
Dynamic Enhancement for Dual Active Bridge Converter with a Deadbeat Current Controller
Abstract
:1. Introduction
2. Deadbeat Peak Current Mode Controller
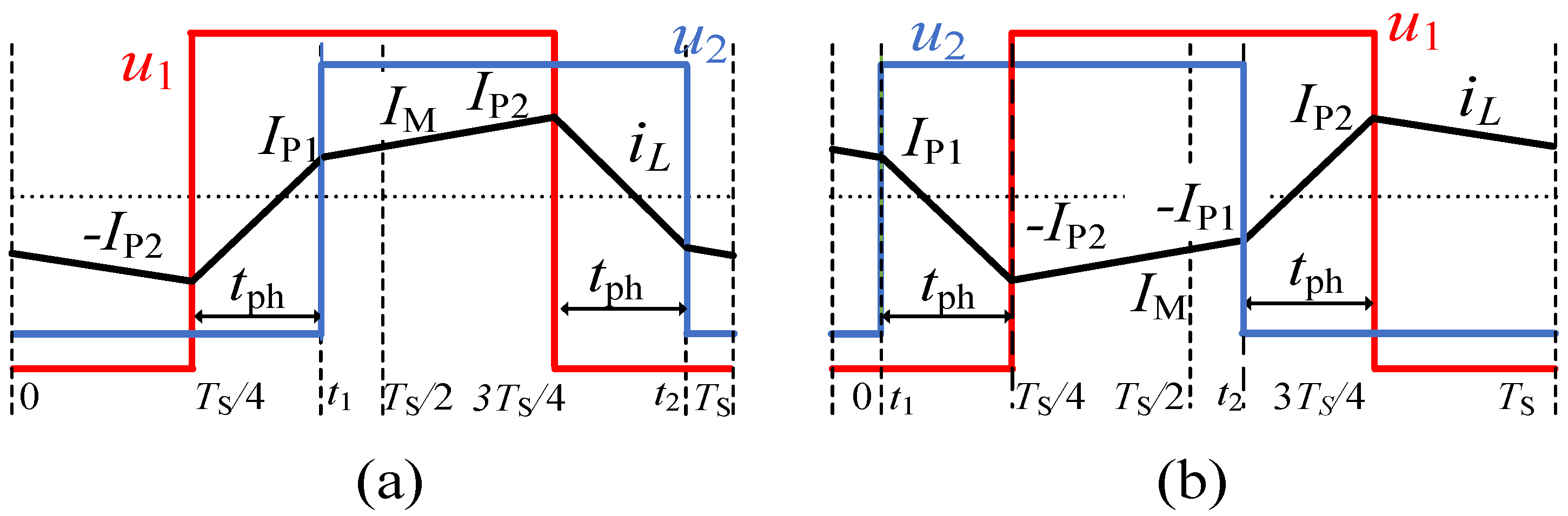
2.1. Basic Model of IBDC for SPS Modulation
2.2. Peak Current Mode Controller
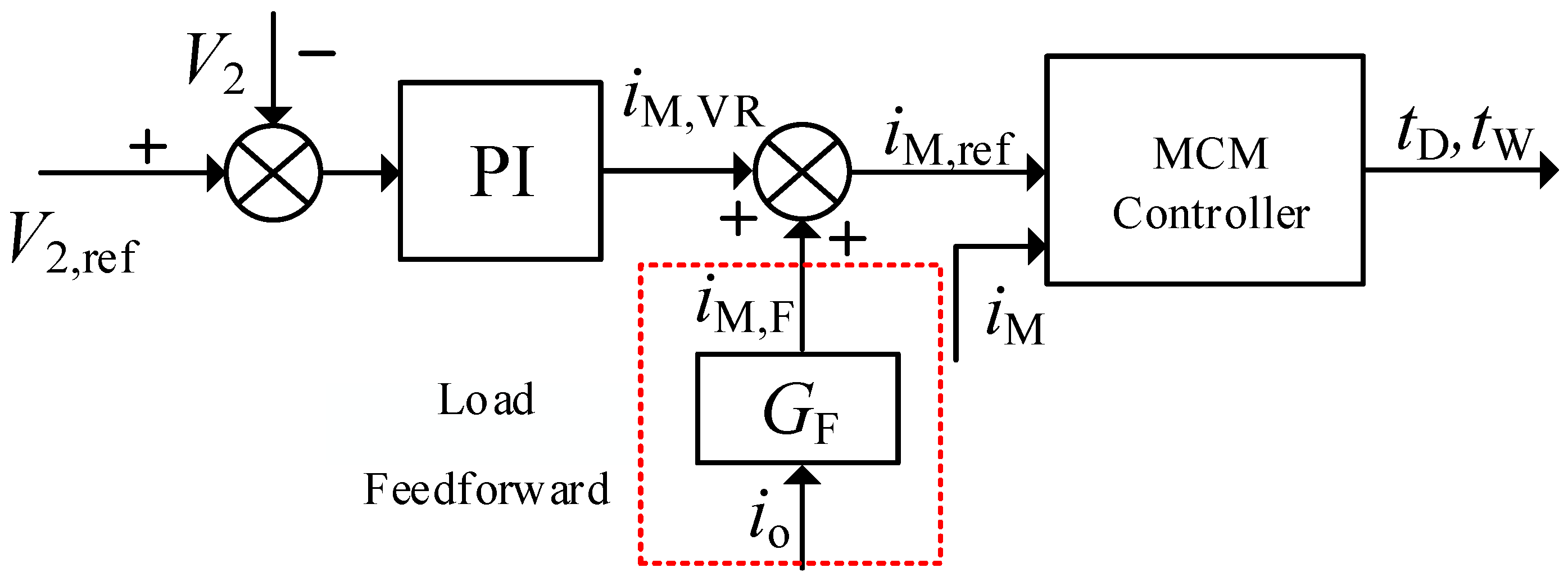
3. Double-Closed-Loop Control with Load Feedforward
4. Experimental Verification
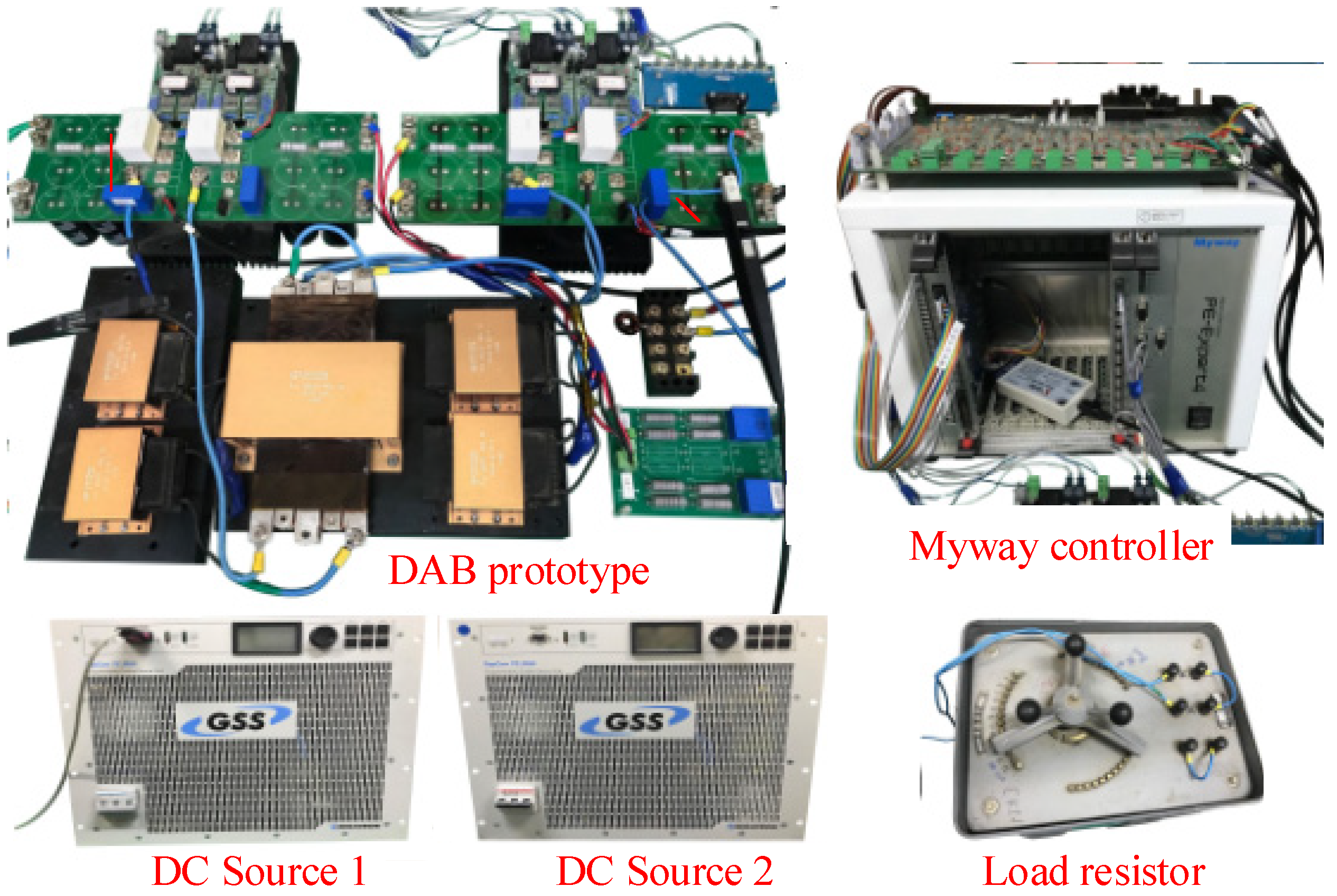
4.1. Experimental Platform
4.2. Comparisons of Different Current Controllers for Forward Power Transmission
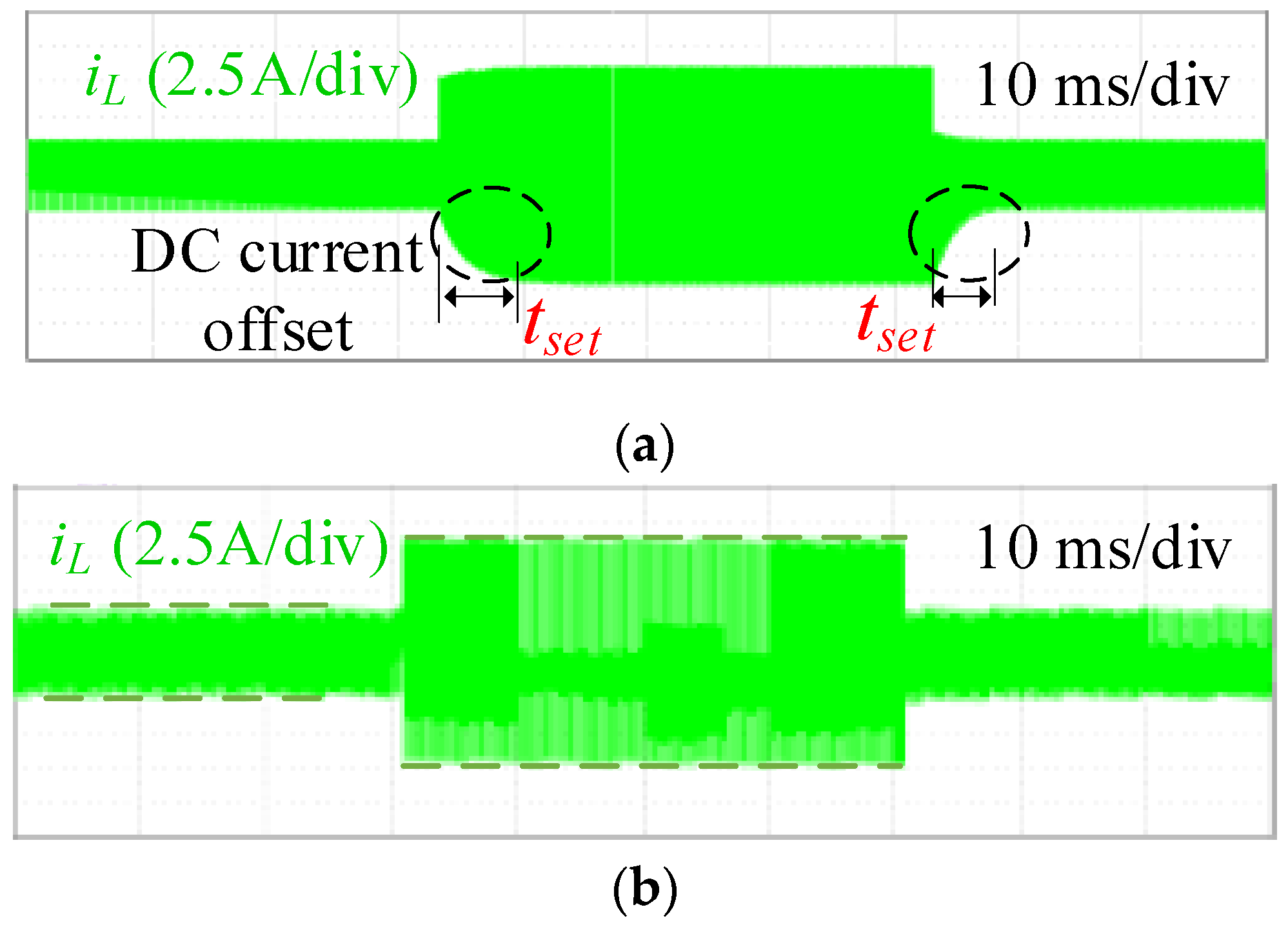
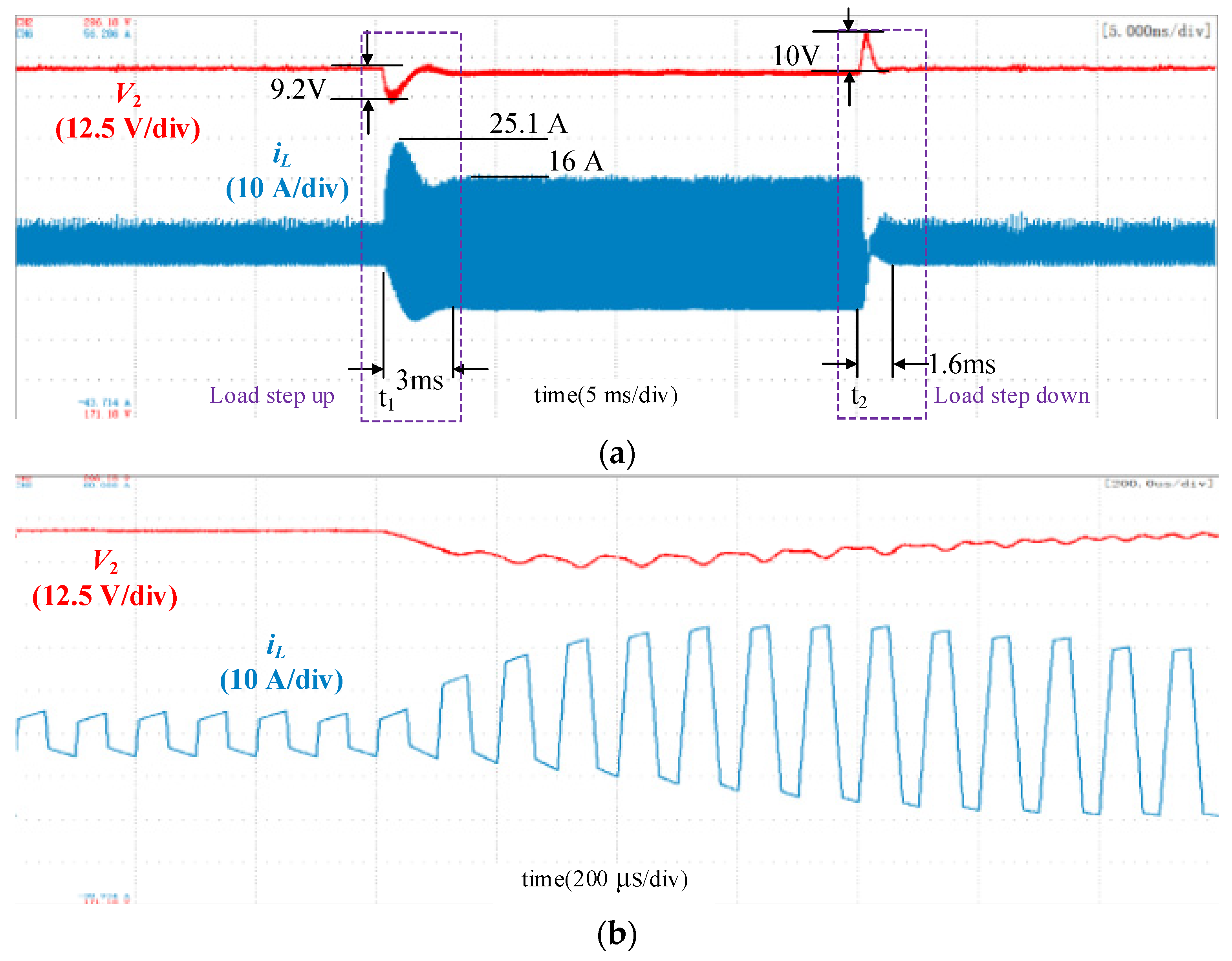
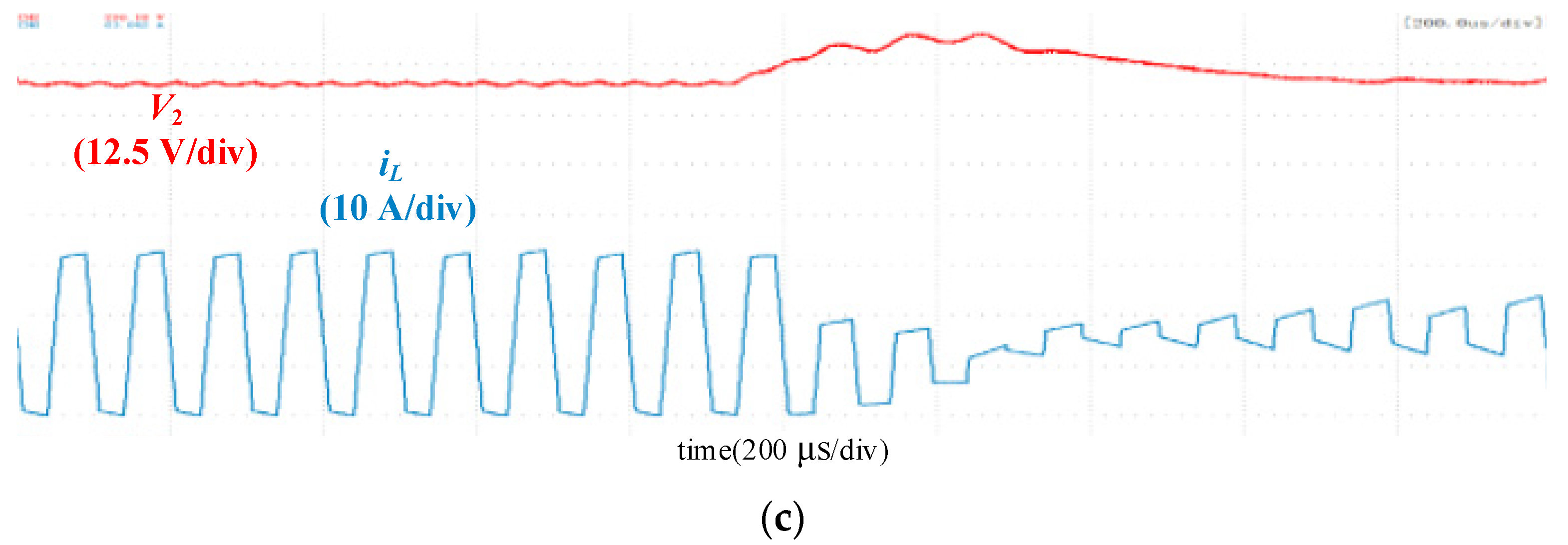
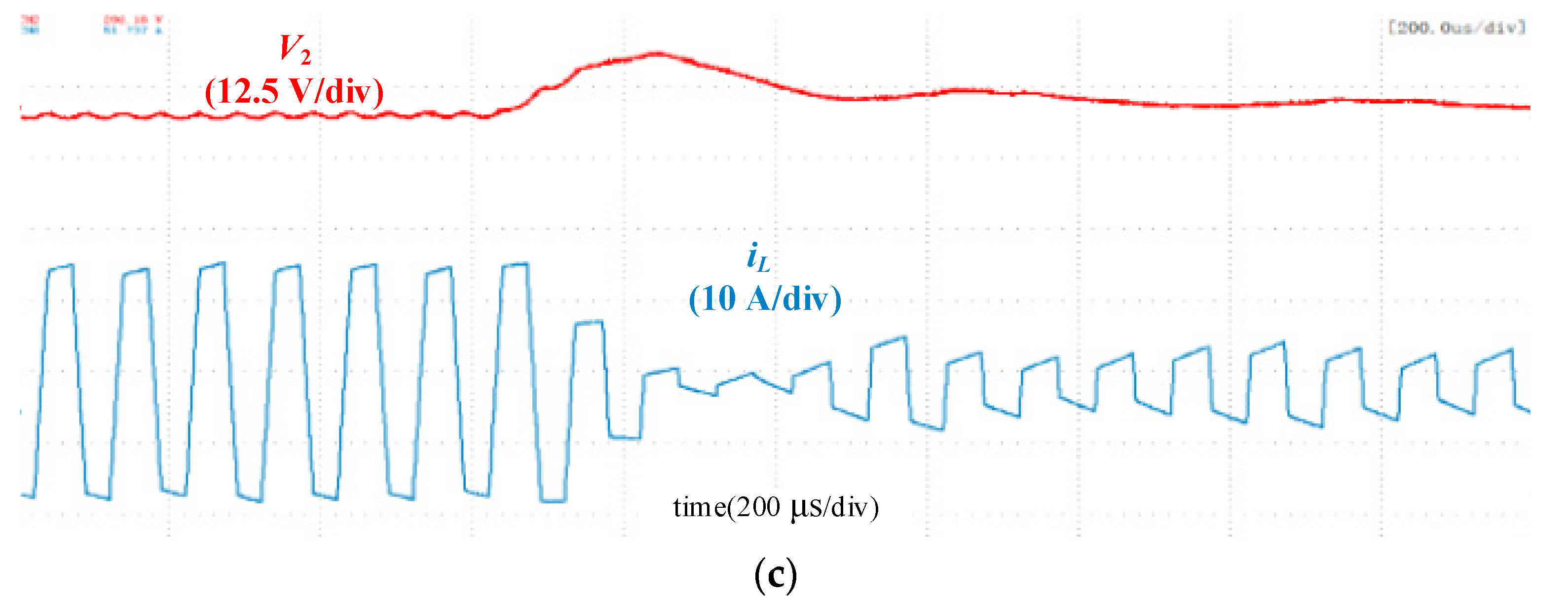
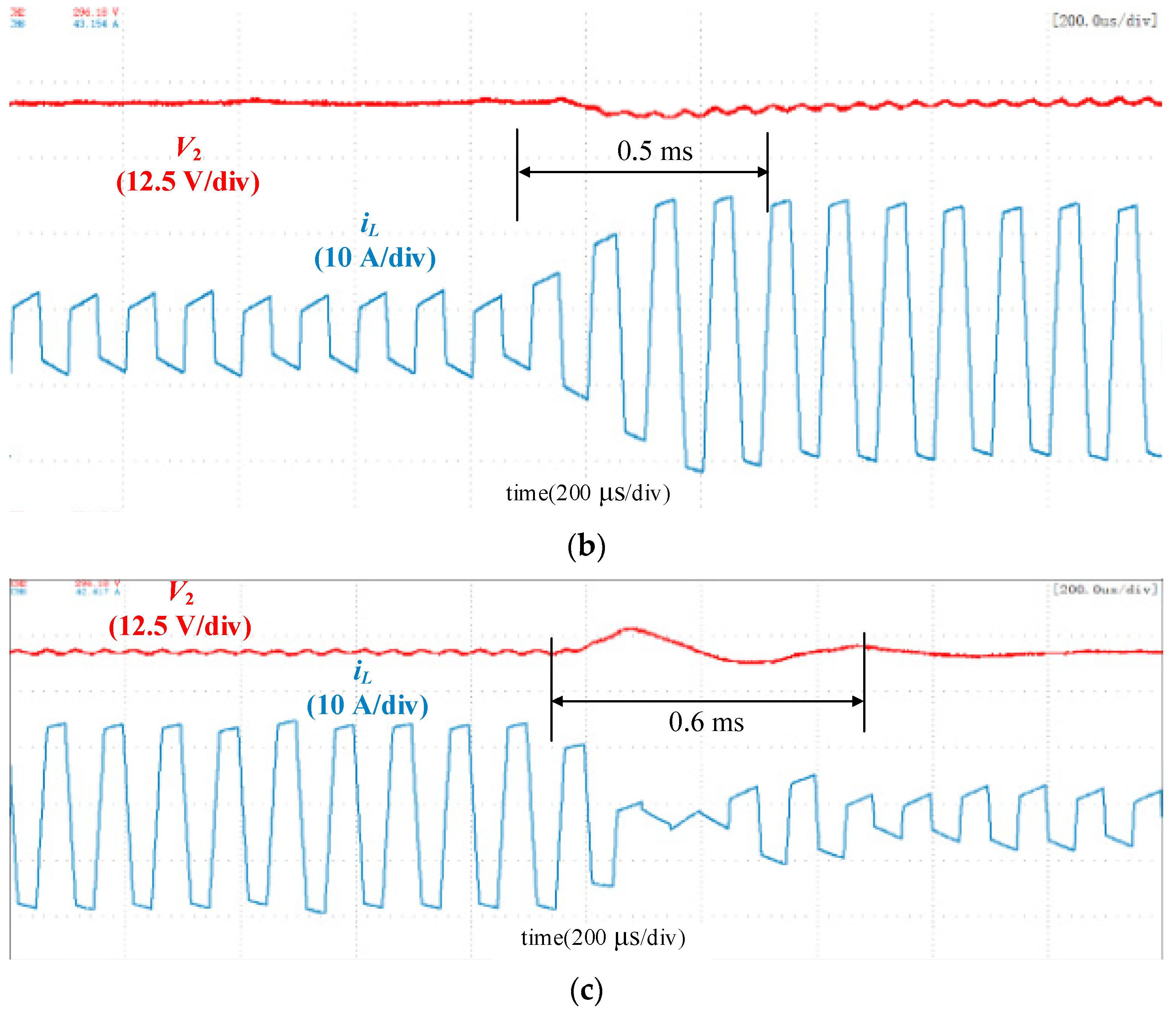
4.3. Dynamic Performance Comparison between Different Control Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hou, N.; Li, Y. Overview and comparison of modulation and control strategies for non-resonant single-phase dual-active-bridge dc-dc converter. IEEE Trans. Power Electron. 2020, 35, 3148–3172. [Google Scholar] [CrossRef]
- Wei, S.; Di, M.; Wen, W.; Zhao, Z.; Li, K. Transient DC Bias and Universal Dynamic Modulation of Multiactive Bridge Converters. IEEE Trans. Power Electron. 2021, 37, 11516–11522. [Google Scholar] [CrossRef]
- Hu, J.; Cui, S.; von den Hoff, D.; De Doncker, W.R. Generic dynamic phase-shift control for bidirectional dual-active bridge converters. IEEE Trans. Power Electron. 2021, 36, 6197–6202. [Google Scholar] [CrossRef]
- Yang, C.; Wang, J.; Wang, C.; You, X.; Xu, L. Transient DC Bias Current Reducing for Bidirectional Dual-Active-Bridge DC–DC Converter by Modifying Modulation. IEEE Trans. Power Electron. 2021, 36, 13149–13161. [Google Scholar] [CrossRef]
- Bu, Q.; Wen, H.; Shi, H.; Hu, Y.; Yang, Y. Universal Transient DC-Bias Current Suppression Strategy in Dual-Active-Bridge Converters for Energy Storage Systems. IEEE Trans. Transp. Electrif. 2021, 7, 509–526. [Google Scholar] [CrossRef]
- Dutta, S.; Hazra, S.; Bhattacharya, S. A digital predictive current mode controller for a single-phase high-frequency transformer-isolated dual-active bridge dc-to-dc converter. IEEE Trans. Ind. Electron. 2016, 63, 5943–5952. [Google Scholar] [CrossRef]
- Nasr, M.; Poshtkouhi, S.; Radimov, N.; Cojocaru, C.; Trescases, O. Fast average current mode control of dual-active-bridge dc–dc converter using cycle-by-cycle sensing and self-calibrated digital feedforward. In Proceedings of the Annual IEEE Conference on Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 1129–1133. [Google Scholar]
- Shan, Z.; Jatskevich, J.; Iu, H.H.; Fernando, T. Simplified load -feedforward control design for dual-active-bridge converters with current-mode modulation. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2073–2085. [Google Scholar] [CrossRef]
- Wei, S.; Zhao, Z.; Li, K.; Yuan, L.; Wen, W. Deadbeat Current Controller for Bidirectional Dual-Active-Bridge Converter Using an Enhanced SPS Modulation Method. IEEE Trans. Power Electron. 2021, 36, 1274–1279. [Google Scholar] [CrossRef]
- Saggini, S.; Stefanutti, W.; Tedeschi, E.; Mattavelli, P. Digital Deadbeat Control Tuning for dc-dc Converters Using Error Correlation. IEEE Trans. Power Electron. 2007, 22, 1566–1570. [Google Scholar] [CrossRef]
- Bai, H.; Nie, Z.; Mi, C.C. Experimental Comparison of Traditional Phase-Shift, Dual-Phase-Shift, and Model-Based Control of Isolated Bidirectional DC–DC Converters. IEEE Trans. Power Electron. 2010, 25, 1444–1449. [Google Scholar] [CrossRef]
- Segaran, D.; Holmes, G.D.; McGrath, P.B. Enhanced load step response for a bidirectional DC–DC converter. IEEE Trans. Power Electron. 2013, 28, 371–379. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | |||
|---|---|---|---|
| CSPS 0) | |||
| ESPS-PCM | Case 1 | ||
| Case 2 | |||
| Case 3 | |||
| Case 4 | |||
| ESPS-MCM | |||
| Input voltage V1 | 300 V | Output voltage V1 | 280 V |
| Turns ratio n | 1:1 | Switching frequency f | 10 kHz |
| Primary capacitor C1 | 2460 μF | Secondary capacitor C2 | 2460 μF |
| Inductor L | 652 μH | Equivalent resistor Rs | 80 mΩ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, C.; Wei, S.; Xie, J.; Bai, T. Dynamic Enhancement for Dual Active Bridge Converter with a Deadbeat Current Controller. Micromachines 2022, 13, 2048. https://doi.org/10.3390/mi13122048
Tian C, Wei S, Xie J, Bai T. Dynamic Enhancement for Dual Active Bridge Converter with a Deadbeat Current Controller. Micromachines. 2022; 13(12):2048. https://doi.org/10.3390/mi13122048
Chicago/Turabian StyleTian, Chengfu, Shusheng Wei, Jiayu Xie, and Tainming Bai. 2022. "Dynamic Enhancement for Dual Active Bridge Converter with a Deadbeat Current Controller" Micromachines 13, no. 12: 2048. https://doi.org/10.3390/mi13122048