its application. Rev. Sci. Instrum. 2014, 85, 44905. [Google Scholar] [CrossRef] [PubMed]
- Choe, I.; Lee, K.; Choy, I.; Cho, W. Ultrasonic Distance Measurement Method by Using the Envelope Model of Received Signal Based on System Dynamic Model of Ultrasonic Transducers. J. Electr. Eng. Technol. 2018, 13, 981–988. [Google Scholar] [CrossRef]
- Khyam, M.O.; Ge, S.S.; Li, X.; Pickering, M.R. Highly Accurate Time-of-Flight Measurement Technique Based on Phase-Correlation for Ultrasonic Ranging. IEEE Sens. J. 2017, 17, 434–443. [Google Scholar] [CrossRef]
- Carotenuto, R.; Merenda, M.; Iero, D.; Della Corte, F.G. Simulating Signal Aberration and Ranging Error for Ultrasonic Indoor Positioning. Sensors 2020, 20, 3548. [Google Scholar] [CrossRef]
- Carotenuto, R.; Pezzimenti, F.; Corte, F.G.D.; Iero, D.; Merenda, M. Acoustic Simulation for Performance Evaluation of Ultrasonic Ranging Systems. Electronics 2021, 10, 1298. [Google Scholar] [CrossRef]
- Przybyla, R.; Izyumin, I.; Kline, M.; Boser, B.; Shelton, S. An ultrasonic rangefinder based on an AlN piezoelectric micromachined ultrasound transducer. In Proceedings of the IEEE Sensors Conference, Kona, HI, USA, 1–4 November 2010. [Google Scholar] [CrossRef]
- Carotenuto, R.; Merenda, M.; Iero, D.; Corte, F.G.D. Ranging RFID Tags with Ultrasound. IEEE Sens. J. 2018, 18, 2967–2975. [Google Scholar] [CrossRef]
- Queirós, R.; Corrêa Alegria, F.; Silva Girão, P.; Cruz Serra, A. A multi-frequency method for ultrasonic ranging. Ultrasonics 2015, 63, 86–93. [Google Scholar] [CrossRef]
- Saad, M.M.; Bleakley, C.J.; Dobson, S. Robust High-Accuracy Ultrasonic Range Measurement System. IEEE Trans. Instrum. Meas. 2011, 60, 3334–3341. [Google Scholar] [CrossRef] [Green Version]
- Kredba, J.; Holada, M. Precision ultrasonic range sensor using one piezoelectric transducer with impedance matching and digital signal processing. In Proceedings of the IEEE International Workshop of Electronics, Control, Measurement, Signals and their Application to Mechatronics (ECMSM), Donostia-San Sebastian, Spain, 24–26 May 2017. [Google Scholar] [CrossRef]
- Krenik, M.; Li, X.; Akin, B. Improved TOF Determination Algorithms for Robust Ultrasonic Positioning of Smart Tools. In Proceedings of the 40th Annual Conference of the IEEE-Industrial-Electronics-Society (IECON), Dallas, TX, USA, 29 October–1 November 2014. [Google Scholar] [CrossRef]
- Assous, S.; Hopper, C.; Lovell, M.; Gunn, D.; Jackson, P.; Rees, J. Short pulse multi-frequency phase-based time delay estimation. J. Acoust. Soc. Am. 2010, 127, 309–315. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, K.; Huang, Y. Multiple-frequency ultrasonic distance measurement using direct digital frequency synthesizers. Sens. Actuators A-Phys. 2009, 149, 42–50. [Google Scholar] [CrossRef]
- Kimura, T.; Wadaka, S.; Misu, K.; Nagatsuka, T.; Tajime, T.; Koike, M. A high resolution ultrasonic range measurement method using double frequencies and phase detection. In Proceedings of the 1995 IEEE Ultrasonics Symposium, Seattle, WA, USA, 7–10 November 1995. [Google Scholar] [CrossRef]
- Chongchamsai, M.; Sinchai, S.; Wardkein, P.; Boonjun, S. Distance Measurement Technique Using Phase Difference of Two Reflected Ultrasonic Frequencies. In Proceedings of the 3rd International Conference on Computer and Communication Systems (ICCCS), Nagoya, Japan, 27–30 April 2018. [Google Scholar] [CrossRef]
- Lee, K.; Huang, C.; Huang, S.; Huang, K.; Young, M. A High-Resolution Ultrasonic Distance Measurement System Using Vernier Caliper Phase Meter. IEEE Trans. Instrum. Meas. 2012, 61, 2924–2931. [Google Scholar] [CrossRef]
- Kuratli, C.; Huang, Q. A CMOS Ultrasound Range-Finder Microsystem. In Proceedings of the International Solid-State Circuits Conference, San Francisco, CA, USA, 7–9 February 2000. [Google Scholar] [CrossRef]
- Jiang, S.; Yang, C.; Huang, R.; Fang, C.; Yeh, T. An Innovative Ultrasonic Time-of-Flight Measurement Method Using Peak Time Sequences of Different Frequencies: Part I. IEEE Trans. Instrum. Meas. 2011, 60, 735–744. [Google Scholar] [CrossRef]
- Yang, C.; Jiang, S.; Lin, D.; Lu, F.; Wu, Y.; Yeh, T. An Innovative Ultrasonic Time-of-Flight Measurement Method Using Peak Time Sequences of Different Frequencies—Part II: Implementation. IEEE Trans. Instrum. Meas. 2011, 60, 745–757. [Google Scholar] [CrossRef]
- Chen, X.; Xu, J.; Chen, H.; Ding, H.; Xie, J. High-Accuracy Ultrasonic Rangefinders via pMUTs Arrays Using Multi-Frequency Continuous Waves. J. Microelectromech. Syst. 2019, 28, 634–642. [Google Scholar] [CrossRef]
- Nakahira, K.; Okuma, S.; Kodama, T.; Furuhashi, T. The use of binary coded frequency shift keyed signals for multiple user sonar ranging. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, Taipei, Taiwan, China, 21–23 March 2004. [Google Scholar] [CrossRef]
- Huang, S.S.; Huang, C.F.; Huang, K.N.; Young, M.S. A high accuracy ultrasonic distance measurement system using binary frequency shift-keyed signal and phase detection. Rev. Sci. Instrum. 2002, 73, 3671–3677. [Google Scholar] [CrossRef] [Green Version]
- Nakahira, K.; Kodama, T.; Furuhashi, T.; Okuma, S. A self-adapting sonar ranging system based on digital polarity correlators. Meas. Sci. Technol. 2004, 15, 347–352. [Google Scholar] [CrossRef]
- Zhenjing, Y.; Li, H.; Yanan, L. Improvement of Measurement Range via Chaotic Binary Frequency Shift Keying Excitation Sequences for Multichannel Ultrasonic Ranging System. Int. J. Control Autom. 2016, 9, 189–200. [Google Scholar] [CrossRef]
- Hua, H.; Wang, Y.; Yan, D. A low-cost dynamic range-finding device based on amplitude-modulated continuous ultrasonic wave. IEEE Trans. Instrum. Meas. 2002, 51, 362–367. [Google Scholar] [CrossRef]
- Sumathi, P.; Janakiraman, P.A. SDFT-Based Ultrasonic Range Finder Using AM Continuous Wave and Online Parameter Estimation. IEEE Trans. Instrum. Meas. 2010, 59, 1994–2004. [Google Scholar] [CrossRef]
- Sasaki, K.; Tsuritani, H.; Tsukamoto, Y.; Iwatsubo, S. Air-coupled ultrasonic time-of-flight measurement system using amplitude-modulated and phase inverted driving signal for accurate distance measurements. IEICE Electron. Expr. 2009, 6, 1516–1521. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.P.; Wang, J.S.; Huang, K.N.; Ho, C.T.; Huang, J.D.; Young, M.S. Envelope pulsed ultrasonic distance measurement system based upon amplitude modulation and phase modulation. Rev. Sci. Instrum. 2007, 78, 65103. [Google Scholar] [CrossRef]
- Huang, J.; Lee, C.; Yeh, C.; Wu, W.; Lin, C. High-Precision Ultrasonic Ranging System Platform Based on Peak-Detected Self-Interference Technique. IEEE Trans. Instrum. Meas. 2011, 60, 3775–3780. [Google Scholar] [CrossRef]
- Carotenuto, R. A range estimation system using coded ultrasound. Sens. Actuators A-Phys. 2016, 238, 104–111. [Google Scholar] [CrossRef]
- Dou, Z.; Karnaushenko, D.; Schmidt, O.G.; Karnaushenko, D. A High Spatiotemporal Resolution Ultrasonic Ranging Technique with Multiplexing Capability. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Alvarez, F.J.; Aguilera, T.; Fernandez, J.A.; Moreno, J.A.; Gordillo, A. Analysis of the performance of an Ultrasonic Local Positioning System based on the emission of Kasami codes. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010. [Google Scholar] [CrossRef]
- Pérez, M.C.; Ureña, J.; Hernández, A.; Jiménez, A.; Ruíz, D.; álvarez, F.J.; De Marziani, C. Performance Comparison of Different Codes in an Ultrasonic Positioning System using DS-CDMA. In Proceedings of the 6th IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009. [Google Scholar] [CrossRef]
- Meng, Q.; Yao, F.; Wu, Y. Review of Crosstalk Elimination Methods for Ultrasonic Range Systems in Mobile Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006. [Google Scholar] [CrossRef]
- Ureña, J.; Mazo, M.; García, J.J.; Hernández, Á.; Bueno, E. Correlation detector based on a FPGA for ultrasonic sensors. Microprocess. Microsyst. 1999, 23, 25–33. [Google Scholar] [CrossRef] [Green Version]
- Hernandez, A.; Urena, J.; Garcia, J.J.; Mazo, M.; Hernanz, D.; Derutin, J.P.; Serot, J. Ultrasonic ranging sensor using simultaneous emissions from different transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 1660–1669. [Google Scholar] [CrossRef]
- Hernández, Á.; Ureña, J.; Hernanz, D.; García, J.J.; Mazo, M.; Dérutin, J.; Serot, J.; Palazuelos, S.E. Real-time implementation of an efficient Golay correlator (EGC) applied to ultrasonic sensorial systems. Microprocess. Microsyst. 2003, 27, 397–406. [Google Scholar] [CrossRef]
- Yamanaka, K.; Hirata, S.; Hachiya, H. Evaluation of correlation property of linear-frequency-modulated signals coded by maximum-length sequences. Jpn. J. Appl. Phys. 2016, 55, 7. [Google Scholar] [CrossRef]
- Lufinka, O. Multiple-point ultrasonic distance measurement and communication with simulations. In Proceedings of the 24th Telecommunications Forum (TELFOR), Belgrade, Serbia, 22–23 November 2016. [Google Scholar] [CrossRef]
- Meng, Q.; Lan, S.; Yao, Z.; Li, G. Real-Time Noncrosstalk Sonar System by Short Optimized Pulse-Position Modulation Sequences. IEEE Trans. Instrum. Meas. 2009, 58, 3442–3449. [Google Scholar] [CrossRef]
- Yao, Z.; Meng, Q.; Li, G.; Lin, P. Non-Crosstalk Real-Time Ultrasonic Range System with Optimized Chaotic Pulse Position-Width Modulation Excitation. In Proceedings of the IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008. [Google Scholar] [CrossRef]
- Shin, S.; Kim, M.; Choi, S.B. Improving Efficiency of Ultrasonic Distance Sensors using Pulse Interval Modulation. In Proceedings of the 15th IEEE Sensors Conference, Orlando, FL, USA, 30 October–2 November 2016. [Google Scholar] [CrossRef]
- Fortuna, L.; Frasca, M.; Rizzo, A. Chaotic pulse position modulation to improve the efficiency of sonar sensors. IEEE Trans. Instrum. Meas. 2003, 52, 1809–1814. [Google Scholar] [CrossRef]
- Shin, S.; Kim, M.; Choi, S.B. Ultrasonic Distance Measurement Method with Crosstalk Rejection at High Measurement Rate. IEEE Trans. Instrum. Meas. 2019, 68, 972–979. [Google Scholar] [CrossRef]
- Bischoff, O.; Wang, X.; Heidmann, N.; Laur, R.; Paul, S. Implementation of an ultrasonic distance measuring system with kalman filtering in wireless sensor networks for transport logistics. In Proceedings of the 24th Eurosensors International Conference, Linz, Austria, 5–8 September 2010. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Qing-Hao, M.; Jia-Lin, H.; Pu, L.; Ming, Z. Proportional-Integral-Differential-Based Automatic Gain Control Circuit for Ultrasonic Ranging Systems. In Proceedings of the 5th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Hong Kong, China, 16–17 January 2013. [Google Scholar] [CrossRef]
- Singh, N.A.; Borschbach, M. Effect of external factors on accuracy of distance measurement using ultrasonic sensors. In Proceedings of the 1st IEEE International Conference on Signals and Systems (ICSigSys), Bali, Indonesia, 16–18 May 2017. [Google Scholar] [CrossRef]
- Yu, S.Q.; Feng, T.; Me, X.X. A High Precision Ultrasonic Ranging Method under Misalignmen ToF Transducer Pairs. J. Xiamen Univ. Nat. Sci. 2006, 45, 513–517. [Google Scholar]
- Nicolau, V.; Aiordachioaie, D.; Andrei, M. Fuzzy system for sound speed estimation in outdoor ultrasonic distance measurements. In Proceedings of the 4th International Symposium on Computational Intelligence and Intelligent Informatics, Luxor, Egypt, 21–25 October 2009. [Google Scholar] [CrossRef]
- Van Schaik, W.; Grooten, M.; Wernaart, T.; van der Geld, C. High Accuracy Acoustic Relative Humidity Measurement inDuct Flow with Air. Sensors 2010, 10, 7421–7433. [Google Scholar] [CrossRef]
- Löfqvist, T.; Sokas, K.; Delsing, J. Speed of sound measurements in gas-mixtures at varying composition using an ultrasonic gas flow meter with silicon based transducers. In Proceedings of the 11th IMEKO TC9 Conference on Flow Measurement, Groningen, The Netherlands, 12 May 2003. [Google Scholar]
- Wen, Z.Z.; Li, F.N.; Xia, Z.B. High-Precision Ultrasonic Ranging System Design and Research. In Proceedings of the International Academic Conference on Numbers, Intelligence, Manufacturing Technology and Machinery Automation (MAMT), Wuhan, China, 24–25 December 2011. [Google Scholar] [CrossRef]
- Khoenkaw, P.; Pramokchon, P. A software based method for improving accuracy of ultrasonic range finder module. In Proceedings of the 2nd Joint International Conference on Digital Arts, Media and Technology (ICDAMT), Chiang Mai, Thailand, 1–4 March 2017. [Google Scholar] [CrossRef]
- Shen, M.; Wang, Y.; Jiang, Y.; Ji, H.; Wang, B.; Huang, Z. A New Positioning Method Based on Multiple Ultrasonic Sensors for Autonomous Mobile Robot. Sensors 2020, 20, 17. [Google Scholar] [CrossRef] [Green Version]
- Majchrzak, J.; Michalski, M.; Wiczynski, G. Distance Estimation with a Long-Range Ultrasonic Sensor System. IEEE Sens. J. 2009, 9, 767–773. [Google Scholar] [CrossRef]
- Chaparro, L.X.; Contreras, C.R.; Meneses, J.E.; Martins Costa, M.F.P.C. Operating principle of a high resolution ultrasonic ranging system based in a phase processing. In Proceedings of the 8th Ibero American Optics Meeting/11th Latin American Meeting on Optics, Lasers, and Applications, Porto, Portugal, 22–26 July 2013. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bulk Piezoelectric | CMUTs | PMUTs | |
|---|---|---|---|
| Fabrication methods | Mechanical machining, e.g., dicing, lapping and casting | Wafer bonding and micromachining | Micromachining and wafer transfer diaphragm formation |
| Matching layer | Required | No matching layer | No matching layer |
| * and bandwidth | Low | High | Low |
| CMOS compatible and flip-chip integration | No | Yes | Yes |
| DC bias requirement | No | Yes | No |
| General Size | Centimeter to millimeter level size | Millimeter level size of transducer arrays Hundred microns level size of a single CMUT | Millimeter level size of transducer arrays Hundred microns level size of a single PMUT |
| Reference | Range | Accuracy | Transducer Type |
|---|---|---|---|
| [63] | 1300 mm | 1.3 mm | PMUT with 215 kHz |
| [110] | 500 mm | 0.63 mm | PMUT with 97 kHz and 96 kHz |
| [111] | 1000 mm | 4 mm | PMUT with 77.34 kHz |
| [109] | 5000 mm | 4 mm | Conventional bulk transducers with 35 kHz |
| [112] | 100 mm | 0.5 mm | Conventional bulk transducers with 40 kHz |
| Reference | Range | Accuracy | Signal Frequency |
|---|---|---|---|
| [127] | 30 mm~100 mm | 1.5 mm | 39.85 kHz and 40.6 kHz |
| [128] | 50 mm~200 mm | 0.1362 mm | 40 kHz and 40.82 kHz |
| [129] | 10 mm~110 mm | 2.5 mm | 94.21 kHz and 95.59 kHz |
| Range | Accuracy | Signal Frequency | |
|---|---|---|---|
| [23] | 1500 mm | 0.05 mm | 40.0 kHz, 39.9 kHz and 38.0 kHz |
| [132] | <100 mm | 0.0711 mm | 497.0 kHz, 496.8 kHz and 487 kHz |
| 100 mm~300 mm | 1.8208 mm | 492 kHz, 491.8 kHz and 490 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, Z.; Lu, Y.; Qiu, Z. Review of Ultrasonic Ranging Methods and Their Current Challenges. Micromachines 2022, 13, 520. https://doi.org/10.3390/mi13040520
Qiu Z, Lu Y, Qiu Z. Review of Ultrasonic Ranging Methods and Their Current Challenges. Micromachines. 2022; 13(4):520. https://doi.org/10.3390/mi13040520
Chicago/Turabian StyleQiu, Zurong, Yaohuan Lu, and Zhen Qiu. 2022. "Review of Ultrasonic Ranging Methods and Their Current Challenges" Micromachines 13, no. 4: 520. https://doi.org/10.3390/mi13040520