1. Introduction
Pests and diseases substantially affect agricultural production; they are estimated to cause approximately 16% of losses in agriculture yield worldwide [
1]. With the popularization of concepts such as green development and healthy living, biological pest control through natural enemies has become an important part of sustainable crop production [
2]. Trichogramma is a small wasp that parasitises pest eggs and is commonly used for the biological control of these pests [
3,
4]. Existing Trichogramma delivery methods include manual delivery, mechanical delivery and drone delivery. Manual delivery is inefficient and labour-intensive, and mechanical delivery methods are fuel-intensive and thus expensive and polluting [
5,
6]. Multi-rotor plant protection drones have the advantages of simple operation, low operating costs, increased crop yields and improved operational efficiency, which is of great significance in biological control [
7,
8,
9]. The delivery of Trichogramma by multirotor drones is a mainstream idea in pest control; however, a better understanding of the feasibility and accuracy of these system is urgently required.
With the application and promotion of agricultural aviation technology, the use of unmanned aerial vehicles (UAVs) equipped with delivery device can effectively replace manual operation. Numerous experiments regarding Trichogramma delivery with various devices and UAVs have been performed. Tween et al. use fixed-wing aircraft to release insects by natural gravity and suction, avoiding contact with the delivery device and thereby reducing damage to insects. In contrast, the improved delivery system resulted in a more even distribution of insects and a higher survival rate. Because the fixed wing can only fly in a fixed route, it is not flexible and difficult to operate, so it is not suitable for small-area operation [
10,
11]. Xu et al. [
12] designed a Trichogramma delivery system based on the Hex-Rotor, which realized the autonomous delivery function of Trichogramma. However, the influence of the wind flow generated by the rotor on the delivery system is not taken into account, which affects the accuracy of the landing point. Wang et al. [
13] designed a delivery device for the harlequin ladybird; however, their device was greatly affected by wind speed and thus also had poor accuracy. Pezzi et al. [
14] proposed a backpack wind-borne natural enemy release device primarily comprising a fan, an electromagnet and an air diffuser; wind power was used to achieve the release task. The results indicated that the release mechanism could damage natural enemies and thus must be carefully designed to ensure their survival. Drukker et al. [
15] designed a system for dropping insects using aircraft and tested it in the laboratory and in the field. By observing the escape situation, mortality and reproduction rate of insects after release, it is indicated that the system can be used to release insects. The system was evaluated by the efficiency of container opening, the dispersion of containers in the field, and the probability of containers staying in the field, demonstrating the feasibility of aerial release of the delivery system. Pickett et al. [
16] used a fixed-wing aircraft as a flight vehicle to release natural enemies with a mechanical device, which caused disadvantages such as poor uniformity and low coverage due to direct contact between the mechanical device and insects. Zhang et al. [
17] used the Box-Behnken design (BBD) method to evaluate and optimize the performance of the seed arrangement device. The method could accurately verify the device performance and thus could be used to evaluate Trichogramma delivery systems.
On the basis of the aforementioned research, a Trichogramma delivery system was designed and optimized in this paper. In the BBD tests, the launch height, launch velocity and launch interval were used as the test factors, and the accuracy of the Trichogramma pill landing point was used as the test index. First of all, the data were analyzed by ANOVA using Design-Expert software, and the influence rule of each experimental factor on the dropping accuracy of Trichogramma pills was explored by response surface analysis, and a regression model between experimental factors and experimental indicators was established. Parameters were optimized on the basis of the response surface method, and the best combination of parameters was obtained. Finally, the feasibility of the Trichogramma delivery system was verified by the experiment, and the accuracy of the Trichogramma pill delivery system was improved. The use of drone delivery has improved the efficiency and reduced the cost of the biological control.
2. Overall System Structure and Working Principle
2.1. Overall Structure
The designed launcher composed a rotary table, a steering gear, a transmitter tube and a motor. Rubber wheel extrusion were used to launch the Trichogramma pills, which effectively avoids the blockage due to friction with mechanical parts. The overall diagram of the Trichogramma delivery system is presented in
Figure 1.
2.2. Working Principle
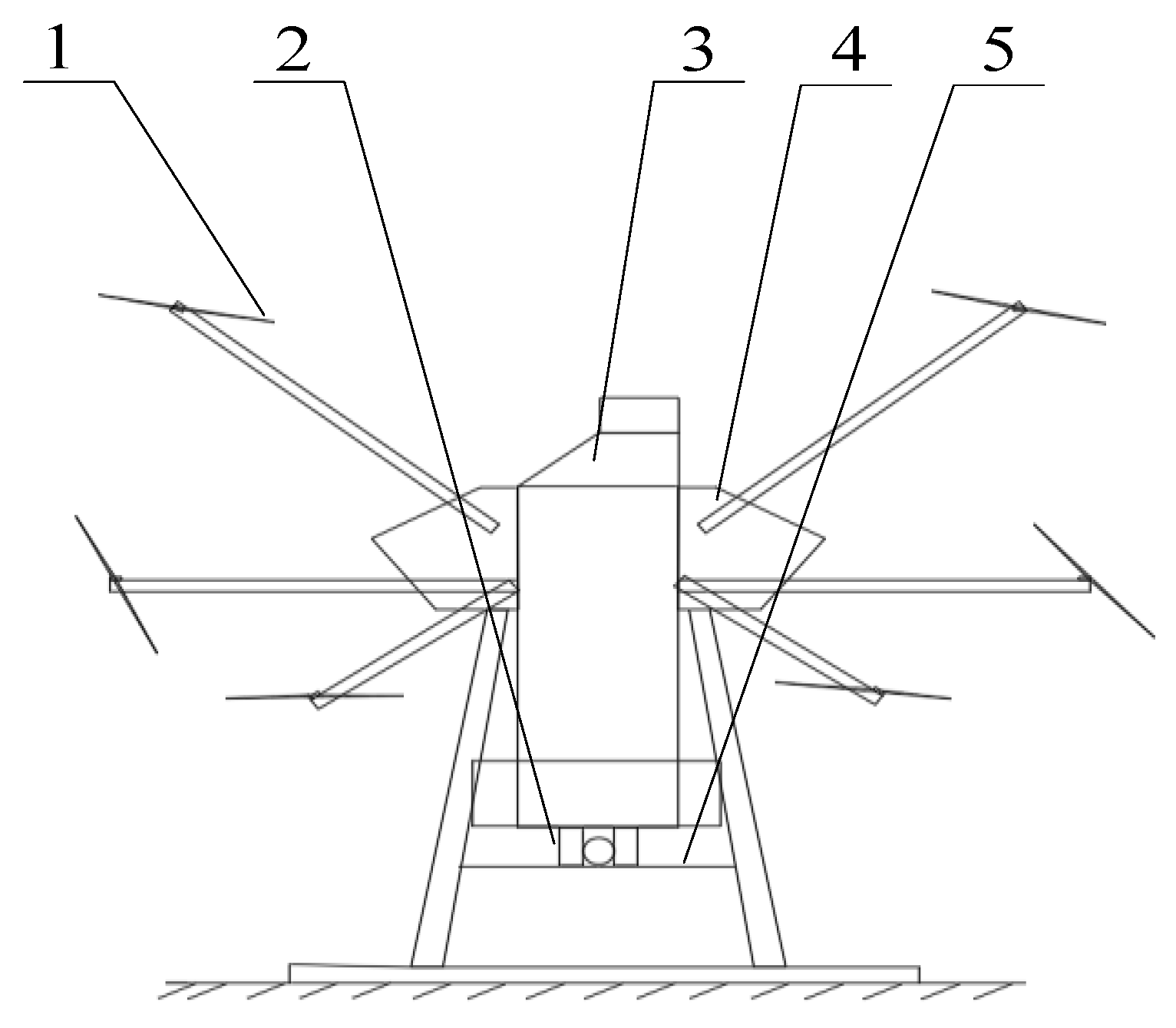
The launcher is the core part of the delivery system, and its performance directly affects the operational quality and control effect of Trichogramma. The launcher structure is presented in
Figure 2. The function of the diversion device is to facilitate the falling of the Trichogramma pills, the function of the cross turntable is to move the Trichogramma pill, the role of the steering gear is to drive the cross turntable, the role of the motor is to drive the friction wheel, and the role of the fixed plate is to fix the launch tube and the motor. The traditional launchers mostly use a push rod or dial to launch the Trichogramma pills; however, this method is prone to blockage and susceptible to environmental conditions. To achieve delivery, the Trichogramma pills were first loaded into the delivery box, and the UAV flight plan was determined by setting its speed; the flight height and other parameters were set through the cloud platform. When the UAV arrives at the designated delivery point, the UAV monitoring and data forwarding software in the onboard 5G board sends the delivery instruction to a pulse-width modulation (PWM) signal converter, and sends the signal to the steering gear. The steering gear drives the rotary table to release the Trichogramma pills, and the Trichogramma pills fall into the launcher under the action of gravity. Finally, the Trichogramma pills are launched by the friction wheel at high speed, and the launching speed of the launcher is adjusted in real time in accordance with the trajectory of the Trichogramma pills to realize the adaptive control and accurate launching.
3. Materials and Methods
3.1. Test Materials and Equipment
Commercial Trichogramma pills (approximately 3.4 g each with, diameter of 25 mm) were used. The test equipment adopts the six-rotor plant protection UAV provided by Shandong Folet UAV Manufacturing Co., LTD as the platform, as presented in
Figure 3. The UAV model is ZB30L-6, the maximum takeoff weight of 21_kg, the capacity of the delivery box of 10_L, the flight speed of 1–8 m/s, and the effective flight height is of 2–8 m. In order to avoid the influence of weather and other experimental conditions on the experiment, the test is conducted under the conditions of sunny weather, 30 °C temperature, and no wind.
3.2. Test Factors and Indicators
3.2.1. The Test Factors
According to previous studies on the Trichogramma delivery system, the launch speed, launch height, and launch interval have a great impact on system performance. Therefore, launch speed, launch height, and launch interval are selected as test factors. The launching speed refers to the speed when the Trichogramma pills leave the delivery system, the launching height refers to the height of the Trichogramma pills from the ground, and the launching interval refers to the delivery time between every two Trichogramma pills. In order to test the performance of the system conveniently and accurately, the corresponding experimental factors were selected according to the research results of previous scholars, combined with the existing test conditions.
(1) Launch height: Downwash airflow will be generated during multirotor UAV operation, and the generated wind field affects the trajectory of released Trichogramma pills. The distribution of this wind field varies with heights [
18,
19]. Hence, the performance of the Trichogramma delivery system was tested at 100, 130, and 170 cm.
(2) Launch speed: According to the literature [
20], launch speed affects displacement distance, so launch speed also has an important influence on the accurate delivery of Trichogramma. The selected launch velocities were 4.0157, 3.8592, and 3.7696 m/s.
(3) Launch interval: According to the research results and test conditions in literature [
21], the stability and reliability of the system was tested for launch intervals of 2, 3, and 4 s.
3.2.2. Test Index
No standards for evaluating the performance evaluation of the Trichogramma delivery systems exist. In this paper, the delivery system was evaluated in terms of its landing accuracy. It is based on the distance of the drop point and the effective flight distance of Trichogramma, and the actual dropping distance is measured. Draw a theoretical circle with the landing site as the center and the theoretical proportional distance as the radius. Finally, the number of Trichogramma pills within the theoretical range was counted and the accuracy of the landing point was calculated. The calculation formula of the landing accuracy is:
where
a is the number of Trichogramma pills within the circle, and
b is the total number of Trichogramma pills released.
3.3. Experimental Design
The three-factor three-level BBD test method was adopted, and the launch height, launch velocity and launch interval were selected as the test factors. The accuracy of the landing point was taken as the test index. The test factor levels are presented in
Table 1.
4. Results and Analysis
4.1. Test Results
Design-Expert data analysis software was used to process and analyze the test results, and regression analysis and response surface analysis were used to analyze the significant interaction effect between the test factors. [
22,
23,
24] The experimental design and results are presented in
Table 2;
A,
B, and
C represent the launch height, launch velocity, and launch interval, respectively, and
R represents the accuracy of the landing point.
4.2. Regression Model Establishment and Result Analysis
The data in
Table 2 was analyzed using analysis of variance (ANOVA) [
25,
26,
27] with Design-Expert software; the results are displayed in
Table 3. A quadratic response surface regression model of the landing point accuracy
R on three independent variables: launch height
A, launch velocity
B, and launch interval
C was established. The regression equation was as follows:
To further determine the fitting accuracy of the model and the primary and secondary order of the influence of each factor on the accuracy of the landing point, the analysis of variance and ternary quadratic regression analysis on the accuracy of
Table 3 show that there is no significant difference in the regression model. The model correlation coefficient and modified correlation coefficient
S2 and
S2adj were 83.77% and 62.89%, respectively. It shows that the model has a good fit and can be used to analyze and predict the accuracy rate of Trichogramma pills. According to the absolute values of the coefficient of the model, launch height
A had the greatest effect on deployment accuracy, followed by launch interval
C and launch velocity
B. Launching speed and launching height have a significant influence on the accuracy of the landing, and they have significant interaction. The response surfaces and contours of each factor to the accuracy of the landing point are displayed in
Figure 4,
Figure 5 and
Figure 6. According to
Figure 4, if the launching speed is fixed, the accuracy of the landing point increases first and then decreases with the increase in the launching height, while the increase in the launching speed has little change in the accuracy of the landing point. As can be observed from
Figure 5, the interaction response surface of various factors shows that when the launching speed is fixed, the accuracy of the landing point increases first and then decreases with the increase in the launching interval and the launching height, and the range of change is large. The opening of the response surface is downward and presents a convex shape, indicating that the interaction between the emission interval and the emission height has a significant influence on the response value. As illustrated in
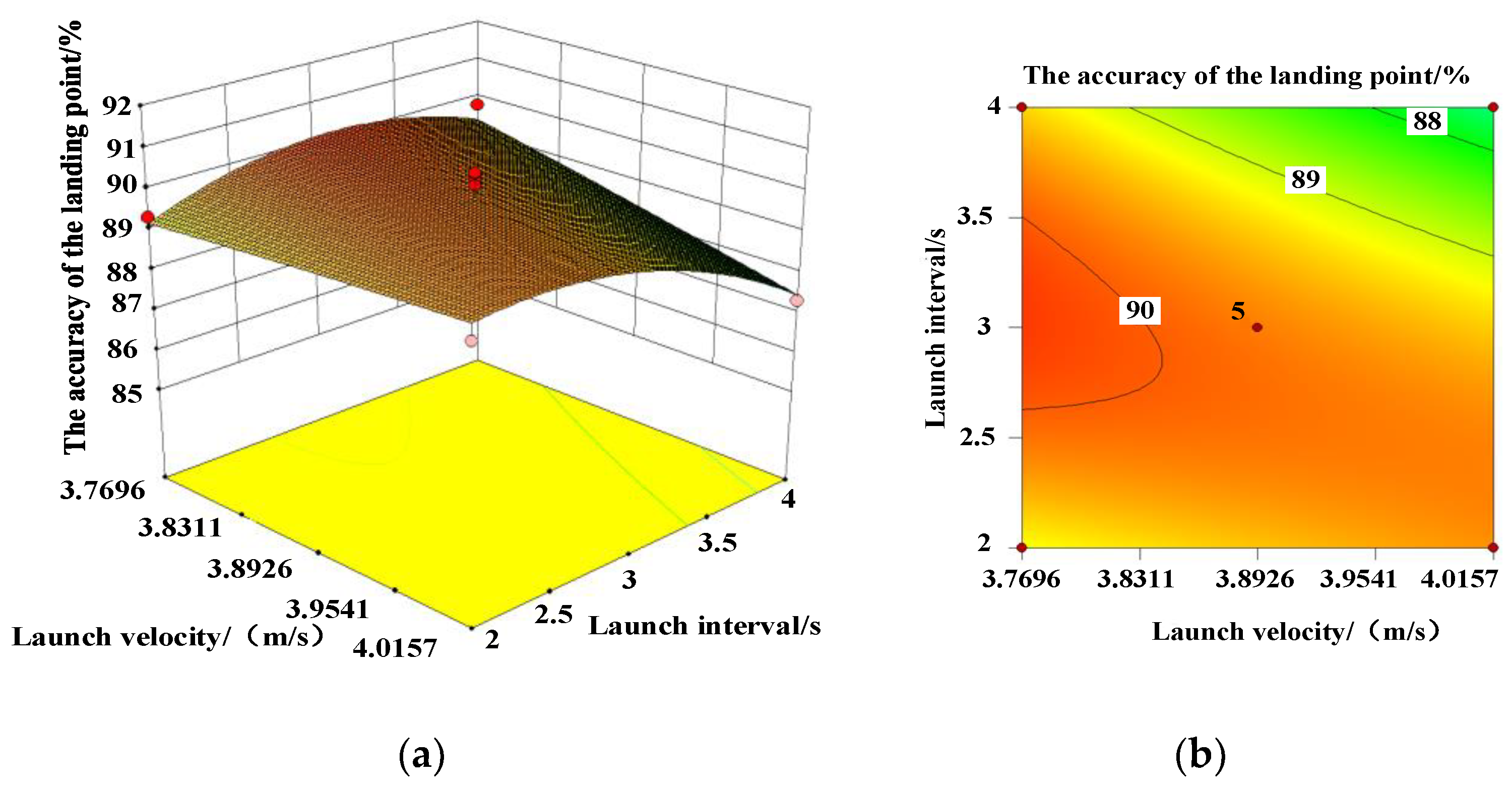
Figure 6, when the launching height is fixed, the accuracy of the landing point increases first and then gradually decreases with the increase in the launching interval. With the increase in the launch speed, the accuracy of the landing remains stable. The response surface was flat, indicating that the interaction of the two factors has no significant effect on the accuracy of the landing point.
4.3. Parameter Optimization and Experimental Verification
The ANOVA revealed that the launch height
A had the greatest effect on the accuracy, followed by launch interval
C and launch velocity
B. The optimization module in Design-expert software was used to establish a mathematical model for parameter optimization, as follows:
The optimal parameter combination obtained from the module is as follows: launch height of 147.95 cm, launch speed of 3.7745 m/s, and launch interval of 2.98 s.
To verify the accuracy of the model prediction, input the data of the optimal parameter combination into the delivery system. Three drop tests were conducted on the south lawn of the library of Shandong University of Technology, and the test values of the landing accuracy of each drop were recorded and calculated. Finally, the relative error of the landing accuracy is obtained by comparing with the optimized value. In order to avoid the impact of environmental factors on the test, the test was carried out in clear weather at 30 °C with no wind. The UAV was fixed on the bench device (
Figure 7).
The parameters of the delivery system were set as follows: launch height of 147.95 cm, launch speed of 3.7745 m/s, and launch interval of 2.98 s. The obtained field verification test results are presented in
Table 4. The test results demonstrate that the errors between the test value and the optimal value are 1.50%, 1.61% and 2.03%, respectively. The average relative error between the test value and the optimization result is 1.71%. It shows that the optimal value of the regression equation of each index is close to the test value, and each index can reach better values under the optimal test combination condition.
5. Discussion
With the popularization and application of aviation technology in agriculture, the use of unmanned aerial vehicle (UAV) for biological control has become more and more popular, and the problem of traditional manual delivery of insects can be effectively solved by UAV. As the launching device carried by the UAV is still in the test stage, the traditional device is prone to blockage, missed delivery and other phenomena. In turn, the system efficiency and delivery accuracy become worse, and the goal of accurate delivery cannot be achieved. In this study, the blocking problem was effectively solved by using the extrusion launcher, and the optimal parameter combination of the delivery system was calculated by the BBD experimental design method, which verified the feasibility of the Trichogramma delivery system, greatly reduced the cost of the biological control and improved the accuracy of the Trichogramma pill delivery system.
6. Conclusions
Design-Expert data processing software and BBD were adopted, and the effects of three factors—launch height (A), launch speed (B), and launch interval (C)—on the accuracy R of Trichogramma pills’ deployment were analyzed, and a regression equation with the landing accuracy R as the response index was established. An optimization analysis revealed that launch height had the greatest effect on the accuracy, followed by launch interval and launch velocity. The obtained optimal parameter combination was a launch height of 147.95 cm, launch speed of 3.7745 m/s, launch interval of 2.98 s, and the landing accuracy R is 93.29%. The test results demonstrate that when the launch height is 147.95 cm, the launch speed is 3.7745 m/s, and the launch interval is 2.98 s, and the landing accuracy R is 93.43%, 93.14%, and 93.48%, respectively. The average relative error between the test value and the optimization result is 1.71; thus, the regression model is reliable and can be used for the precise delivery of Trichogramma pills. In the future work, we will consider the influence of UAV wind field on the delivery performance, and consider using the adaptive controller to control the delivery trajectory of Trichogramma pills, to further improve the accuracy of the delivery system.
Author Contributions
Conceptualization and methodology, J.G.; Investigation, Y.Z.; Writing—original draft preparation, S.J.; Technical Support, K.C.; Grammar corrections, K.M. All authors have read and agreed to the published version of the manuscript.
Funding
The Shandong Provincial Natural Science Foundation of China [ZR202102210303]. The Key R&D Program of Shandong Province (Major Scientific and Technological Innovation Project) [2020CXGC010804]. The Zibo Key R&D Plan (School-City Integration) Ecological Unmanned Farm Research Institute Project [2019ZBXC200].
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Acknowledgments
The work is supported by the Shandong Provincial Natural Science Foundation of China (Grant No. ZR202102210303), and the Key R&D Program of Shandong Province (Major Scientific and Technological Innovation Project) (Grant No. 2020CXGC010804), and the Zibo Key R&D Plan (School-City Integration) Ecological Unmanned Farm Research Institute Project (Grant No.2019ZBXC200).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bzowska-Bakalarz, M.; Bulak, P.; Bereś, P.K.; Czarnigowska, A.; Czarnigowski, J.; Karamon, B.; Pniak, M.; Bieganowski, A. Using gyroplane for application of Trichogramma spp. against the European corn borer in maize. Pest Manag. Sci. 2020, 76, 2243–2250. [Google Scholar] [CrossRef]
- Perez-Alvarez, R.; Nault, B.A.; Poveda, K. Effectiveness of augmentative biological control depends on landscape context. Sci. Rep. 2019, 9, 8664. [Google Scholar] [CrossRef] [Green Version]
- Kairo, G.; Biron, D.G.; Ben Abdelkader, F.; Bonnet, M.; Tchamitchian, S.; Cousin, M.; Dussaubat, C.; Benoit, B.; Kretzschmar, A.; Belzunces, L.P.; et al. Nosema ceranae, Fipronil and their combination compromise honey bee reproduction via changes in male physiology. Sci. Rep. 2017, 7, 8556. [Google Scholar] [CrossRef] [Green Version]
- Kerima, O.Z.; Niranjana, P.; Kumar, B.V.; Ramachandrappa, R.; Puttappa, S.; Lalitha, Y.; Jalali, S.K.; Ballal, C.R.; Thulasiram, H.V. De novo transcriptome analysis of the egg parasitoid Trichogramma chilonis Ishii (Hymenoptera: Trichogrammatidae): A biological control agent. Gene Rep. 2018, 13, 115–129. [Google Scholar] [CrossRef]
- Watros, A.; Lipińska, H.; Lipiński, W.; Tkaczyk, P.; Krzyszczak, J.; Baranowski, P.; Brodowska, M.S.; Jackowska, I. The relationship between mineral nitrogen content and soil ph in grassland and fodder crop soils. Appl. Ecol. Environ. Res. 2018, 17, 107–121. [Google Scholar] [CrossRef]
- Liling, C.H.E.N.; Zheng, X.U.E.; Hongyu, B.A.I.; Yuexing, L.Ü.; Xin, L.U. Current Situation and Prospect of Biological Control of Corn Borer in Jilin Province. Chin. J. Biol. Control. 2015, 31, 561–567. [Google Scholar]
- Subramaniam, R.; Hajjaj, S.S.H.; Gsangaya, K.R.; Sultan, M.T.H.; Mail, M.F.; Hua, L.S. Redesigning dispenser component to enhance performance crop-dusting agriculture drones. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Yang, K.; Zhang, Z.; Cheng, H.; Wu, H.; Guo, Z. Domain centralization and cross-modal reinforcement learning for vision-based robotic manipulation. Int. J. Precis. Agric. Aviat. 2018, 1, 48–55. [Google Scholar] [CrossRef]
- Lan, Y.; Chen, S. Current status and trends of plant protection UAV and its spraying technology in China. Int. J. Precis. Agric. Aviat. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Tween, G.; Rendón, P. Current Advances in the Use of Cryogenics and Aerial Navigation Technologies for Sterile Insect Delivery Systems. Area-Wide Control Insect Pests 2007, 229–238. [Google Scholar] [CrossRef]
- Tan, L.T.; Tan, K.H. Alternative air vehicles for sterile insect technique aerial release. Appl. Entomol. 2013, 137, 126–141. [Google Scholar] [CrossRef]
- Xu, D.; Bai, Y.; Gong, X.; Xu, Z. Design of Trichogramma Delivering System Based on Hex-Rotor UAV. Trans. Chin. Soc. Agric. Mach. 2016, 47, 1–7. [Google Scholar]
- Wang, C.H.; Tong, X.; Ma, J.; Qiu, B.J.; Sun, Z.Z. Design and research of the delivery device for Harlequin ladybird. Agric. Equip. Technol. 2017, 43, 10–13. [Google Scholar]
- Pezzi, F.; Martelli, R.; Lanzoni, A.; Maini, S. Effects of mechanical distribution on survival and reproduction of Phytoseiulus persimilis and Amblyseius swirskii. Biosyst. Eng. 2015, 129, 11–19. [Google Scholar] [CrossRef]
- Drukker, B.; Yaninek, J.S.; Herren, H.R. A packaging and delivery system for aerial release of Phytoseiidae for biological control. Exp. Appl. A Carology 1993, 17, 129–143. [Google Scholar]
- Pickett, C.H.; Gilstrap, F.E.; Morrison, R.K.; Bouse, L.F. Release of Predatory Mites (Acari: Phytoseiidae) by Aircraft for the Biological Control of Spider Mites (Acari: Tetranychidae) Infesting Corn. J. Econ. Entomol. 1987, 80, 906–910. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, C.Y.; Liu, X.G.; Guo, H.; Han, C.J. Performance test and parameter optimization of clamp-type melon precision metering device. J. Chin. Agric. Mech. 2019, 40, 34–40. [Google Scholar] [CrossRef]
- Song, C.; Zhou, Z.; Jiang, R.; Luo, X.; He, X.; Ming, R. Design and parameter optimization of pneumatic rice sowing device for unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2018, 34, 80–88. [Google Scholar]
- HUANG, X.; XU, H.; ZHANG, S.; Li, W.; Luo, C.; Deng, Y. Design and experiment of a device for rapeseed strip aerial seeding. Trans. Chin. Soc. Agric. Eng. 2020, 36, 78–87. [Google Scholar]
- Zhou, K.D.; Wu, X.C.; He, L.; Jiang, Y.Q.; Sun, Q.L.; Zhang, Z.Y. Analysis of Projectile Motion State during Firing Process of the Electric Power Launching System. J. Gun Launch Control. 2014, 35, 1–6. [Google Scholar]
- Zhan, Y.; Chen, S.; Wang, G.; Fu, J.; Lan, Y. Biological control technology and application based on agricultural unmanned aerial vehicle (UAV) intelligent delivery of insect natural enemies (Trichogramma) carrier. Pest Manag. Sci. 2021, 77, 3259–3272. [Google Scholar] [CrossRef]
- Qi, J.; Sun, H.; Jia, H. Optimization and experiment of working parameters of cultivator-ridging-device with curved wing. Trans. Chin. Soc. Agric. Eng. 2021, 37, 79–85. [Google Scholar]
- Lixia, C.; Xiangyou, W.; Yingchao, X. Parameter optimization and experiment of potato sorter based on response surface method. J. Chin. Agric. Mech. 2021, 42, 80–88. [Google Scholar]
- Jin, W.; Bai, S.H.; Zhang, X.J.; Ma, S.T.; Han, Z.P.; Zhang, Y.H.; Zhang, H.T. Parameter Optimization and Test of Pull Stem Roller Oil Sunflower Header. J. Agric. Mech. Res. 2022, 44, 158–162. [Google Scholar]
- Di, Z.F.; Cui, Z.K.; Zhang, H.; Jiang, W.; Zhou, J.; Zheng, Z.H. Design and Experiment of 4YL-4 Self- propelled Corn Grain Harvester. J. Agric. Mech. Res. 2020, 42, 116–121. [Google Scholar]
- Wang, J.N.; Liu, M.J.; Hu, Z.C.; Wei, H.; Xie, H.X. Optimization and experiment on key parameters of dehuller for dried mung beans. Trans. Chin. Soc. Agric. Eng. 2019, 35, 312–318. [Google Scholar]
- Ding, N.; Li, H.T.; Yan, A.; Liu, P.Y.; Han, L.J.; Wei, W.J. Optimization and Experiment on Straw Multi-stage Continuous Cold Roll Forming for Molding Parameters. Trans. Chin. Soc. Agric. Mach. 2021, 52, 196–202+290. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}