
A Robust Tracking Method for Multiple Moving Targets Based on Equivalent Magnetic Force

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Introduction to Tracking Models
- Model 1: The heading and the speed remain constant during the movement of the magnetic target.
- Model 2: The heading remains constant, and the speed changes randomly during the movement of the magnetic target.
- Model 3: The heading changes randomly, and the speed remains constant during the movement of the magnetic target.
- Model 4: The heading and the speed change randomly during the movement of the magnetic target.
2.2. Introduction to Tracking Methods
3. Results
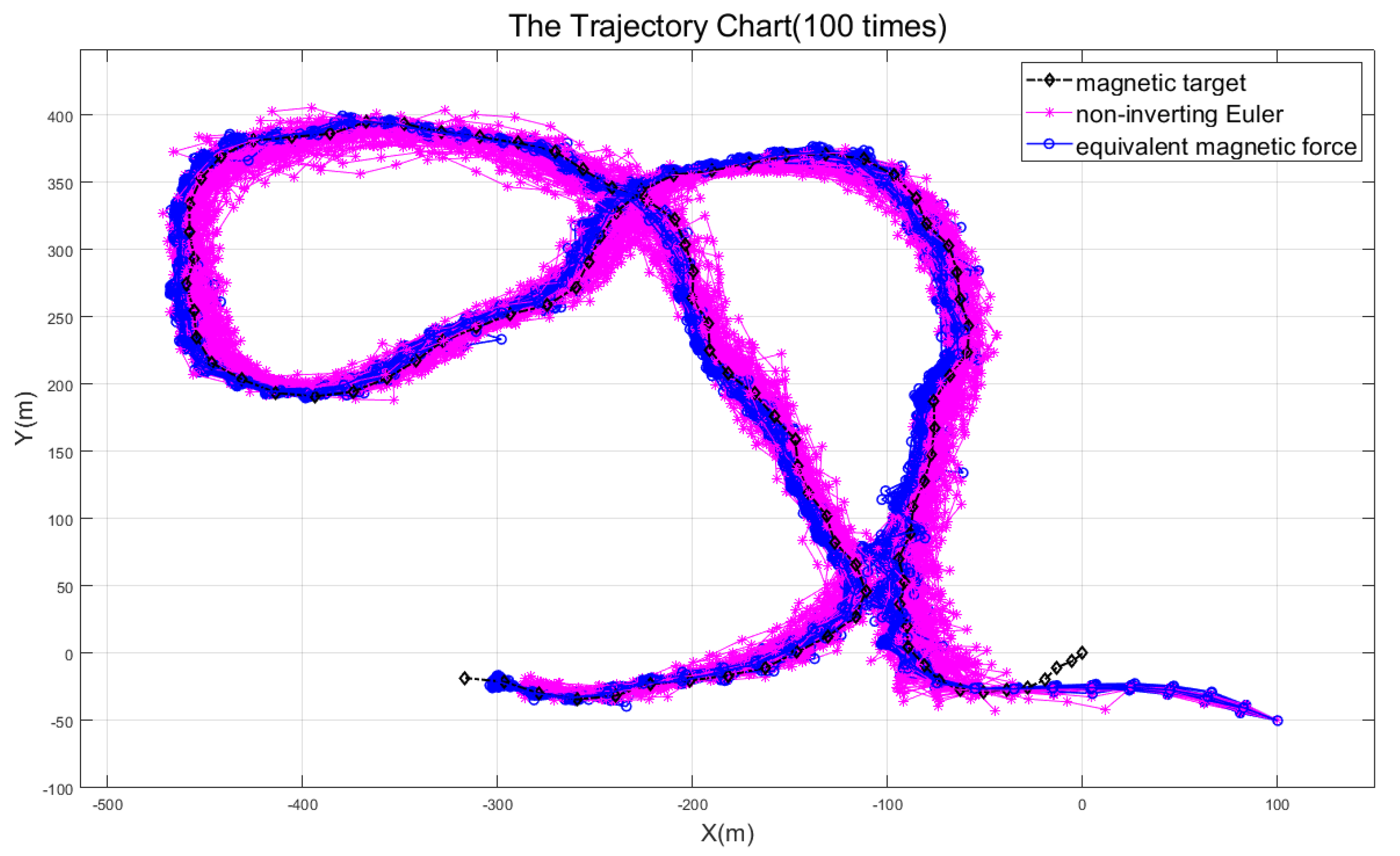
3.1. Motion Tracking Simulation
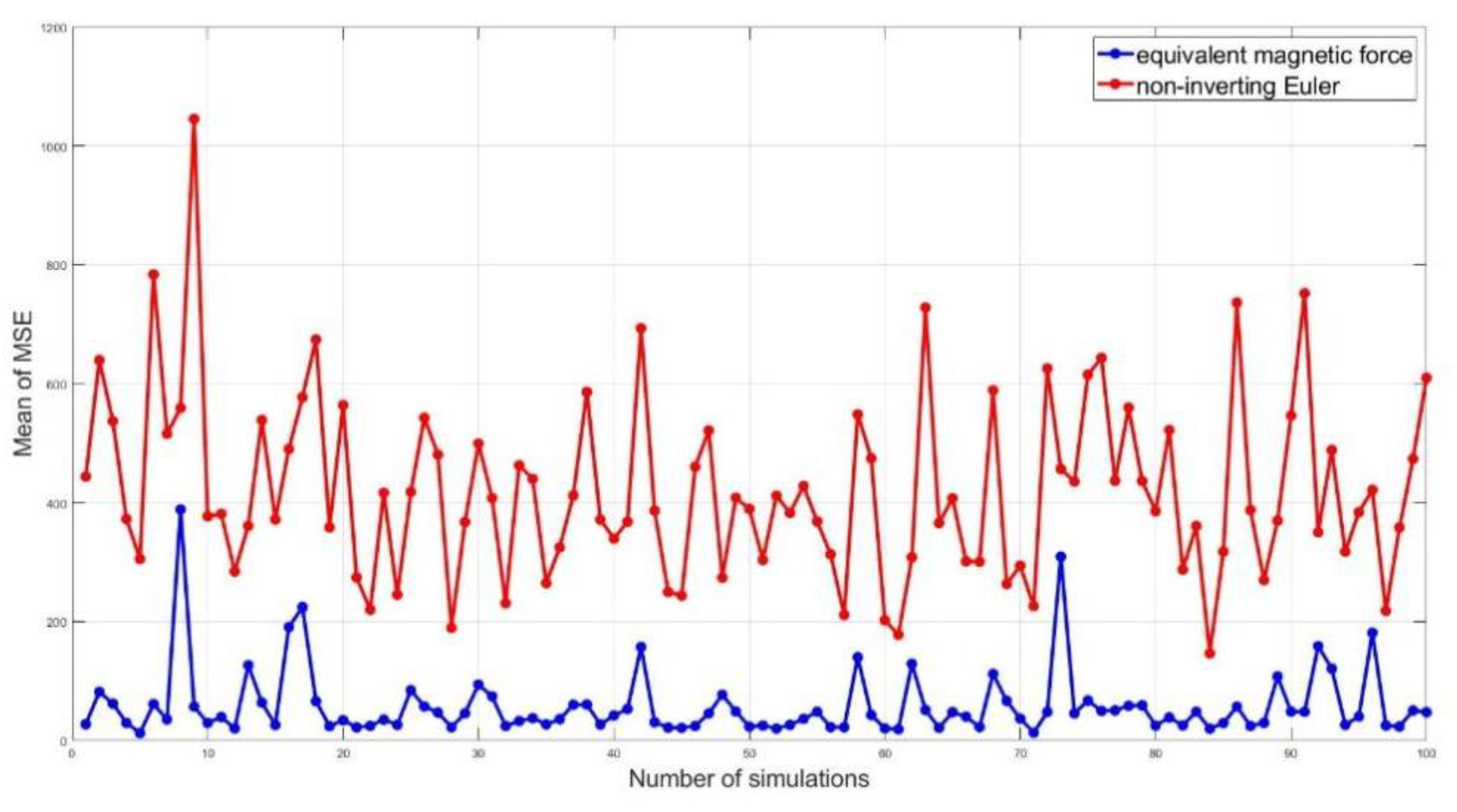
3.2. Robustness Analysis
3.2.1. Comparative Analysis of Noise Interference
3.2.2. Analysis of Multi-Source Coupling Interference
4. Discussion and Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hou, Z. Magnetometer and related standards development application situation. Stand. Sci. 2011, 11, 52–55. [Google Scholar]
- Gallimore, E.; Terrill, E.; Pietruszka, A.; Gee, J.; Nager, A.; Hess, R. Magnetic Survey and Autonomous Target Reacquisition with a Scalar Magnetometer on a Small AUV. J. Field Robot. 2020, 37, 1246–1266. [Google Scholar] [CrossRef]
- Keenan, S.T.; Clark, D.A.; Leslie, K.E. Method for Full Magnetic Gradient Tensor Detection from a Single HTS Gradiometer. Supercond. Sci. Technol. 2022, 35, 045005. [Google Scholar] [CrossRef]
- Lenz, J.E. A Review of Magnetic Sensors. Proc. IEEE 1990, 78, 973–989. [Google Scholar] [CrossRef]
- Bichurin, M.I.; Petrov, V.M.; Petrov, R.V.; Tatarenko, A.S.; Grosz, A. High Sensitivity Magnetometers, Smart Sensors, Measurement and Instrumentation; Springer International Publishing: Cham, Switzerland, 2016; pp. 127–166. [Google Scholar]
- Stolz, R.; Schmelz, M.; Zakosarenko, V.; Foley, C.P.; Tanabe, K.; Xie, X.; Fagaly, R. Superconducting Sensors and Methods in Geophysical Applications. Supercond. Sci. Technol. 2021, 34, 033001. [Google Scholar] [CrossRef]
- Khan, M.A.; Sun, J.; Li, B.; Przybysz, A.; Kosel, J. Magnetic Sensors-A Review and Recent Technologies. Eng. Res. Express 2021, 3, 022005. [Google Scholar] [CrossRef]
- Liu, H.; Dong, H.; Ge, J.; Liu, Z. An Overview of Sensing Platform-Technological Aspects for Vector Magnetic Measurement: A Case Study of the Application in Different Scenarios. Measurement 2022, 187, 110352. [Google Scholar] [CrossRef]
- Lenz, J.; Edelstein, S. Magnetic Sensors and Their Applications. IEEE Sens. J. 2006, 6, 631–649. [Google Scholar] [CrossRef]
- Schmidt, P.W.; Clark, D.A. The Magnetic Gradient Tensor: Its Properties and Uses in Source Characterization. Lead. Edge 2006, 25, 75–78. [Google Scholar] [CrossRef] [Green Version]
- Rudd, J.; Chubak, G.; Larnier, H.; Stolz, R.; Schiffler, M.; Zakosarenko, V.; Schneider, M.; Schulz, M.; Meyer, M. Commercial Operation of a SQUID-Based Airborne Magnetic Gradiometer. Lead. Edge 2022, 41, 486–492. [Google Scholar] [CrossRef]
- Yu, Y.; Dan, Z. Route Planning Modeling and Simulation Research for Antisubmarine Cloverleaf Pattern Search of Magnetic Anomaly Detector. Ship Electron. Eng. 2017, 37, 88–92. [Google Scholar]
- Tang, J.; Hu, S.; Ren, Z.; Chen, C. Localization of Multiple Underwater Objects With Gravity Field and Gravity Gradient Tensor. IEEE Geosci. Remote Sens. Lett. 2018, 15, 247–251. [Google Scholar] [CrossRef]
- Lin, P.; Zhang, N.; Lin, C.; Chang, M.; Xu, L. Two-Point Magnetic Field Positioning Algorithm Based on Rotating Magnetic Dipole. Measurement 2021, 174, 109059. [Google Scholar] [CrossRef]
- Nara, T.; Suzuki, S.; Ando, S. A Closed-Form Formula for Magnetic Dipole Localization by Measurement of Its Magnetic Field and Spatial Gradients. IEEE Trans. Magn. 2006, 42, 3291–3293. [Google Scholar] [CrossRef]
- Page, B.R.; Lambert, R.; Mahmoudian, N.; Newby, D.H.; Foley, E.L.; Kornack, T.W. Compact Quantum Magnetometer System on an Agile Underwater Glider. Sensors 2021, 21, 1092. [Google Scholar] [CrossRef] [PubMed]
- Yao, Y. Research on Methods of Answer Searching Submarine; Publishing House of Electronics Industry: Beijing, China, 2017; pp. 393–396. [Google Scholar]
- Han, Q.; Li, L.; Lv, X.; Hao, D. Application of SAS Algorithm in Responsive Submarine-Searching Path Planning. J. Phys. Conf. Ser. 2021, 2083, 032038. [Google Scholar] [CrossRef]
- Fang, W.; Yang, R.; Zhou, X.; Gao, Q. Study on the Answer Submarine Search Efficiency of Aerial Magnetic Detection. J. Test Meas. Technol. 2008, 22, 114–117. [Google Scholar]
- Zhang, Y.; Wang, G. Latent Efficiency Model of Anti-Submarine Patrol Plane Using Magnetic Finder. Ordnance Ind. Autom. 2018, 12, 12. [Google Scholar]
- Ding, W.; Cao, H.; Guo, H.; Ma, Y.; Mao, Z. Investigation on Optimal Path for Submarine Search by an Unmanned Underwater Vehicle. Comput. Electr. Eng. 2019, 79, 106468. [Google Scholar] [CrossRef]
- Xiang, Q.; He, X. Research on Submarine Searching Method of Unmanned Marine Vehicle with Magnetic Anomaly Detector. J. Ordnance Equip. Eng. 2019, 40, 16–19. [Google Scholar] [CrossRef]
- Zhu, Z.; Lei, Y.; Zhu, Y. Simulation of Helicopter Anti-Submarine Route Planning. J. Syst. Simul. 2019, 31, 1280. [Google Scholar]
- Reid, A.B. Euler Deconvolution: Past, Present, and Future-a Review. In SEG Technical Program Expanded Abstracts 1995; Society of Exploration Geophysicists: Tulsa, OK, USA, 1995; pp. 272–273. [Google Scholar]
- Nara, T.; Ito, W. Moore–Penrose Generalized Inverse of the Gradient Tensor in Euler’s Equation for Locating a Magnetic Dipole. J. Appl. Phys. 2014, 115, 17E504. [Google Scholar] [CrossRef]
- Hansen, R.O.; Suciu, L. Multiple-Source Euler Deconvolution. Geophysics 2002, 67, 525–535. [Google Scholar] [CrossRef]
- Yin, G.; Zhang, L.; Jiang, H.; Wei, Z.; Xie, Y. A Closed-Form Formula for Magnetic Dipole Localization by Measurement of Its Magnetic Field Vector and Magnetic Gradient Tensor. J. Magn. Magn. Mater. 2020, 499, 166274. [Google Scholar] [CrossRef]
- Zhang, Y.; Mao, S. Modeling Analysis and Application of Submarine Space Magnetic Field. Ship Electron. Eng. 2018, 38, 136–139. [Google Scholar]
- Jackson, J.D. Classical Electrodynamics. Am. J. Phys. 1999, 67, 841. [Google Scholar] [CrossRef]
- Diaz-Aguiló, M.; Mateos, I.; Ramos-Castro, J.; Lobo, A.; García-Berro, E. Design of the Magnetic Diagnostics Unit Onboard LISA Pathfinder. Aerosp. Sci. Technol. 2013, 26, 53–59. [Google Scholar] [CrossRef] [Green Version]
- Bradley, J. Nelson Calculation of the Magnetic Gradient Tensor from Total Field Gradient Measurements and Its Application to Geophysical Interpretation. Geophysics 1988, 53, 957–966. [Google Scholar] [CrossRef]
- Wynn, W.; Frahm, C.; Carroll, P.; Clark, R.; Wellhoner, J.; Wynn, M. Advanced Superconducting Gradiometer/Magnetometer Arrays and a Novel Signal Processing Technique. IEEE Trans. Magn. 1975, 11, 701–707. [Google Scholar] [CrossRef]
- Simmonds, J.G. A Brief on Tensor Analysis; Springer: New York, NY, USA, 1994. [Google Scholar]
- Zhang, X.-D. Matrix Analysis and Applications, 1st ed.; Cambridge University Press: Cambridge, UK, 2017; ISBN 978-1-108-41741-9. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Fu, Q.; Sui, Y. A Robust Tracking Method for Multiple Moving Targets Based on Equivalent Magnetic Force. Micromachines 2022, 13, 2018. https://doi.org/10.3390/mi13112018
Wang Y, Fu Q, Sui Y. A Robust Tracking Method for Multiple Moving Targets Based on Equivalent Magnetic Force. Micromachines. 2022; 13(11):2018. https://doi.org/10.3390/mi13112018
Chicago/Turabian StyleWang, Ying, Qiang Fu, and Yangyi Sui. 2022. "A Robust Tracking Method for Multiple Moving Targets Based on Equivalent Magnetic Force" Micromachines 13, no. 11: 2018. https://doi.org/10.3390/mi13112018