
A Fully Integrated Low-Dropout Regulator with Improved Load Regulation and Transient Responses

 , ,
, ,
Abstract
:1. Introduction
2. Proposed LDO Regulator
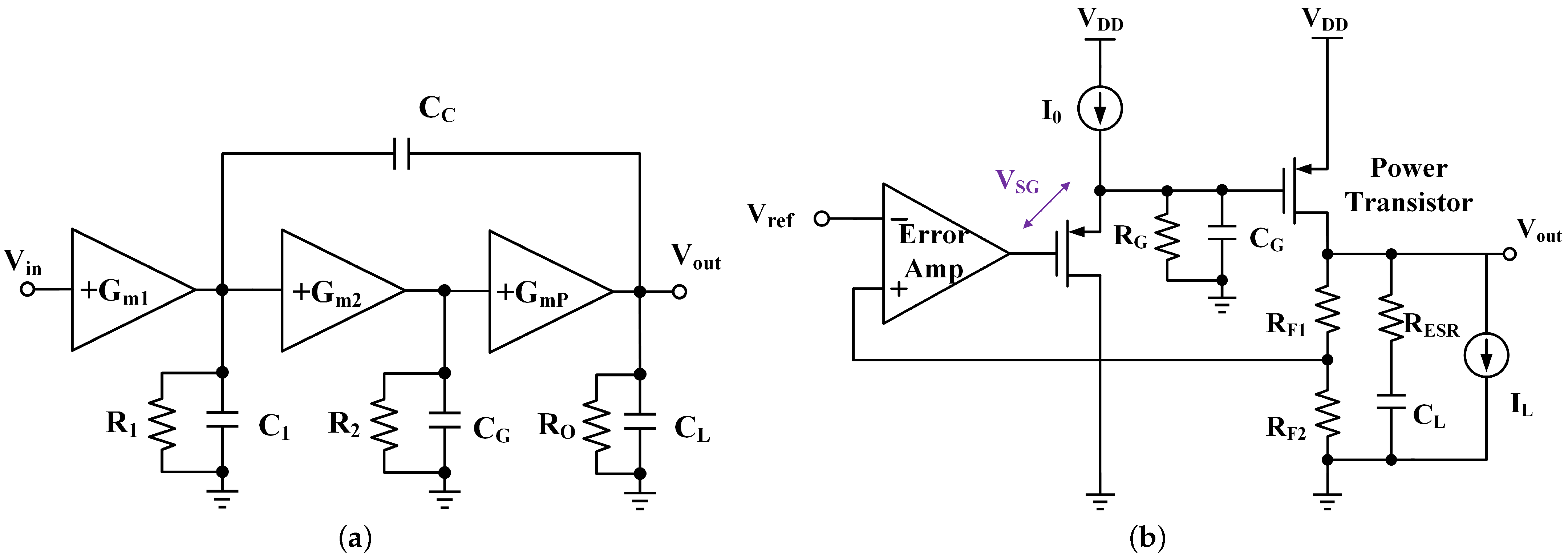
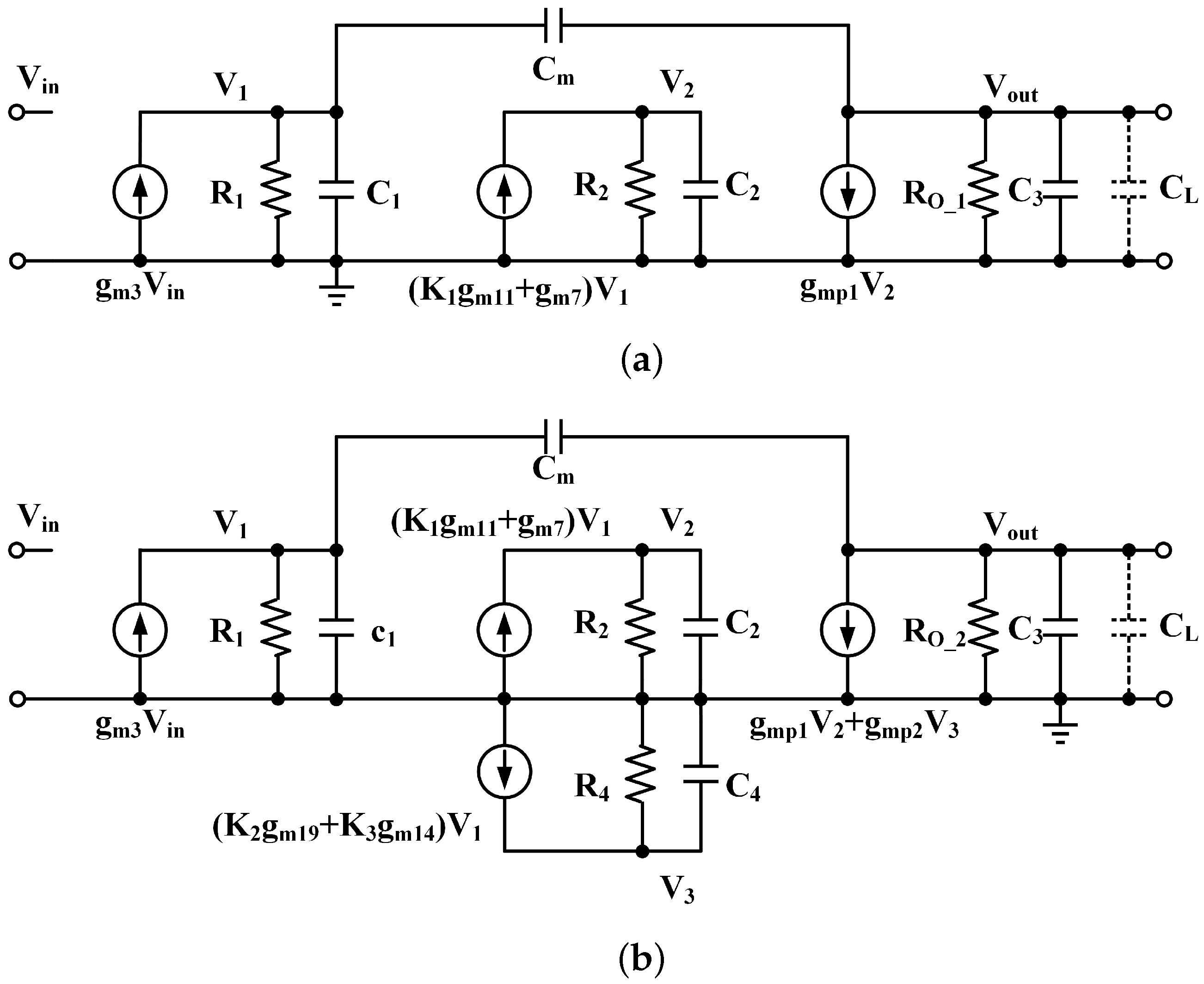
2.1. Conventional Three-Stage LDO Regulators
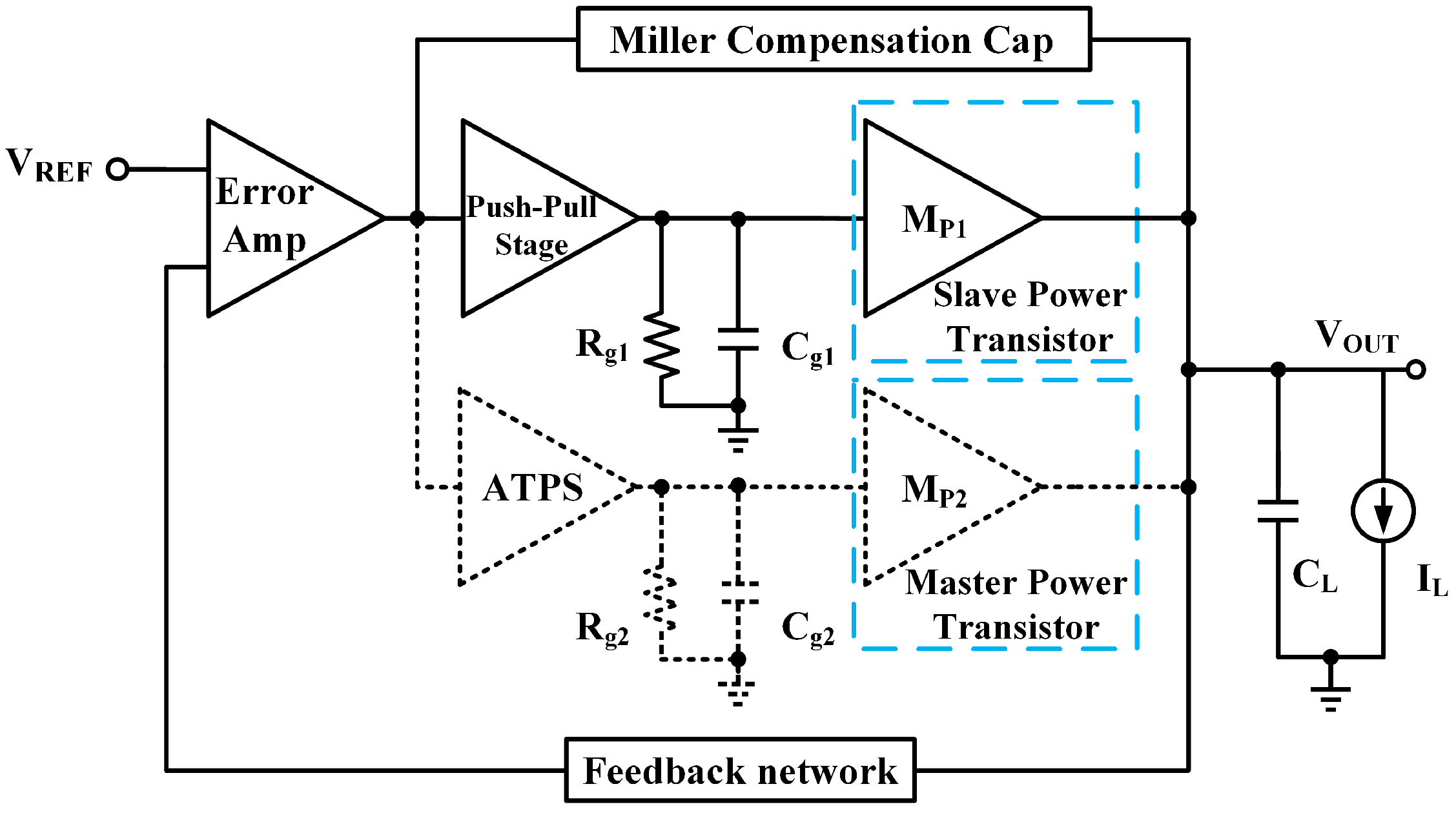
2.2. Proposed ATPS
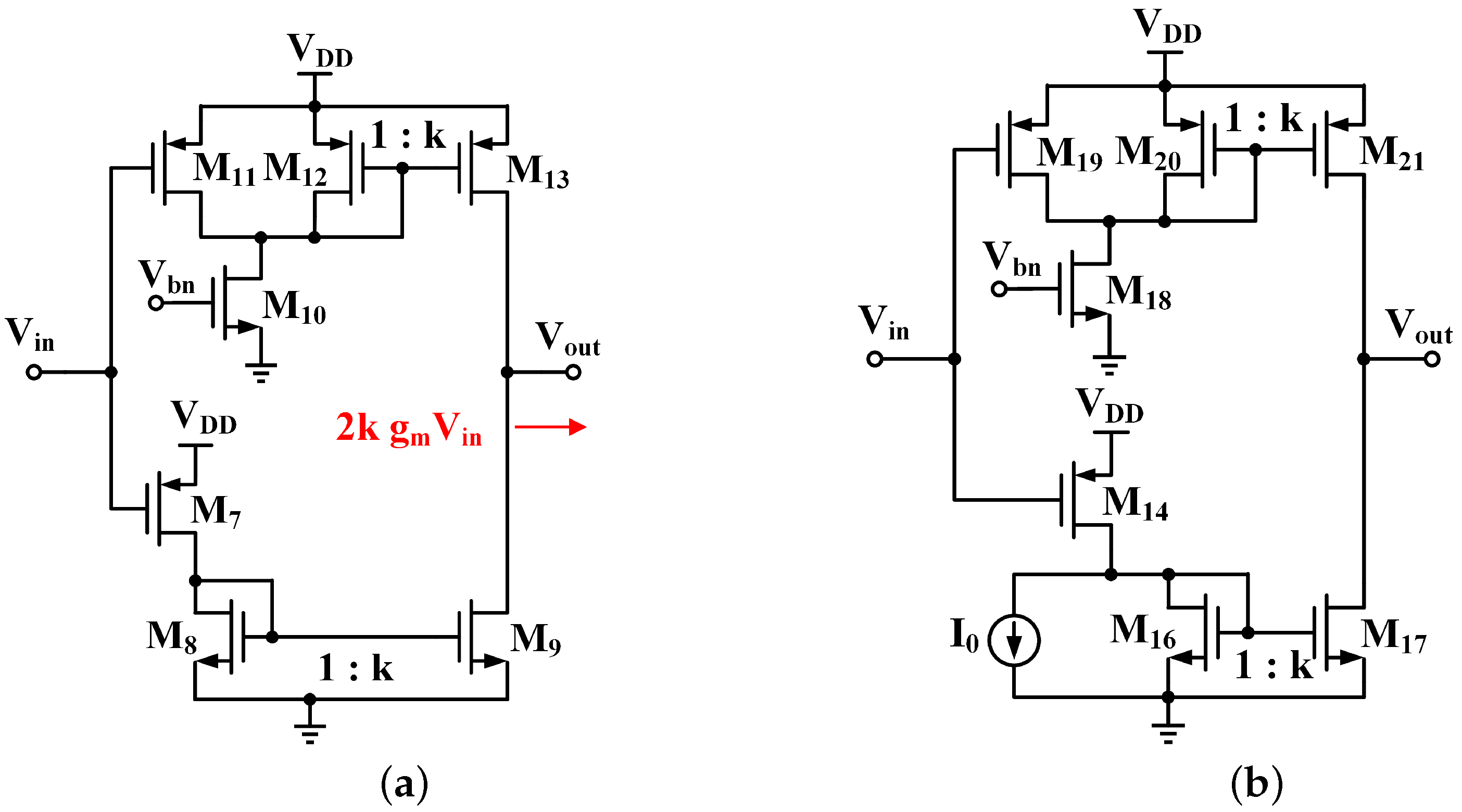
2.3. Circuit Implementation
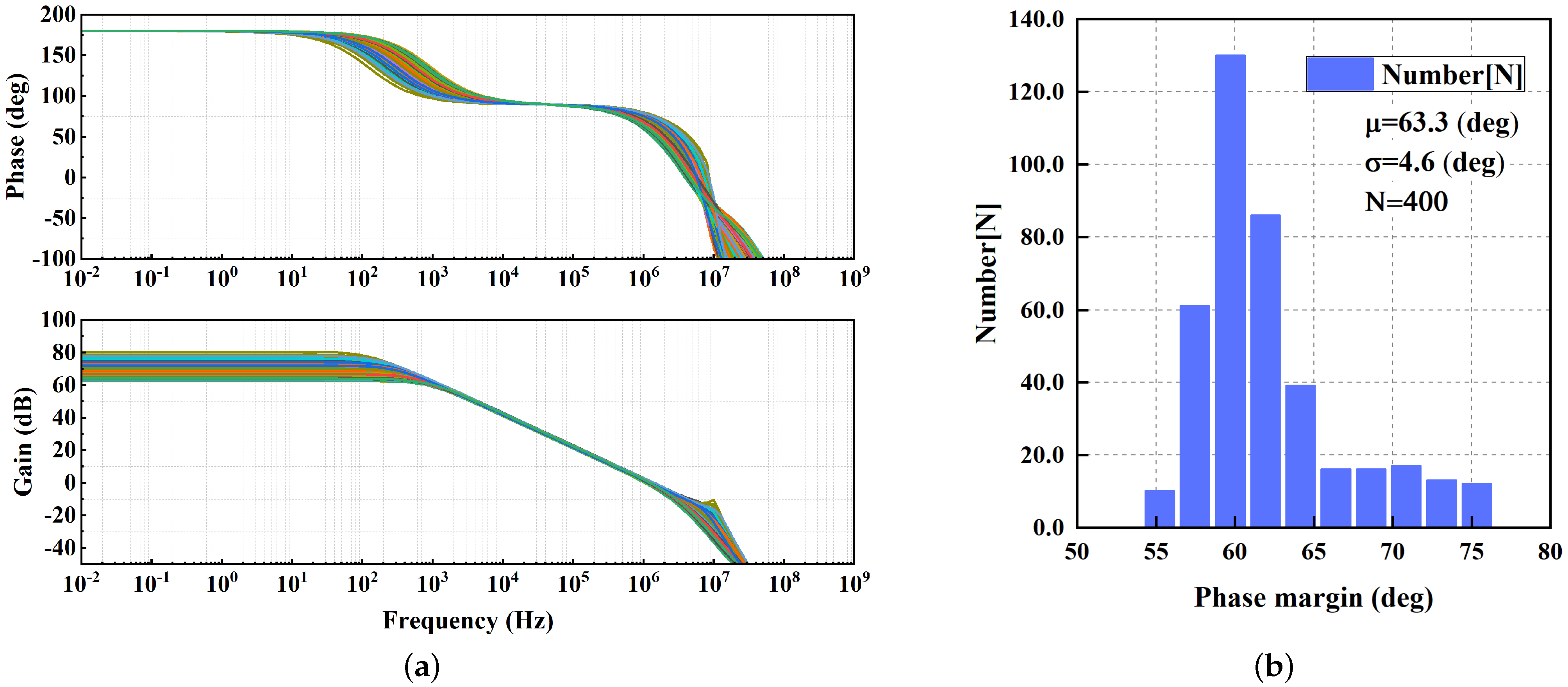
2.4. Stability Analysis
3. Simulation Results and Discussion
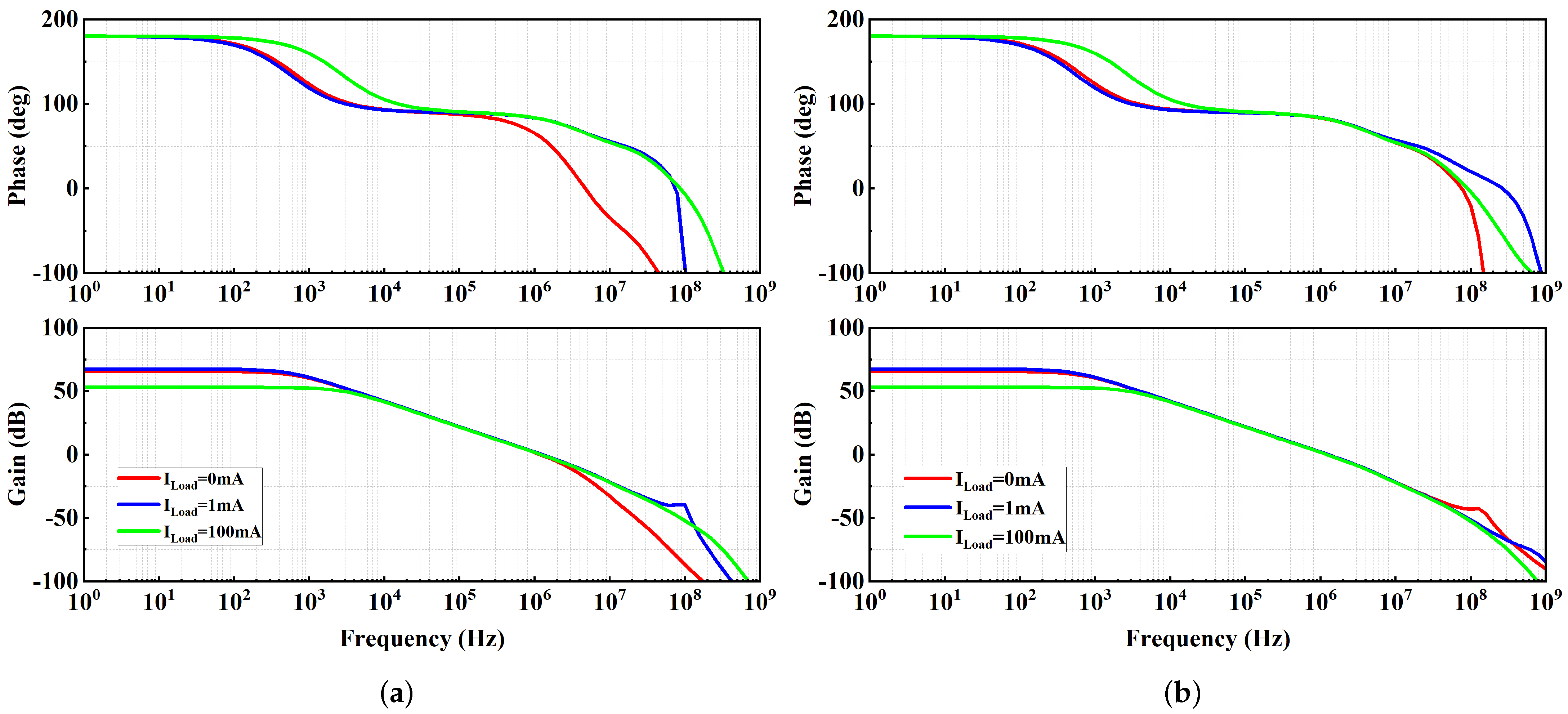
3.1. Open-Loop Frequency Response
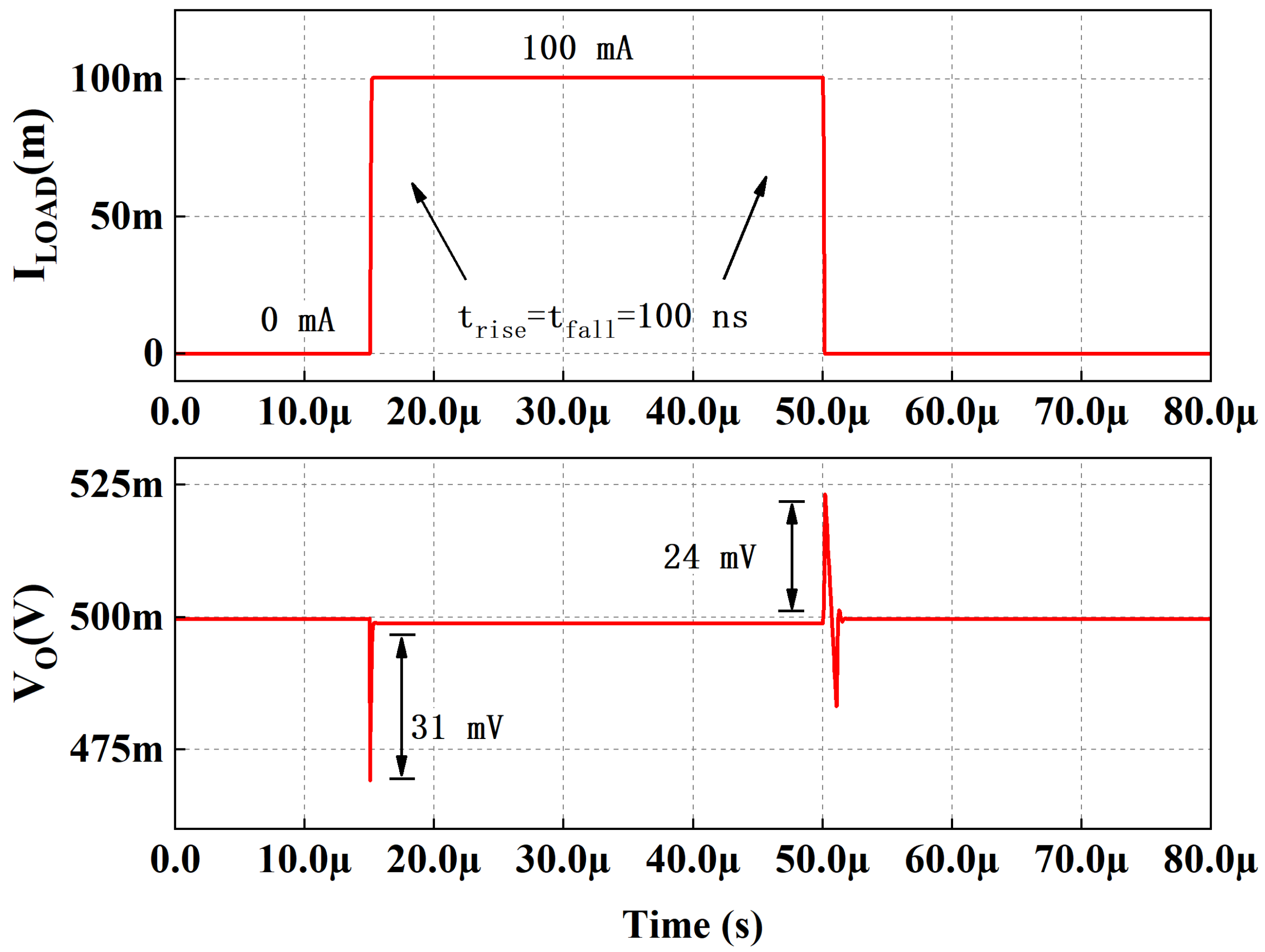
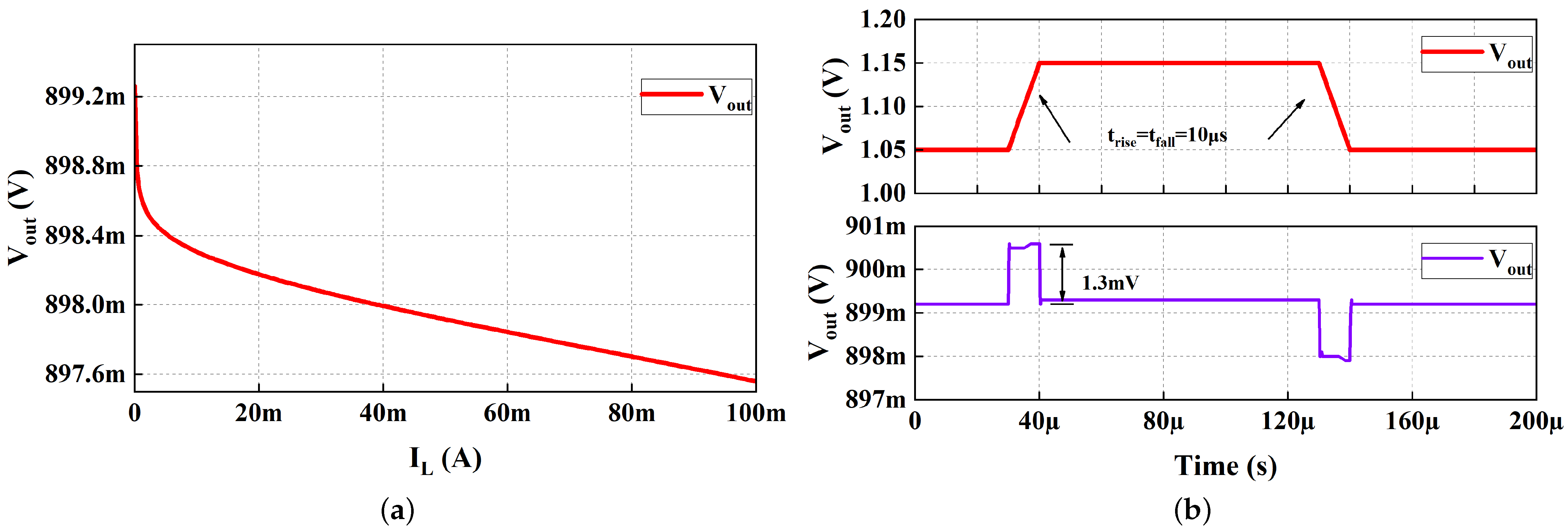
3.2. Load Transient Response, Load Regulation, Line Transient Response
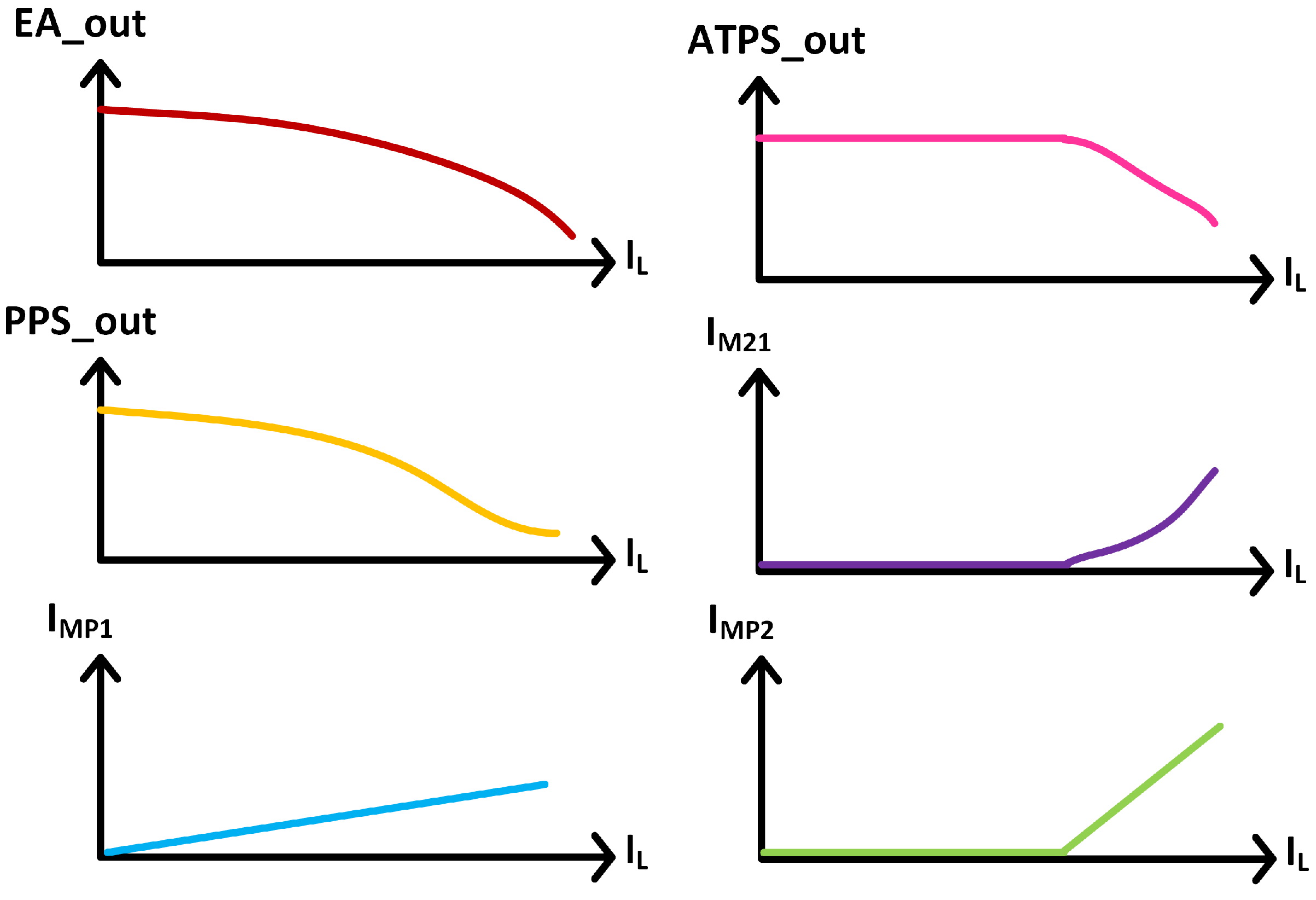
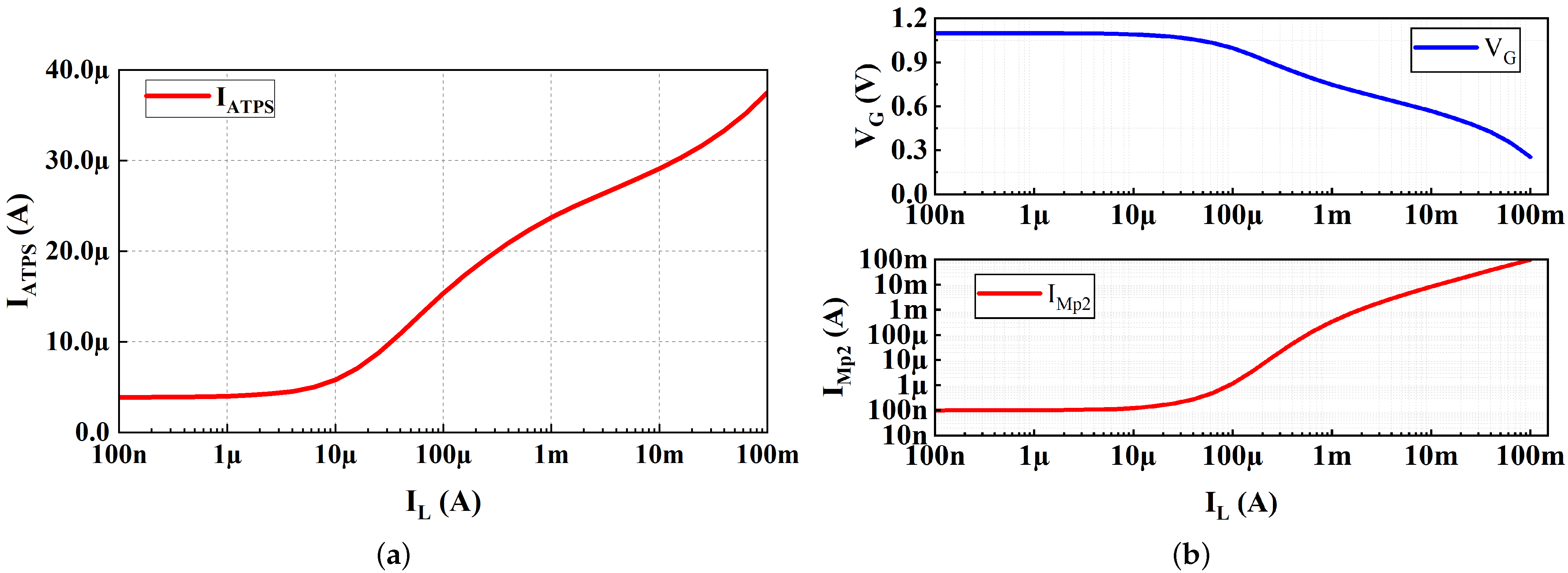
3.3. ATPS
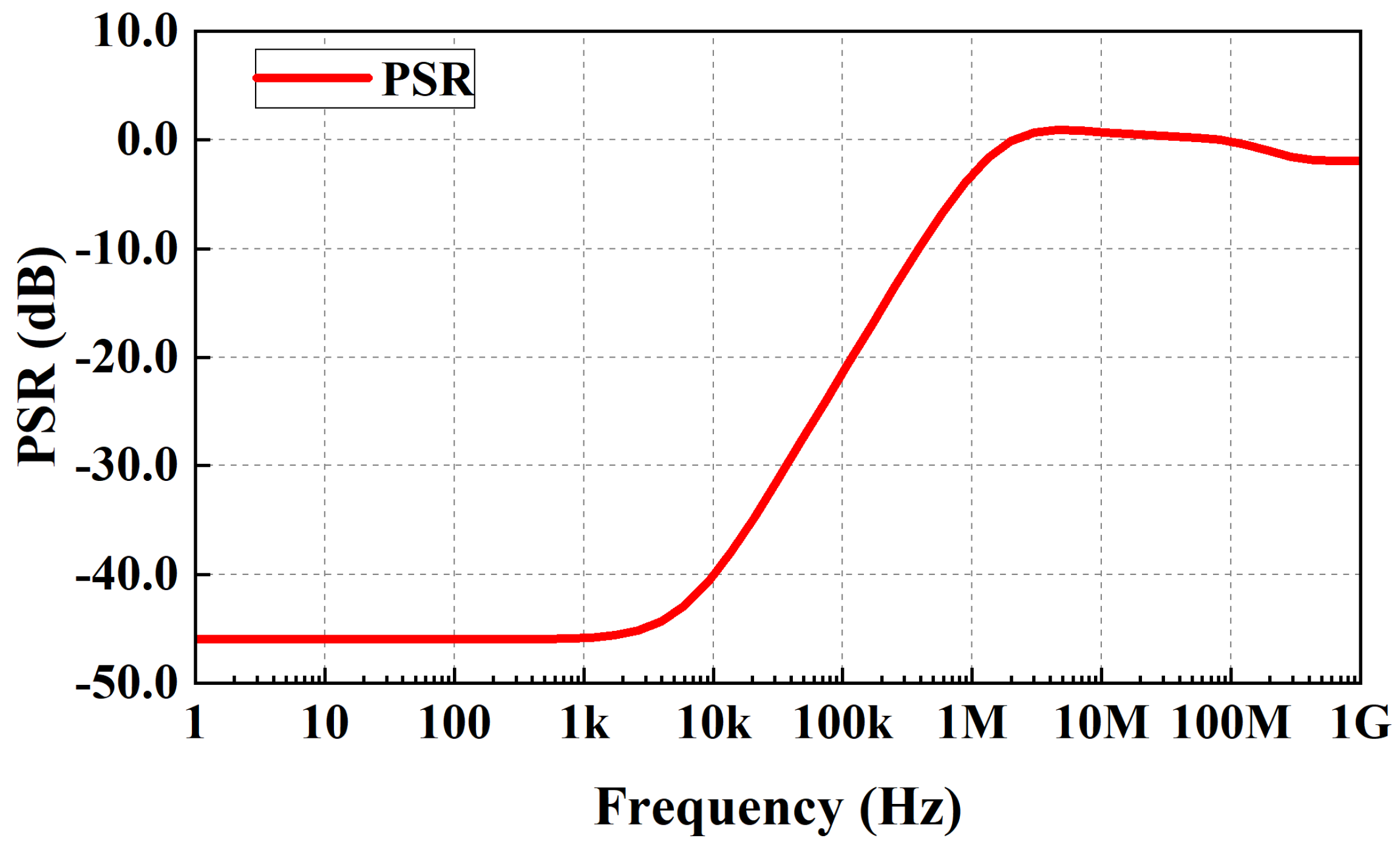
3.4. Power-Supply Rejection
3.5. Performance Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Al-Shyoukh, M.; Lee, H.; Perez, R. A Transient-Enhanced Low-Quiescent Current Low-Dropout Regulator with Buffer Impedance Attenuation. IEEE J. Solid-State Circuits 2007, 42, 1732–1742. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Zhang, Q.; Zhao, X.; Li, S.; Yu, L. Multiple Adaptive Current Feedback Technique for Small-Gain Stages in Adaptively Biased Low-Dropout Regulator. IEEE Trans. Power Electron. 2022, 37, 4039–4049. [Google Scholar] [CrossRef]
- Li, G.; Qian, H.; Guo, J.; Mo, B.; Lu, Y.; Chen, D. Dual Active-Feedback Frequency Compensation for Output-Capacitorless LDO with Transient and Stability Enhancement in 65-nm CMOS. IEEE Trans. Power Electron. 2020, 35, 415–429. [Google Scholar] [CrossRef]
- Lim, Y.; Lee, J.; Lee, Y.; Song, S.S.; Kim, H.T.; Lee, O.; Choi, J. An External Capacitor-Less Ultralow-Dropout Regulator Using a Loop-Gain Stabilizing Technique for High Power-Supply Rejection over a Wide Range of Load Current. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2017, 25, 3006–3018. [Google Scholar] [CrossRef]
- Zhou, Y.; Zheng, Y.; Leung, K.N. An Output-Capacitorless Low-Dropout Regulator with High Slew Rate and Unity-Gain Bandwidth. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–14 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Chong, S.; Chan, P.K. A 0.9 uA Quiescent Current Output-Capacitorless LDO Regulator with Adaptive Power Transistors in 65-nm CMOS. IEEE Trans. Circuits Syst. Regul. Pap. 2013, 60, 1072–1081. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, D.; Chan, P.K. A Quiescent 407-nA Output-Capacitorless Low-Dropout Regulator with 0–100-mA Load Current Range. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2019, 27, 1093–1104. [Google Scholar] [CrossRef]
- Ming, X.; Kuang, J.J.; Gong, X.c.; Lin, Z.; Xiong, J.; Qin, Y.; Wang, Z.; Zhang, B. A Fast-Transient Capacitorless LDO with Dual Paths Active-Frequency Compensation Scheme. IEEE Trans. Power Electron. 2022, 37, 10332–10347. [Google Scholar] [CrossRef]
- Chong, S.S.; Chan, P.K. A Sub-1 V Transient-Enhanced Output-Capacitorless LDO Regulator With Push–Pull Composite Power Transistor. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2014, 22, 2297–2306. [Google Scholar] [CrossRef]
- Qu, X.; Zhou, Z.K.; Zhang, B.; Li, Z.J. An Ultralow-Power Fast-Transient Capacitor-Free Low-Dropout Regulator with Assistant Push–Pull Output Stage. IEEE Trans. Circuits Syst. II Express Briefs 2013, 60, 96–100. [Google Scholar] [CrossRef]
- Hong, S.W.; Cho, G.H. High-Gain Wide-Bandwidth Capacitor-Less Low-Dropout Regulator (LDO) for Mobile Applications Utilizing Frequency Response of Multiple Feedback Loops. IEEE Trans. Circuits Syst. Regul. Pap. 2016, 63, 46–57. [Google Scholar] [CrossRef]
- Lu, Y.; Li, C.; Yan, Z.; Huang, M.; Seng-Pan, U.; Rui, P.M. A 312 ps response-time LDO with enhanced super source follower in 28 nm CMOS. Electron. Lett. 2016, 52, 1368–1370. [Google Scholar] [CrossRef]
- Cai, G.; Lu, Y.; Zhan, C.; Martins, R.P. A Fully Integrated FVF LDO with Enhanced Full-Spectrum Power Supply Rejection. IEEE Trans. Power Electron. 2021, 36, 4326–4337. [Google Scholar] [CrossRef]
- Lu, Y.; Ki, W.H.; Yue, C.P. 17.11 A 0.65ns-response-time 3.01ps FOM fully-integrated low-dropout regulator with full-spectrum power-supply-rejection for wideband communication systems. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 9–13 February 2014; pp. 306–307. [Google Scholar] [CrossRef]
- Bu, S.; Guo, J.; Leung, K.N. A 200-ps-Response-Time Output-Capacitorless Low-Dropout Regulator with Unity-Gain Bandwidth >100 MHz in 130-nm CMOS. IEEE Trans. Power Electron. 2018, 33, 3232–3246. [Google Scholar] [CrossRef]
- Lau, S.K.; Mok, P.K.T.; Leung, K.N. A Low-Dropout Regulator for SoC with Q-Reduction. IEEE J. Solid-State Circuits 2007, 42, 658–664. [Google Scholar] [CrossRef]
- Yang, B.; Drost, B.; Rao, S.; Hanumolu, P.K. A high-PSR LDO using a feedforward supply-noise cancellation technique. In Proceedings of the 2011 IEEE Custom Integrated Circuits Conference (CICC), San Jose, CA, USA, 19–21 September 2011; pp. 1–4. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | This Work | [3] | [9] | [8] | [4] |
|---|---|---|---|---|---|
| Year | 2022 | 2020 | 2022 | 2014 | 2017 |
| Technology(nm) | 40 | 65 | 65 | 350 | 40 |
| (mA) | 100 | 100 | 50 | 100 | 200 |
| (mA) | 0 | 0 | 0 | 0.01 | 0 |
| (V) | 1.1 | 0.95–1.2 | 0.75–1.2 | 2.7–3.3 | 1.1 |
| (V) | 0.9 | 0.8 | 0.5 | 2.5 | 1 |
| (pF) | 0.7 | 6 | 2 | 14 | 4 |
| (pF) | 0–100 | 0–100 | 0–100 | 0–100 | 0–100 |
| PSR(dB@kHz) | −46@1 | −33@10 | −46@1 | −41@10 | −66@100 |
| (A) | 24.6–65 | 14 | 16.2 | 66 | 275 |
| (mV) | 33 | 230 | 103 | 255 | 124 |
| Edge Time(ns) | 100 | 220 | 100 | 400 | 100 |
| Load Regulation(mV/mA) | 0.017 | 0.09 | 0.48 | 0.06 | 0.019 |
| FOM(ns· V/m2) * | 0.507 | 1.67 | 0.79 | 0.632 | 10.65 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, C.; Chen, Z.; Ni, S.; Wang, Q.; Li, X.; Chen, H.; Song, Z. A Fully Integrated Low-Dropout Regulator with Improved Load Regulation and Transient Responses. Micromachines 2022, 13, 1668. https://doi.org/10.3390/mi13101668
Hu C, Chen Z, Ni S, Wang Q, Li X, Chen H, Song Z. A Fully Integrated Low-Dropout Regulator with Improved Load Regulation and Transient Responses. Micromachines. 2022; 13(10):1668. https://doi.org/10.3390/mi13101668
Chicago/Turabian StyleHu, Chenkai, Zhizhi Chen, Shenglan Ni, Qian Wang, Xi Li, Houpeng Chen, and Zhitang Song. 2022. "A Fully Integrated Low-Dropout Regulator with Improved Load Regulation and Transient Responses" Micromachines 13, no. 10: 1668. https://doi.org/10.3390/mi13101668