
Design and Performance Research of a Precision Micro-Drive Reduction System without Additional Motion
Abstract
:1. Introduction
2. Design of the Precision Micro-Drive Reduction System
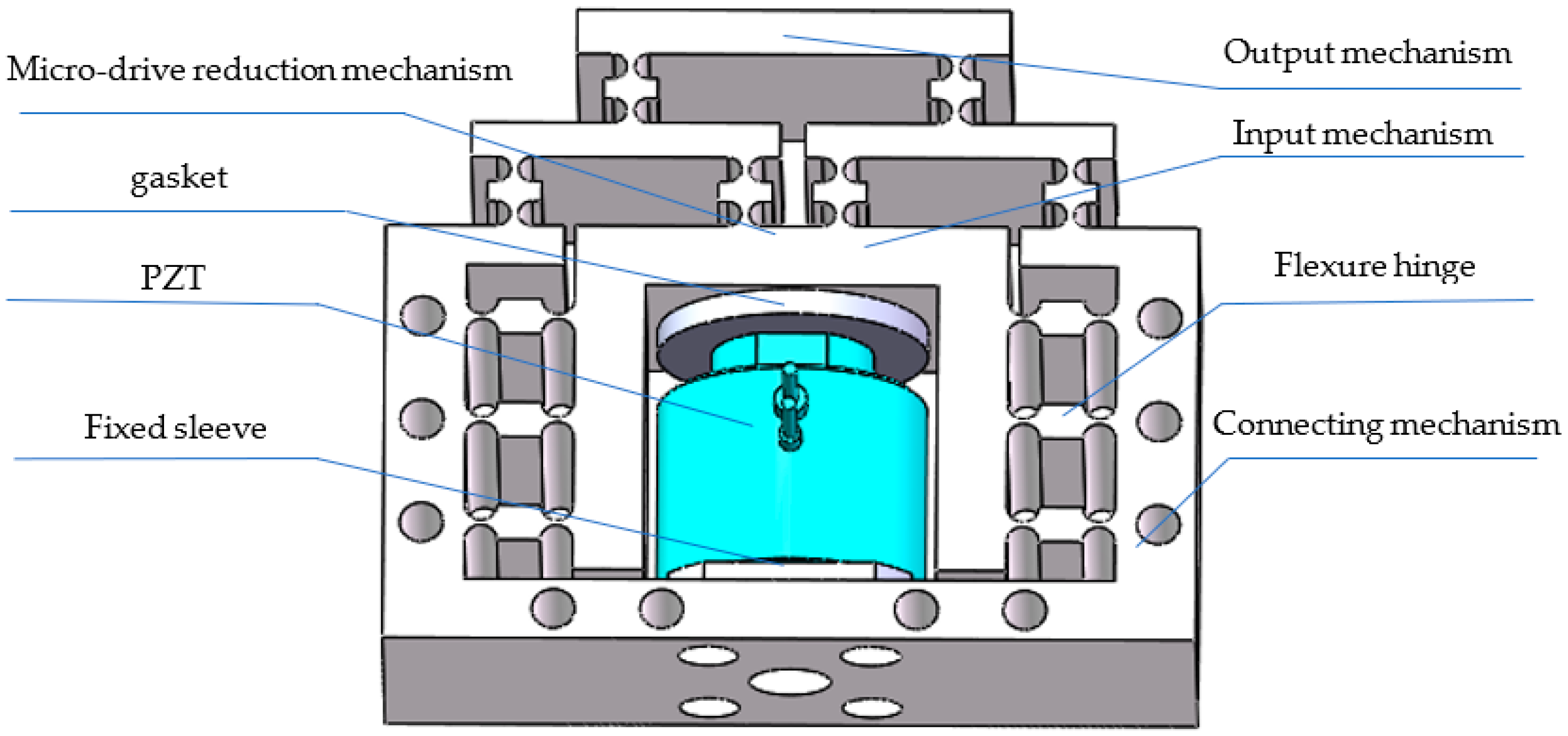
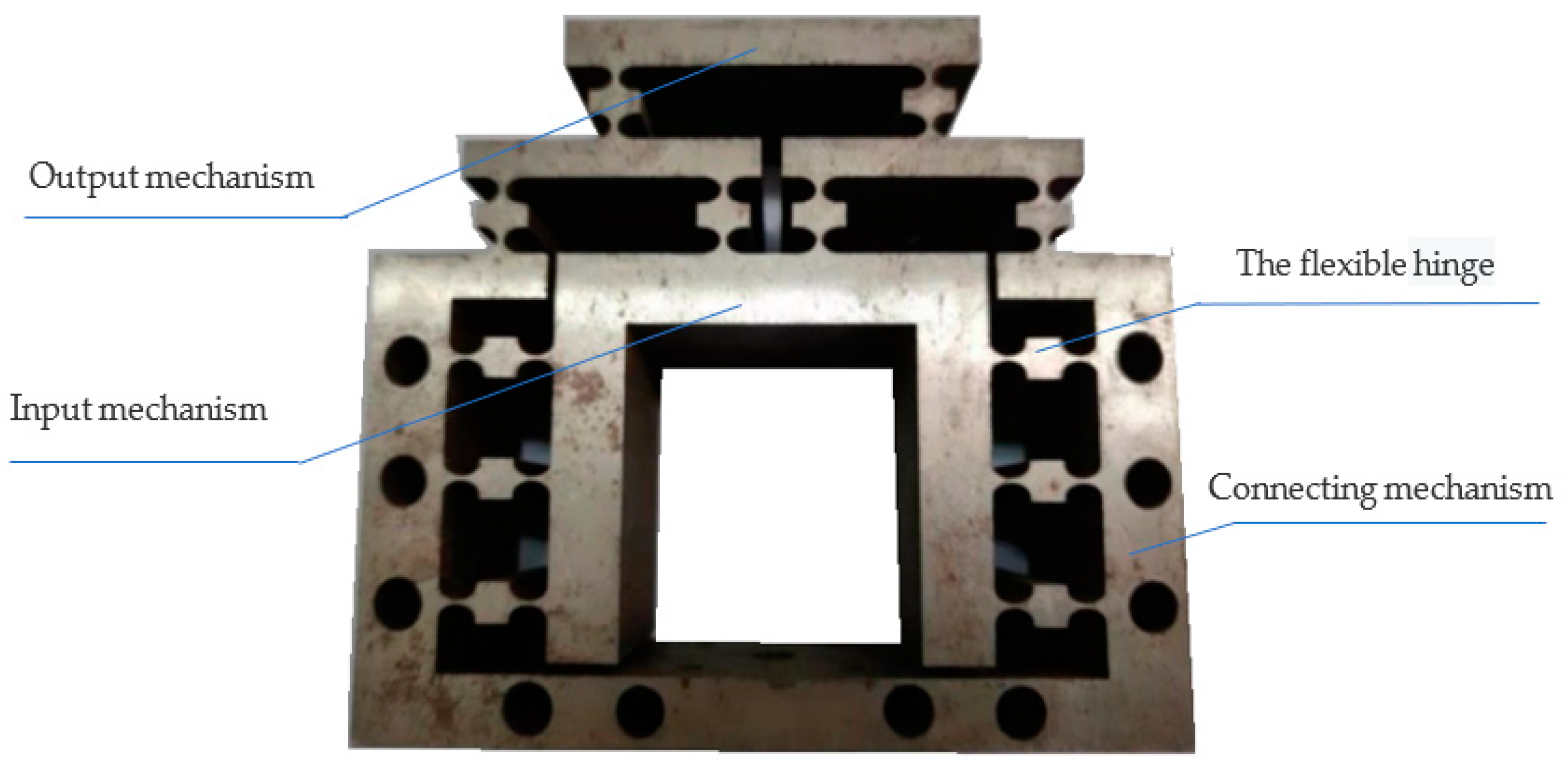
2.1. System Structure Design
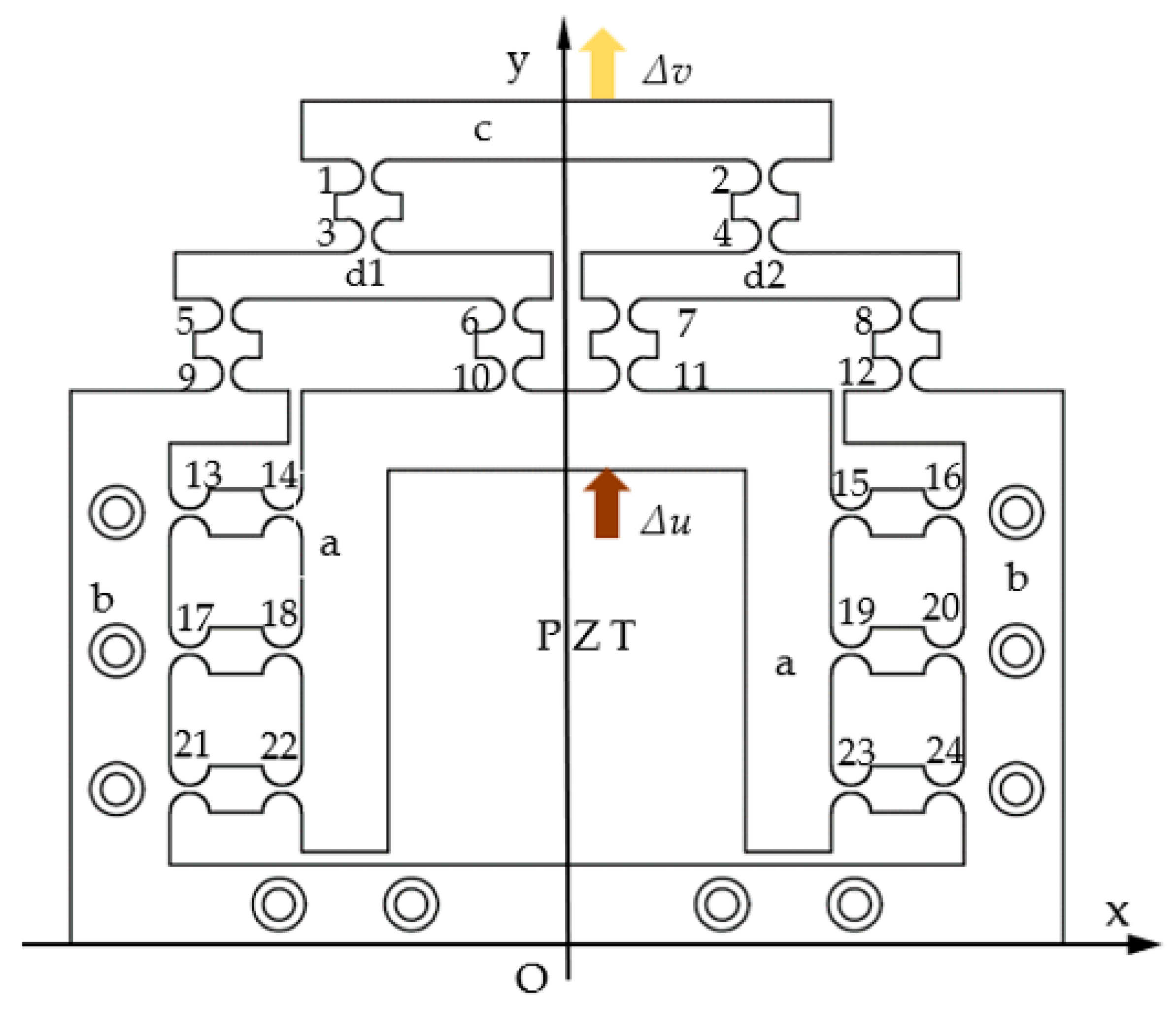
2.2. Design of the Micro-Drive Reduction Mechanism
2.3. Analysis of the Mechanism’s Working Principle
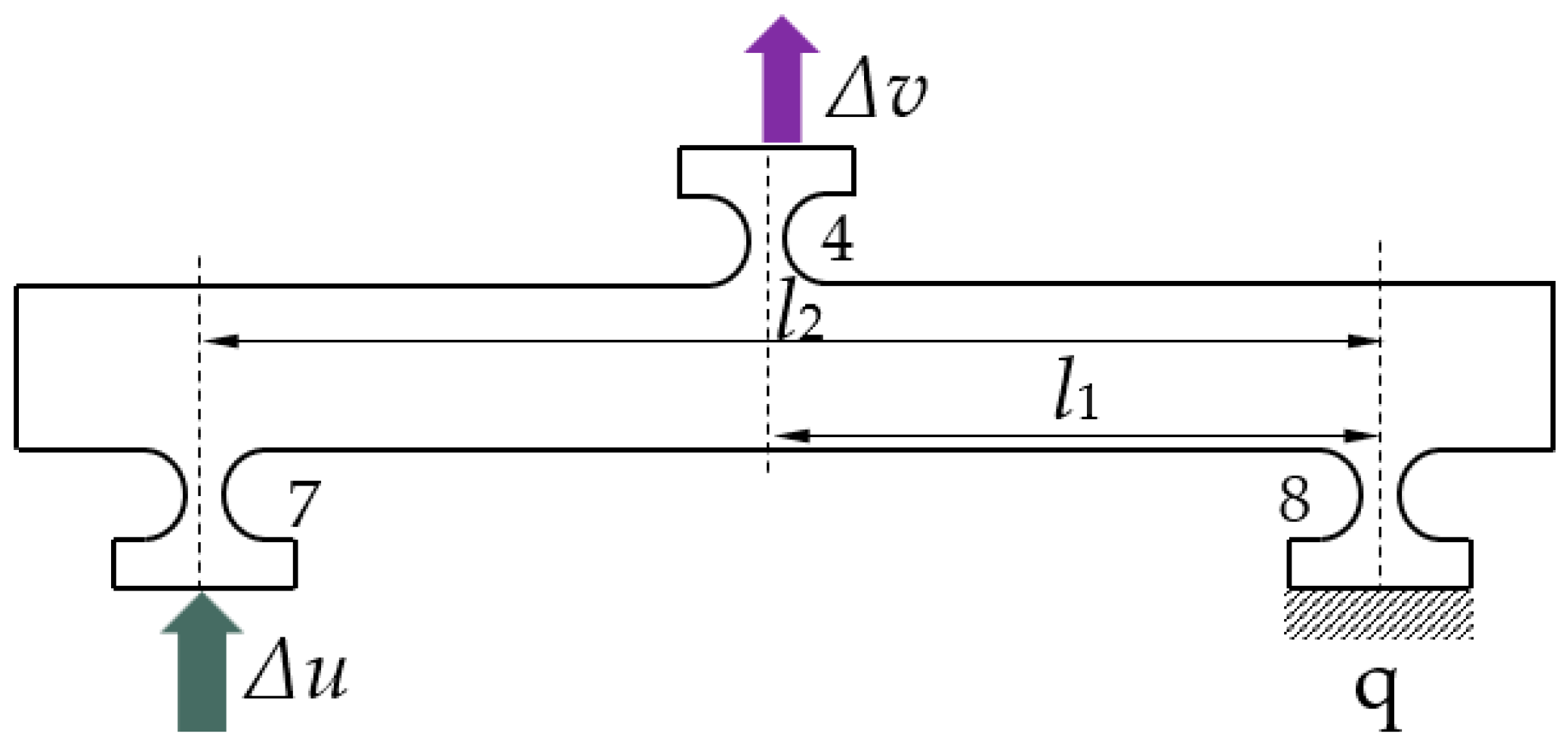
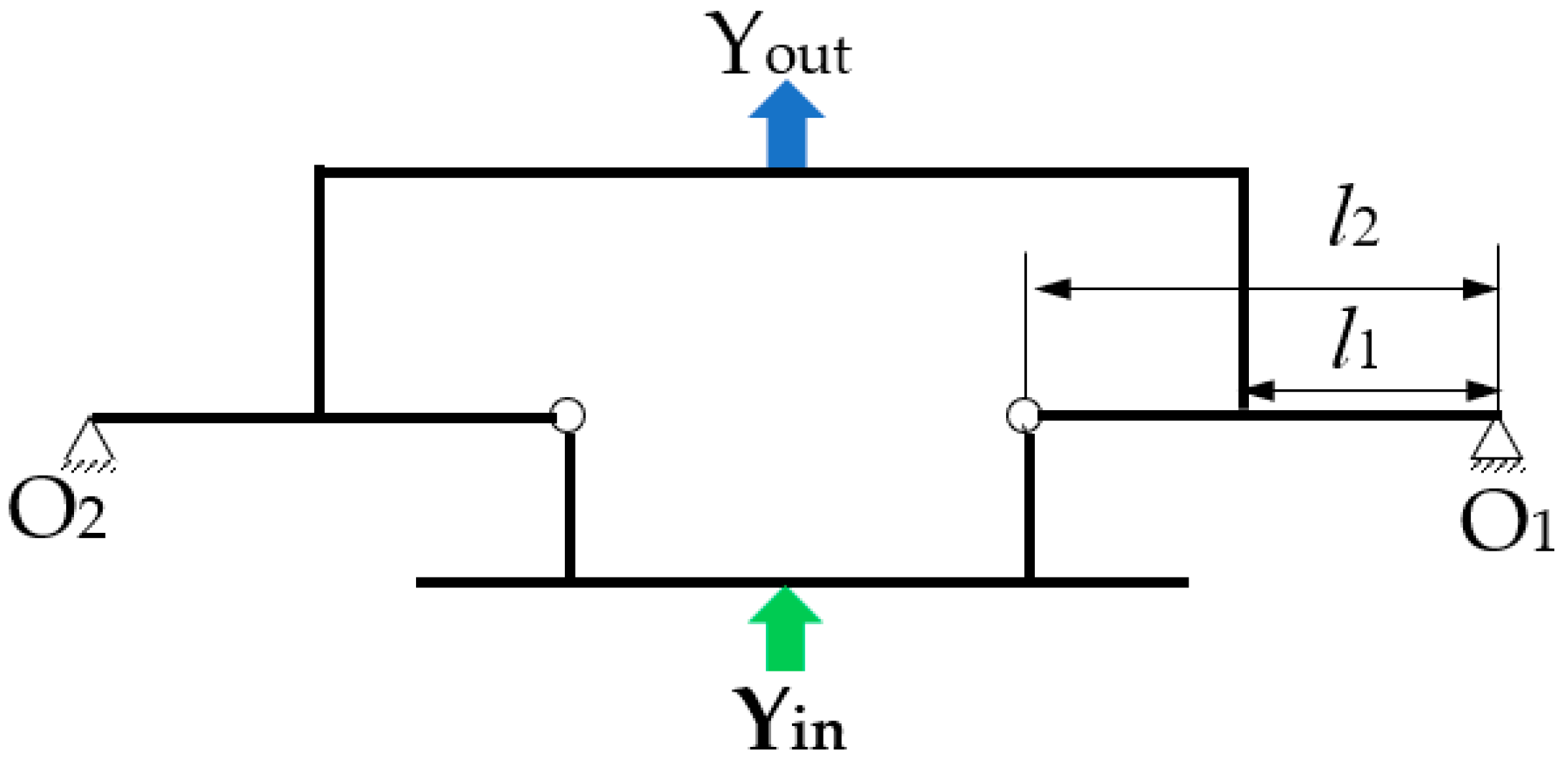
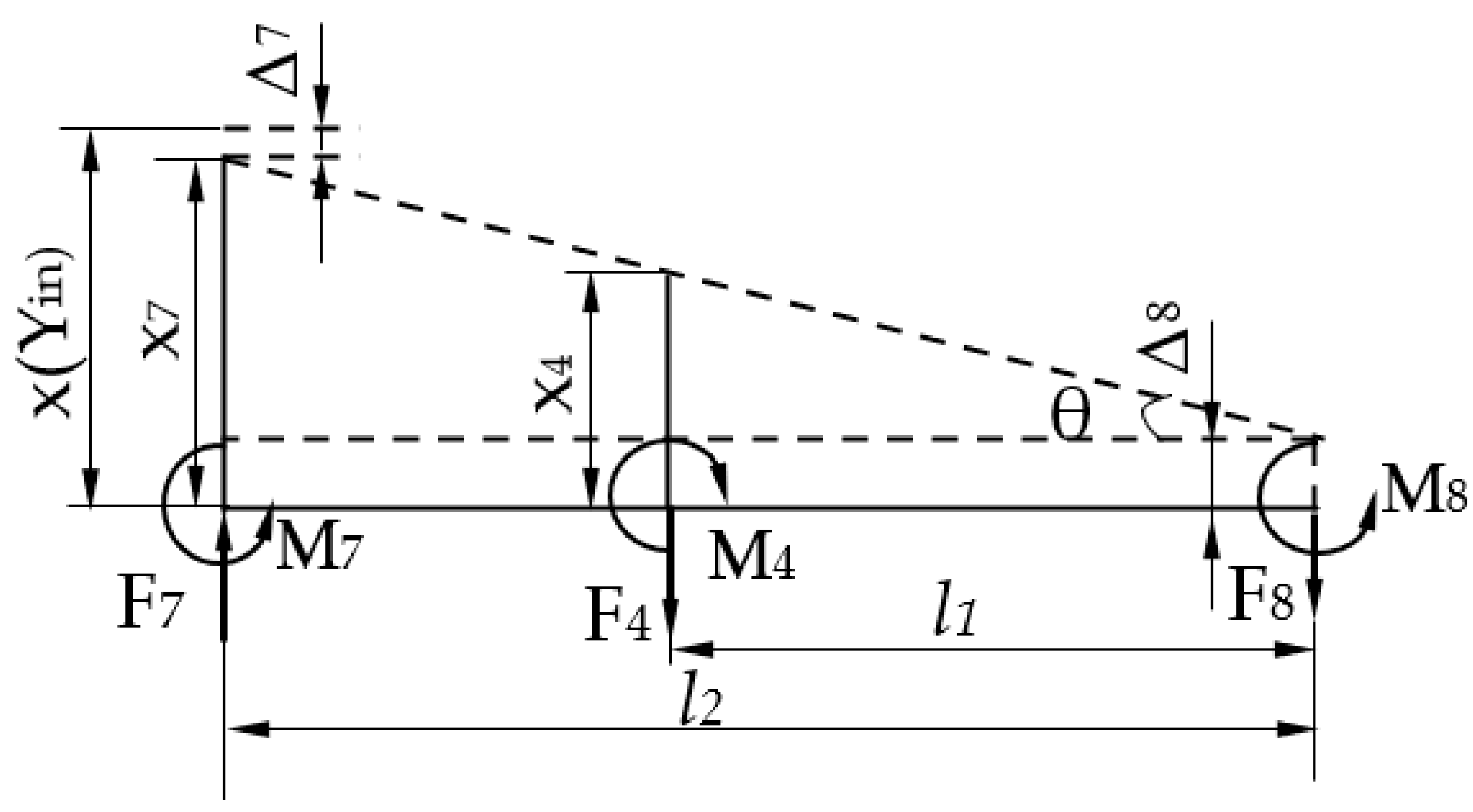
2.3.1. Principle of Lever
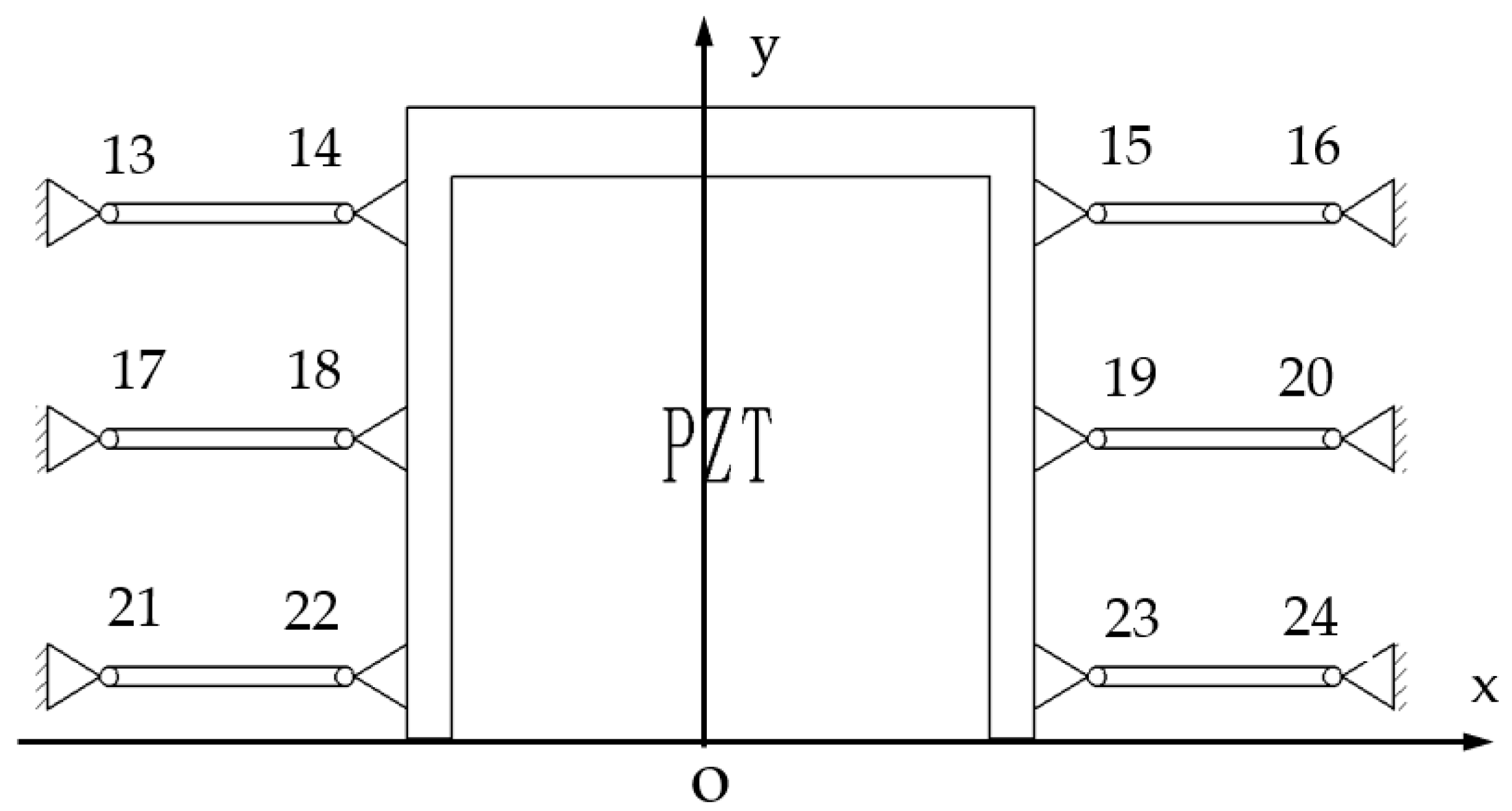
2.3.2. Principle of a Balancing Additional Force
2.3.3. Working Principle of the Mechanism
2.4. Reduction Ratio Calculation
- KF represents the axial tension-compression stiffness of the flexure hinge;
- KM represents the angular stiffness of the flexure hinge;
- E represents the elastic modulus of the mechanism material;
- s represents the ratio of the cutting radius of the flexure hinge to the minimum thickness.
2.5. Micro-Driver Selection
3. Performance Analysis of the Reduction System
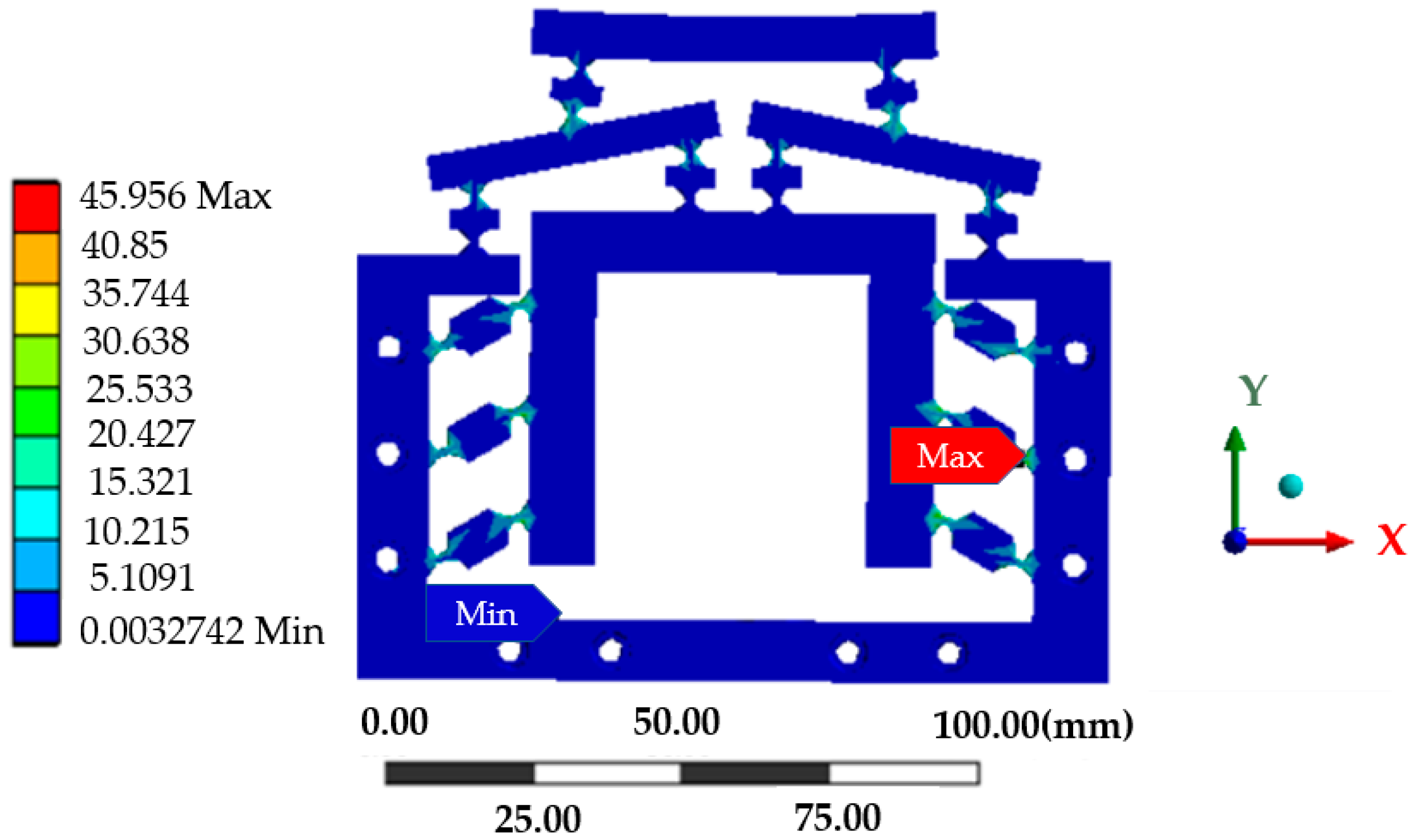
3.1. Strength Analysis
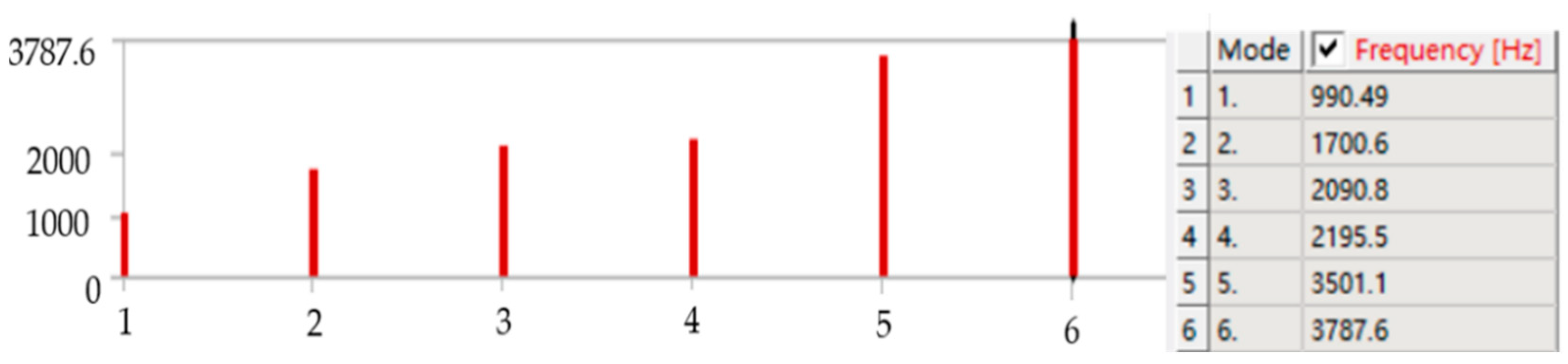
3.2. Modal Analysis
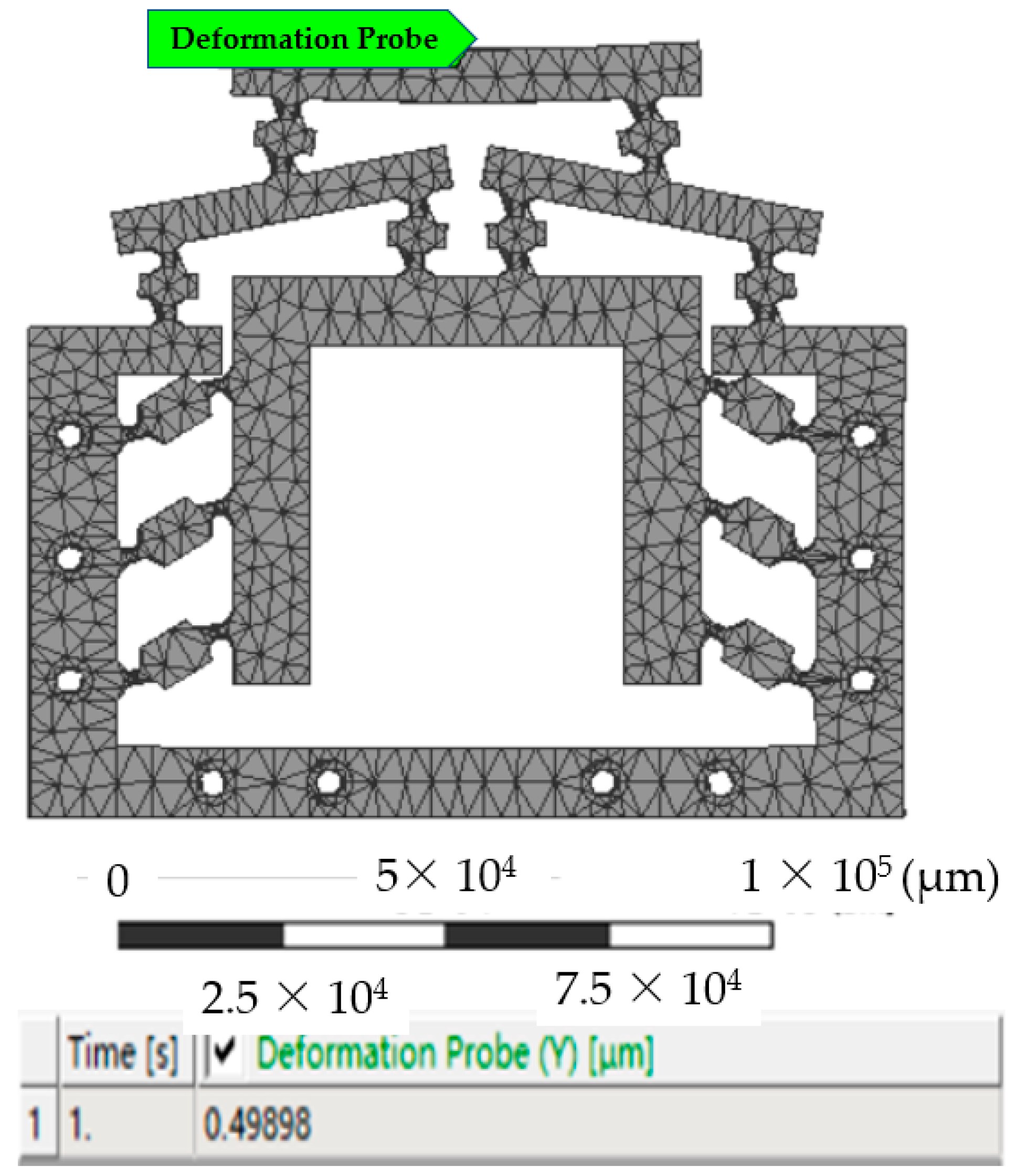
3.3. Kinematic Analysis
4. Experiment and Analysis
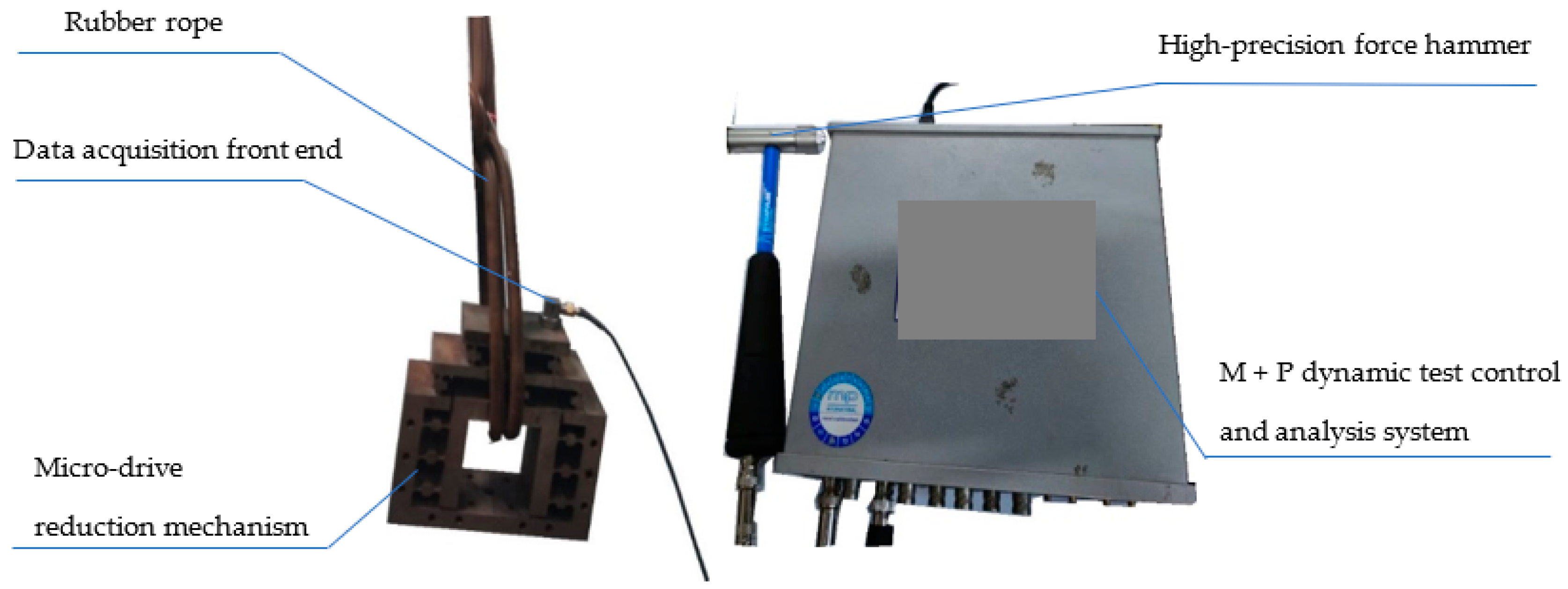
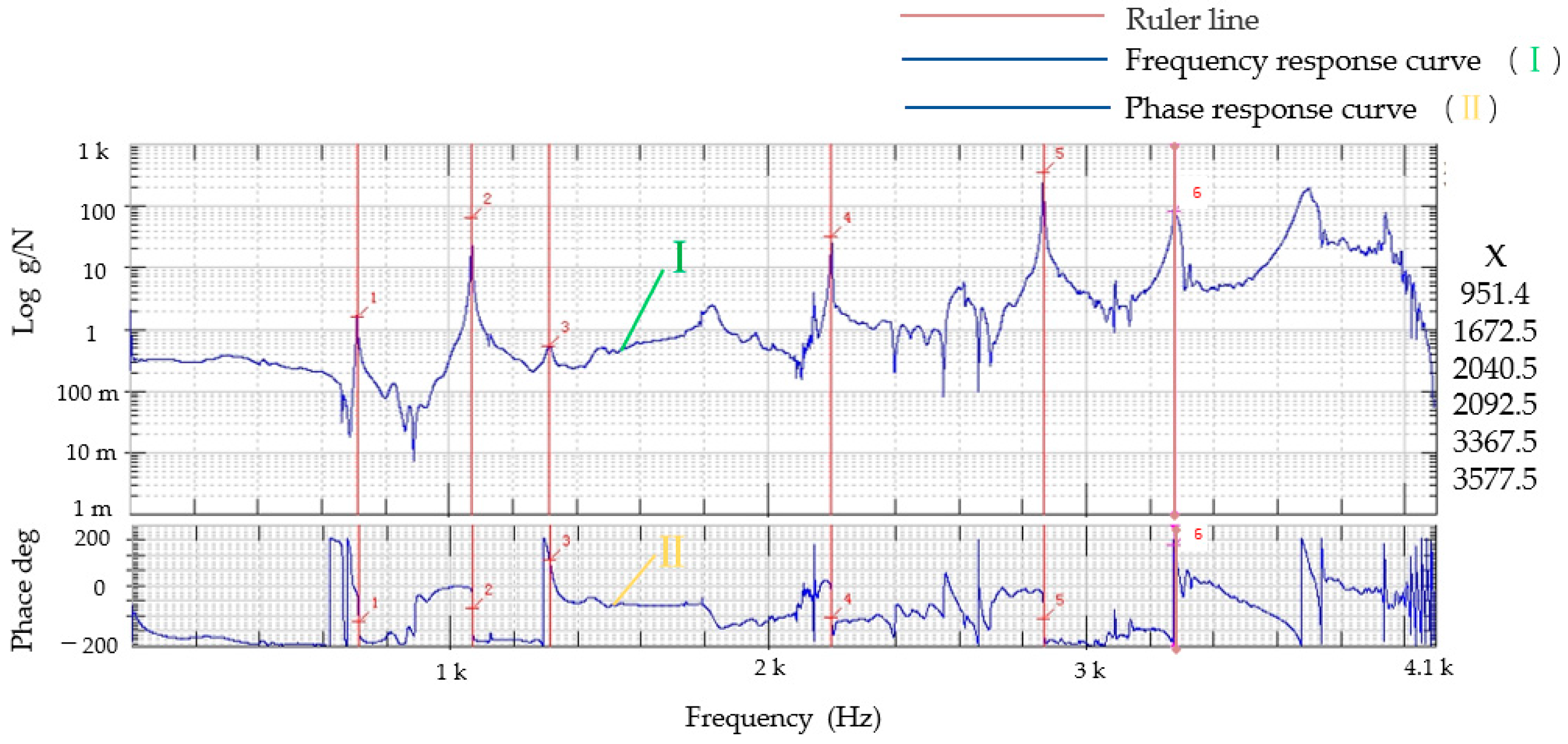
4.1. Dynamic Performance Experiment
- (1)
- The finite element analysis and experimental analysis results were relatively consistent, and the maximum error was 6.04%, indicating that the analysis results were accurate and reliable, and the lowest natural frequency was approximately 990 Hz, which had good dynamic performance.
- (2)
- In the micro-drive reduction system, P235.1s PZT was used to drive, and its maximum frequency was 300 Hz, which did not resonate with the micro-drive reduction mechanism; thus, the micro-drive reduction system had a good dynamic performance.
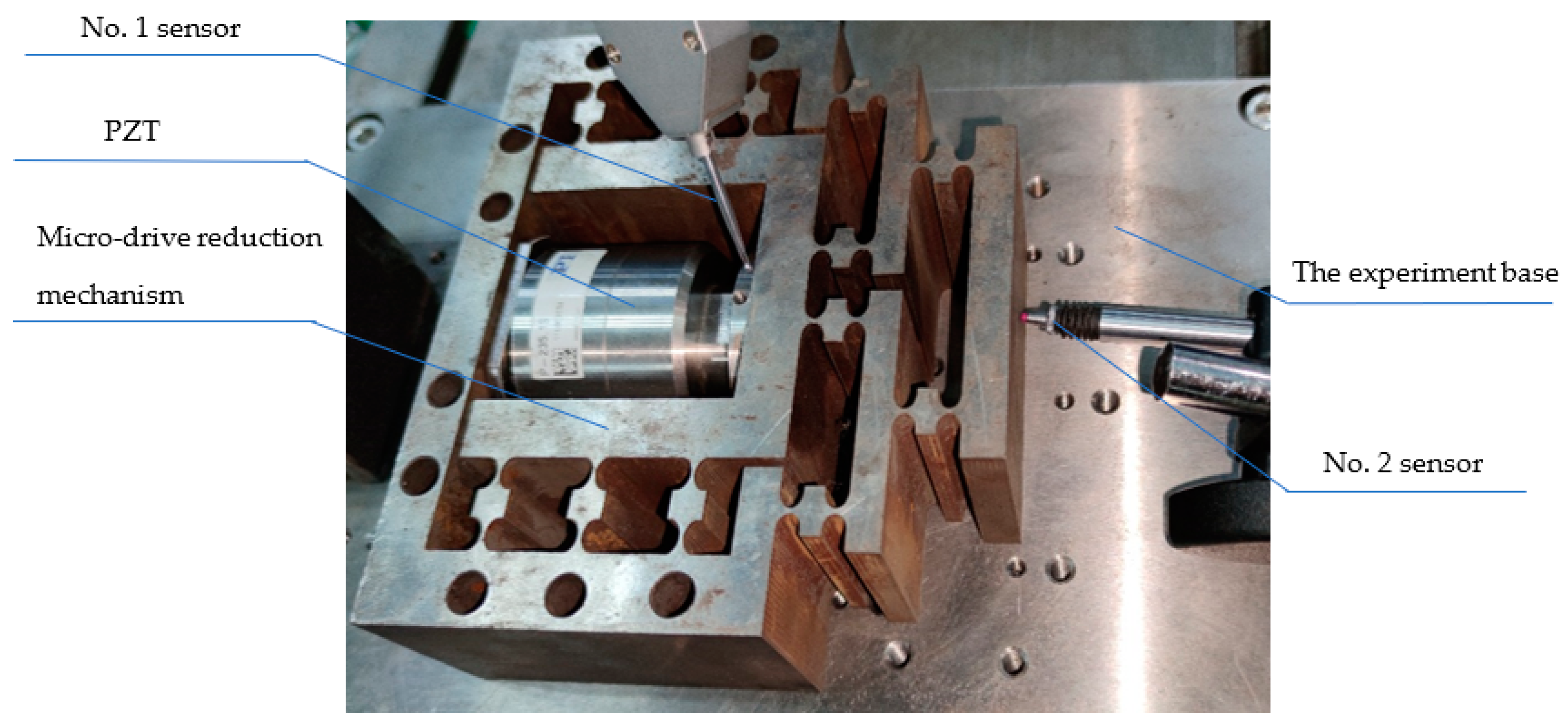
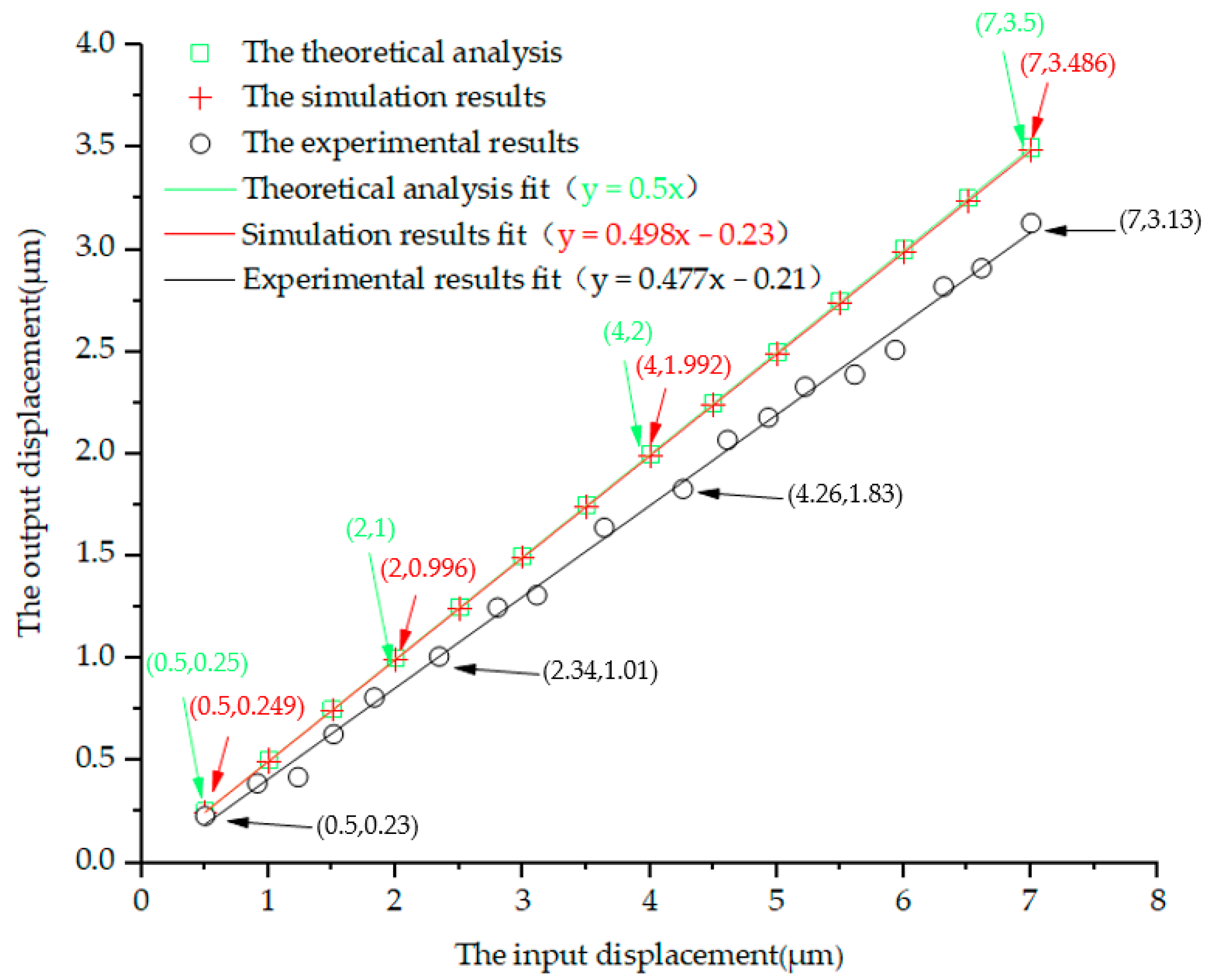
4.2. Reduction Performance Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, M.; Lv, Z.; Zhang, C.; Yang, Y.; Jing, G.; Guo, W.; Lu, Z.; Huang, Y.; Wei, K.; Li, L. Positioning Performance of a Sub-Arc-Second Micro-Drive Rotary System. Micromachines 2021, 12, 1063. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Jing, G.; Lv, Z.; Guo, W.; Huang, Y.; Wei, K.; Li, L.; Feng, B.; Ge, H.; Li, S.; et al. Design and Error Compensation Performance of a Precision Micro-Drive Rotary System. Math. Probl. Eng. 2021, 2021, 3199915. [Google Scholar] [CrossRef]
- Wu, L.; Leng, J.; Ju, B. Digital twins-based smart design and control of ultra-precision machining: A review. Symmetry 2021, 13, 1717. [Google Scholar] [CrossRef]
- Geng, Z.; Tong, Z.; Jiang, X. Review of geometric error measurement and compensation techniques of ultra-precision machine tools. Lam 2021, 2, 211–227. [Google Scholar] [CrossRef]
- Meng, Q.; Li, Y.; Xu, J. A novel analytical model for flexure-based proportion compliant mechanisms. Precis. Eng. 2014, 38, 449–457. [Google Scholar] [CrossRef]
- Wang, P.; Xu, Q. Design of a flexure-based constant-force XY precision positioning stage. Mech. Mach. Theory 2017, 108, 1–13. [Google Scholar] [CrossRef]
- Arata, J.; Kogiso, S.; Sakaguchi, M.; Nakadate, R.; Oguri, S.; Uemura, M.; Byunghyun, C.; Akahoshi, T.; Ikeda, T.; Hashizume, M. Articulated minimally invasive surgical instrument based on compliant mechanism. Int. J. Comput. Assist. Radiol. Surg. 2015, 10, 1837–1843. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, Q. Mechanical design analysis and testing of a large-range compliant microgripper. Mech. Sci. 2016, 7, 119–126. [Google Scholar] [CrossRef]
- Culpepper, M.; Anderson, G. Design of a low-cost nano-manipulator which utilizes a monolithic, spatial compliant mechanism. Precis. Eng. 2004, 28, 469–482. [Google Scholar] [CrossRef]
- Nah, S.; Zhong, Z. A microgripper using piezoelectric actuation for micro-object manipulation. Sens. Actuators A Phys. 2007, 133, 218–224. [Google Scholar] [CrossRef]
- Kenton, B.; Leang, K. Design and control of a three-axis serial-kinematic high-bandwidth nanopositioner. IEEE/ASME Trans. Mechatron. 2012, 17, 356–369. [Google Scholar] [CrossRef]
- Li, H.; Hao, G. Position-Space-Based Design of a Symmetric Spatial Translational Compliant Mechanism for Micro-/Nano-Manipulation. Micromachines 2018, 9, 189. [Google Scholar] [CrossRef] [PubMed]
- Polit, S.; Dong, J. Design of high-bandwidth high-precision flexure-based nanopositioning modules. Manuf. Syst. 2009, 28, 71–77. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. A Novel Piezoactuated XY Stage with Parallel, Decoupled, and Stacked Flexure Structure forMicro-/Nanopositioning. IEEE Trans. Ind. Electron. 2011, 58, 3601–3615. [Google Scholar] [CrossRef]
- Lv, B.; Wang, G.; Li, B.; Zhou, H.; Hu, Y. Research on a 3-DOF motion device based on the flexible mechanism driven by the piezoelectric actuators. Micromachines 2018, 9, 578. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.; Lee, D.; Lee, S.; Kim, Y.; Jung, Y. Effects of hinge design of horizontal-swing fast tool servo (HFTS)for micro-patterning on a roll. Int. J. Adv. Manuf. Technol. 2018, 95, 233–241. [Google Scholar] [CrossRef]
- Xu, Q.; Li, Y. Analytical modeling, optimization and testing of a compound bridge-type compliant displacement amplifier. Mech. Mach. Theory 2011, 46, 183–200. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, X. A planar 3-DOF nanopositioning platform with large magnification. Precis. Eng. 2016, 46, 221–231. [Google Scholar] [CrossRef]
- Xu, Q. A novel compliant micropositioning stage with dual ranges and resolutions. Sens. Actuators A Phys. 2014, 205, 6–14. [Google Scholar] [CrossRef]
- Sun, X.; Yang, B. A new methodology for developing flexure-hinged displacement amplifiers with micro-vibration suppression for a giant magnetostrictive micro drive system. Sens. Actuators A Phys. 2017, 263, 30–43. [Google Scholar] [CrossRef]
- Delibas, B.; Koc, B.; Thielager, J.; Stiebel, C. A novel drive and control method for piezoelectric motors in microscopy stages. In Proceedings of the Euspen’s 21st International Conference & Exhibition, Copenhagen, Denmark, 10 June 2021. [Google Scholar]
- Sun, F.; Hao, Y.; Xu, F.; Jin, J.; Li, Q.; Tong, L.; Zhang, M.; Zhang, X. Proposal of an Equal-Stiffness and Equal-Stroke 2D Micro-Positioning Platform Driven by Piezoelectric Actuators. Actuators 2020, 9, 47. [Google Scholar] [CrossRef]
- Xue, X.; Tian, X.; Zhang, D.; Liu, X. Design of a piezo-driven inchworm flexure stage for precision positioning. Int. J. Appl. Ellctrom. 2016, 50, 569–581. [Google Scholar] [CrossRef]
- Tanikawa, T.; Ukiana, M.; Morita, K.; Koseki, Y.; Ohba, K.; Fujii, K.; Arai, T. Design of 3-DOF parallel mechanism with thin plate for micro finger module in micro manipulation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 2, pp. 1778–1783. [Google Scholar]
- Panin, F.; Chang, J. A new displacement reduction mechanism for fine positioning. Trans. ASME J. Mech. Des. 1994, 116, 770–776. [Google Scholar]
- Sakuma, S.; Arai, F. Cellular force measurement using a nanometric-probe-integrated microfluidic chip with a displacement reduction mechanism. J. Robot. Mechatron. 2013, 25, 277–284. [Google Scholar] [CrossRef]
- Kim, J.J.; Choi, Y.M.; Ahn, D.; Hwang, B.; Gweon, D.G.; Jeong, J. A millimeter-range flexure-based nano-positioning stage using a self-guided displacement amplification mechanism. Mech. Mach. Theory 2012, 50, 109–120. [Google Scholar] [CrossRef]
- Wang, R.Z.; Zhang, X.M. Optimal design of a planar parallel 3-DOF nanopositioner with multi-objective. Mech. Mach. Theory 2017, 112, 61–83. [Google Scholar] [CrossRef]
- Zhang, X.Z.; Xu, Q.S. Design and testing of a new 3-DOF spatial flexure parallel micro positioning stage. Int. J. Precis. Eng. Manuf. 2018, 19, 109–118. [Google Scholar] [CrossRef]
- Bhagat, U.; Shirinzadeh, B.; Clark, L.; Chea, P.; Qin, Y.D.; Tian, Y.L.; Zhang, D.W. Design and analysis of a novel flexure-based 3-DOF mechanism. Mech. Mach. Theory 2014, 74, 173–187. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. Modeling and performance evaluation of a flexure-based XY parallel micro manipulator. Mech. Mach. Theory 2009, 44, 2127–2152. [Google Scholar] [CrossRef]
- Zhu, W.-L.; Zhu, Z.; Guo, P.; Ju, B.F. A novel hybrid actuation mechanism based XY nano positioning stage with totally decoupled kinematics. Mech. Syst. Signal Process. 2018, 99, 747–759. [Google Scholar] [CrossRef]
- Li, Y.; Cheung, C.; Zhu, Z.; Chen, X. Design and analysis of a novel compact XYZ parallel precision positioning stage. Microsyst. Technol. 2021, 27, 1925–1932. [Google Scholar]
- Ma, Y.; Wang, F.; Lu, K.; Zhang, D. A novel XYZ micro/nano positioner with an amplifier based on L-shape levers and half-bridge structure. Sens. Actuators A Phys. 2021, 302, 111777. [Google Scholar]
- P-235 Actuators, Physik Instrumente (PI) GmbH & Co. KG. Available online: https://www.physikinstrumente.com/en/products/linear-actuators/nanopositioning-piezoactuators/p-235-pica-power-piezo-actuators-101755/ (accessed on 3 September 2022).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicators | Parameter |
|---|---|
| The length of the PZT | 55 mm |
| The closed loop displacement | 0–15 μm |
| The resolution of the | 0.3 nm |
| Maximum frequency of motion | 300 Hz |
| Maximum thrust | 30,000 N |
| Maximum tension | 3500 N |
| Maximum shear force | 707 N |
| Maximum bearing moment | 2 Nm |
| Working voltage | 0–10 V |
| Order Time | Finite Element Calculation of Natural Frequency Values (Hz) | Experimental Natural Frequency Value (Hz) | The Relative Error (%) |
|---|---|---|---|
| 1 | 990.49 | 951.4 | 4.11 |
| 2 | 1700.6 | 1672.5 | 1.68 |
| 3 | 2090.8 | 2040.5 | 2.47 |
| 4 | 2195.5 | 2092.5 | 4.92 |
| 5 | 3501.1. | 3367.5 | 3.97 |
| 6 | 3787.6 | 3577.5 | 6.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Zhang, X.; Zhang, C.; Wu, H.; Yang, Y. Design and Performance Research of a Precision Micro-Drive Reduction System without Additional Motion. Micromachines 2022, 13, 1636. https://doi.org/10.3390/mi13101636
Yang M, Zhang X, Zhang C, Wu H, Yang Y. Design and Performance Research of a Precision Micro-Drive Reduction System without Additional Motion. Micromachines. 2022; 13(10):1636. https://doi.org/10.3390/mi13101636
Chicago/Turabian StyleYang, Manzhi, Xiaodong Zhang, Chuanwei Zhang, Hongzhang Wu, and Yizhi Yang. 2022. "Design and Performance Research of a Precision Micro-Drive Reduction System without Additional Motion" Micromachines 13, no. 10: 1636. https://doi.org/10.3390/mi13101636