
Hysteresis Characteristics and MPI Compensation of Two-Dimensional Piezoelectric Positioning Stage

Abstract
:1. Introduction
2. Hysteresis of Piezoelectrics
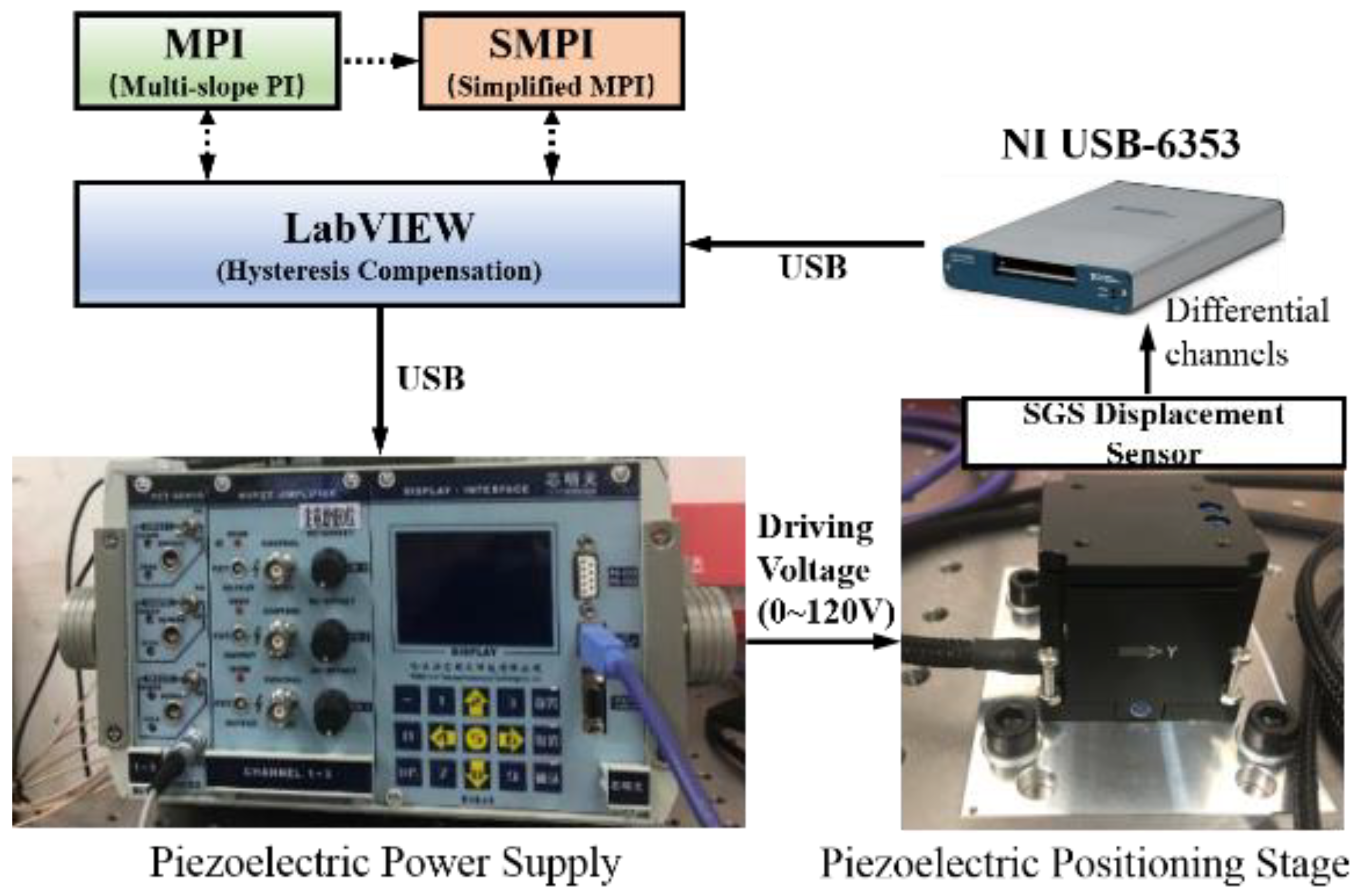
2.1. Experimental System
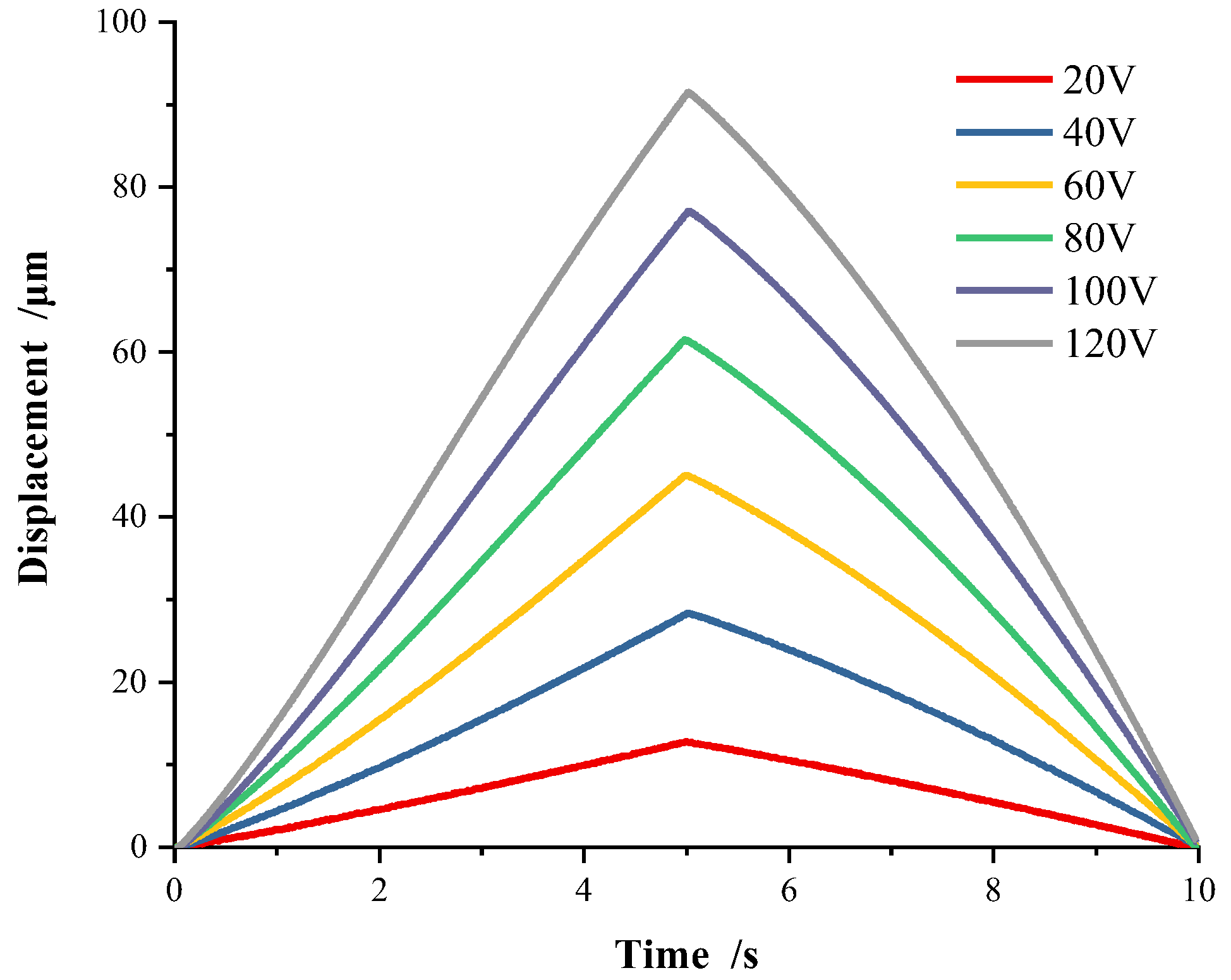
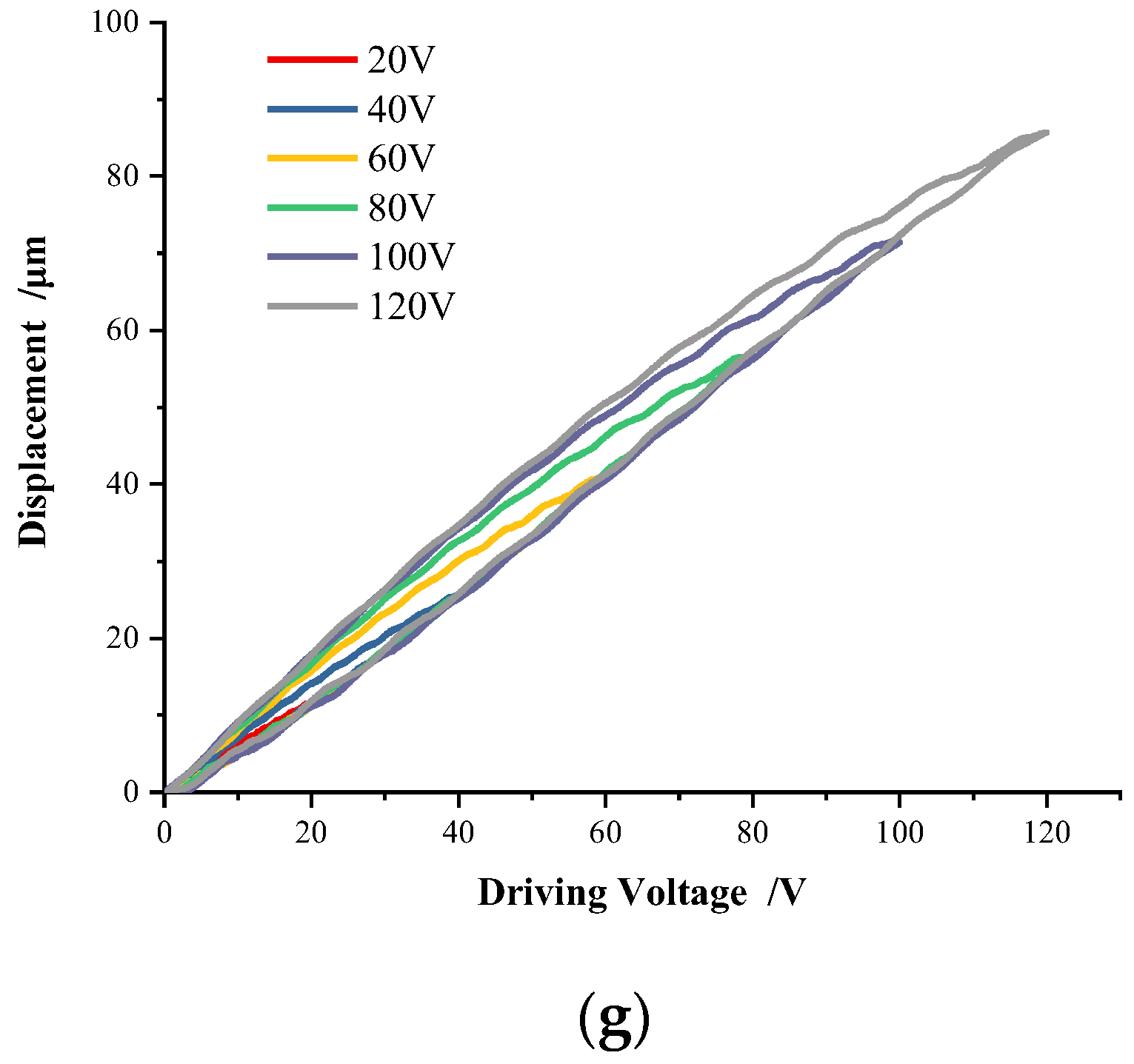
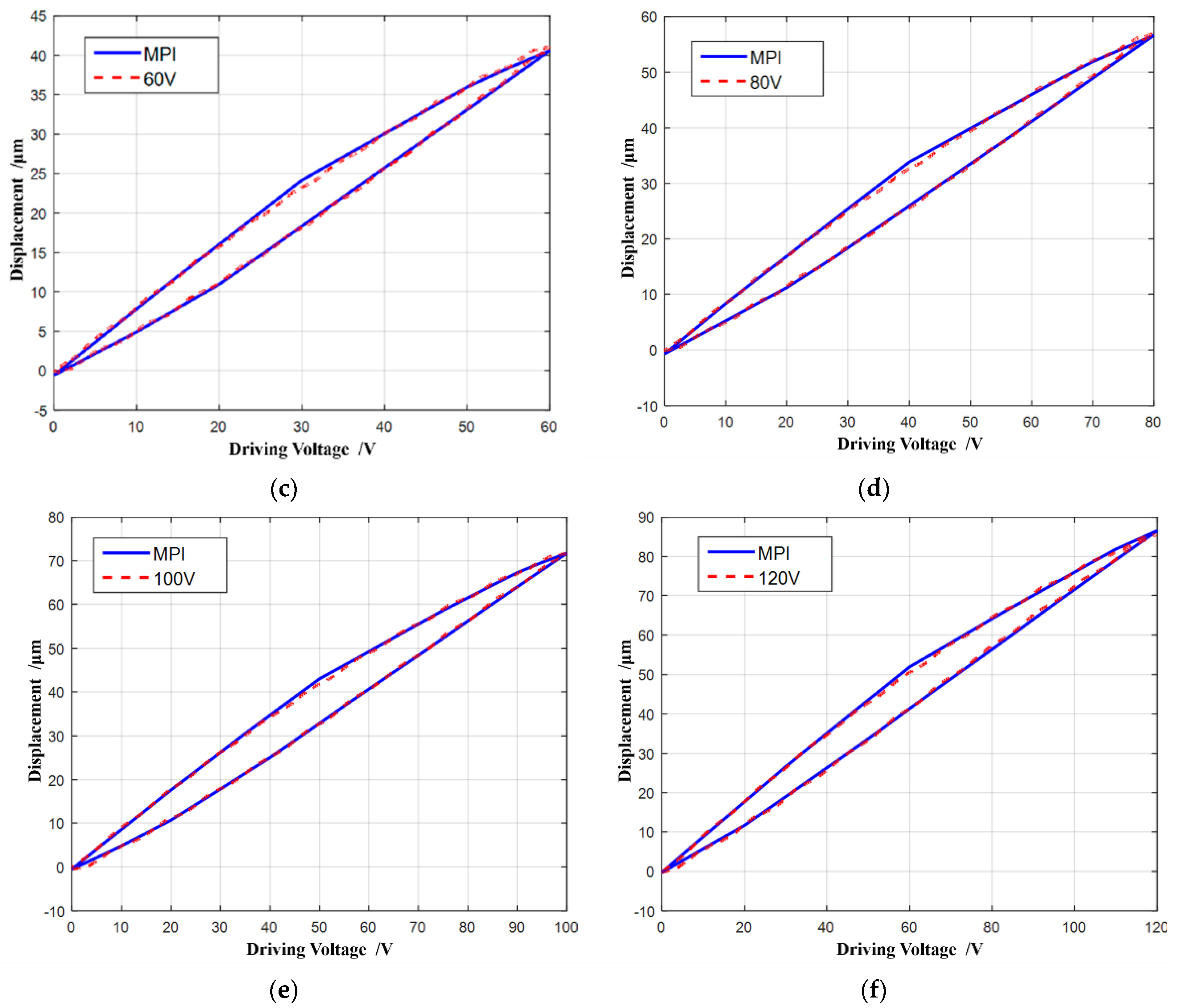
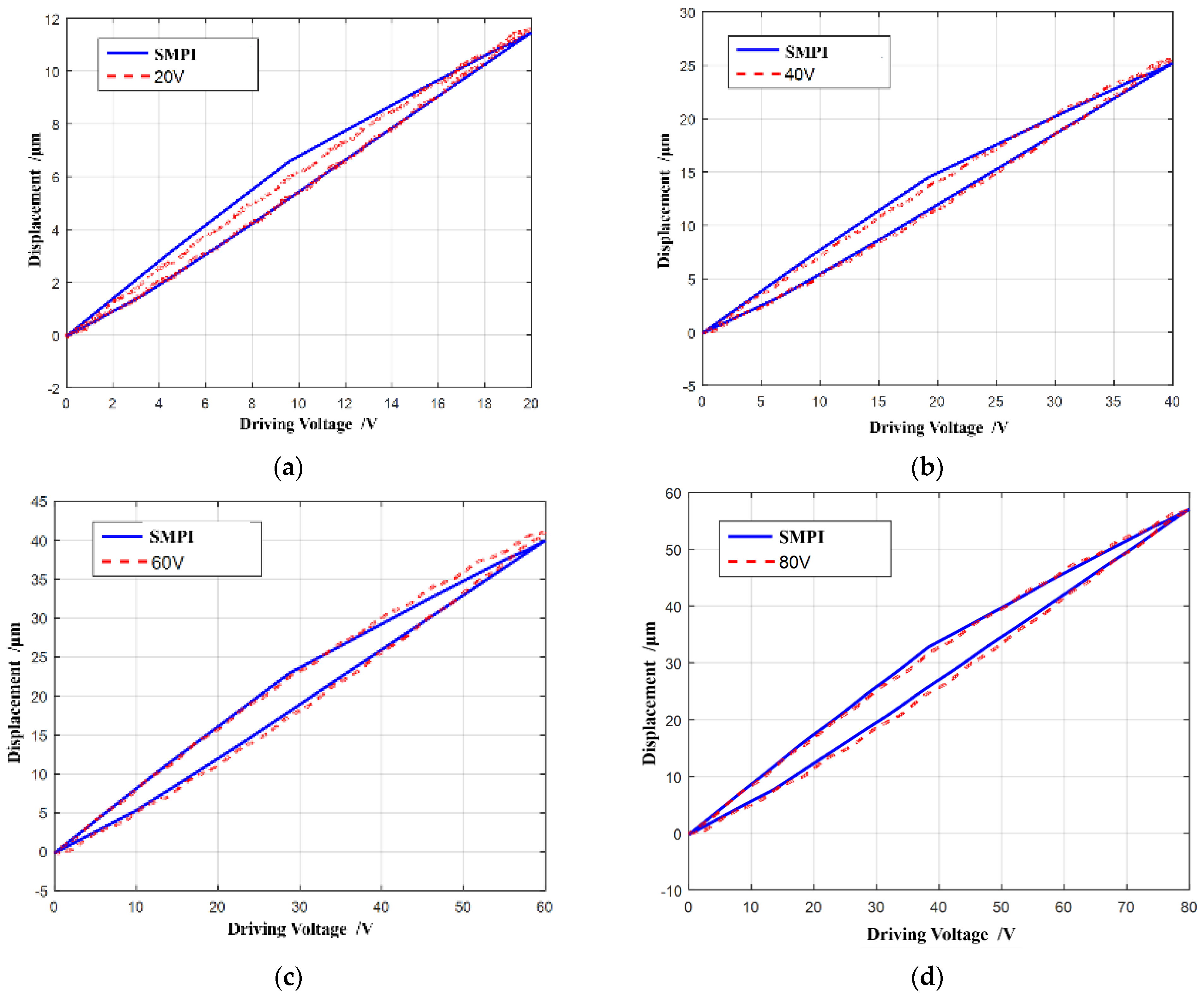
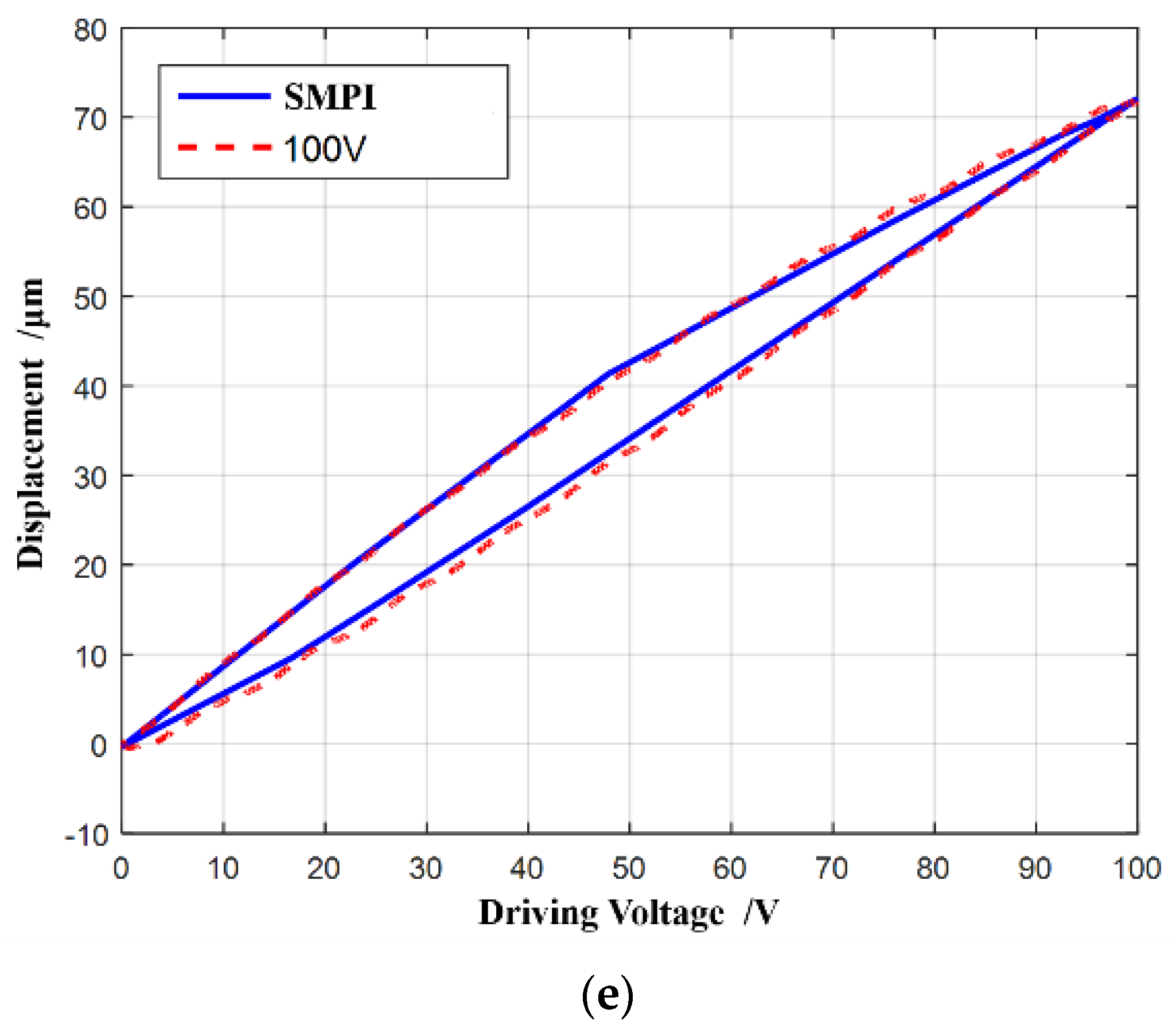
2.2. Voltage Amplitude on Piezoelectric Hysteresis
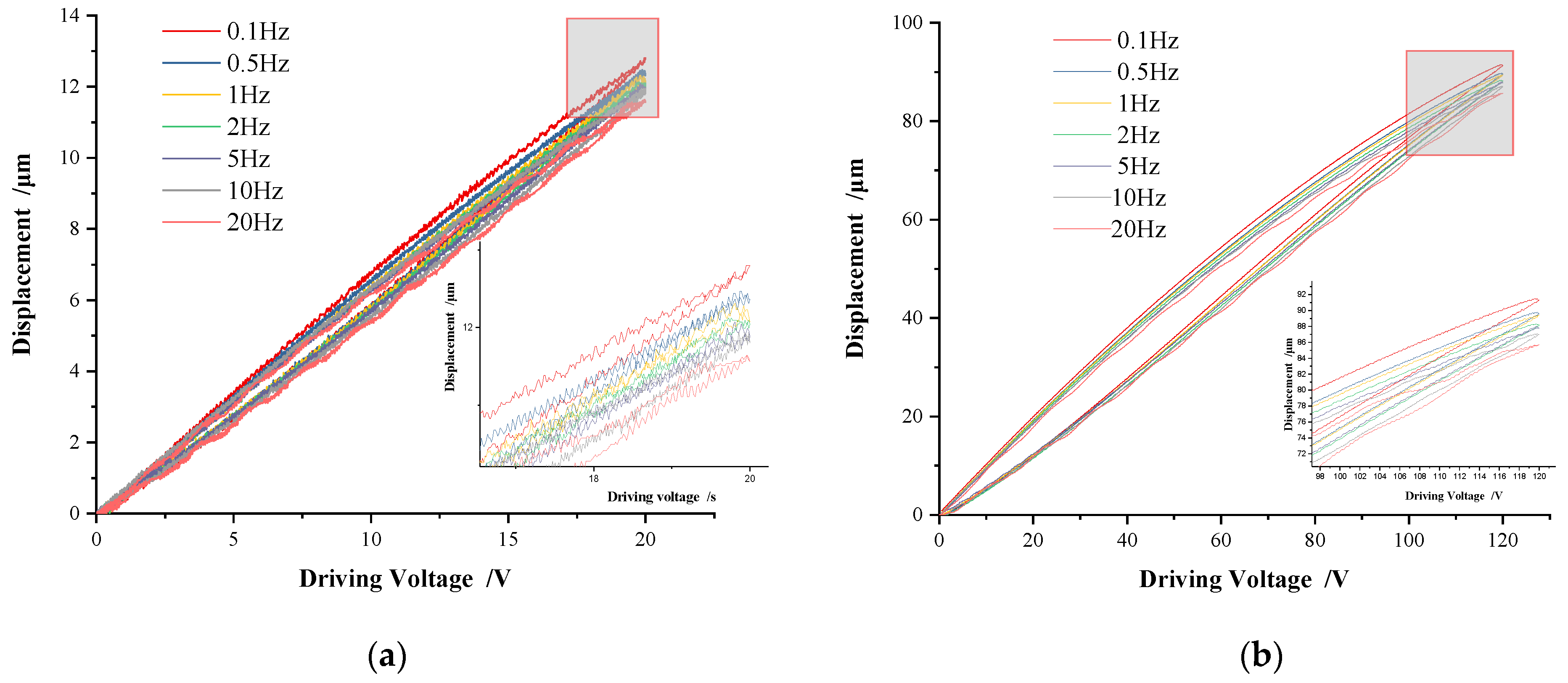
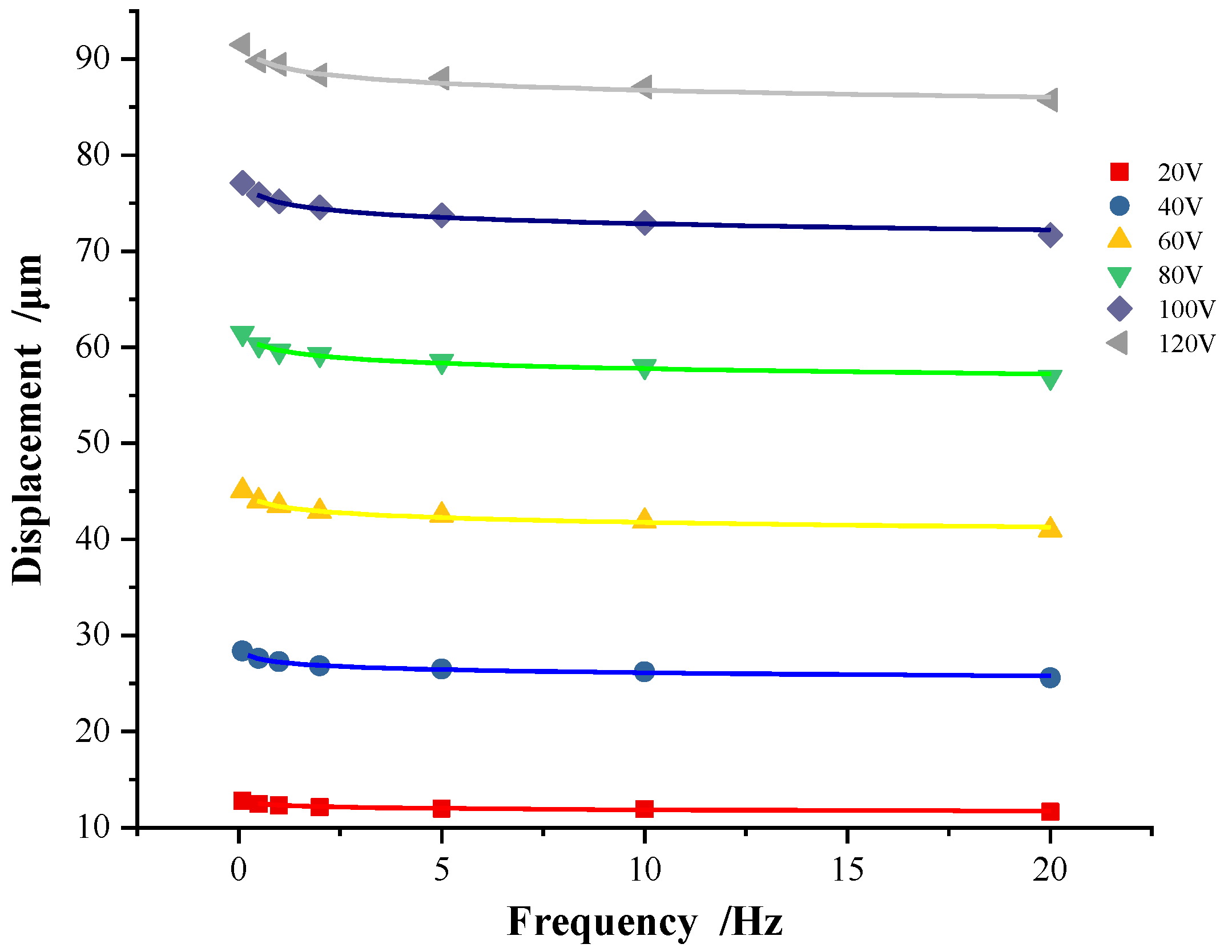
2.3. Voltage Frequency on Piezoelectric Hysteresis
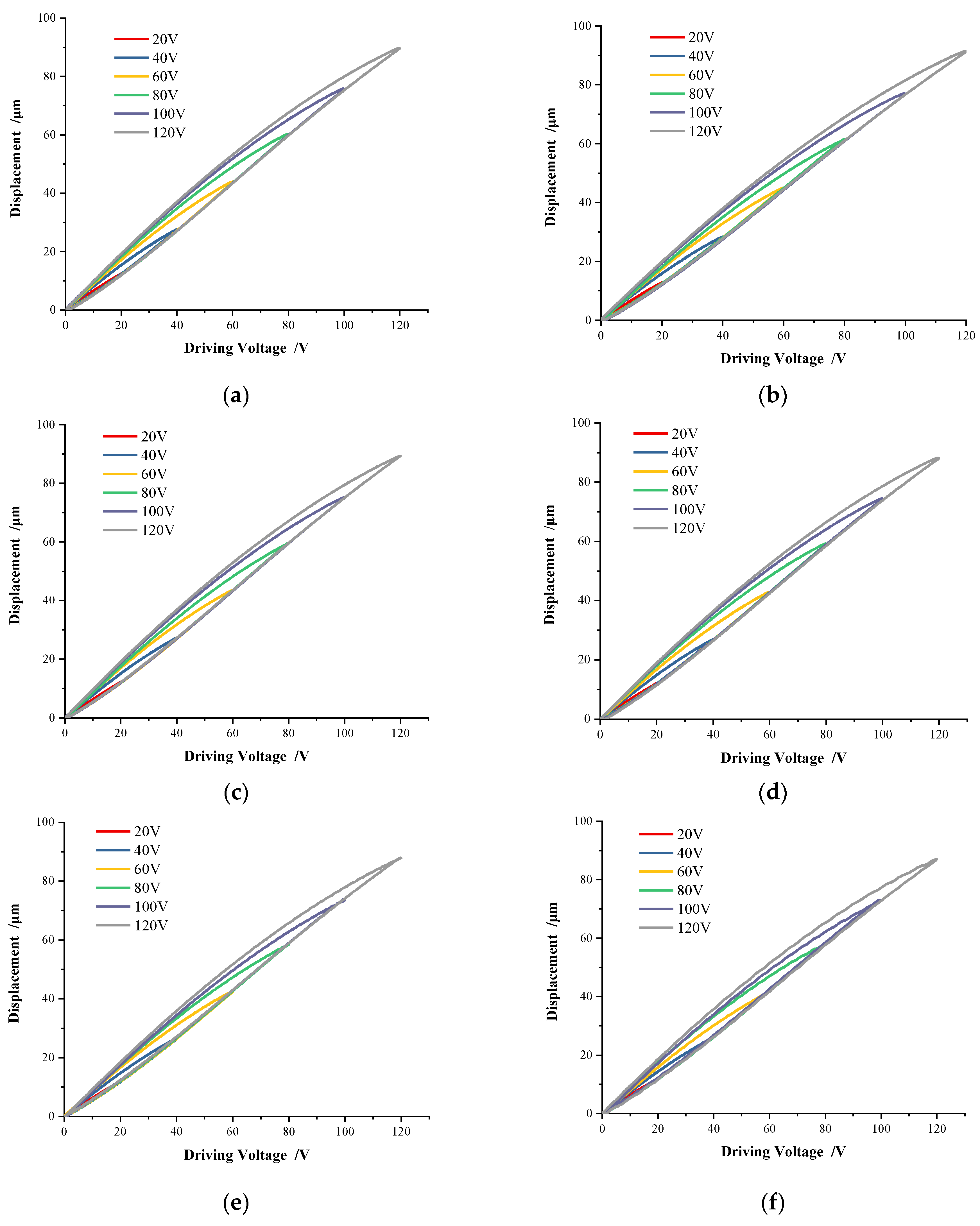
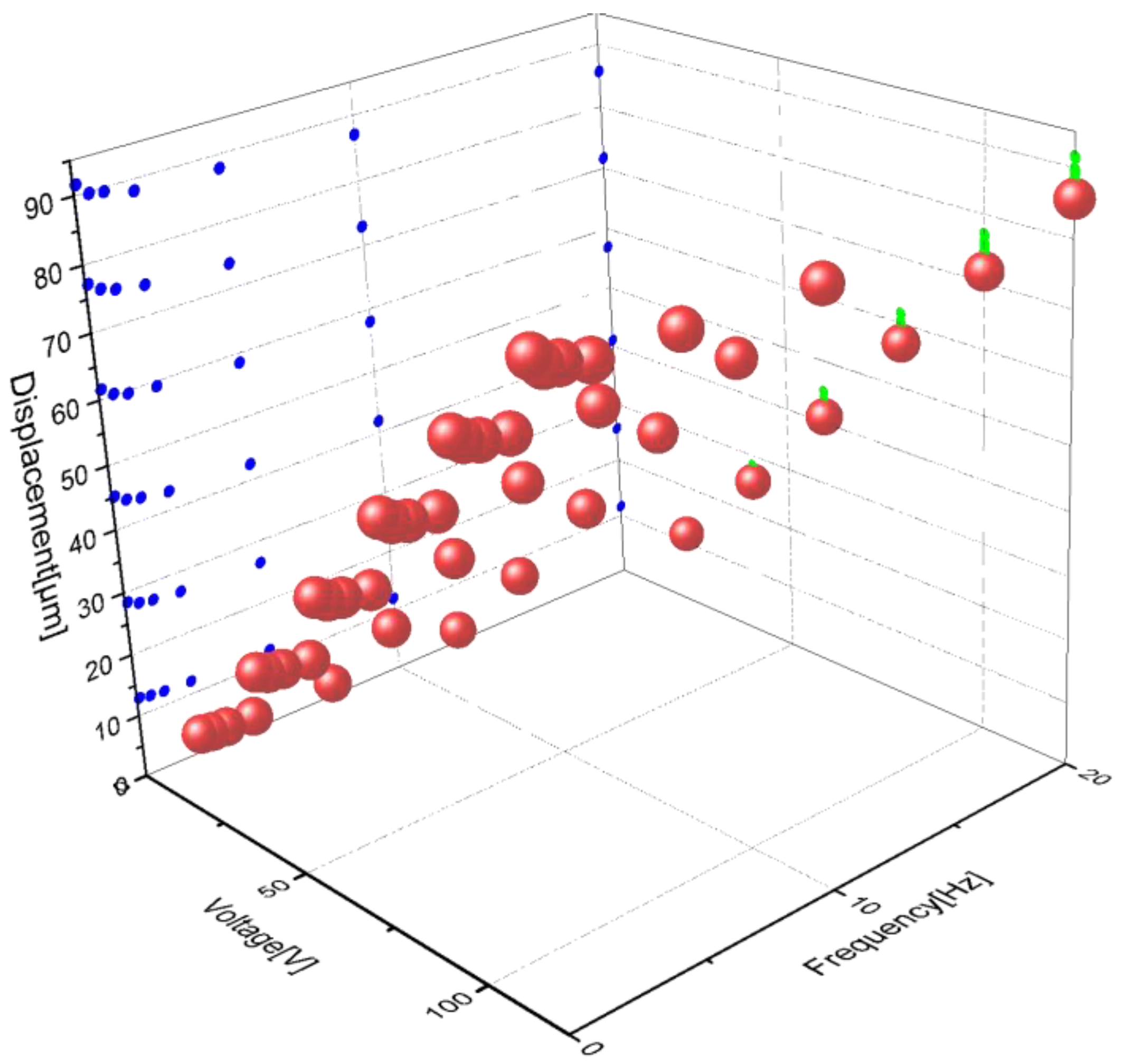
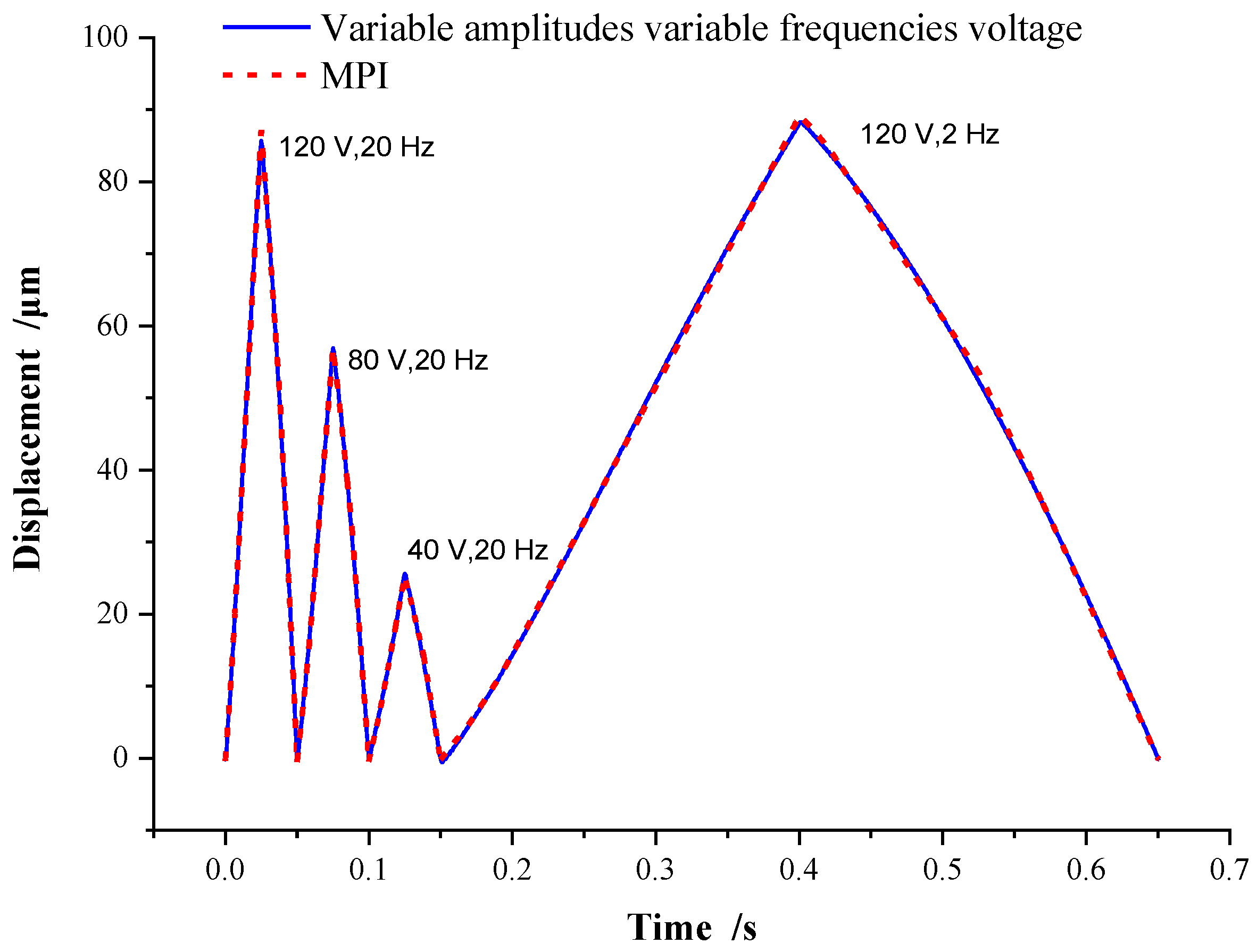
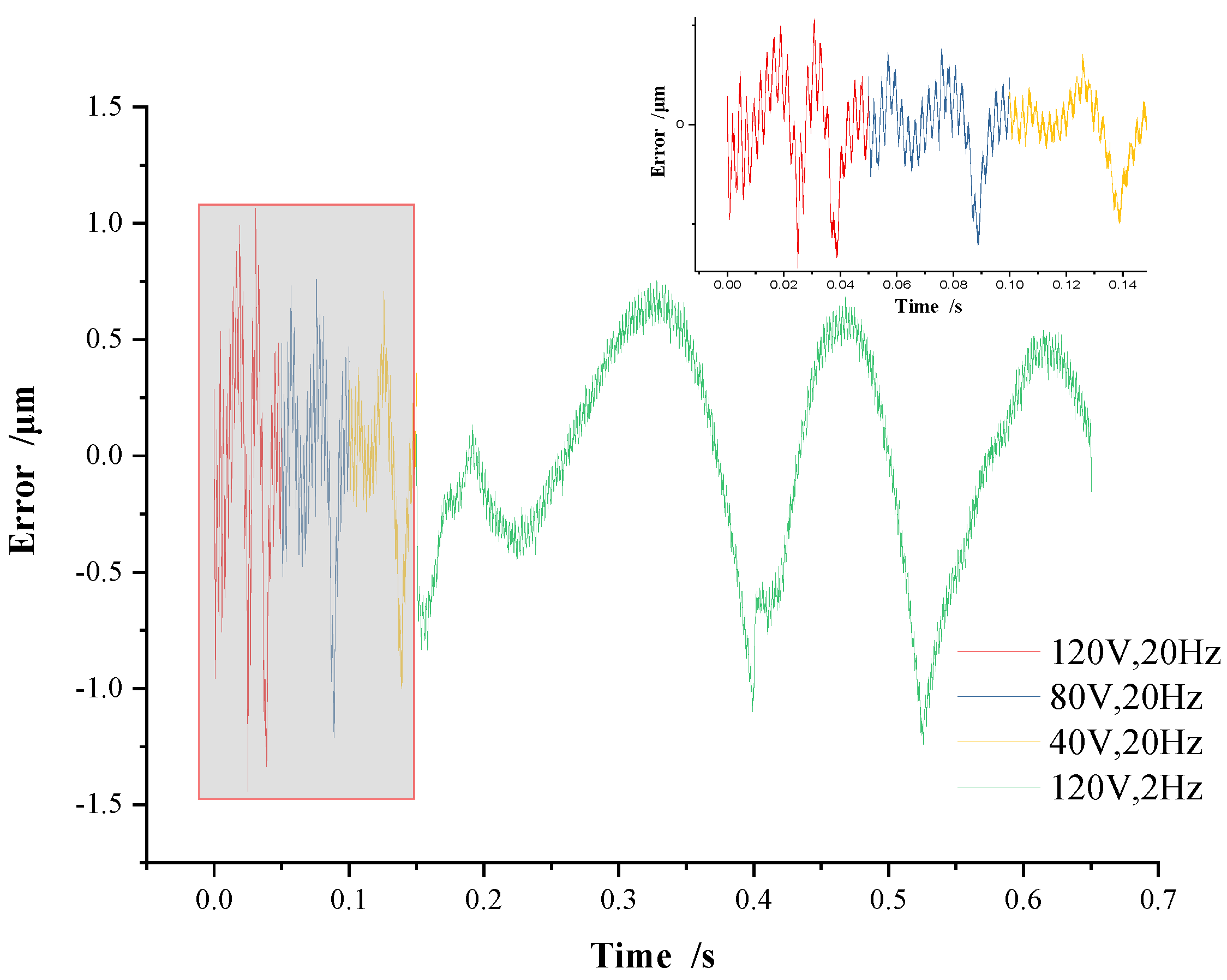
2.4. Voltage on Piezoelectric Hysteresis
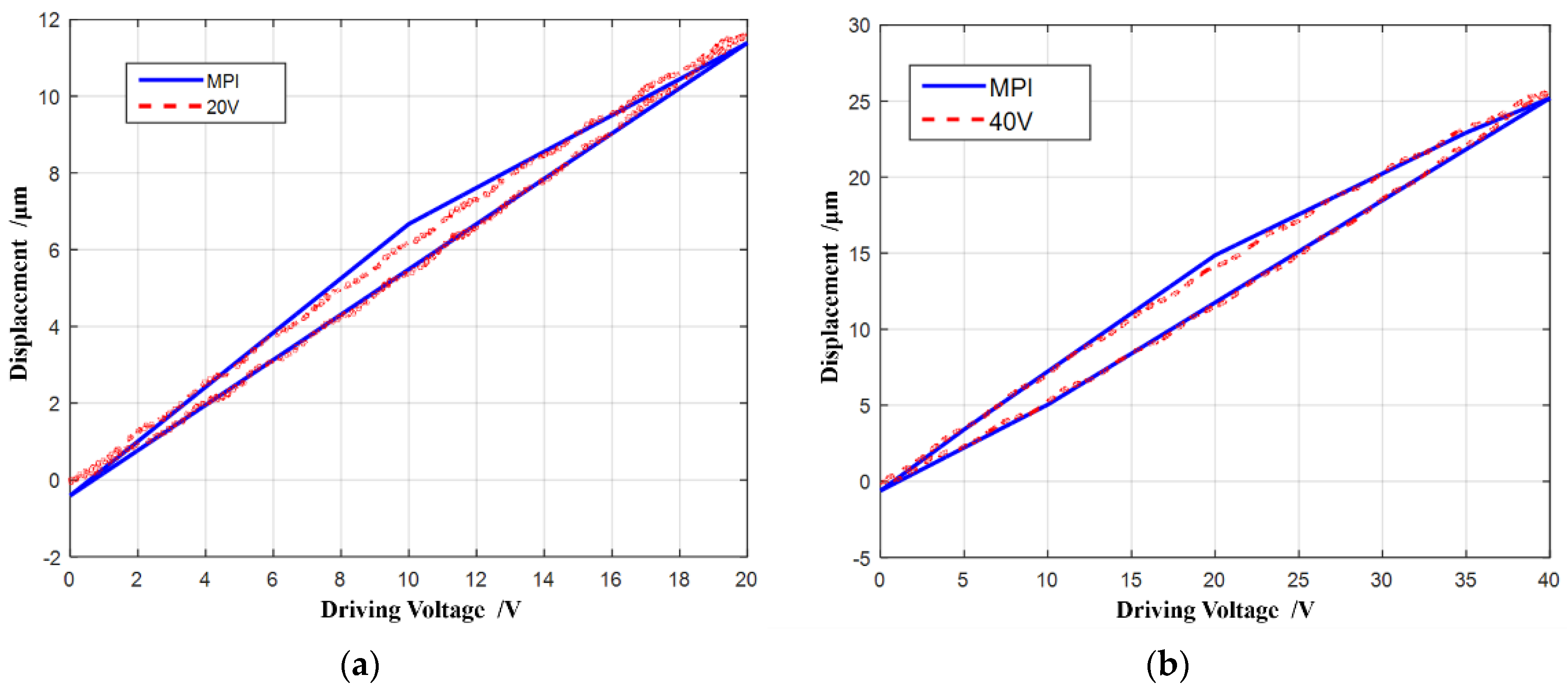
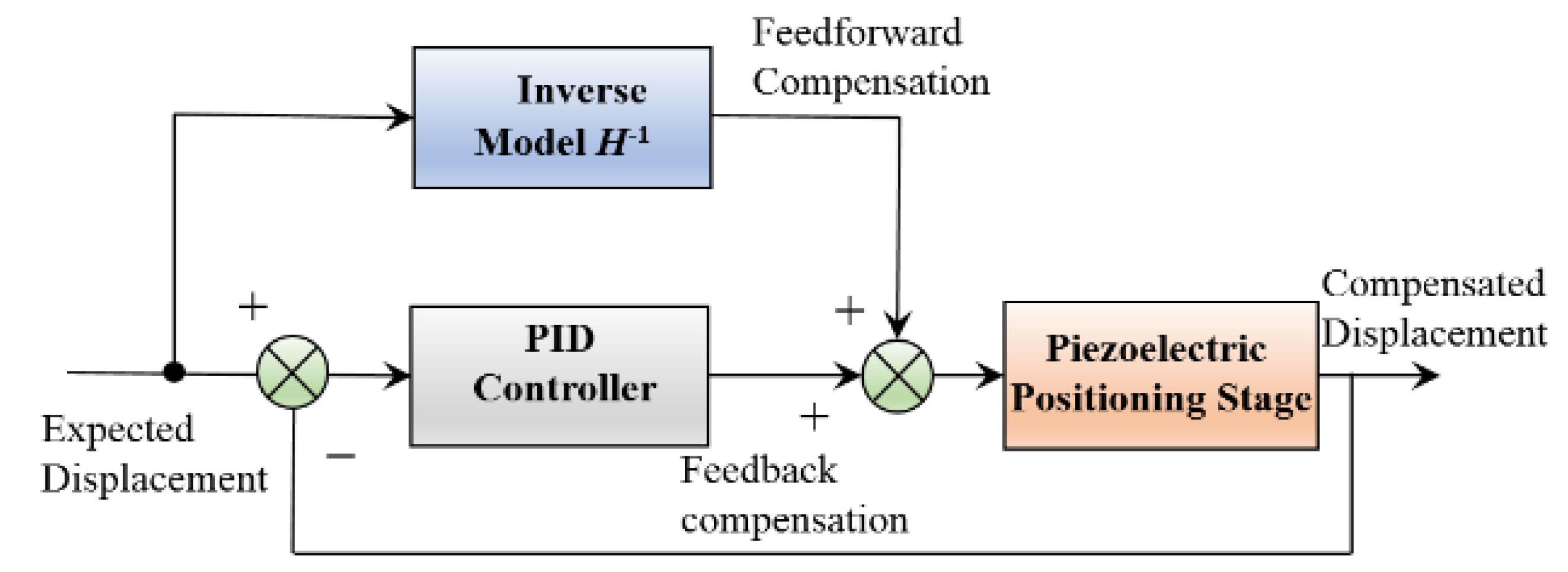
3. MPI Hysteresis Compensation
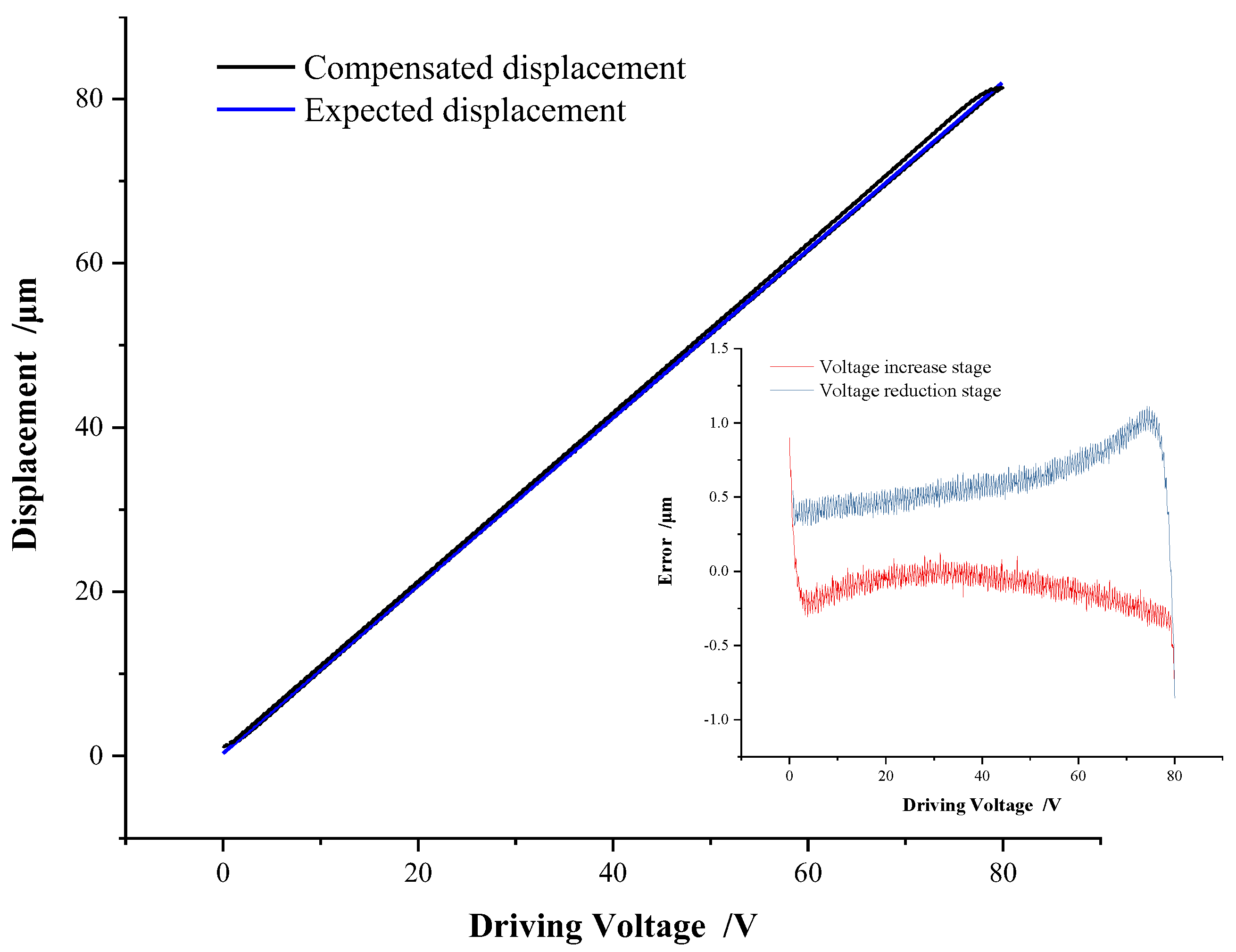
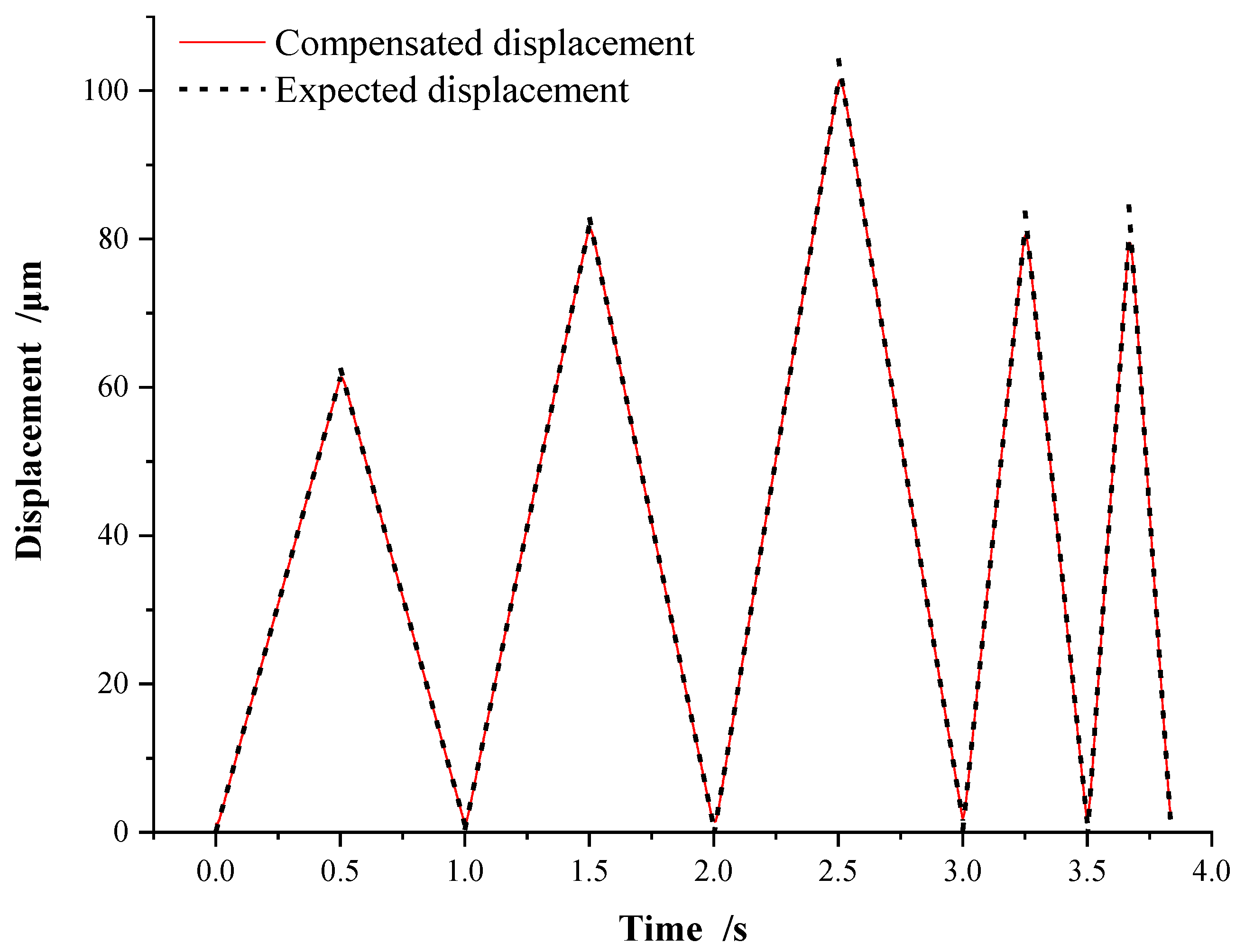
4. Experiments and Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sabarianand, D.V.; Karthikeyan, P.; Muthuramalingam, T. A review on control strategies for compensation of hysteresis and creep on piezoelectric actuators based micro systems. Mech. Syst. Signal Process. 2020, 140, 106634. [Google Scholar] [CrossRef]
- Gan, J.; Zhang, X. A review of nonlinear hysteresis modeling and control of piezoelectric actuators. AIP Adv. 2019, 9, 040702. [Google Scholar] [CrossRef] [Green Version]
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent trends in piezoelectric actuators for precision motion and their applications: A review. Smart Mater. Struct. 2021, 30, 013002. [Google Scholar] [CrossRef]
- Li, L.; Li, C.-X.; Gu, G.; Zhu, L.-M. Modified repetitive control based cross-coupling compensation approach for the piezoelectric tube scanner of atomic force microscopes. IEEE/ASME Trans. Mechatron. 2019, 24, 666–676. [Google Scholar] [CrossRef]
- Otieno, L.O.; Nguyen, T.T.; Park, S.J.; Lee, Y.J.; Alunda, B.O. Feedforward compensation for hysteresis and dynamic behaviors of a high-speed atomic force microscope scanner. J. Korean Phys. Soc. 2022, in press. [CrossRef]
- Hassani, V.; Tjahjowidodo, T.; Do, T.N. A survey on hysteresis modeling, identification and control. Mech. Syst. Signal Process. 2014, 49, 209–233. [Google Scholar] [CrossRef]
- Su, H.; Cardona, D.C.; Shang, W.; Camilo, A.; Cole, G.A.; Rucker, D.C.; Webster, R.J.; Fischer, G.S. A MRI-guided concentric tube continuum robot with piezoelectric actuation: A feasibility study. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1939–1945. [Google Scholar] [CrossRef]
- Delibas, B.; Koc, B. A Method to realize low velocity movability and eliminate friction induced noise in piezoelectric ultrasonic motors. IEEE/ASME Trans. Mechatron. 2020, 25, 2677–2687. [Google Scholar] [CrossRef]
- Park, R.S.; Riedel, J.E.; Ermakov, A.I.; Roa, J.; Castillo-Rogez, J.; Davies, A.G.; McEwen, A.S.; Watkins, M.M. Advanced Pointing Imaging Camera (APIC) for planetary science and mission opportunities. Planet. Space Sci. 2020, 194, 105095. [Google Scholar] [CrossRef]
- Prabhu, P.; Rao, M. Investigations on piezo actuated micro XY stage for vibration-assisted micro milling. J. Micromech. Microeng. 2021, 31, 065007. [Google Scholar] [CrossRef]
- Sohrabi, M.A.; Muliana, A.H. Nonlinear and time dependent behaviors of piezoelectric materials and structures. Int. J. Mech. Sci. 2015, 94–95, 1–9. [Google Scholar] [CrossRef]
- Habineza, D.; Rakotondrabe, M.; Le Gorrec, Y. Bouc–Wen modeling and feedforward control of multivariable hysteresis in piezoelectric systems: Application to a 3-DoF piezotube scanner. IEEE Trans. Control Syst. Technol. 2015, 23, 1797–1806. [Google Scholar] [CrossRef]
- Fang, J.; Wang, J.; Li, C.; Zhong, W.; Long, Z. A compound control based on the piezo-actuated stage with Bouc–Wen model. Micromachines 2019, 10, 861. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ming, M.; Liang, W.; Feng, Z.; Ling, J.; Al Mamun, A.; Xiao, X. PID-type sliding mode-based adaptive motion control of a 2-DOF piezoelectric ultrasonic motor driven stage. Mechatronics 2021, 76, 102543. [Google Scholar] [CrossRef]
- Mansour, S.Z.; Seethaler, R. Displacement and force self-sensing technique for piezoelectric actuators using a nonlinear constitutive model. IEEE Trans. Ind. Electron. 2019, 66, 8610–8617. [Google Scholar] [CrossRef]
- Zhang, M.; Damjanovic, D. A quasi-Rayleigh model for modeling hysteresis of piezoelectric actuators. Smart Mater. Struct. 2020, 29, 075012. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, Z.; Zhang, Y.; Li, D. Rate-dependent modeling of piezoelectric actuators for nano manipulation based on fractional Hammerstein model. Micromachines 2022, 13, 42. [Google Scholar] [CrossRef]
- Kamlah, M.; Böhle, U. Finite element analysis of piezoceramic components taking into account ferroelectric hysteresis behavior. Int. J. Solids Struct. 2001, 38, 605–633. [Google Scholar] [CrossRef]
- Delibas, B.; Arockiarajan, A.; Seemann, W. Rate dependent properties of perovskite type tetragonal piezoelectric materials using micromechanical model. Int. J. Solids Struct. 2006, 43, 697–712. [Google Scholar] [CrossRef] [Green Version]
- Pruvost, S.; Hajjaji, A.; Lebrun, L.; Guyomar, D.; Boughaleb, Y. Domain switching and energy harvesting capabilities in ferroelectric materials. J. Phys. Chem. C 2010, 114, 20629–20635. [Google Scholar] [CrossRef]
- Sofla, M.S.; Sadigh, M.J.; Zareinejad, M. Precise dynamic modeling of pneumatic muscle actuators with modified Bouw–Wen hysteresis model. Proc. Inst. Mech. Eng. Part E J. Process. Mech. Eng. 2021, 235, 1449–1457. [Google Scholar] [CrossRef]
- Li, Z.; Shan, J.; Gabbert, U. Inverse compensation of hysteresis using Krasnoselskii–Pokrovskii model. IEEE/ASME Trans. Mechatron. 2018, 23, 966–971. [Google Scholar] [CrossRef]
- Luo, Y.; Qu, Y.; Zhang, Y.; Xu, M.; Xie, S.; Zhang, X. Hysteretic modeling and simulation of a bilateral piezoelectric stack actuator based on Preisach model. Int. J. Appl. Electromagn. Mech. 2019, 59, 271–280. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Rakotondrabe, M.; Aljanaideh, O. Further results on hysteresis compensation of smart micropositioning systems with the inverse Prandtl–Ishlinskii compensator. IEEE Trans. Control Syst. Technol. 2016, 24, 428–439. [Google Scholar] [CrossRef]
- Zhou, C.; Feng, C.; Aye, Y.; Ang, W. A digitized representation of the modified Prandtl–Ishlinskii hysteresis model for modeling and compensating piezoelectric actuator hysteresis. Micromachines 2021, 12, 942. [Google Scholar] [CrossRef] [PubMed]
- Long, Z.; Wang, R.; Fang, J.; Dai, X.; Zhili, L. Hysteresis compensation of the Prandtl-Ishlinskii model for piezoelectric actuators using modified particle swarm optimization with chaotic map. Rev. Sci. Instrum. 2017, 88, 075003. [Google Scholar] [CrossRef]
- Ko, Y.-R.; Hwang, Y.; Chae, M.; Kim, T.-H. Direct identification of generalized Prandtl–Ishlinskii model inversion for asymmetric hysteresis compensation. ISA Trans. 2017, 70, 209–218. [Google Scholar] [CrossRef]
- Gu, G.; Zhu, L.-M.; Su, C.-Y. Modeling and compensation of asymmetric hysteresis nonlinearity for piezoceramic actuators with a modified Prandtl–Ishlinskii model. IEEE Trans. Ind. Electron. 2013, 61, 1583–1595. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Rakheja, S.; Su, C.-Y. An analytical generalized Prandtl–Ishlinskii model inversion for hysteresis compensation in micropositioning control. IEEE/ASME Trans. Mechatron. 2011, 16, 734–744. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.-Y.; Chen, X. Modeling and inverse adaptive control of asymmetric hysteresis systems with applications to magnetostrictive actuator. Control Eng. Pract. 2014, 33, 148–160. [Google Scholar] [CrossRef]
- Xu, M.; Zhang, J.-Q.; Rong, C.; Ni, J. Multislope PI modeling and feedforward compensation for piezoelectric beam. Math. Probl. Eng. 2020, 2020, 6404971. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Amplitude (V) | a | b |
|---|---|---|
| 20 | 12.306 | −0.017 |
| 40 | 27.235 | −0.018 |
| 60 | 43.448 | −0.017 |
| 80 | 59.669 | −0.014 |
| 100 | 75.08 | −0.013 |
| 120 | 89.189 | −0.012 |
| Driving Voltage (20 Hz Triangle-Wave) | Maximum Absolute Error (μm) | Mean Absolute Error (μm) | Mean Square Error (μm) |
|---|---|---|---|
| 20 V | 0.4215 | 0.1184 | 0.1451 |
| 40 V | 1.0007 | 0.2306 | 0.3164 |
| 60 V | 0.9785 | 0.2554 | 0.3217 |
| 80 V | 1.2104 | 0.2753 | 0.3611 |
| 100 V | 1.0687 | 0.2941 | 0.3724 |
| 120 V | 1.4441 | 0.4002 | 0.5053 |
| Driving Voltage | 20 V | 40 V | 60 V | 80 V | 100 V | 120 V |
|---|---|---|---|---|---|---|
| R2 | 0.9960 | 0.9983 | 0.9993 | 0.9996 | 0.9997 | 0.9996 |
| Driving Voltage (20 Hz Triangle-Wave) | Maximum Absolute Error (μm) | Mean Absolute Error (μm) | Mean Square Error (μm) |
|---|---|---|---|
| 20 V | 0.7348 | 0.1936 | 0.2692 |
| 40 V | 1.0278 | 0.3300 | 0.3986 |
| 60 V | 1.7215 | 0.5507 | 0.6678 |
| 80 V | 1.5595 | 0.6115 | 0.7322 |
| 100 V | 1.7403 | 0.7126 | 0.8491 |
| Driving Voltage | 20 V | 40 V | 60 V | 80 V | 100 V |
|---|---|---|---|---|---|
| R2 | 0.9939 | 0.9973 | 0.9970 | 0.9982 | 0.9985 |
| Group | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Expected Displacement (μm) | 60 | 80 | 100 | 80 | 80 |
| Frequency (Hz) | 1 | 1 | 1 | 2 | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Zhang, J.; Xu, M.; Chen, G. Hysteresis Characteristics and MPI Compensation of Two-Dimensional Piezoelectric Positioning Stage. Micromachines 2022, 13, 321. https://doi.org/10.3390/mi13020321
Wang W, Zhang J, Xu M, Chen G. Hysteresis Characteristics and MPI Compensation of Two-Dimensional Piezoelectric Positioning Stage. Micromachines. 2022; 13(2):321. https://doi.org/10.3390/mi13020321
Chicago/Turabian StyleWang, Wanqiang, Jiaqi Zhang, Ming Xu, and Guojin Chen. 2022. "Hysteresis Characteristics and MPI Compensation of Two-Dimensional Piezoelectric Positioning Stage" Micromachines 13, no. 2: 321. https://doi.org/10.3390/mi13020321