
Study on the Manipulation Strategy of Metallic Microstructures Based on Electrochemical-Assisted Method

Abstract
:1. Introduction
2. Experimental and Theoretical Research
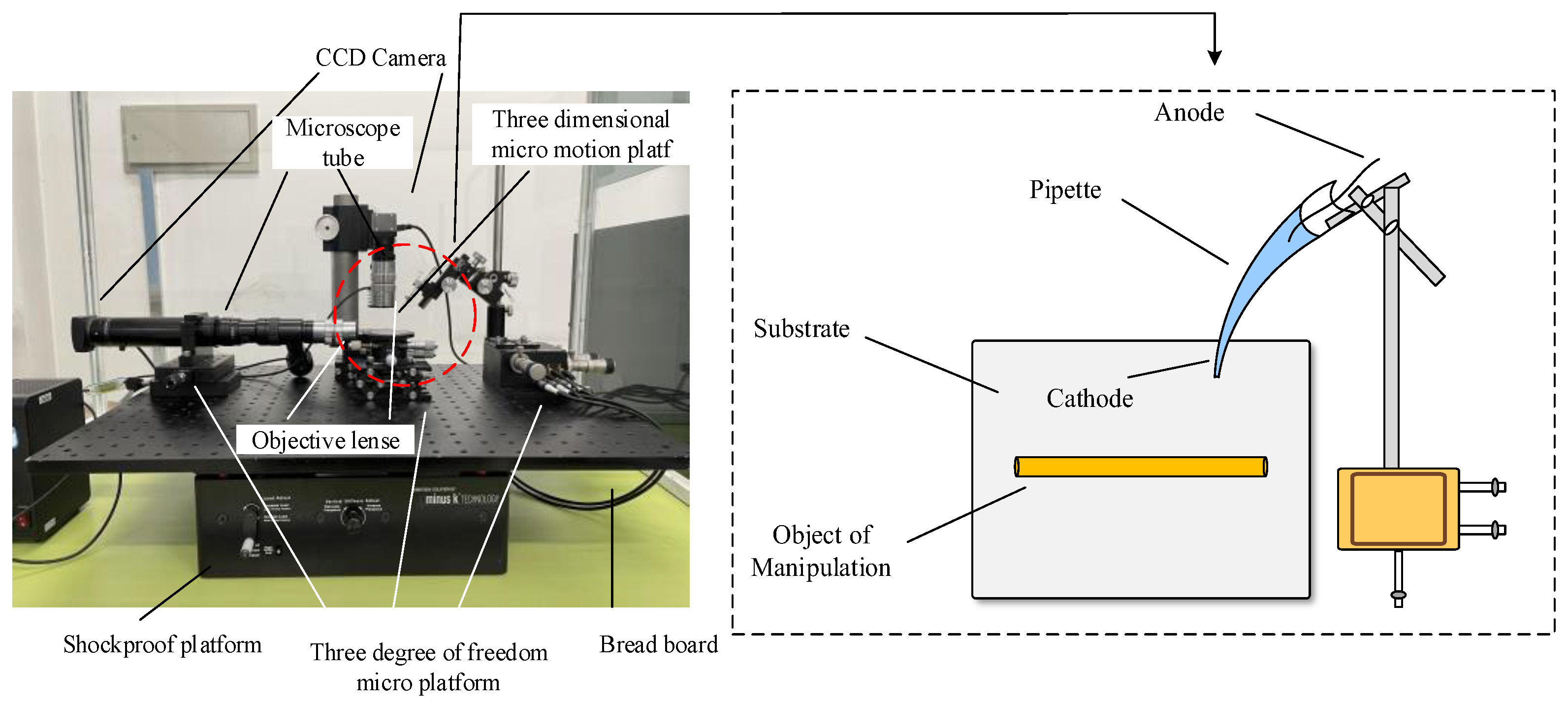
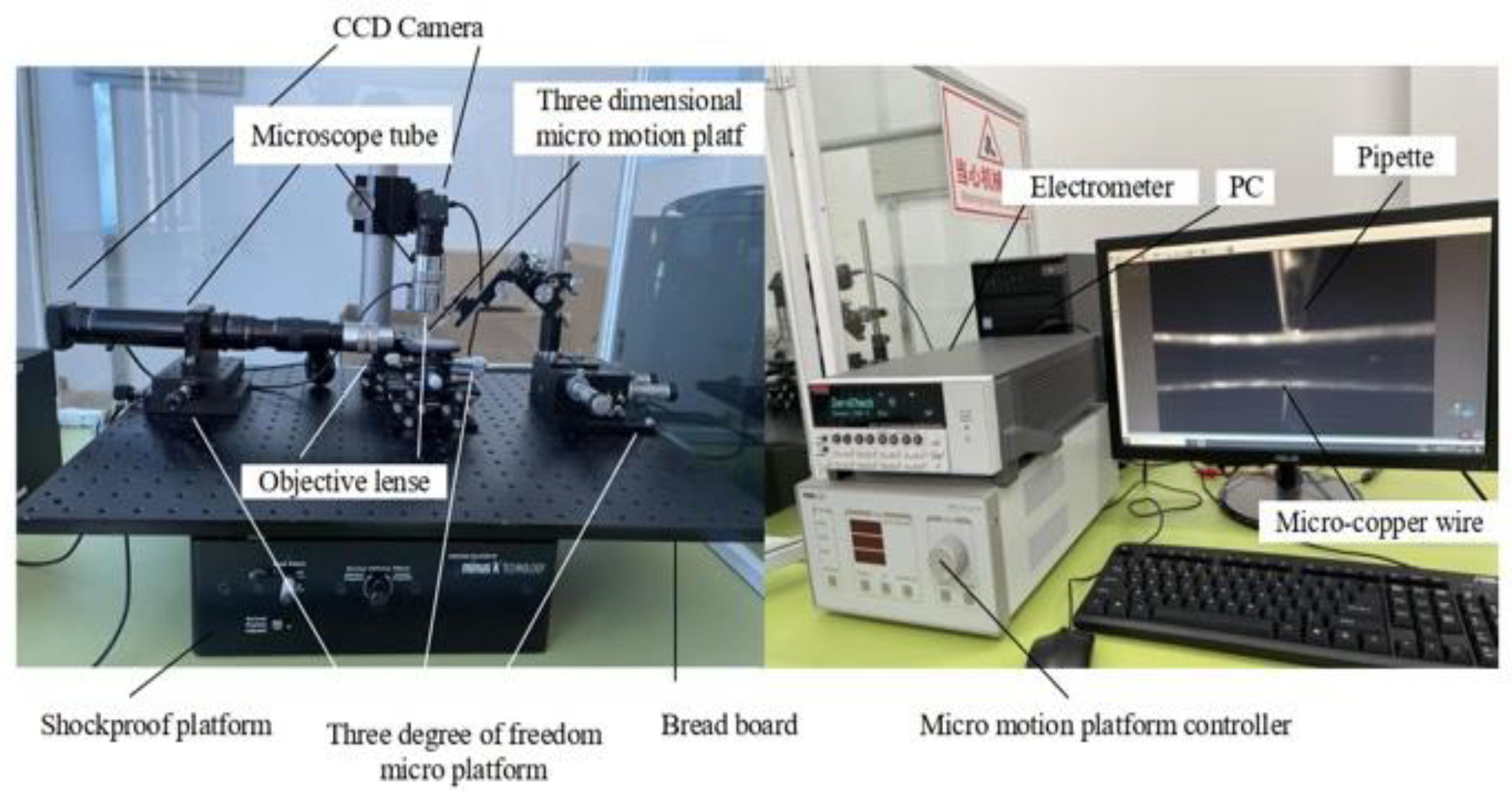
2.1. Experimental Conditions
2.2. Experimental Conditions and Method
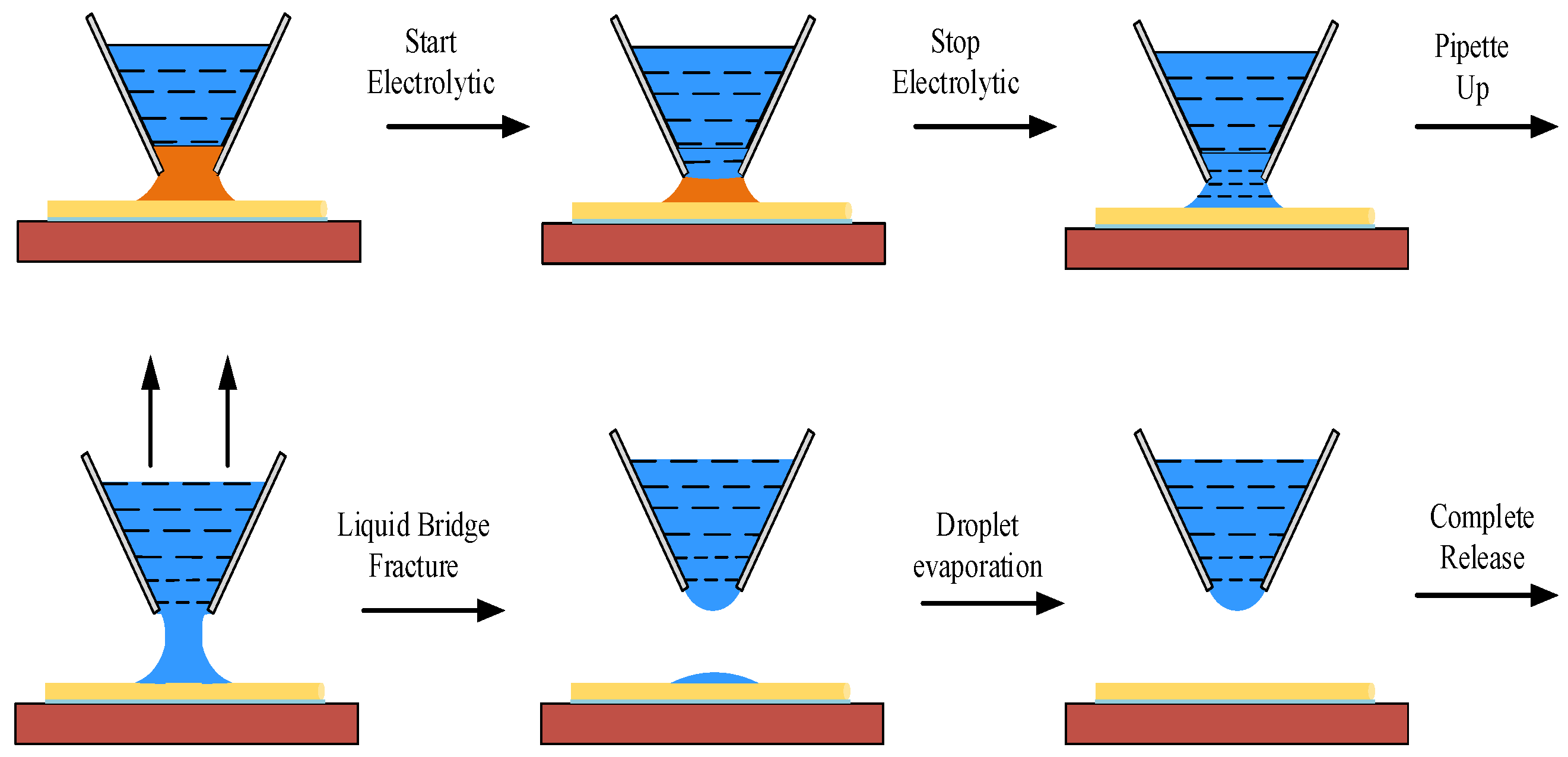
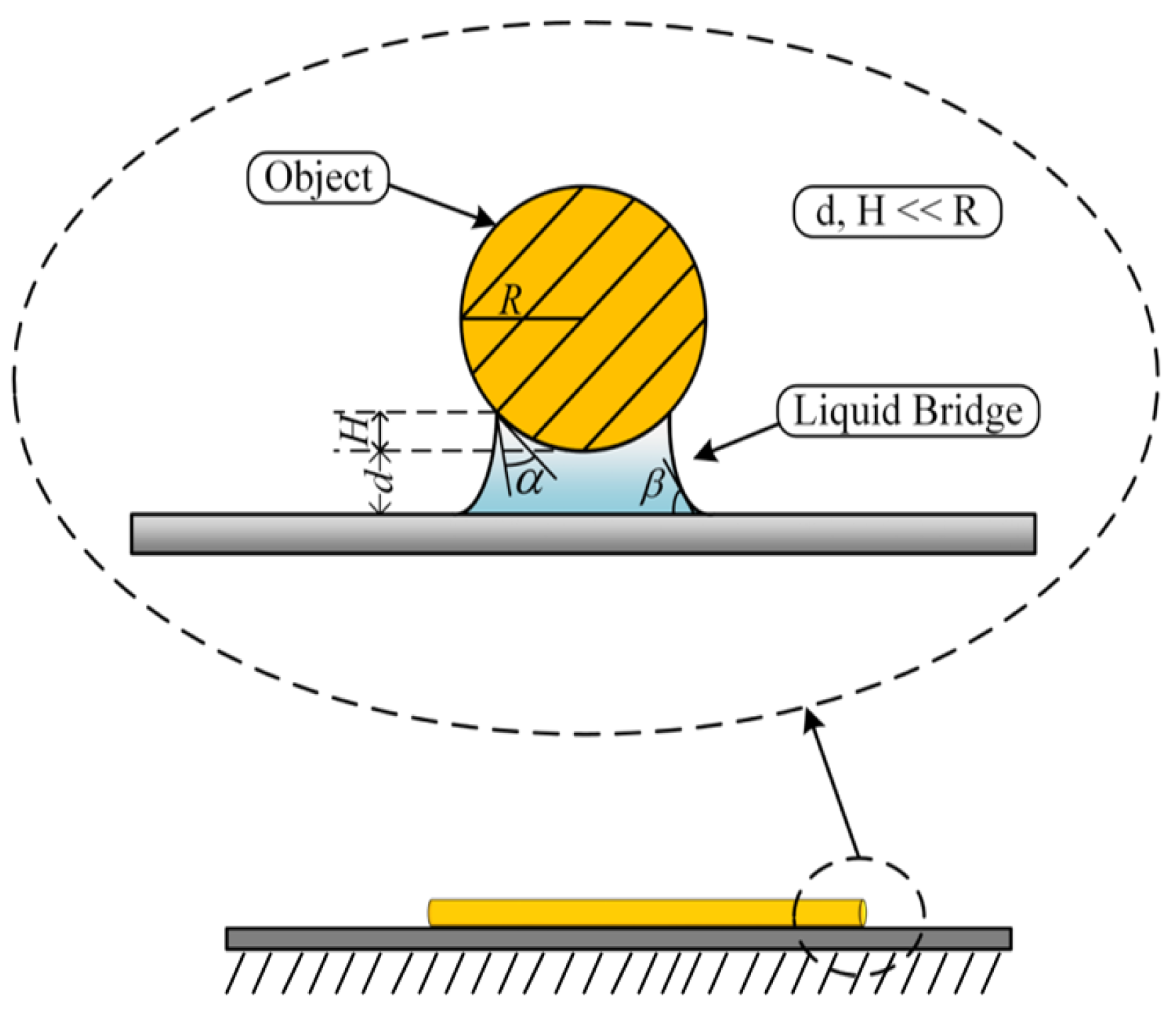
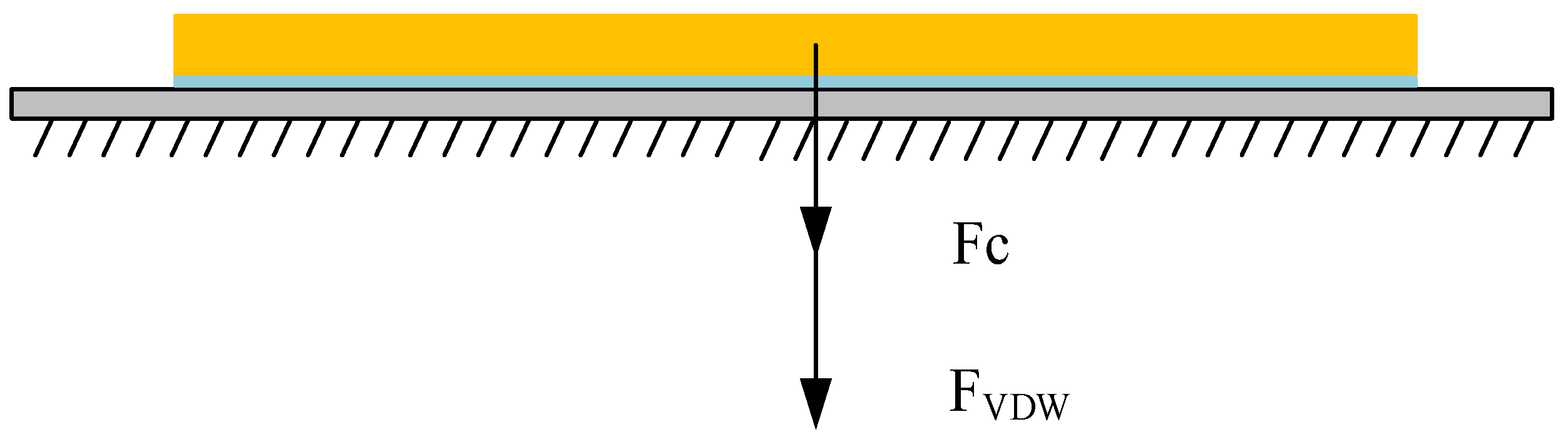
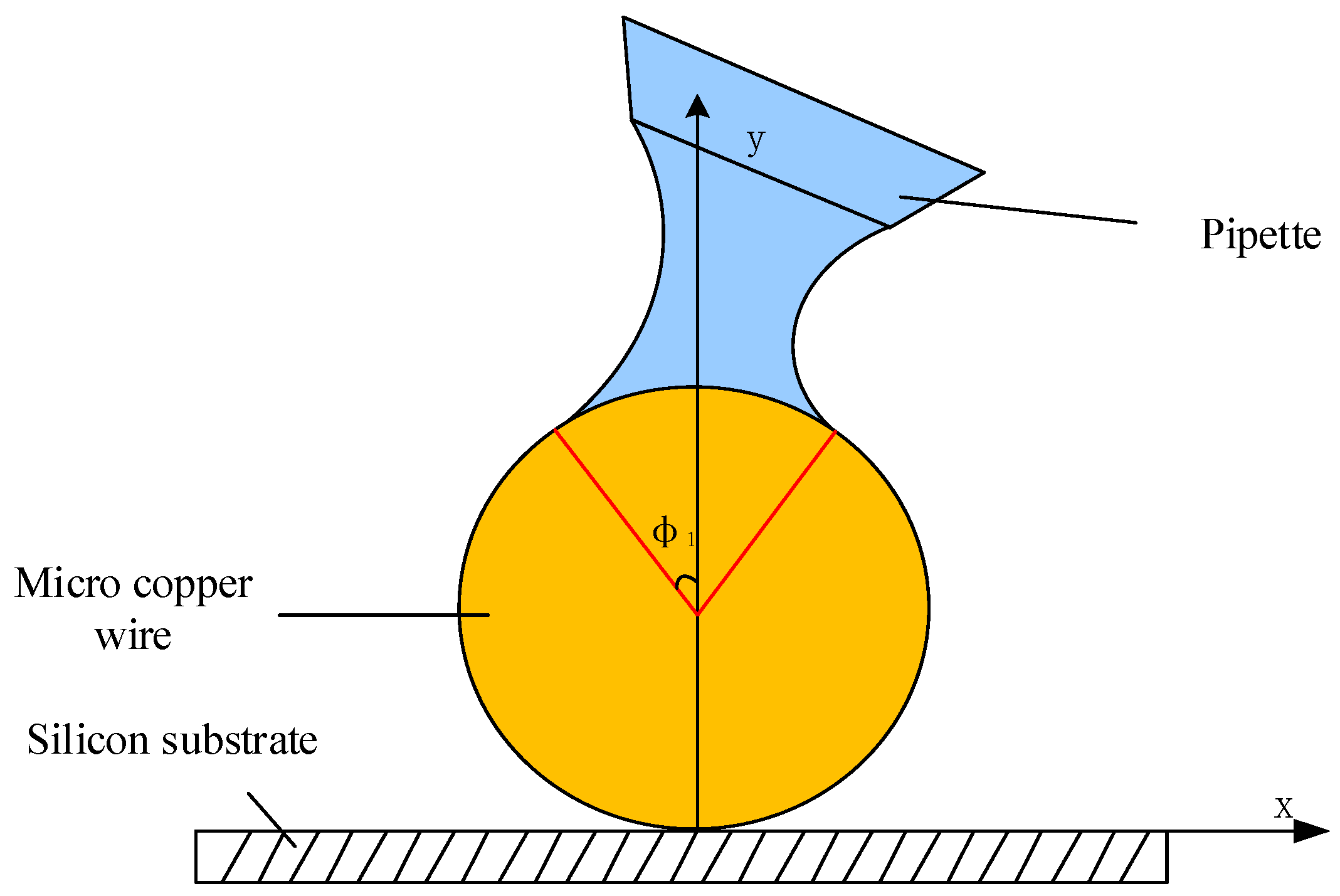
2.3. Theory and Simulation Analysis
3. Results and Discussion
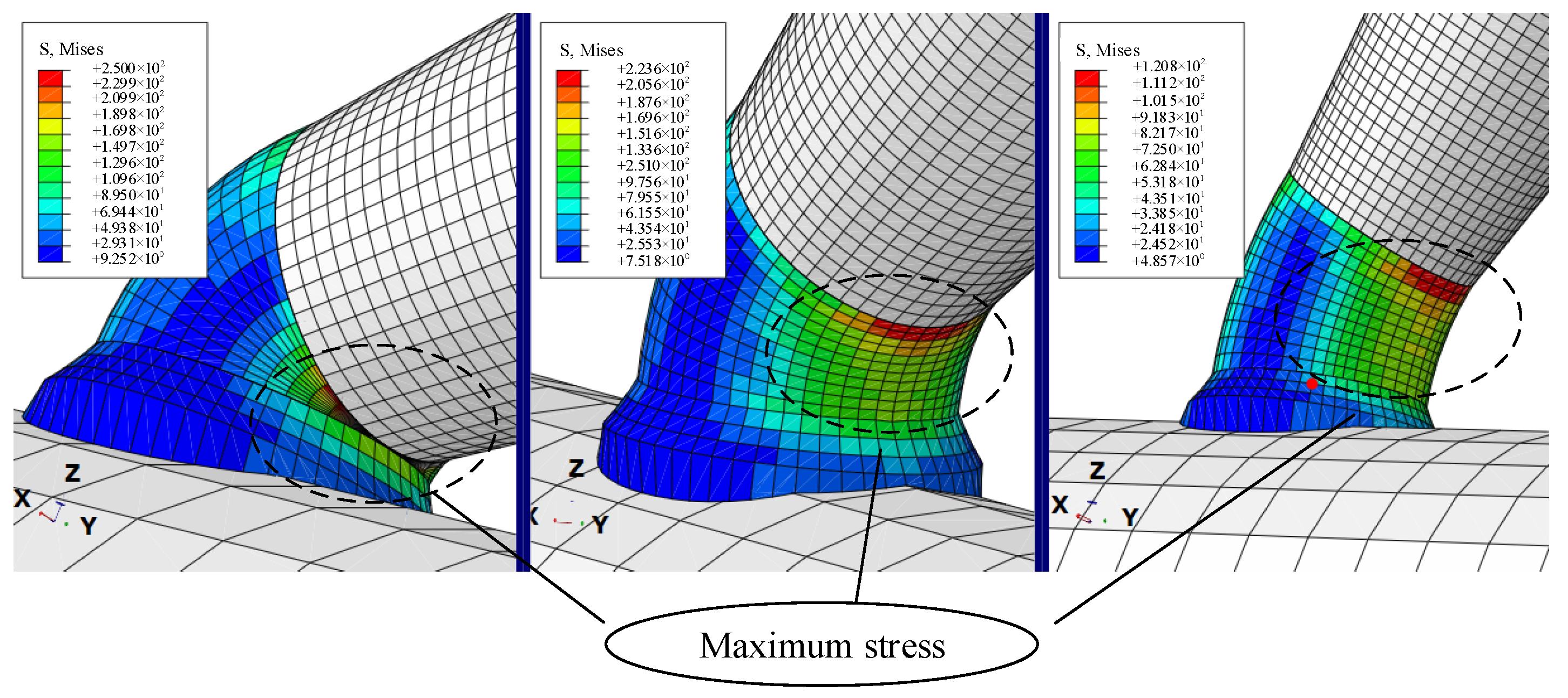
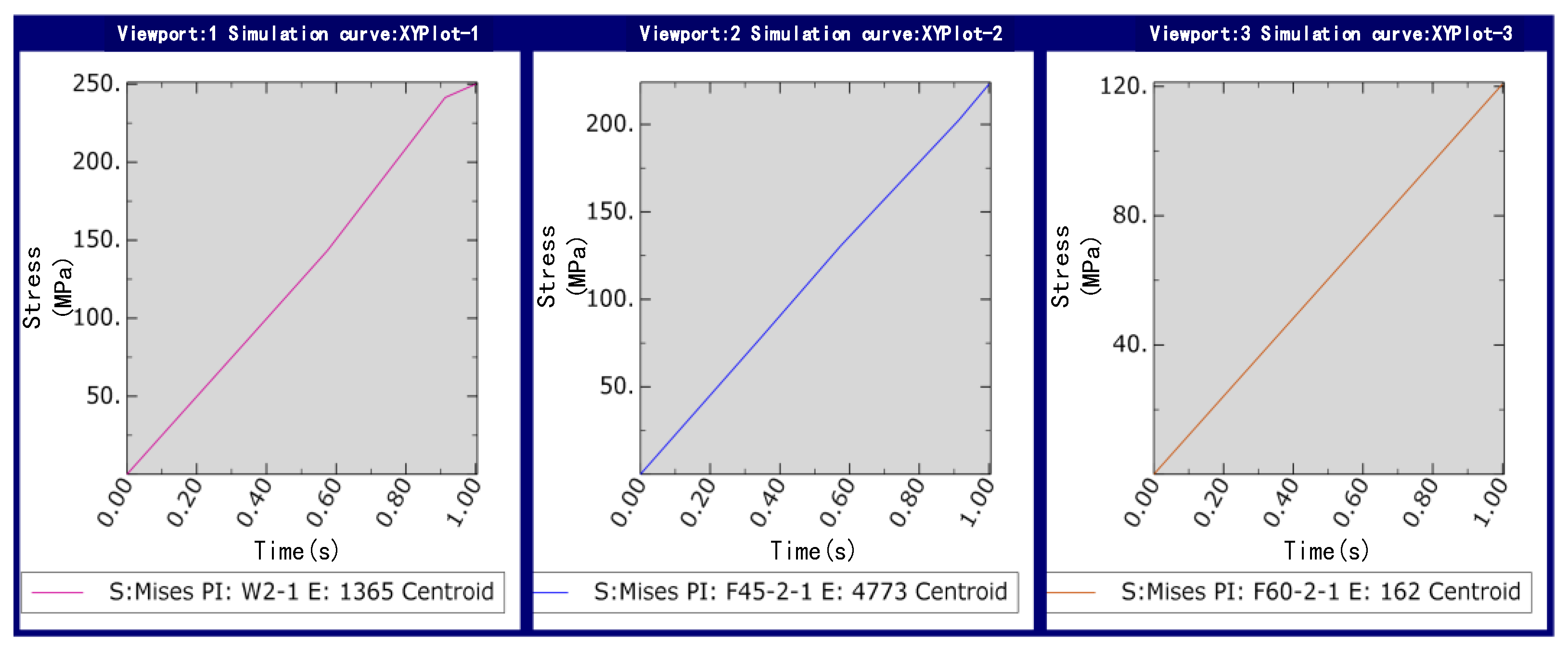
3.1. Dynamic Simulation
3.2. Experimental Verification
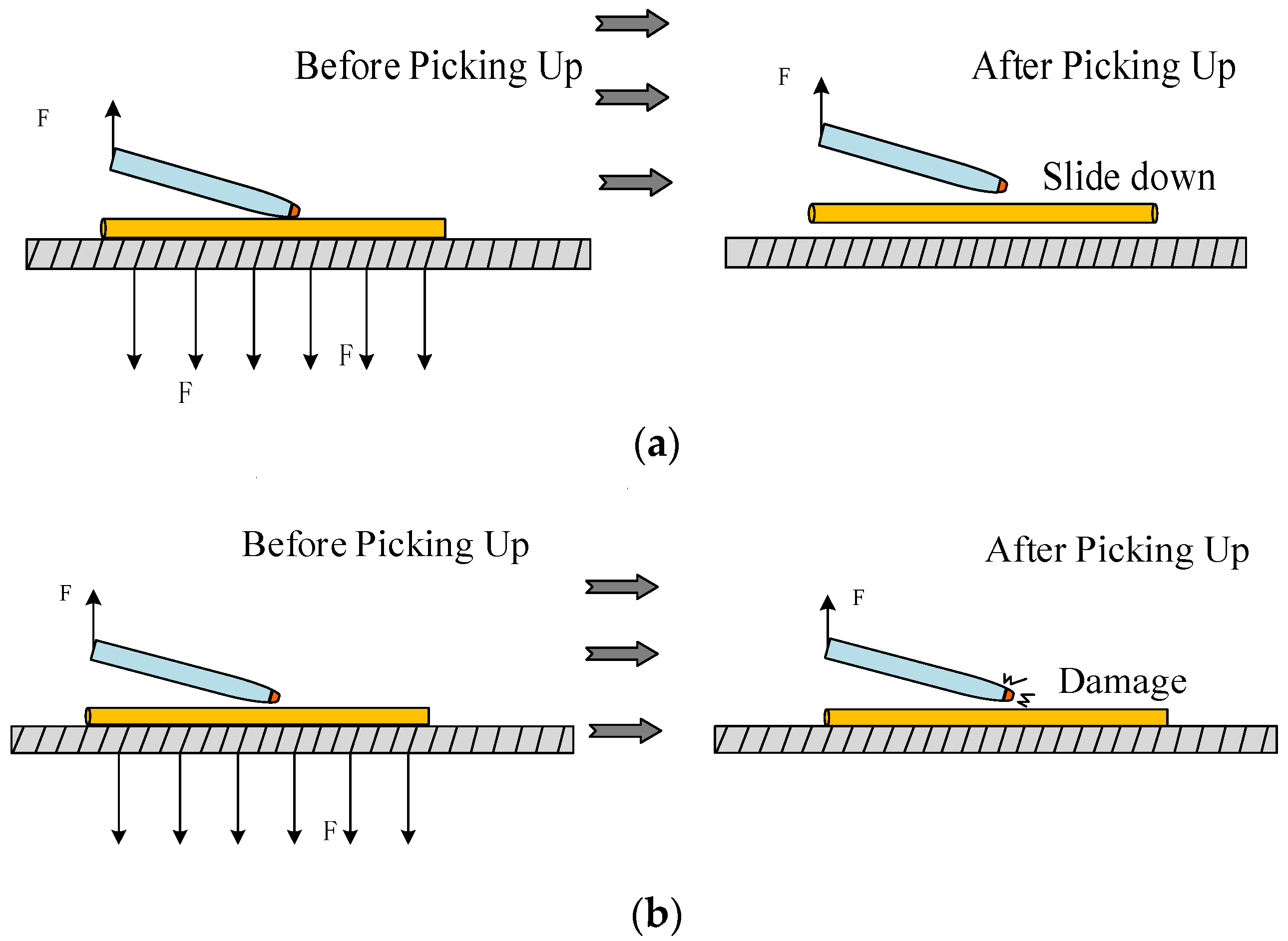
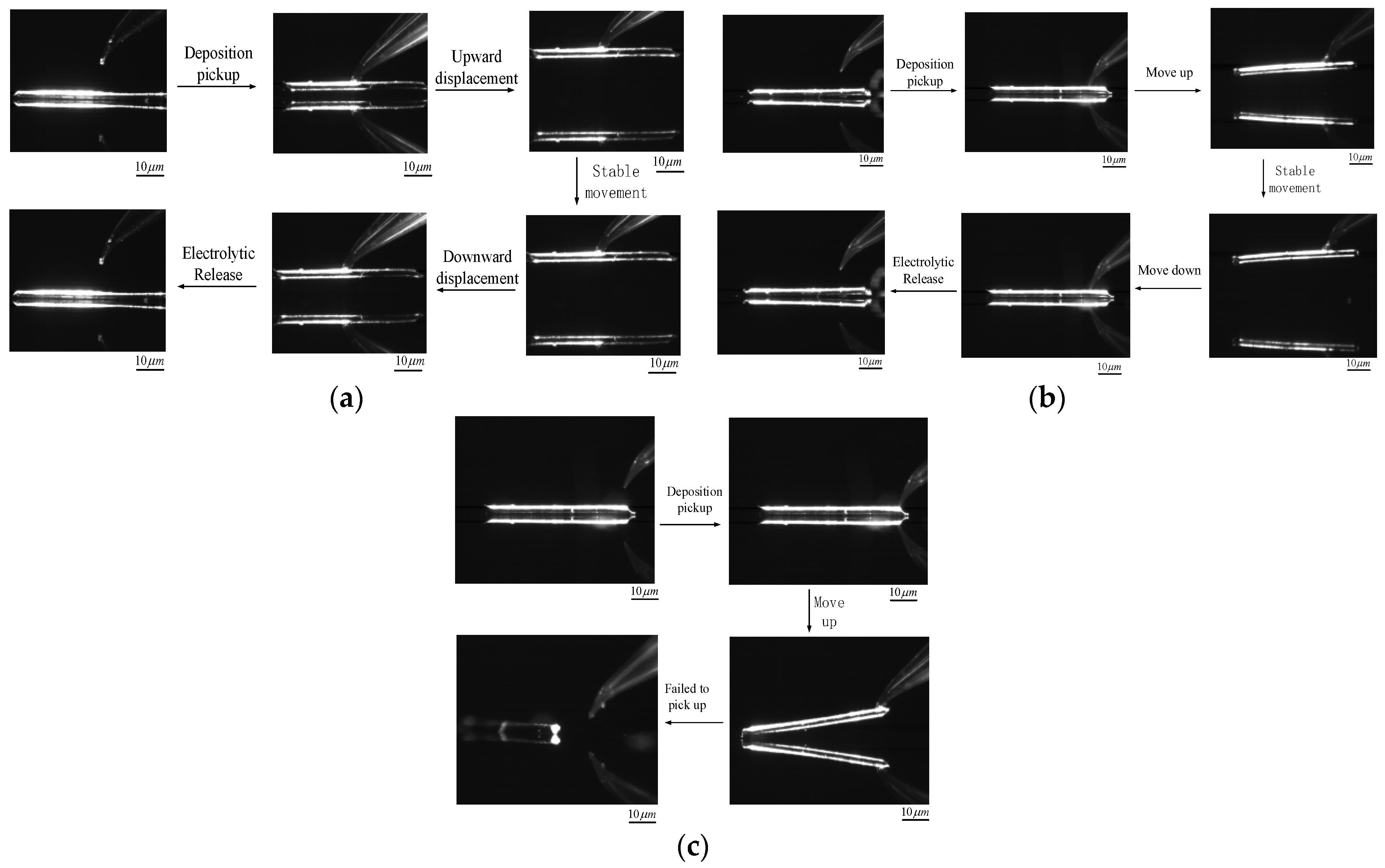
3.2.1. Micromanipulation Experiment Verification at Different Manipulating Points
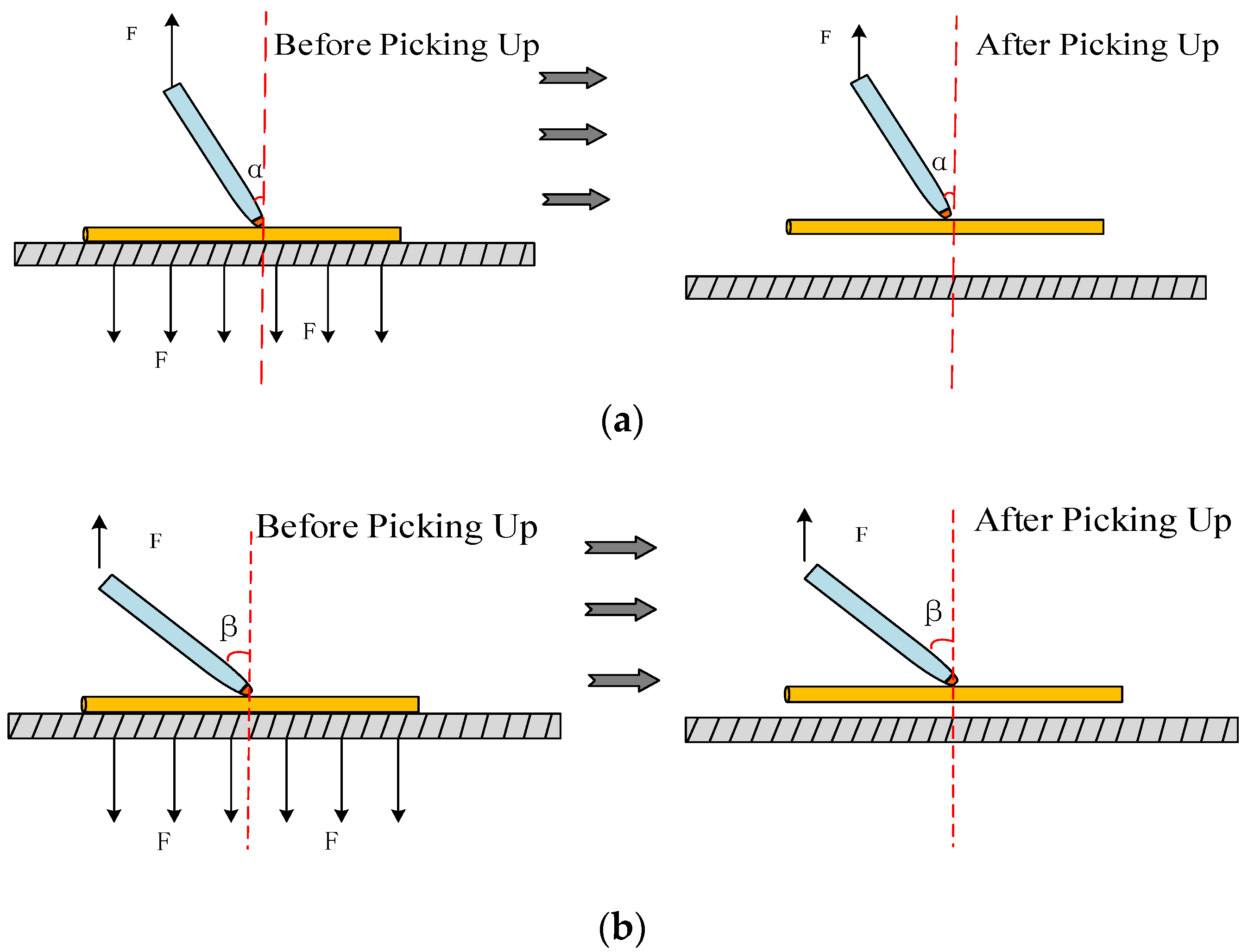
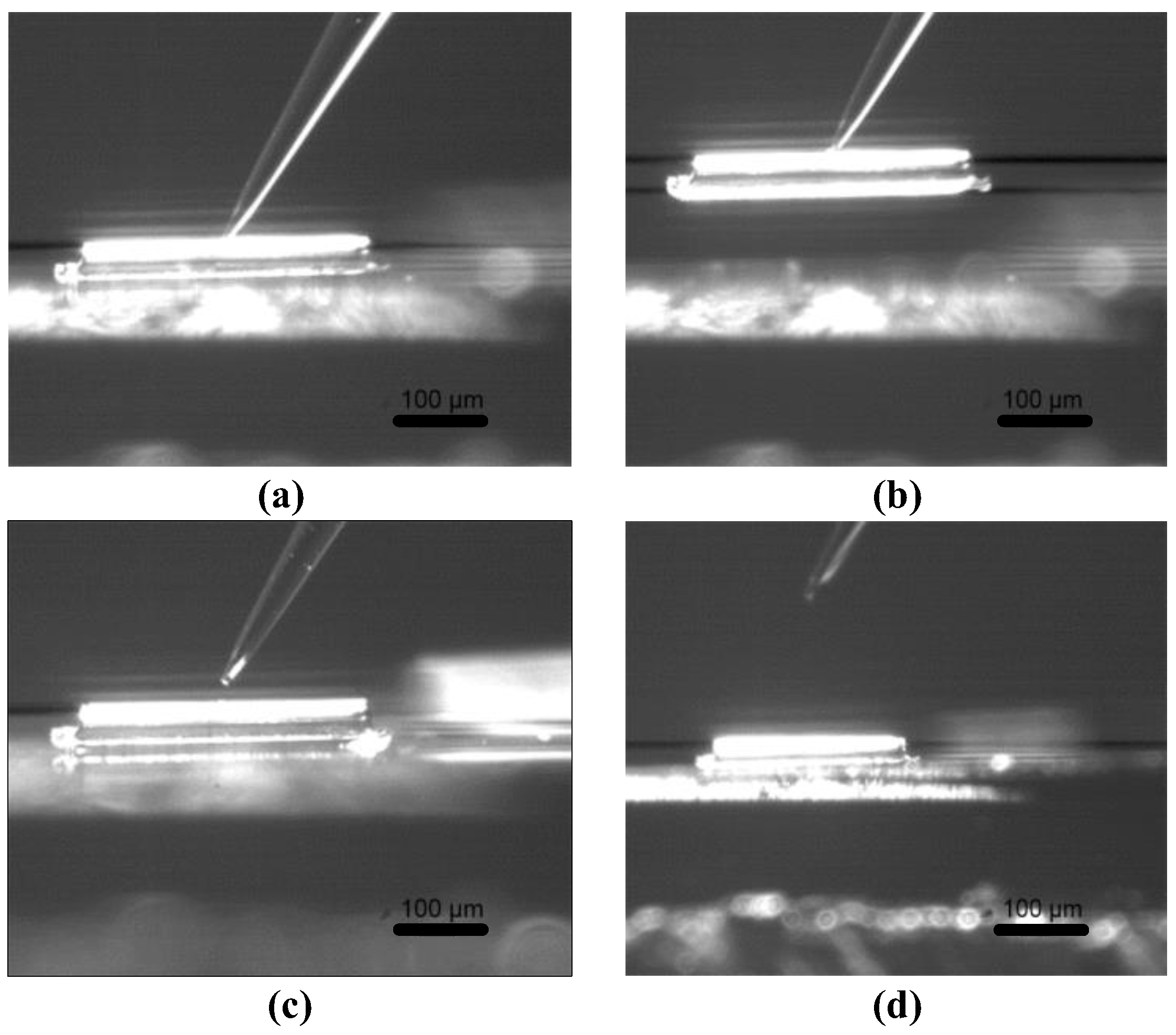
3.2.2. Micromanipulation Experiment Verification at Different Manipulating Angle
3.3. Experimental Result
4. Conclusions
- The average time to complete the manipulation was 182 s and 298 s when the pipette angle was between 45° and 60°. The most efficient pick-and-place manipulation was performed for copper wires with a length of 300 μm.
- When the manipulation point was selected at the four-fifths position of the copper wire, the total manipulation time was about 540 s; when the manipulation point was selected at the middle position of the copper wire, the total manipulation time was about 551 s. When the manipulation point is in the middle position, there is almost no change in the trait structure change of the metal. Considering the actual production needs, the middle point was selected as the most suitable position for the manipulation strategy.
- The object manipulated in this paper was copper wire, and the strategy proposed in this paper can be applied to the micron-level metal manipulation of different materials. When the hardness of other metals meets the actual manipulation requirements, the manipulating position selected can deviate from the center point. The overall manipulation time is shortened by about 10~15 s compared to the center point position.
5. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bendre, A.; Bhat, P.; Lee, K.H.; Altalhi, T.; Alruqi, M.A.; Kurkuri, M. Recent Developments in microfluidic technology for synthesis and toxicity-efficiency studies of biomedical nanomaterials. Mater. Today Adv. 2022, 13, 1–17. [Google Scholar] [CrossRef]
- Bhat, M.; Thendral, V.; Uthappa, U.T.; Lee, K.H.; Kigga, M.; Altalhi, T.; Kurkuri, M.D.; Kant, K. Recent Advances in microfluidic platform for physical and immunological detection and capture of circulating tumor cells. Biosensors 2022, 12, 27–37. [Google Scholar] [CrossRef] [PubMed]
- Mahmud, M.A.P.; Bazaz, S.R.; Dabiri, S.; Mehrizi, A.A.; Asadnia, M.; Warkiani, M.E.; Wang, Z.L. Advances in MEMS and microfluidics-based energy harvesting technologies. Adv. Mater. Technol. 2022, 7, 7–14. [Google Scholar] [CrossRef]
- Liang, C.F.; Wang, F.J.; Shi, B.C.; Huo, Z.C.; Zhou, K.H.; Tian, Y.L.; Zhang, D.W. Design and control of a novel asymmetrical piezoelectric actuated microgripper for micromanipulation. Sens. Actuators A Phys. 2018, 269, 227–237. [Google Scholar] [CrossRef]
- Zhang, R.; Chu, J.K.; Wang, H.X.; Chen, Z.P. A multipurpose electrothermal microgripper for biological micro-manipulation. Microsyst. Technol. 2013, 19, 89–97. [Google Scholar] [CrossRef]
- Beyeler, F.; Neild, A.; Oberti, S.; Bell, D.J.; Sun, Y.; Dual, J.; Nelson, B.J. Monolithically fabricated microgripper with integrated force sensor for manipulating microobjects and biological cells aligned in an ultrasonic field. J. Microelectromechanical Syst. 2007, 16, 7–15. [Google Scholar] [CrossRef]
- Inoue, K.; Matsuzaki, Y.; Lee, S. Micromanipulation using micro hand with two rotational fingers. J. Micro-Nano Mechatron. 2012, 7, 33–44. [Google Scholar] [CrossRef]
- Tamadazte, B.; Piat, N.L.; Dembélé, S. Robotic micromanipulation and microassembly using monoview and multiscale visual servoing. IEEE ASME Trans. Mechatron. 2011, 16, 277–287. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.S.; Bhat, M.P.; Kim, C.S.; Kim, J.; Lee, K.H. Improved 3D-printability of cellulose acetate to mimic water absorption in plant roots through nanoporous networks. Macromolecules 2022, 55, 1855–1865. [Google Scholar] [CrossRef]
- Zheng, Z.P.; Zhang, J.F.; Feng, P.F.; Wang, J.J. Controllable fabrication of microstructures on the metallic surface using oblique rotary ultrasonic milling. Int. J. Mech. Sci. 2022, 237, 107805. [Google Scholar] [CrossRef]
- Fan, Z.H.; Wang, L.F.; Rong, W.B.; Sun, L.N. Dropwise condensation on a hydrophobic probe-tip for manipulating micro-objects. J. Phys. Chem. Lett. 2015, 106, 84105. [Google Scholar] [CrossRef]
- Fantoni, G.; Hansen, H.N.; Santochi, M. A new capillary gripper for mini and micro parts. CIRP Ann. 2013, 62, 17–20. [Google Scholar] [CrossRef]
- Wan, Y.Y.; Gao, Y.; Xia, Z.H. Highly switchable adhesion of n-doped graphene interfaces for robust micromanipulation. ACS Appl. Mater. Interfaces 2019, 11, 5544–5553. [Google Scholar] [CrossRef]
- Wang, L.F.; Chu, Z.Q.; Fan, Z.H.; Rong, W.B. Simulation of liquid meniscus and microdrop formation of a capillary gripper for microparts transfer. Adv. Mater. Res. 2014, 971, 915–919. [Google Scholar] [CrossRef]
- Zhang, Q.; Gan, Y.; Huang, W.H.; Aoyama. Mechanism analysis and experiments of liquid-drop micromanipulator. Robot 2014, 36, 430. [Google Scholar]
- Li, D.J.; Xu, J.Y.; Rong, W.B.; Yang, L. Simulation of picking up metal microcomponents based on electrochemistry. Micromachines 2020, 11, 33. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hamaker, H. The London—Van der Waals attraction between spherical particles. Physica 1937, 23, 2123–2131. [Google Scholar] [CrossRef]
- Rabinovich, Y.I.; Esayanur, M.L.; Moudgil, B.M. Capillary forces between two spheres with a fixed volume liquid bridge: Theory and experiment. Langmuir 2005, 21, 10992–10997. [Google Scholar] [CrossRef]
- Lambert, P.; Chau, A.; Delchambre, A.; Regnier, S. Comparison between two capillary forces models. Langmuir 2008, 24, 3157–3163. [Google Scholar] [CrossRef]
- Gor, G.Y.; Huber, P.; Bernstein, N. Adsorption-induced deformation of nanoporous materials—A review. Appl. Phys. Rev. 2017, 4, 1051–1209. [Google Scholar] [CrossRef] [Green Version]
- Altabet, Y.E.; Haji-Akbari, A.; Debenedetti, P.G. Effect of material flexibility on the thermodynamics and kinetics of hydrophobically induced evaporation of water. Proc. Natl. Acad. Sci. USA 2017, 114, E2548. [Google Scholar] [CrossRef] [PubMed]
- Li, D.J.; Wang, M.R.; Xu, J.Y.; Yang, L.; Zhang, Y. Simulation of metal microcomponents picking up by electrochemical based on ABAQUS. Mod. Phys. Lett. B 2021, 35, 27. [Google Scholar] [CrossRef]
- De Hijes, P.M.; Shi, K.; Noya, E.G.; Santiso, E.E.; Gubbins, K.E.; Sanz, E.; Vega, C. The Young-Laplace equation for a solid-liquid interface. J. Chem. Phys. 2020, 153, 191102. [Google Scholar] [CrossRef] [PubMed]
- Teixeira, P.I.C.; Teixeira, M.A.C. The shape of two-dimensional liquid bridges. J. Phys-Condens. Mat. 2020, 32, 034002. [Google Scholar] [CrossRef] [PubMed]
- Mo, J.W.; Sha, J.J.; Li, D.K.; Li, Z.G.; Chen, Y.F. Fluid release pressure for nanochannels: The Young-Laplace equation using the effective contact angle. Nanoscale 2019, 11, 8408–8415. [Google Scholar] [CrossRef]
- Yang, Q.; Sun, P.Z.; Fumagalli, L.; Stebunov, Y.V.; Haigh, S.J.; Zhou, Z.W.; Grigorieva, I.V.; Wang, F.C.; Geim, A.K. Capillary condensation under atomic-scale confinement. Nature 2020, 588, 250–253. [Google Scholar] [CrossRef]
- Thomson, W. On the equilibrium of vapour at a curved surface of liquid. Proc. R. Soc. Edinb. A 1872, 7, 63–68. [Google Scholar] [CrossRef] [Green Version]
- Ma, H.Y.; Yu, M.Z.; Jin, H.H. Product modeling design based on genetic algorithm and BP neural network. J. Hydrodyn. 2020, 12, 21. [Google Scholar]
- Jain, R.K.; Patkar, U.S.; Majumdar, S. Micro gripper for micromanipulation using IPMCs (ionic polymer metal composites). J. Sci. Ind. Res. 2009, 68, 23–28. [Google Scholar]
- Kasaya, T.; Miyazaki, H.T.; Saito, S.; Koyano, K.; Yamaura, T.; Sato, T. Image-based autonomous micromanipulation system for arrangement of spheres in a scanning electron microscope. Rev. Sci. Instrum. 2004, 75, 2033. [Google Scholar] [CrossRef]
- Semerdzhiev, S.A.; Fakhree, M.A.A.; Segers-Nolten, I.; Blum, C.; Claessens, M.M.A.E. Interactions between SARS-CoV-2 N-Protein and alpha-synuclein accelerate amyloid formation. ACS. Chem. Neurosci. 2022, 13, 143–150. [Google Scholar] [CrossRef] [PubMed]
- Sadale, S.B.; Patil, S.B.; Teli, A.M.; Masegi, H.; Noda, K. Effect of deposition potential and annealing on performance of electrodeposited copper oxide thin films for supercapacitor application. Solid State Sci. 2022, 123, 106780. [Google Scholar] [CrossRef]
- Liu, Z.H.; Bi, Q.C.; Feng, J.T. Evaluation of heat sink capability and deposition propensity of supercritical endothermic fuels in a minichannel. Fuel 2015, 158, 388–398. [Google Scholar] [CrossRef]
- Zhang, F.Y.; Li, D.J.; Rong, W.B.; Yang, L.; Zhang, Y. Study of microscale meniscus confined electrodeposition based on COMSOL. Micromachines 2021, 12, 1591. [Google Scholar] [CrossRef] [PubMed]
- Erinosho, M.F.; Akinlabi, E.T.; Pityana, S. Influence of processing parameters on laser metal deposited copper and titanium alloy composites. T. Nonferr. Metal. Soc. 2015, 25, 9. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manipulation Time (s) | Copper Wire Midpoint | Copper Wire at 4/5 | Copper Wire at the Edge | |
|---|---|---|---|---|
| Group 1 | Pick-up time | 192 | 196 | 215 |
| Release time | 358 | 345 | / | |
| Manipulation time | 550 | 541 | / | |
| Group 2 | Pick-up time | 185 | 179 | 175 |
| Release time | 366 | 345 | / | |
| Manipulation time | 551 | 524 | / | |
| Group 3 | Pick-up time | 203 | 215 | 211 |
| Release time | 378 | 356 | / | |
| Manipulation time | 581 | 571 | / | |
| Group 4 | Pick-up time | 175 | 183 | 194 |
| Release time | 353 | 345 | / | |
| Manipulation time | 528 | 528 | / | |
| Group 5 | Pick-up time | 186 | 193 | 206 |
| release time | 362 | 345 | / | |
| Manipulation time | 548 | 538 | / | |
| Manipulation Time (s) | t < 45° | 45° < t < 60° | t = 90° | |
|---|---|---|---|---|
| Pick-up time | Group 1 | 175 | 181 | 223 |
| Group 2 | 178 | 179 | 236 | |
| Group 3 | 169 | 186 | 219 | |
| Average | 174 | 182 | 226 | |
| Release time | Group 1 | / | 311 | 378 |
| Group 2 | / | 286 | 364 | |
| Group 3 | / | 297 | 372 | |
| Average | / | 298 | 371 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Wang, M.; Rong, W.; Yang, L.; Xu, D.; Zhang, Y. Study on the Manipulation Strategy of Metallic Microstructures Based on Electrochemical-Assisted Method. Micromachines 2022, 13, 2151. https://doi.org/10.3390/mi13122151
Li D, Wang M, Rong W, Yang L, Xu D, Zhang Y. Study on the Manipulation Strategy of Metallic Microstructures Based on Electrochemical-Assisted Method. Micromachines. 2022; 13(12):2151. https://doi.org/10.3390/mi13122151
Chicago/Turabian StyleLi, Dongjie, Mingrui Wang, Weibin Rong, Liu Yang, Donghao Xu, and Yu Zhang. 2022. "Study on the Manipulation Strategy of Metallic Microstructures Based on Electrochemical-Assisted Method" Micromachines 13, no. 12: 2151. https://doi.org/10.3390/mi13122151