
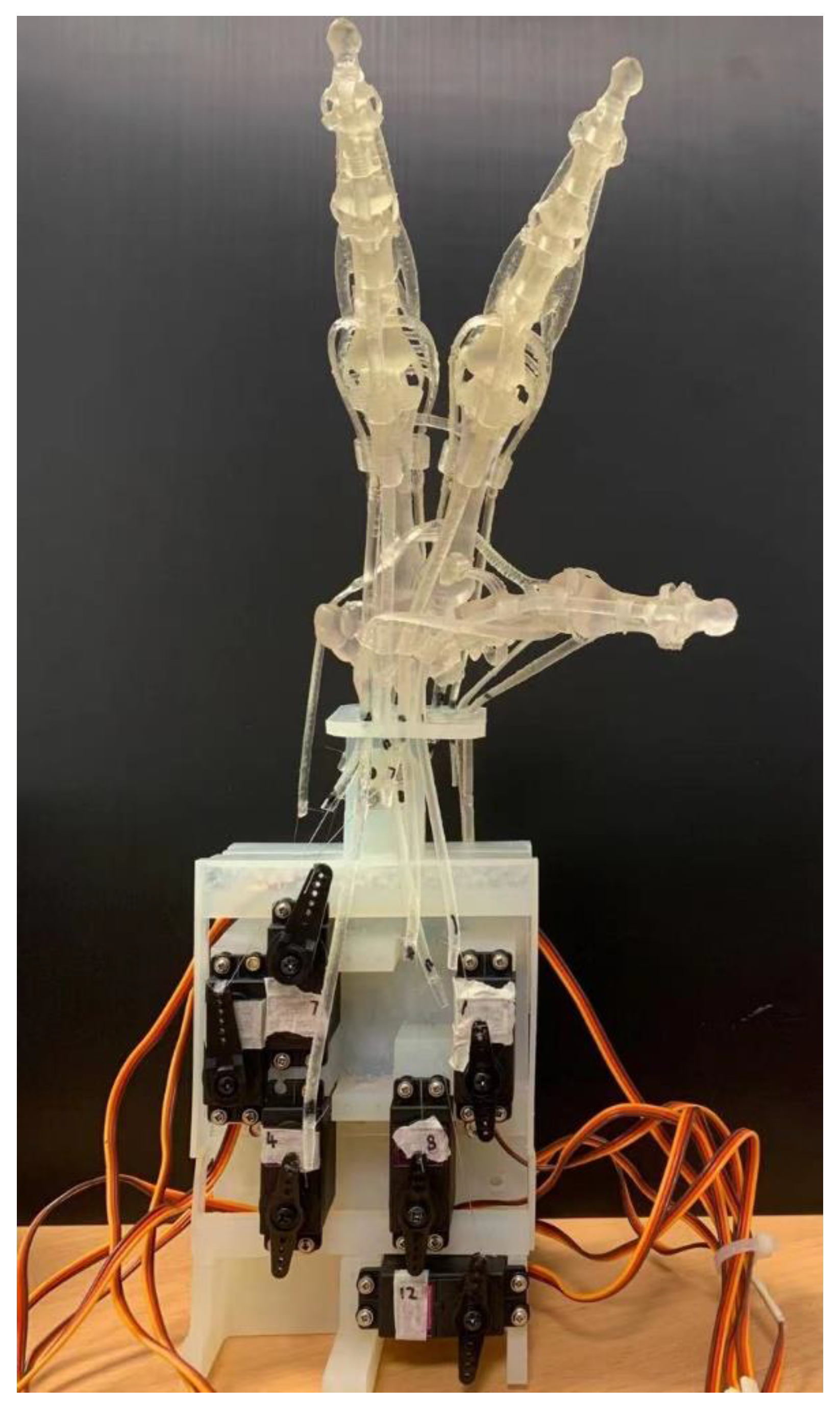
Design of a Single-Material Complex Structure Anthropomorphic Robotic Hand

 , ,
, ,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
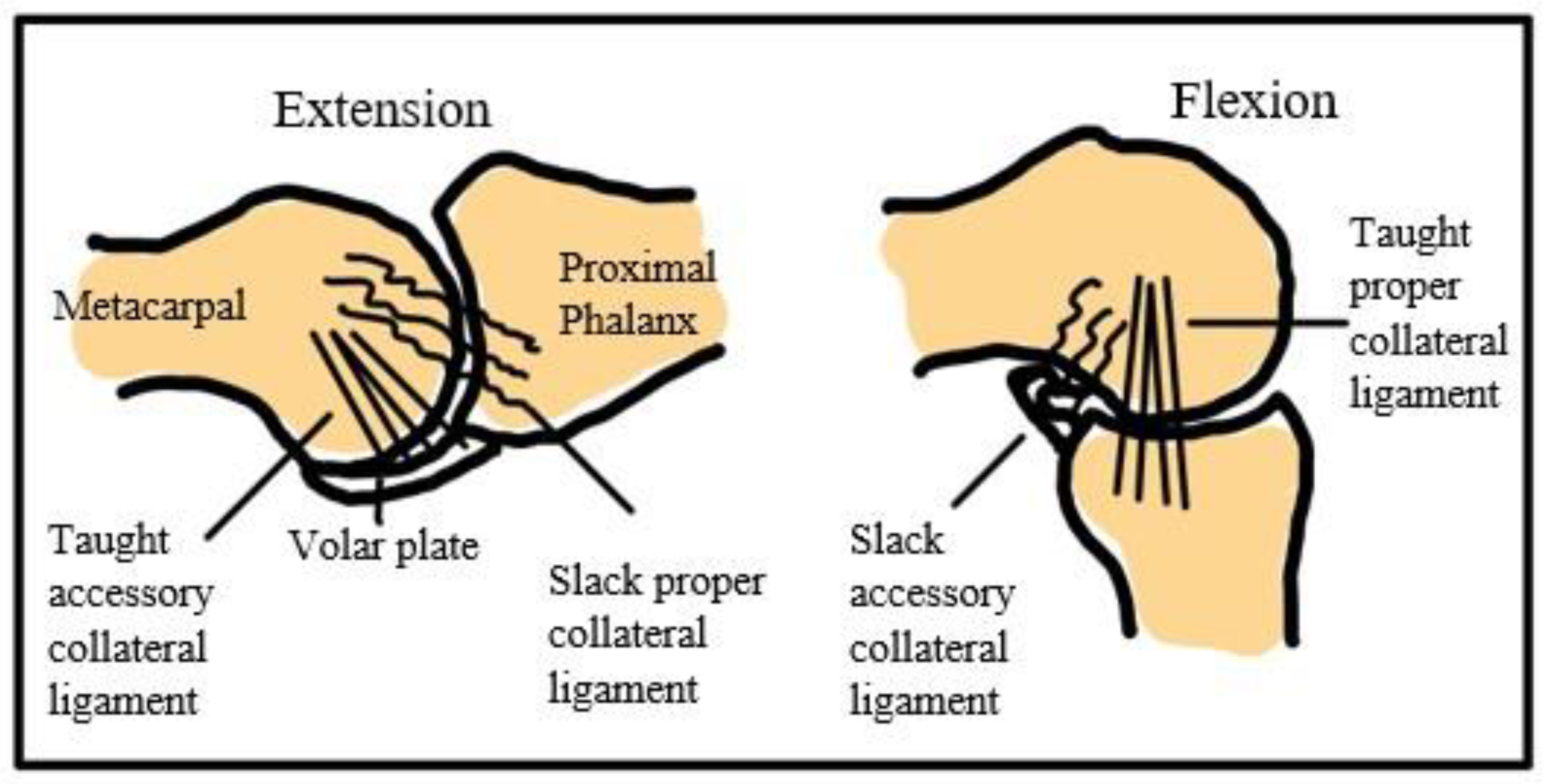
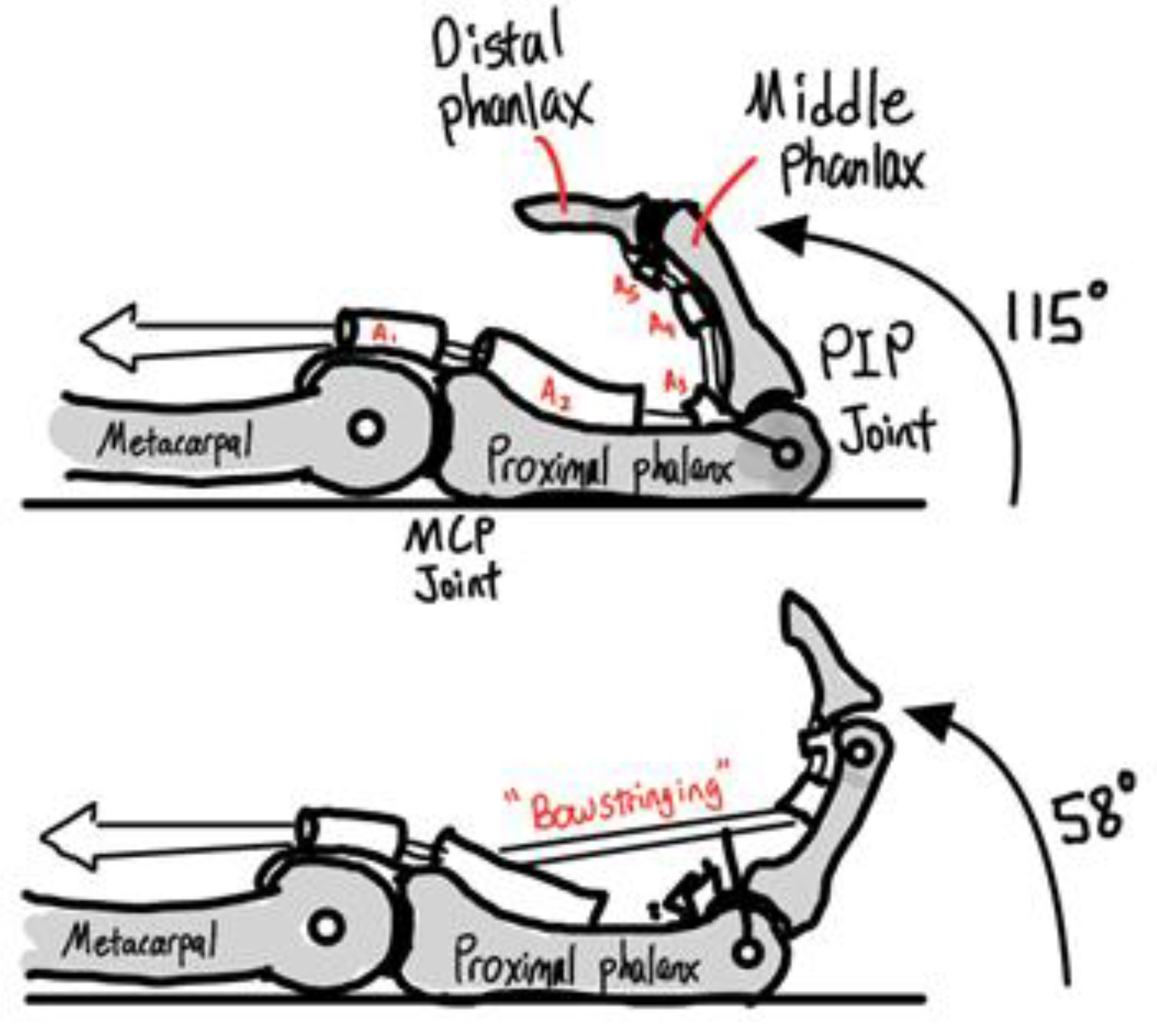
2.1. Biological Finger Joint
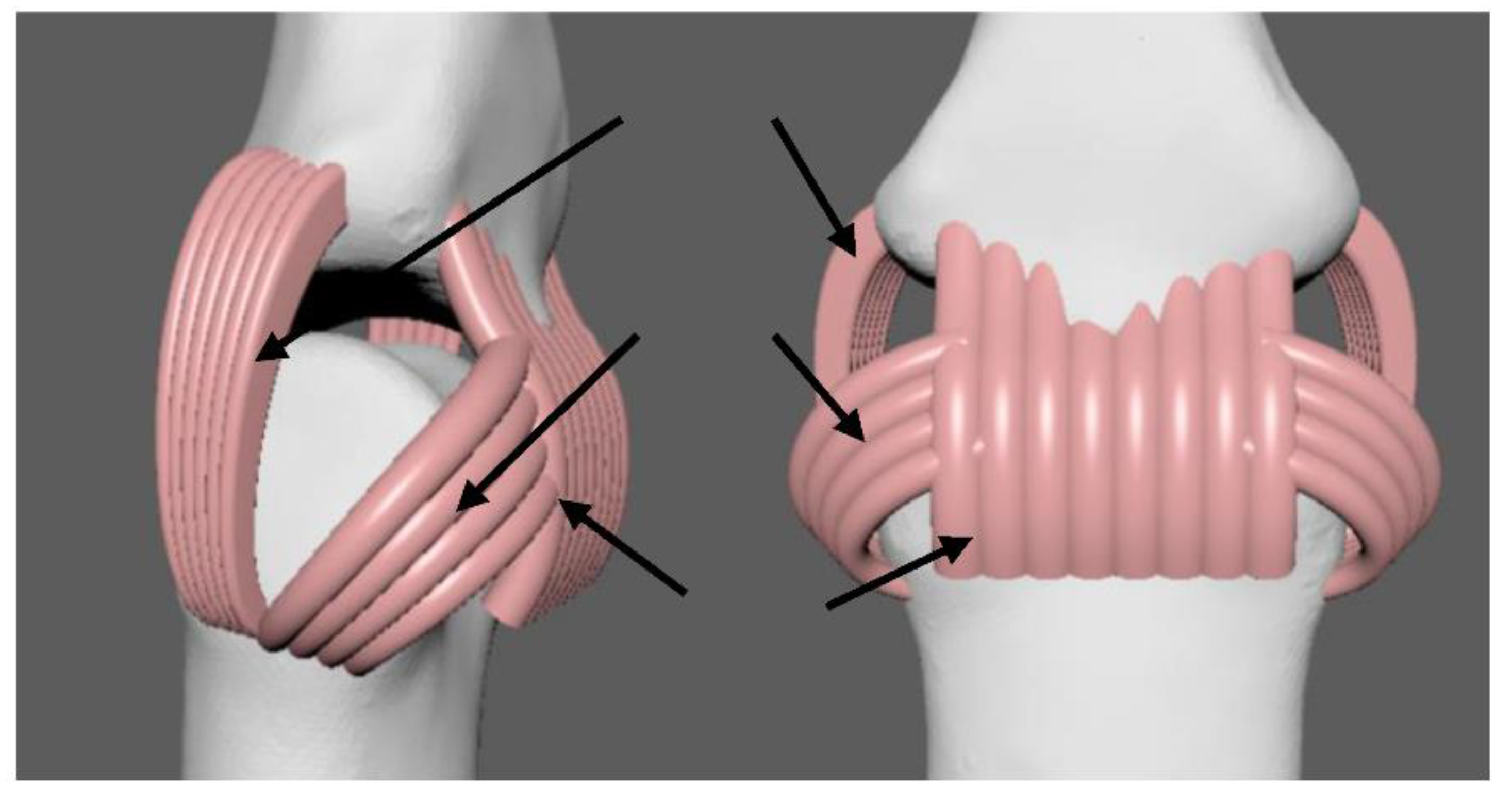
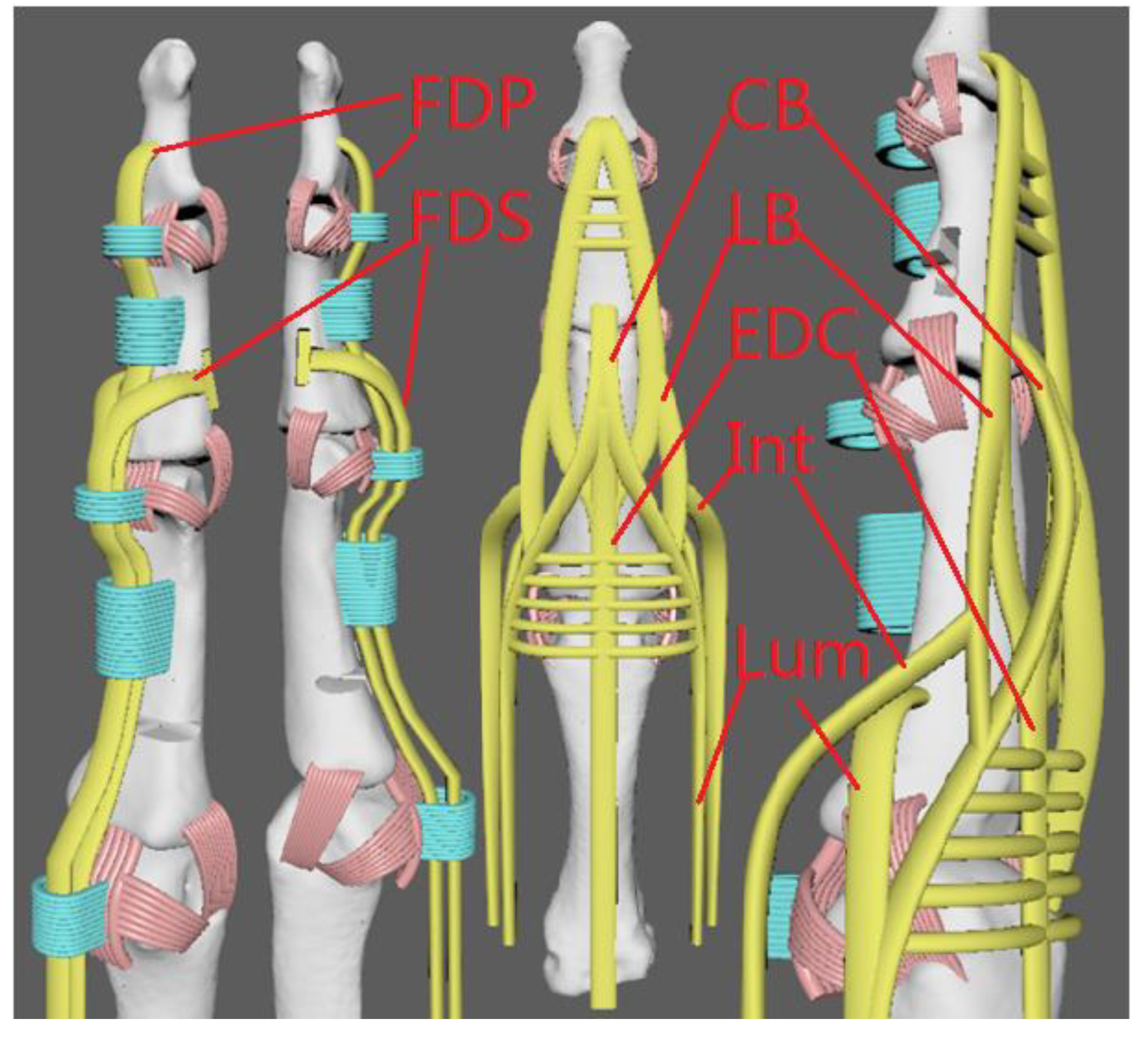
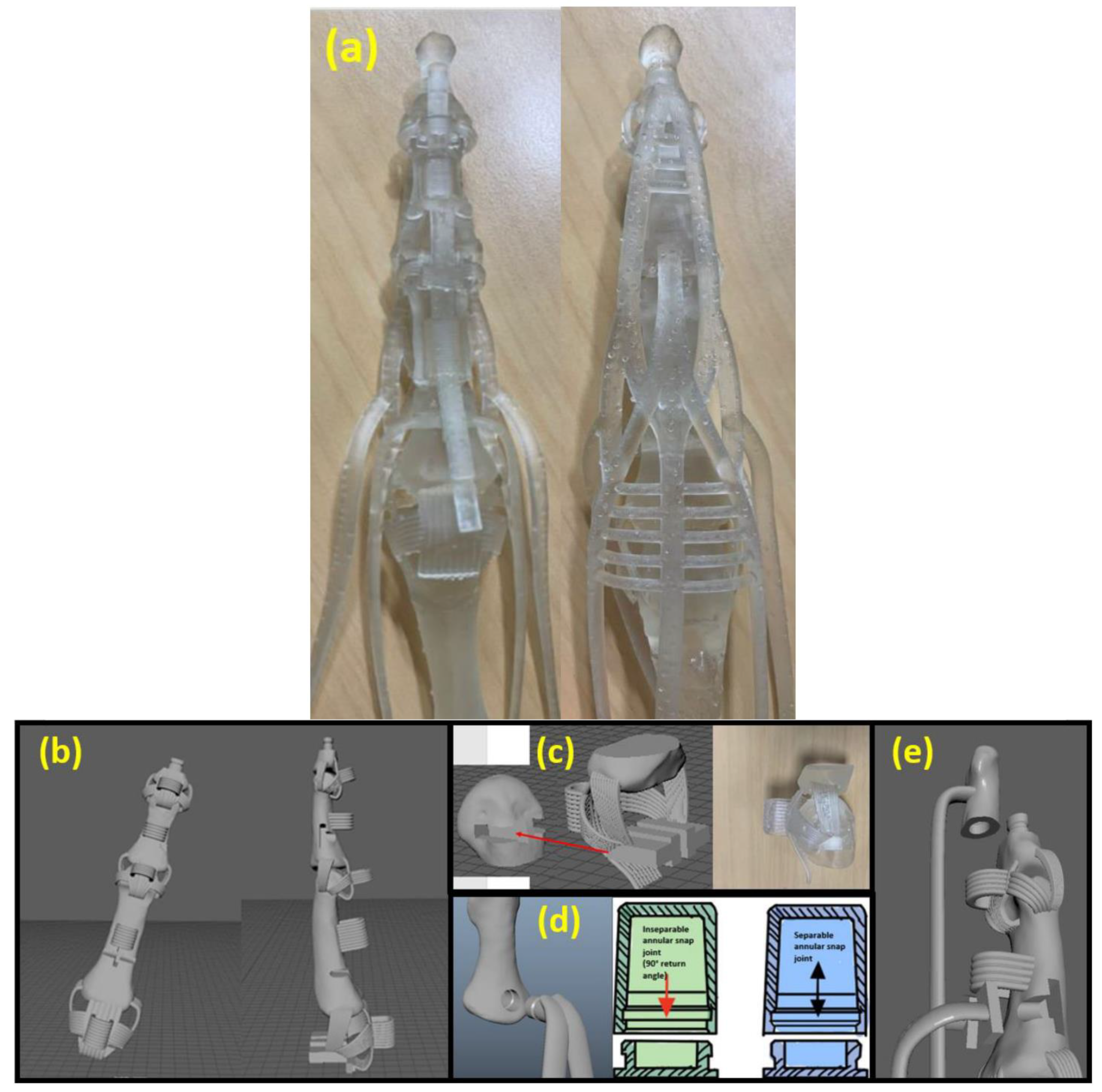
2.2. Biomechanical Transmission System
- Simple input as actuation (requires prime mover to pull the tendon to move the fingers);
- Lightweight (lack of gears and mechanisms allows a lighter design);
- Soft material (compliant and safer);
- Single material (easy to manufacture);
- Bio mimetic (more natural to view and use).
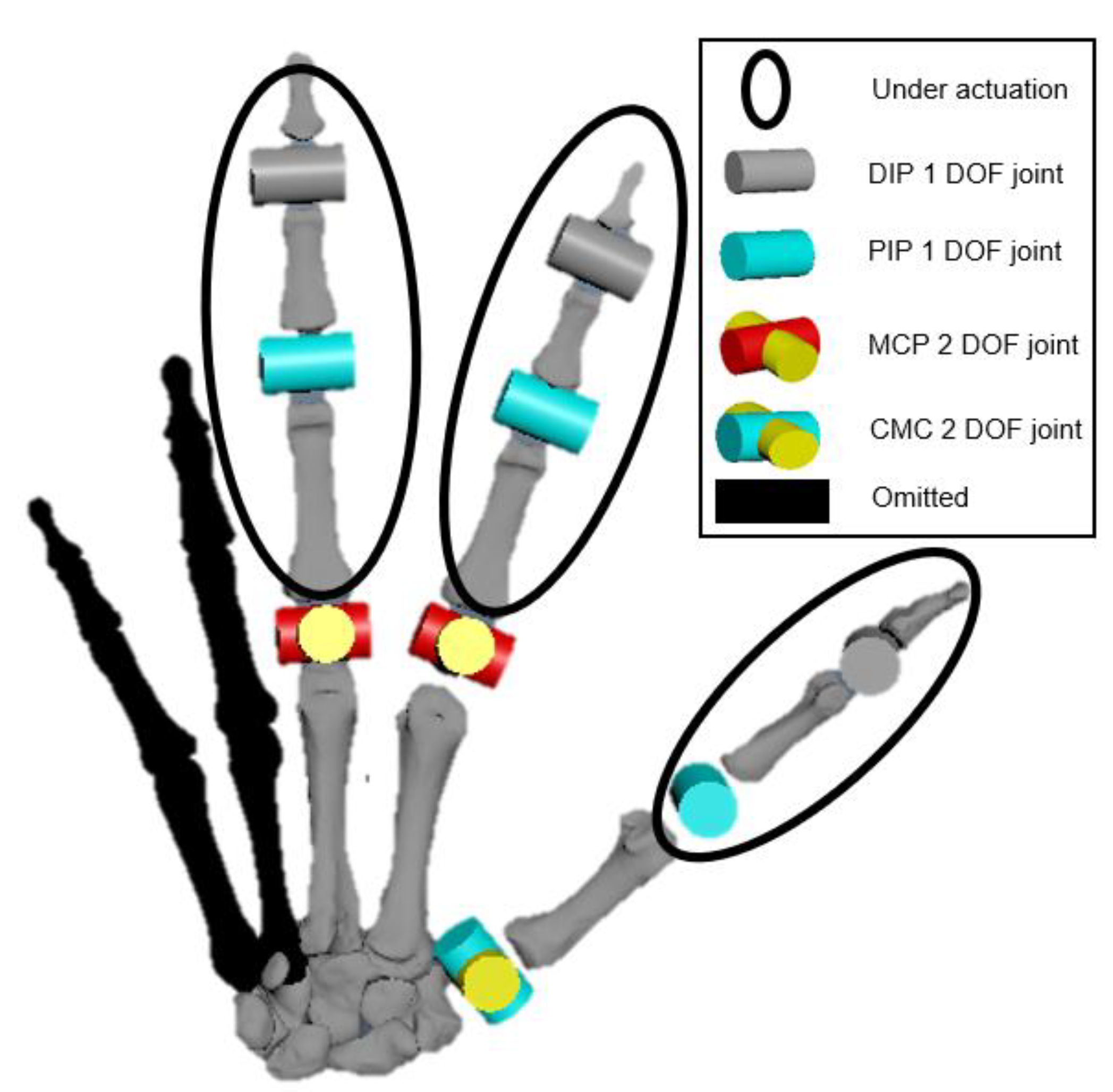
2.3. Dynamic Mode and Actuation System
3. Experiments
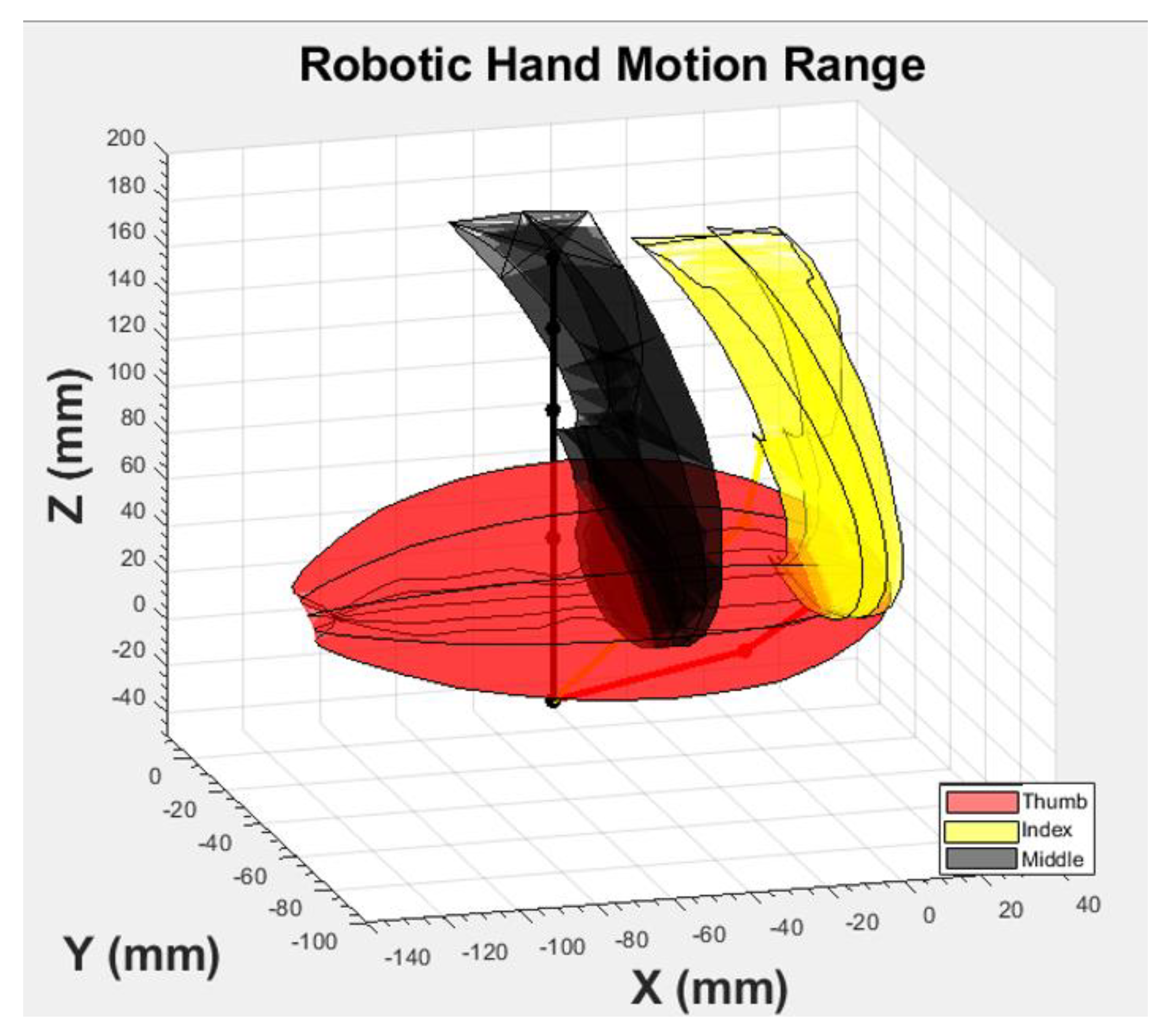
3.1. Trajectories of the Fingers
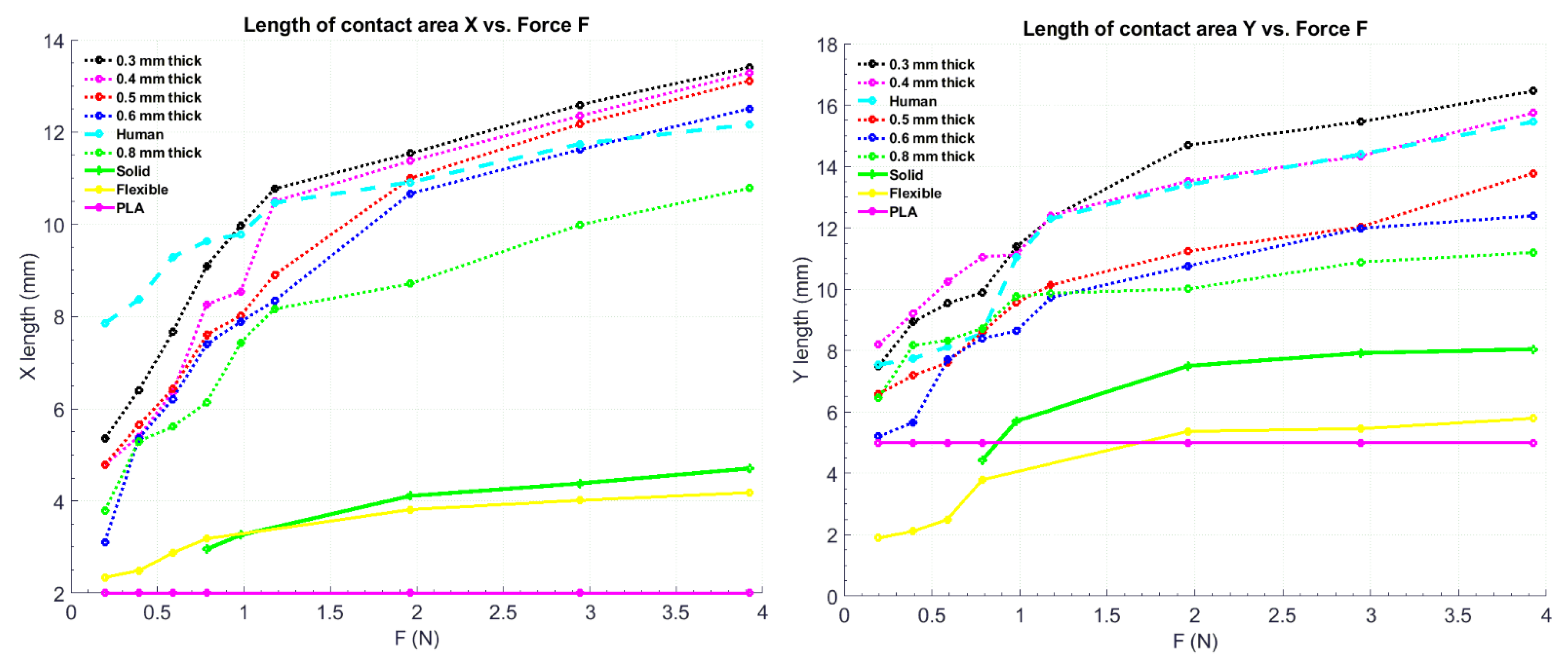
3.2. Grasping Test
4. Conclusions and Future Works
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Agur, A.M.; Dalley, A.F. Grant’s Atlas of Anatomy; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2009. [Google Scholar]
- Piazza, C.; Grioli, G.; Catalano, M.; Bicchi, A. A Century of Robotic Hands. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 1–32. [Google Scholar] [CrossRef]
- Rothling, F.; Haschke, R.; Steil, J.J.; Ritter, H. Platform portable anthropomorphic grasping with the bielefeld 20-DOF shadow and 9-DOF TUM hand. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 2951–2956. [Google Scholar] [CrossRef] [Green Version]
- Adams, F.; Qiu, T.; Mark, A.; Fritz, B.; Kramer, L.; Schlager, D.; Wetterauer, U.; Miernik, A.; Fischer, P. Soft 3D-Printed Phantom of the Human Kidney with Collecting System. Ann. Biomed. Eng. 2016, 45, 963–972. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qiu, K.; Zhao, Z.; Haghiashtiani, G.; Guo, S.; He, M.; Su, R.; Zhu, Z.; Bhuiyan, D.B.; Murugan, P.; Meng, F.; et al. 3D Printed Organ Models with Physical Properties of Tissue and Integrated Sensors. Adv. Mater. Technol. 2017, 3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qiu, K.; Haghiashtiani, G.; McAlpine, M.C. 3D Printed Organ Models for Surgical Applications. Annu. Rev. Anal. Chem. 2018, 11, 287–306. [Google Scholar] [CrossRef]
- Chae, M.P.; Lin, F.; Spychal, R.T.; Hunter-Smith, D.J.; Rozen, W.M. 3D-Printed haptic “Reverse” models for preopera-tive planning in soft tissue reconstruction: A case report. Microsurgery 2015, 35, 148–153. [Google Scholar] [CrossRef]
- Rich, S.I.; Wood, R.J.; Majidi, C. Untethered soft robotics. Nat. Electron. 2018, 1, 102–112. [Google Scholar] [CrossRef]
- Shimawaki, S.; Sakai, N. Quasi-static Deformation Analysis of a Human Finger using a Three-dimensional Finite Element Model Constructed from CT Images. J. Environ. Eng. 2007, 2, 56–63. [Google Scholar] [CrossRef] [Green Version]
- Balasubramanian, R.; Santos, V.J. The Human Hand as an Inspiration for Robot Hand Development; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, e1707035. [Google Scholar] [CrossRef] [Green Version]
- Deimel, R.; Brock, O. A Novel Type of Compliant, Underactuated Robotic Hand for Dexterous Grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Yi, J.; Chen, X.; Liu, Z.; Wang, Z. BCL-13: A 13-DOF Soft robotic hand for dexterous grasping and in-hand ma-nipulation. IEEE Robot. Autom. Lett. 2018, 3, 3379–3386. [Google Scholar] [CrossRef]
- Laschi, C.; Cianchetti, M.; Mazzolai, B.; Margheri, L.; Follador, M.; Dario, P. Soft Robot Arm Inspired by the Octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Kurumaya, S.; Nabae, H.; Endo, G.; Suzumori, K. Design of thin McKibben muscle and multifilament structure. Sens. Actuators A Phys. 2017, 261, 66–74. [Google Scholar] [CrossRef]
- Diteesawat, R.S.; Helps, T.; Taghavi, M.; Rossiter, J. Characteristic Analysis and Design Optimization of Bubble Artificial Muscles. Soft Robot. 2021, 8, 186–199. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Chen, X.; Chang, U.; Lu, J.-T.; Leung, C.C.Y.; Chen, Y.; Hu, Y.; Wang, Z. A Soft-Robotic Approach to Anthropomorphic Robotic Hand Dexterity. IEEE Access 2019, 7, 101483–101495. [Google Scholar] [CrossRef]
- Abondance, S.; Teeple, C.B.; Wood, R.J. A Dexterous Soft Robotic Hand for Delicate In-Hand Manipulation. IEEE Robot. Autom. Lett. 2020, 5, 5502–5509. [Google Scholar] [CrossRef]
- Lu, Q.; Rojas, N. On Soft Fingertips for In-Hand Manipulation: Modeling and Implications for Robot Hand Design. IEEE Robot. Autom. Lett. 2019, 4, 2471–2478. [Google Scholar] [CrossRef] [Green Version]
- Spiers, A.J.; Calli, B.; Dollar, A.M. Variable-Friction Finger Surfaces to Enable Within-Hand Manipulation via Gripping and Sliding. IEEE Robot. Autom. Lett. 2018, 3, 4116–4123. [Google Scholar] [CrossRef]
- Low, J.H.; Lee, W.W.; Khin, P.M.; Thakor, N.V.; Kukreja, S.L.; Ren, H.L.; Yeow, C.H. Hybrid Tele-Manipulation System Using a Sensorized 3-D-Printed Soft Robotic Gripper and a Soft Fabric-Based Haptic Glove. IEEE Robot. Autom. Lett. 2017, 2, 880–887. [Google Scholar] [CrossRef]
- Yap, H.K.; Ng, H.Y.; Yeow, C.-H. High-Force Soft Printable Pneumatics for Soft Robotic Applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 2011, 6, 036002. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scarcia, U. Design and Control of Robotic Hands; Alma Mater Studiorum Università di Bologn: Bologna, Italy, 2015. [Google Scholar]
- Deshpande, A.D.; Xu, Z.; Weghe, M.J.V.; Brown, B.H.; Ko, J.; Chang, L.Y.; Wilkinson, D.D.; Bidic, S.M.; Matsuoka, Y. Mechanisms of the Anatomically Correct Testbed Hand. IEEE/ASME Trans. Mechatron. 2011, 18, 238–250. [Google Scholar] [CrossRef]
- Xu, Z.; Todorov, E. Design of a Highly Biomimetic Anthropomorphic Robotic Hand towards Artificial Limb Regeneration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3485–3492. [Google Scholar]
- Faudzi, A.A.M.; Ooga, J.; Goto, T.; Takeichi, M.; Suzumori, K. Index Finger of a Human-Like Robotic Hand Using Thin Soft Muscles. IEEE Robot. Autom. Lett. 2017, 3, 92–99. [Google Scholar] [CrossRef]
- Tasi, B.J.; Koller, M.; Cserey, G. Design of the Anatomically Correct, Biomechatronic Hand. arXiv 2019, arXiv:1909.07966. [Google Scholar]
- Hughes, J.; Maiolino, P.; Iida, F. An anthropomorphic soft skeleton hand exploiting conditional models for piano playing. Sci. Robot. 2018, 3, eaau3098. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tian, L.; Li, H.; Wang, Q.; Du, X.; Tao, J.; Chong, J.S.; Thalmann, N.M.; Zheng, J. Towards Complex and Continuous Manipulation: A Gesture Based Anthropomorphic Robotic Hand Design. IEEE Robot. Autom. Lett. 2021, 6, 5461–5468. [Google Scholar]
- Tian, L.; Li, H.; Halil, M.F.K.B.A.; Thalmann, N.M.; Thalmann, D.; Zheng, J. Fast 3D Modeling of Anthropomorphic Robotic Hands Based on A Multi-layer Deformable Design. arXiv 2020, arXiv:2011.03742. [Google Scholar]
- She, Y.; Li, C.; Cleary, J.; Su, H.-J. Design and Fabrication of a Soft Robotic Hand with Embedded Actuators and Sensors. J. Mech. Robot. 2015, 7, 021007. [Google Scholar] [CrossRef]
- Tian, L.; Liu, J.; Thalmann, N.M.; Thalmann, D.; Zheng, J. Design of a Flexible Articulated Robotic Hand for a Humanoid Robot. In Proceedings of the 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Toronto, ON, Canada, 15–17 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 572–577. [Google Scholar]
- Mattar, E. A survey of bio-inspired robotics hands implementation: New directions in dexterous manipulation. Robot. Auton. Syst. 2013, 61, 517–544. [Google Scholar] [CrossRef]
- Angin, S.; Simsek, I. Comparative Kinesiology of the Human Body: Normal and Pathological Conditions; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Martin, R.B.; Burr, D.B.; Sharkey, N.A.; Fyhrie, D.P. Mechanical properties of ligament and tendon. In Skeletal Tissue Mechanics; Springer: Berlin/Heidelberg, Germany, 2015; pp. 175–225. [Google Scholar]
- An, K.; Chao, E.; Cooney, W.; Linscheid, R. Normative model of human hand for biomechanical analysis. J. Biomech. 1979, 12, 775–788. [Google Scholar] [CrossRef]
- Schmidt, H.-M.; Lanz, U. Surgical Anatomy of the Hand; Thieme: New York, NY, USA, 2011. [Google Scholar]
- Neumann, D. Kinesiology of the Musculoskeletal System; Elsevier: St. Louis, MO, USA, 2010. [Google Scholar]
- Akkaya, I.; Andrychowicz, M.; Chociej, M.; Litwin, M.; McGrew, B.; Petron, A.; Paino, A.; Plappert, M.; Powell, G.; Ribas, R.; et al. Solving rubik’s cube with a robot hand. arXiv 2019, arXiv:1910.07113. [Google Scholar]
- Lin, J.; Wu, Y.; Huang, T. Modeling the constraints of human hand motion. In Proceedings of the Proceedings Workshop on Human Motion, Austin, TX, USA, 7–8 December 2000; pp. 121–126. [Google Scholar] [CrossRef] [Green Version]
- Landsmeer, J. Studies in the anatomy of articulation. I. The equilibrium of the “intercalated” bone. Acta Morphol. Neer-Lando-Scand. 1961, 3, 287. [Google Scholar]
- Brook, N.; Mizrahi, J.; Shoham, M.; Dayan, J. A biomechanical model of index finger dynamics. Med. Eng. Phys. 1995, 17, 54–63. [Google Scholar] [CrossRef]
- Feix, T.; Romero, J.; Schmiedmayer, H.-B.; Dollar, A.M.; Kragic, D. The grasp taxonomy of human grasp types. IEEE Trans. Hum. -Mach. Syst. 2016, 46, 66–77. [Google Scholar] [CrossRef]
- Verywellhealth. Generally Accepted Values for Normal Range of Motion (ROM) in Joints [Online]. Available online: https://www.verywellhealth.com/what-is-normal-range-of-motion-in-a-joint-3120361 (accessed on 16 September 2021).
- OrthopaedicsOne. Carpometacarpal Joint [Online]. Available online: https://www.orthopaedicsone.com/x/ygPbB (accessed on 20 March 2012).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Representative Product | Appearance | Actuated Method | Joint | Tendon | Pulley System |
|---|---|---|---|---|---|---|
| Traditional | Shadow hand [3] | Mechanical rigid | Electric motor | Metal pin-joint | Thread | Rigid structure, robust |
| Highly biometric | Xu Zhe’s robotic hand [28] | Bones based | Electric motor | Crocheted ligament | Nylon thread | Laser-cut rubber sheet |
| Soft material | RBO hand [13] | Streamlined cylinder | Pneumatic/Fluidic motor | No | Curl | Soft body, big actuation system |
| Soft material + Soft actuator | Yu She’s robotic hand [34] | Streamlined cylinder | Soft actuator (Shape memory alloy) | No | Curl | Soft body, Small grip force |
| flexible surface + rigid palm bones | Nadine hand V4 [35] | Hand shape | Electric motor | Flexible pin-joint | Turn | Soft body, weak in joint structure |
| Highly biometric | Nadine hand V5 [32] | Hand shape (capable with silicone skin) | Electric motor | Bone-joint | Turn | Soft body, rigid bones |
| Single material | The proposed design | Hand shape (capable with silicone skin) | Electric motor | Soft bone-Joint | Turn | Soft body, soft bones |
| Formlabs Flexible FLGR02 | Formlabs Elastic RS-F2-ELCL-01 | Rubber Band | Human Ligament [38] | |
|---|---|---|---|---|
| Elongation | 120% | 160% | 750–850% | 68% |
| Tensile Strength | 7.7–8.5 MPa | 3.2 MPa | 20–30 MPa | 50–150 MPa |
| Hardness | 80–85 A | 50 A | 20–30 A | N.A. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, L.; Zheng, J.; Magnenat Thalmann, N.; Li, H.; Wang, Q.; Tao, J.; Cai, Y. Design of a Single-Material Complex Structure Anthropomorphic Robotic Hand. Micromachines 2021, 12, 1124. https://doi.org/10.3390/mi12091124
Tian L, Zheng J, Magnenat Thalmann N, Li H, Wang Q, Tao J, Cai Y. Design of a Single-Material Complex Structure Anthropomorphic Robotic Hand. Micromachines. 2021; 12(9):1124. https://doi.org/10.3390/mi12091124
Chicago/Turabian StyleTian, Li, Jianmin Zheng, Nadia Magnenat Thalmann, Hanhui Li, Qifa Wang, Jialin Tao, and Yiyu Cai. 2021. "Design of a Single-Material Complex Structure Anthropomorphic Robotic Hand" Micromachines 12, no. 9: 1124. https://doi.org/10.3390/mi12091124