
A Mutual Capacitance Touch Readout IC with Synchronization in Touch and Mobile Display Driving for High Refresh Rate AMOLED Panels

Abstract
:1. Introduction
2. Proposed Differential Sensing Scheme
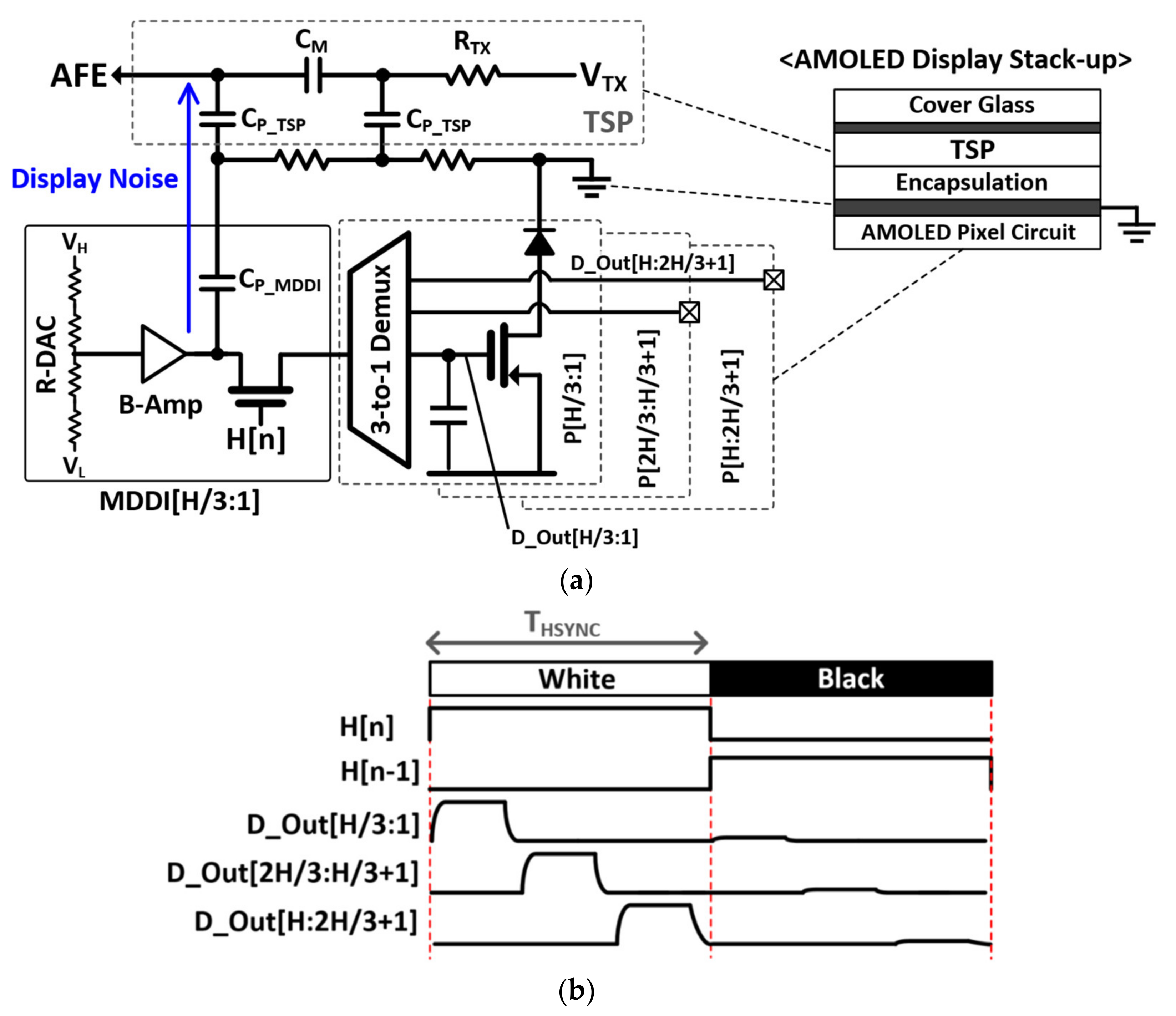
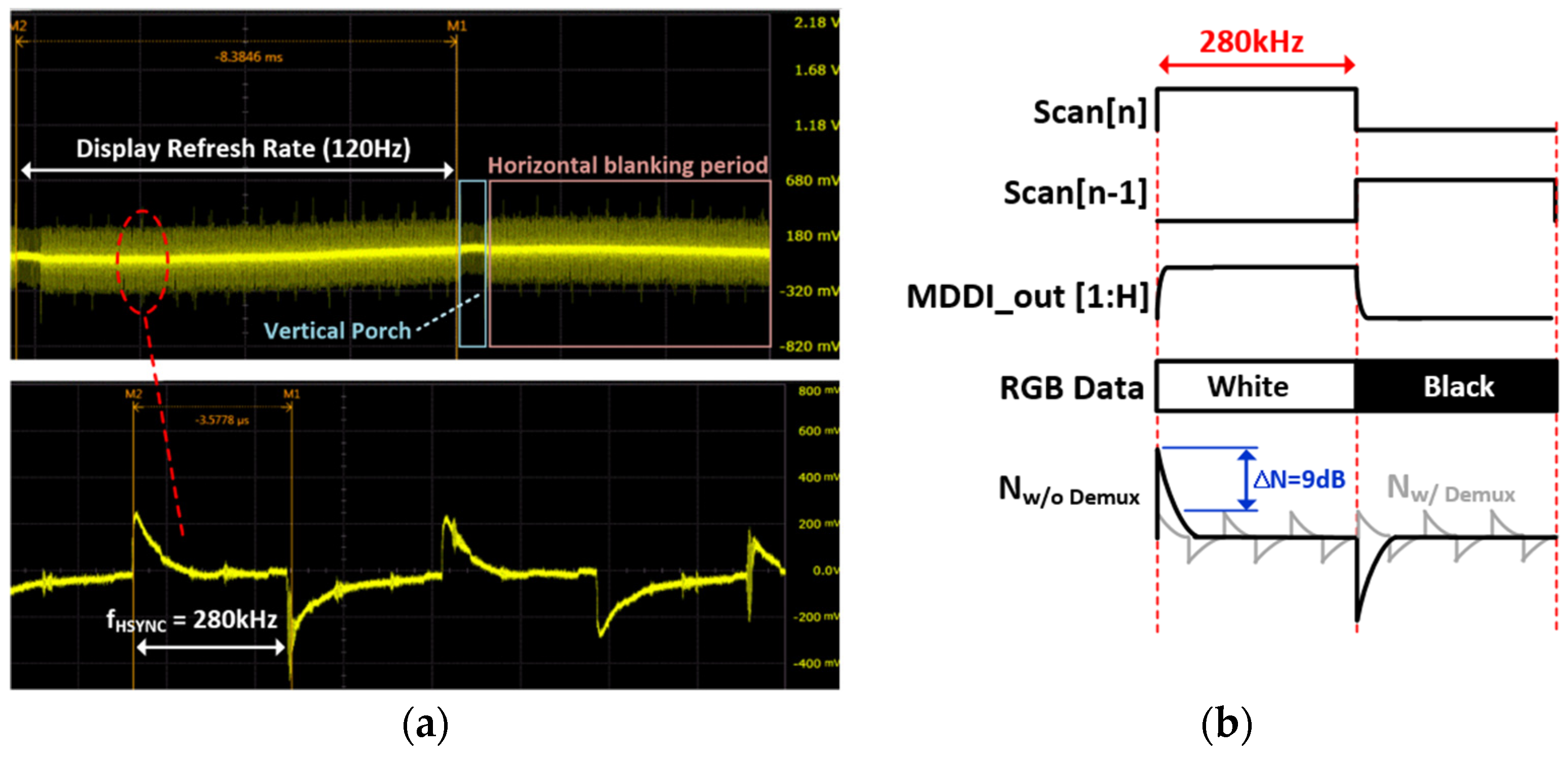
2.1. Display Noise Measurement
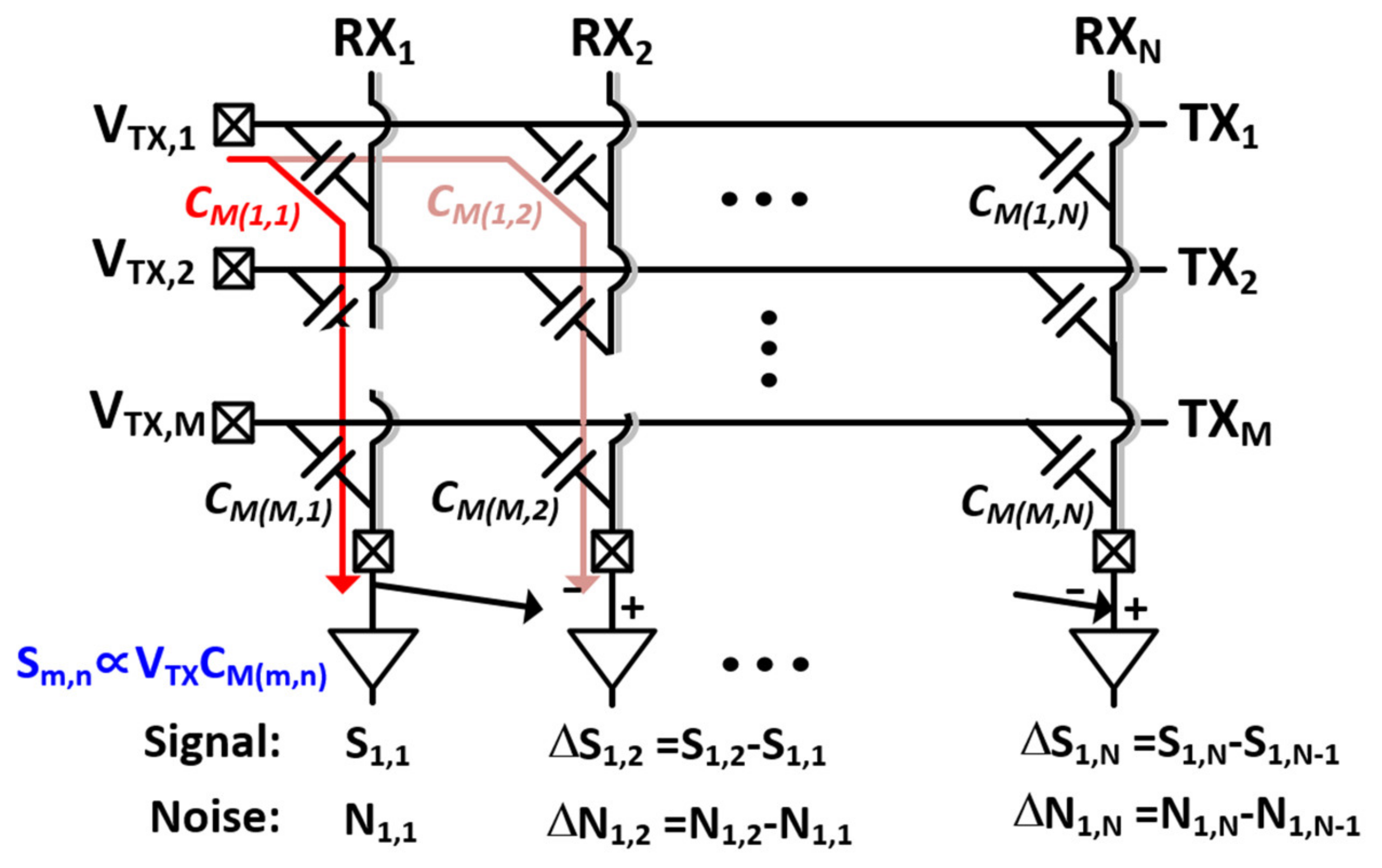
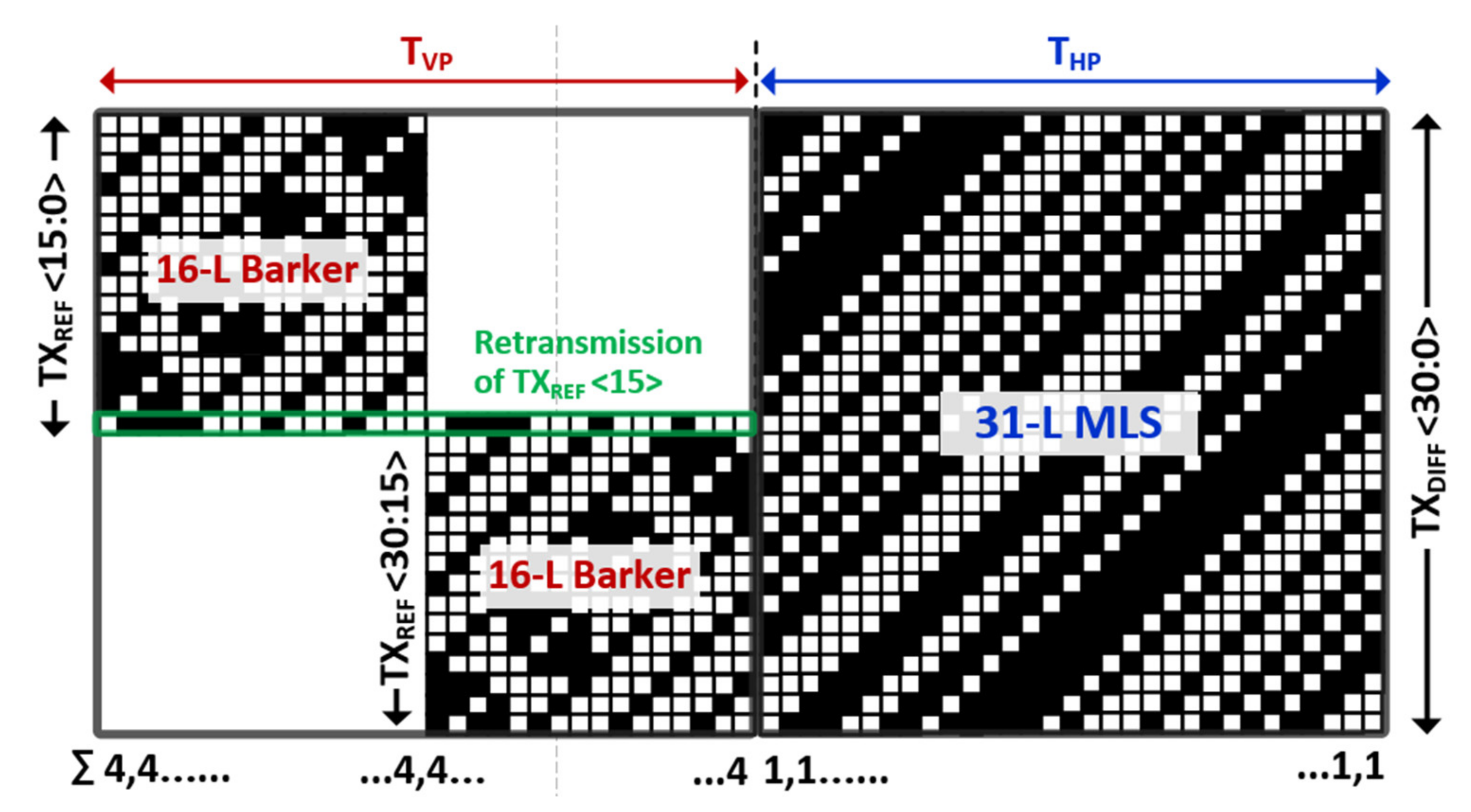
2.2. Basic Principle of Differential Sensing
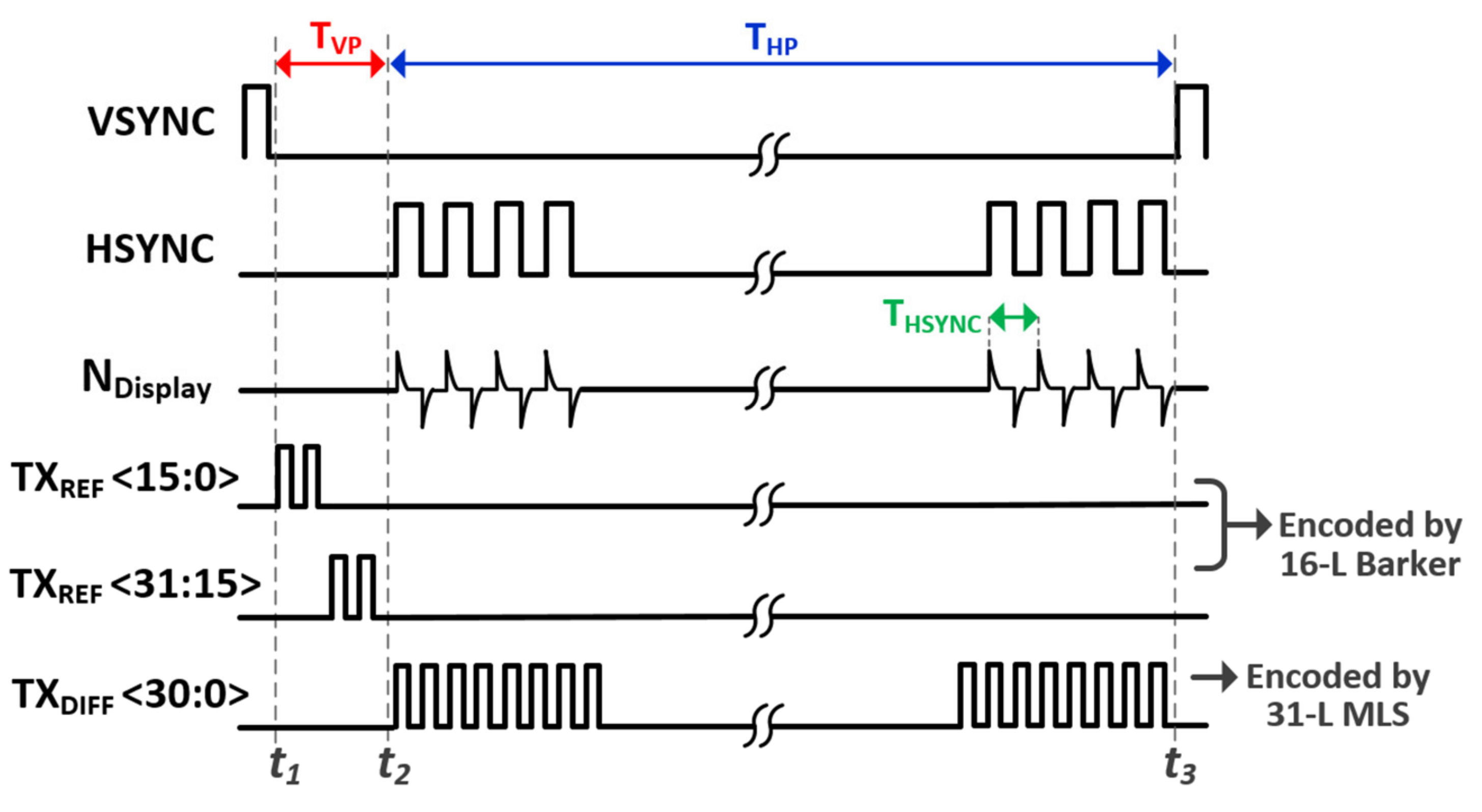
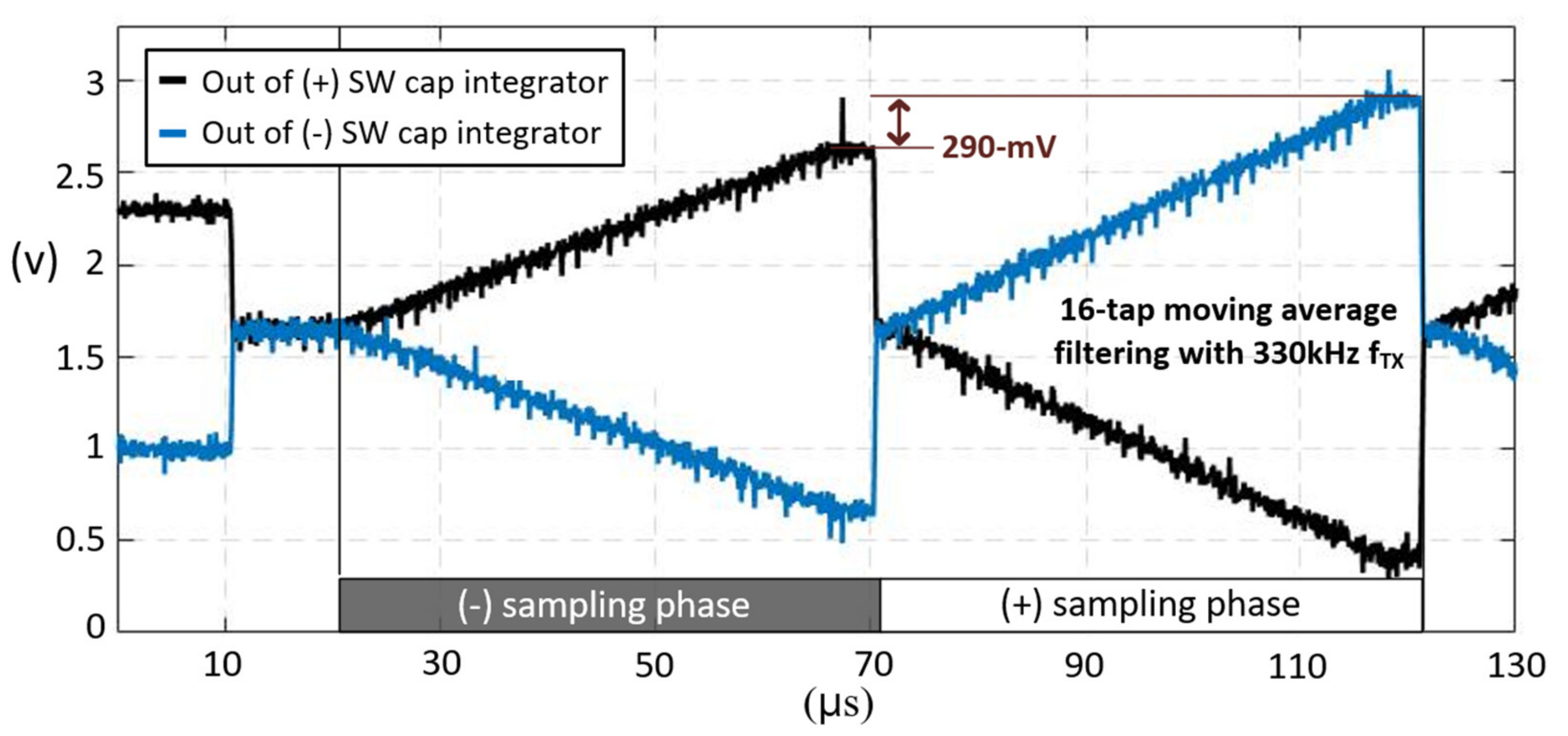
2.3. Detailed Operation of the Proposed Scheme
3. Circuit Implementations
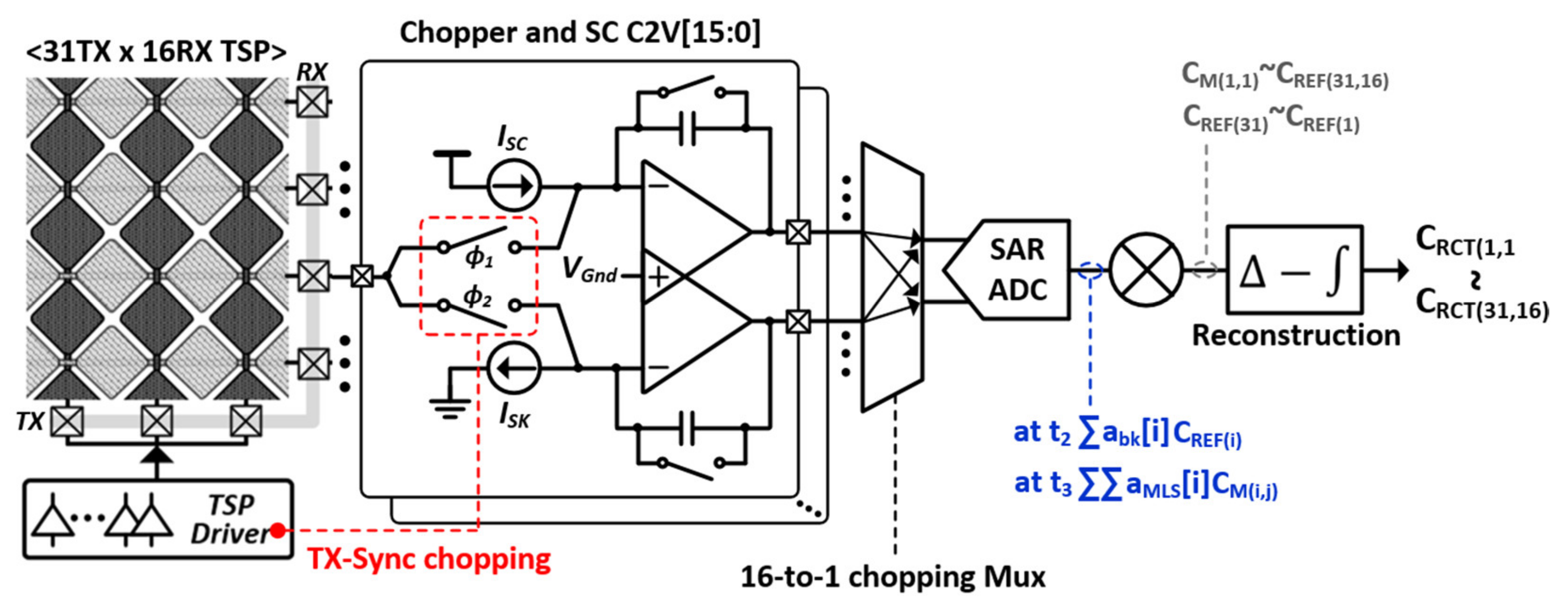
3.1. Whole Readout System Architecture
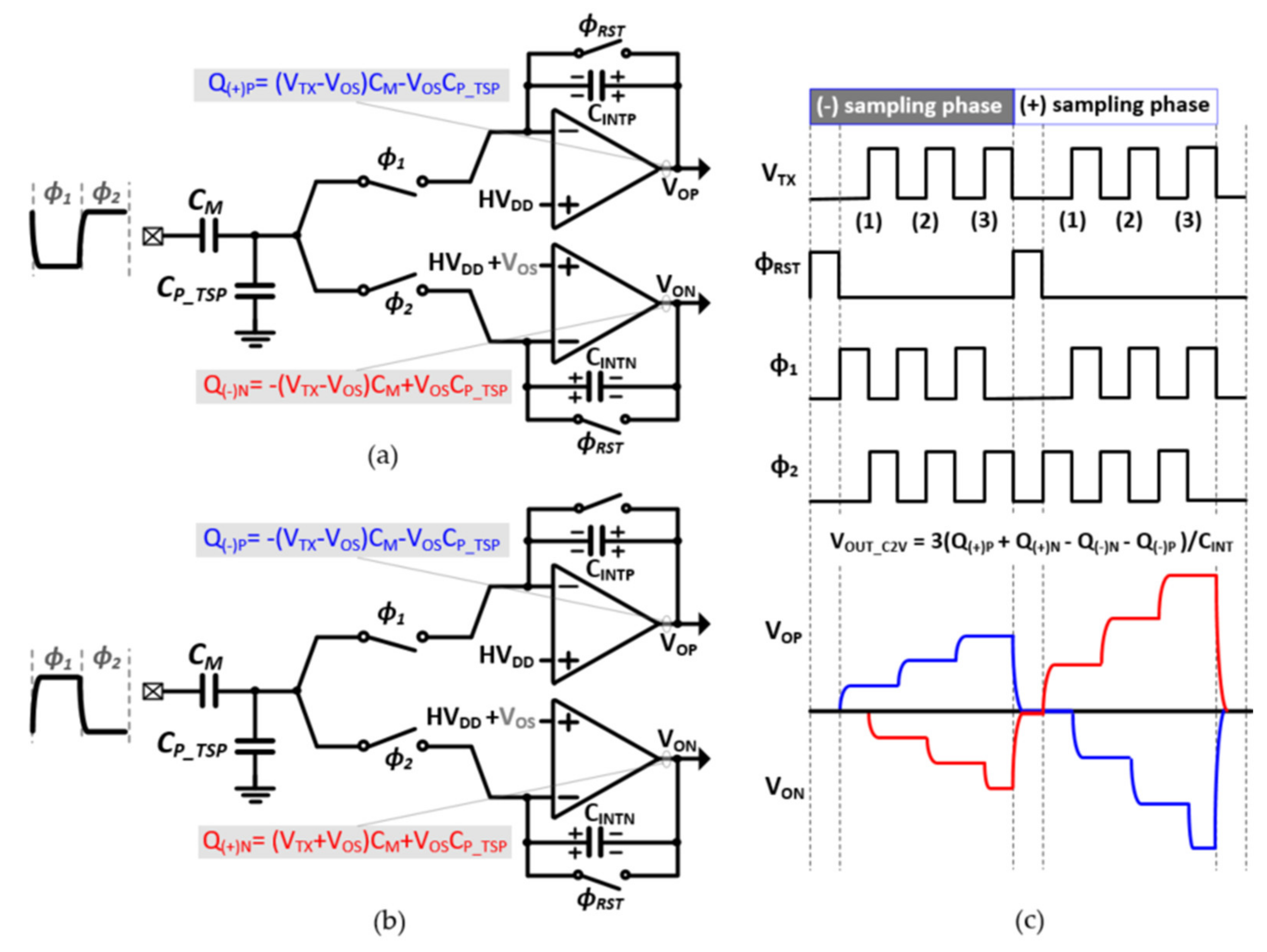
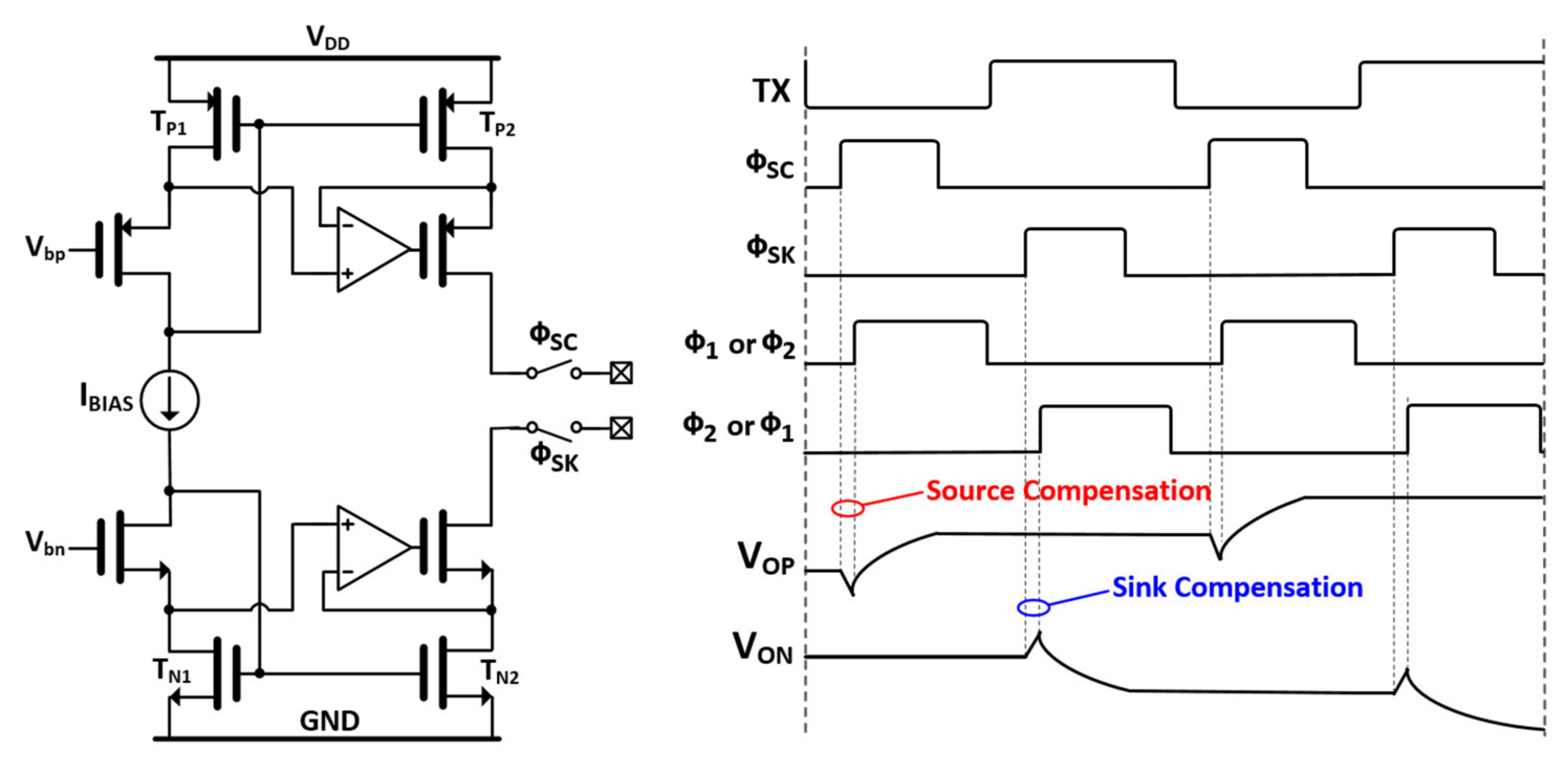
3.2. Input Offset Cancellation and Capacitance Compensation Techniques
4. Result and Discussion
5. Conclusions
Funding
Conflicts of Interest
References
- Galaxy S21 Ultra 5G. Available online: https://www.samsung.com/global/galaxy/galaxy-s21-ultra-5g/specs/ (accessed on 19 June 2021).
- Galaxy Tab S7. Available online: https://www.samsung.com/global/galaxy/galaxy-tab-s7/ (accessed on 19 June 2021).
- How Do You Use Always on Display Mode on Galaxy S20, S20+, S20 Ultra, and Z Flip? Available online: https://www.samsung.com/global/galaxy/what-is/always-on-display/ (accessed on 19 June 2021).
- David, W. Capacitive Sensing: Ins and Outs of Active Shielding. Available online: https://www.ti.com/lit/an/snoa926a/snoa926a.pdf?ts=1627473795125&ref_url=https%253A%252F%252Fwww.google.com%252F (accessed on 25 July 2021).
- Kim, H.R.; Choi, Y.-K.; Byun, S.-H.; Kim, S.-W.; Choi, K.-H.; Ahn, H.-Y.; Park, J.-K.; Lee, D.-Y.; Cho, H.-H.; Yu, J.-S.; et al. A Mobile-Display-Driver IC Embedding a Capacitive-Touch-Screen Controller System. In Proceedings of the International Solid–State Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 7–11 February 2010; pp. 114–116. [Google Scholar]
- Hotelling, S.P.; Krah, C.H.; Huppi, B.Q. Multipoint Touch Surface Controller. U.S. Patent 8 279 180, 2 October 2012. [Google Scholar]
- Huang, S.-L.; Hung, S.-Y.; Chen, C.-P. Frequency hopping and parallel driving with random delay especially suitable for the charger noise problem in mutual–capacitive touch applications. IEEE Access 2018, 7, 3980–3993. [Google Scholar] [CrossRef]
- Park, J.-E.; Lim, D.-H.; Jeong, D.-K. A reconfigurable 40–to–67 dB SNR, 50–to–6400 Hz frame–rate, column–parallel readout IC for capacitive touch–screen panels. IEEE J. Solid-State Circuits 2014, 49, 2305–2318. [Google Scholar] [CrossRef]
- Hamaguchi, M.; Nago, A.; Miyamoto, M. A 240 Hz–Reporting Rate 143 × 81 Mutual-Capacitance Touch–Sensing Analog Front–End IC with 37 dB SNR for 1 mm–diameter Stylus. In Proceedings of the International Solid–State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 9–13 February 2014; pp. 214–216. [Google Scholar]
- Kim, K.-D.; Kang, S.; Choi, Y.-K.; Lee, K.-H.; Lee, J.-C.; Choi, M.; Ko, K.; Jung, J.; Park, N.; Park, H.; et al. A Fully–Differential Capacitive Touch Controller with Input Common–Mode Feedback for Symmetric Display Noise Cancellation. In Proceedings of the IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 10–13 June 2014; pp. 1–2. [Google Scholar]
- Lee, C.-J.; Park, J.K.; Seo, H.-E.; Huh, J.; Chun, J.-H. Fully differential touch screen controller with wide input dynamic range for thin displays. Sensors 2020, 20, 837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Klein, K. Noise Immunity of Touchscreen Devices. Available online: http://www.cypress.com/file/120641/download (accessed on 25 July 2021).
- Nam, H.; Seol, K.-H.; Lee, J.; Cho, H.; Jung, S.W. Review of capacitive touchscreen technologies: Overview, research trends, and machine learning approaches. Sensors 2021, 21, 4776. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.-J.; Park, J.; Seo, H.-E.; Huh, J.; Chun, J.-H. A mutual capacitance touch readout IC with 64% reduced-power adiabatic driving over heavily coupled touch ccreen. IEEE J. Solid-State Circuits 2019, 54, 1694–1704. [Google Scholar]
- Park, J.-E.; Park, J.; Hwang, Y.-H.; Oh, J.; Jeong, D.-K. A noise–immunity–enhanced analog front–end for 36 × 64 touch–screen controllers with 20–VPP noise tolerance at 100 kHz. IEEE J. Solid State Circuits 2019, 54, 1497–1510. [Google Scholar] [CrossRef]
- Ko, S. A–24 dB in-band noise-immunity mutual capacitance readout system for variable refresh rate of active-matrix OLED display. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 1126–1135. [Google Scholar] [CrossRef]
- Dinan, E.H.; Jabbari, B. Spreading codes for direct sequence CDMA and wideband CDMA cellular networks. IEEE Commun. Mag. 1998, 36, 48–54. [Google Scholar] [CrossRef]
- Shin, H.; Ko, S.; Jang, H.; Yun, I.; Lee, K. A 55 dB SNR with 240 Hz Frame Scan Rate Mutual Capacitor 30 × 24 Touch–Screen Panel Read–Out IC Using Code-Division Multiple Sensing Technique. In Proceedings of the International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 17–21 February 2013; pp. 388–390. [Google Scholar]
- Golomb, S.W.; Scholtz, R.A. Generalized barker sequences. IEEE Trans. Inf. Theory 1965, 11, 533–537. [Google Scholar] [CrossRef]
- Ko, S. An Automatic Ear Detection Technique in Capacitive Sensing Readout IC Using Cascaded Classifiers and Hovering Function. In Proceedings of the Symposium on VLSI Circuits, Kyoto, Japan, 9–14 June 2019. [Google Scholar]
- Ko, S.; Shin, H.; Lee, J.; Jang, H.; So, B.-C.; Yun, I.; Lee, K. Low Noise Capacitive Sensor for Multi–Touch Mobile Handset’s Applications. In Proceedings of the Asian Solid-State Circuits Conference, Beijing, China, 8–10 November 2010; pp. 1–4. [Google Scholar]
- Lee, C.-J.; Park, J.K.; Piao, C.; Seo, H.-E.; Choi, J.; Chun, J.-H. Mutual capacitive touch screen controller for ultrathin display with extended signal passband using negative capacitance. Sensors 2018, 18, 3637. [Google Scholar] [CrossRef] [PubMed] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| This Work | Ref. [14] | Ref. [15] | Ref. [22] | |
|---|---|---|---|---|
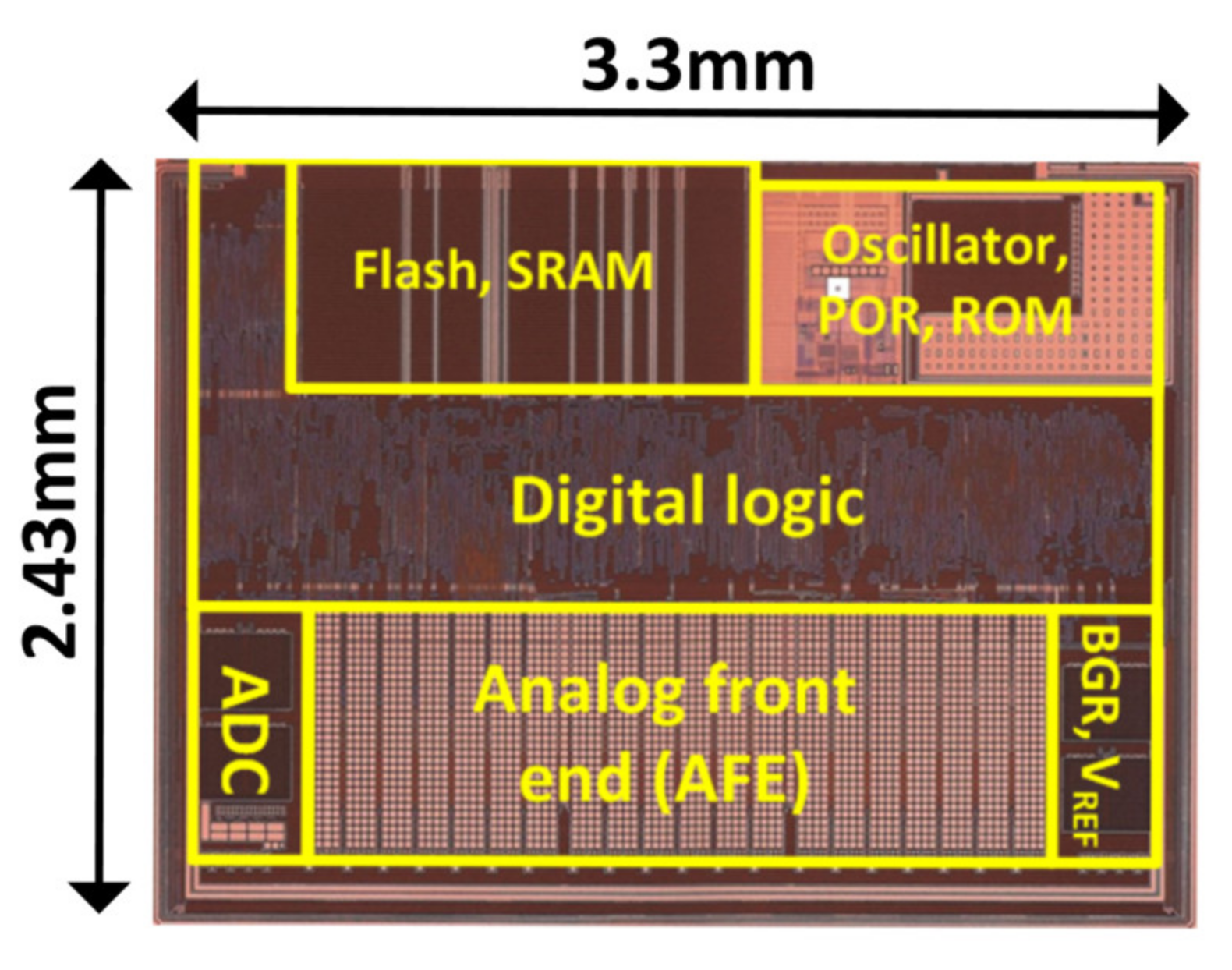
| Process | 130 nm | 180 nm | 180 nm | 350 nm |
| Electrodes | 31 TX and 16 RX | 16 TX and 33 RX | 36 TX and 64 RX | 15 TX and 10 RX |
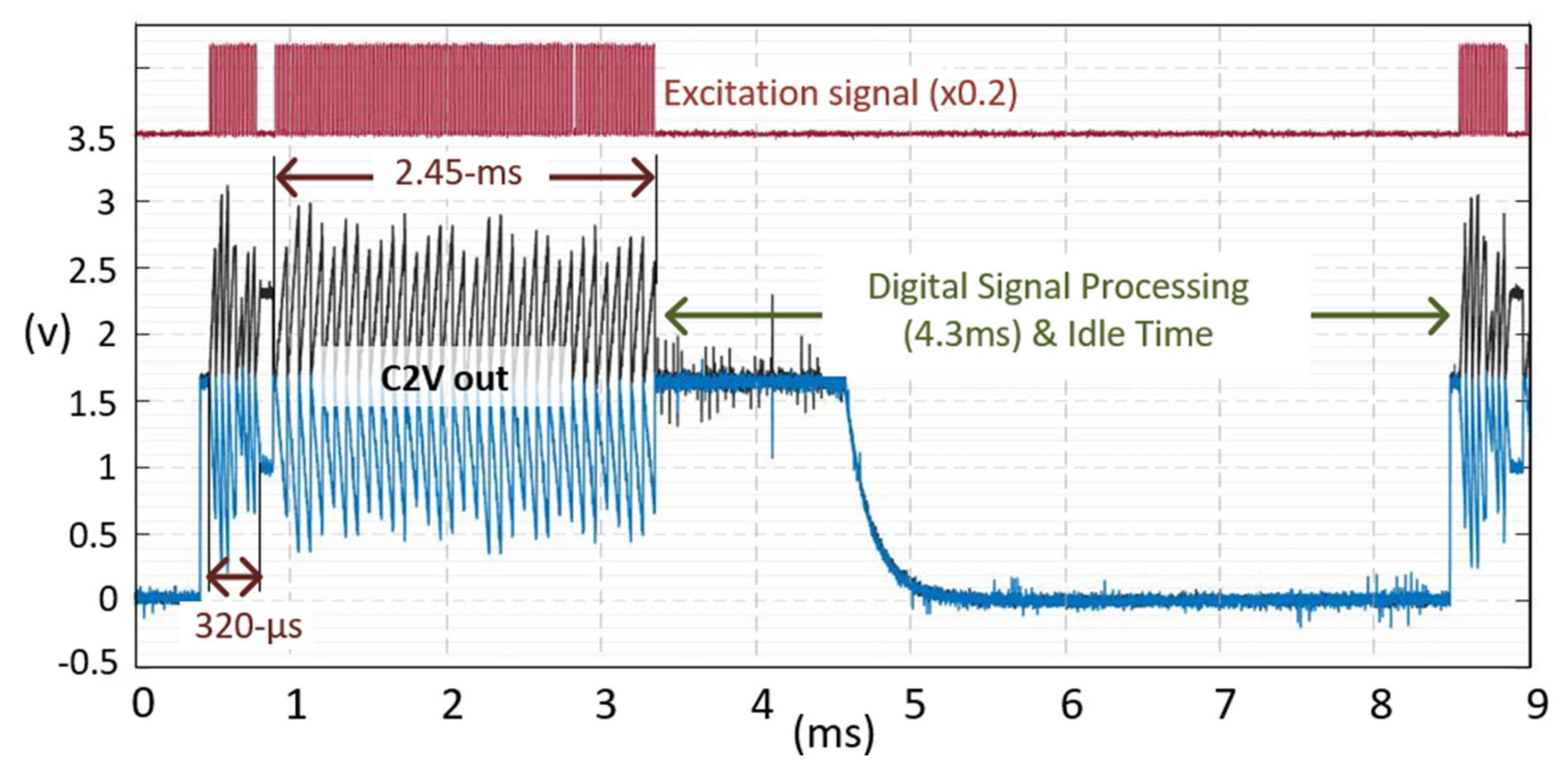
| Scan rate | 330 Hz (Synchronous to 120 Hz AMOLED) | 120Hz | 85~385Hz | 250 Hz |
| Power Consumption | 6.4 mW (AFE) 17.1 mW (Full chip) | 17.8 mW | 67.7 mW | 12.8 mW |
| Chip area | 3.4 mm2 (AFE) 8.02 mm2 (Full chip) | 7.1 mm2 | 36 mm2 | 4.89 mm2 |
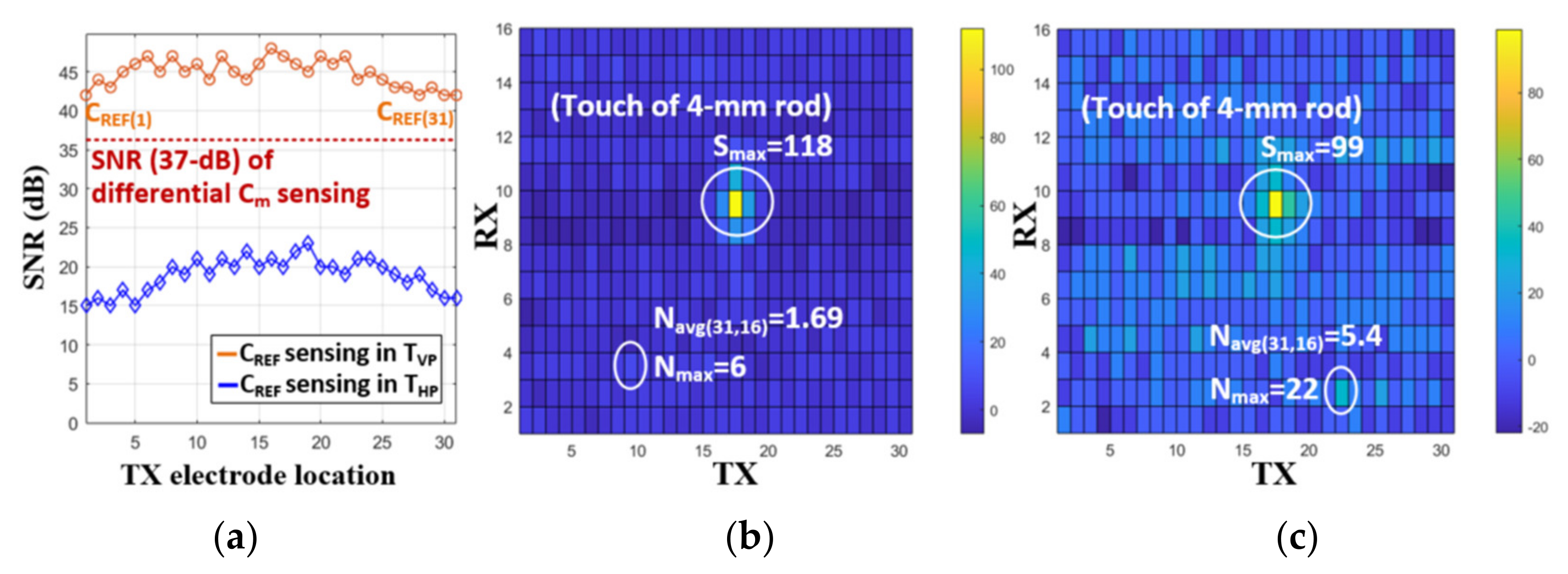
| SNR | 46 dB without display noise 37 dB with zebra pattern in 120 Hz AMOLED | 57 dB | 54 dB | 43 dB |
| TSP Type | ITO | Metal Mesh | ITO | Metal Mesh |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ko, S. A Mutual Capacitance Touch Readout IC with Synchronization in Touch and Mobile Display Driving for High Refresh Rate AMOLED Panels. Micromachines 2021, 12, 922. https://doi.org/10.3390/mi12080922
Ko S. A Mutual Capacitance Touch Readout IC with Synchronization in Touch and Mobile Display Driving for High Refresh Rate AMOLED Panels. Micromachines. 2021; 12(8):922. https://doi.org/10.3390/mi12080922
Chicago/Turabian StyleKo, Seunghoon. 2021. "A Mutual Capacitance Touch Readout IC with Synchronization in Touch and Mobile Display Driving for High Refresh Rate AMOLED Panels" Micromachines 12, no. 8: 922. https://doi.org/10.3390/mi12080922